Изобретение относится к области измерений механических параметров.
Известен датчик (см. патент US №5165279, кл. G 01 P 15/10, 06.06.1989 опубликован 24.11.92), который является наиболее близким по технической сущности к заявляемому устройству и взят в качестве прототипа. Датчик выполнен из плоского основания с образованием в нем чувствительного элемента, соединенного с ним через упругие шарниры подвеса и резонатор, свободно размещенные в его прорези. Резонатор электрически и механически связан с электромеханическим преобразователем, обеспечивающим возбуждение механических колебаний и обратного преобразования их в электрический сигнал. Кроме того, основание закрывается с обеих сторон крышками, которые крепятся по его периметру и имеют углубления для свободного хода чувствительного элемента.
Недостатком прототипа является более сложная технология изготовления, требующая двухстороннего глубокого травления плоской заготовки с образованием тонких перемычек с высокой точностью. Это приводит к большему технологическому разбросу и малому выходу готовых изделий.
Техническим результатом заявляемого датчика является упрощение технологии изготовления за счет изменения направления измерительной оси из положения, практически перпендикулярного плоскости заготовки, в положение, совпадающее с ней.
Технический результат достигается тем, что датчик резонаторный, содержащий основание, в котором выполнены сквозные прорези с образованием чувствительного элемента, его подвеса в виде стержня и стержневого резонатора, одни концы которых соединены с основанием, а другие концы соединены с чувствительным элементом, свободно размещенным в углублениях крышек, которые расположены по обе стороны основания и соединены с ним по периметру, один конец стержня подвеса через упругий шарнир соединен с основанием для перемещения чувствительного элемента в направлении измерительной оси, а другой конец стержня подвеса соединен с чувствительным элементом, стержневой резонатор электрически и механически соединен с электромеханическим преобразователем.
Новым является то, что стержневой резонатор расположен асимметрично относительно подвеса, жесткость упругого шарнира которого минимальна в направлении измерительной оси, расположенной в плоскости основания, и максимальна в направлении перпендикулярной плоскости основания, дополнительно за счет сквозных прорезей в основании образован, по крайней мере, один направляющий торсион, один конец которого соединен с основанием, а другой конец с чувствительным элементом для обеспечения перемещения чувствительного элемента в направлении измерительной оси, параллельной плоскости основания, и обеспечения максимальной жесткости в направлении, перпендикулярном плоскости основания. Направляющие торсионы имеют Z-образную форму, в местах изгиба которого и в точках соединения с чувствительным элементом и основанием выполнены упругие шарниры.
На фиг.1 изображен датчик резонаторный без крышек.
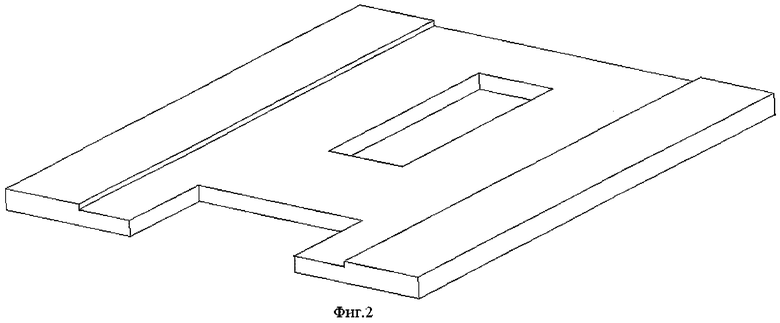
На фиг.2 изображена одна из двух идентичных крышек.
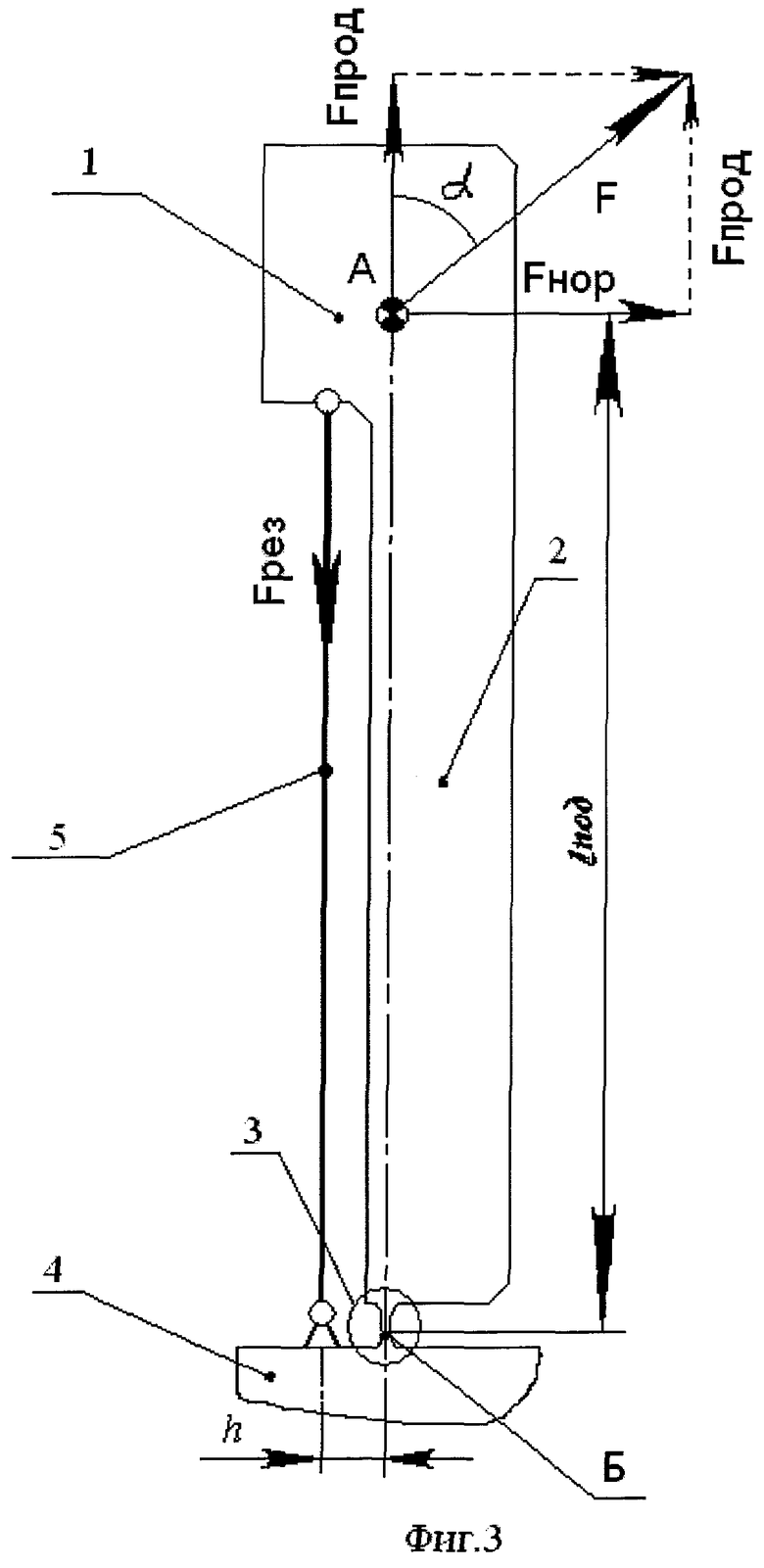
На фиг.3 изображена кинематическая схема датчика.
Устройство (фиг.1) содержит чувствительный элемент 1, соединенный через подвес 2 и его шарнир 3 с основанием 4, кроме этого, чувствительный элемент 1 соединен с основанием 4 посредством стержневого резонатора 5, выполненного, например, в виде двухветвевого камертона и одного или двух торсионов 6, 8 Z-образной формы, имеющих ослабления сечения в виде уменьшения ширины стержней в местах изгиба торсиона и его присоединения к чувствительному элементу 1 и основанию 4, образующих упругие шарниры 7, 9. Малая ширина упругих шарниров 3, 7, 9 по сравнению с их толщиной, равной толщине основания и, соответственно, толщине пластины заготовки, позволяет получить большую податливость в направлении измерительной оси по сравнению с другими направлениями.
Резонаторный датчик работает следующим образом. При действии на чувствительный элемент 1 силы F (см. фиг.3) в плоскости датчика в произвольном направлении в стержневом резонаторе 5 возникает сила Fрез., вызывающая изменение его резонансной частоты в соответствии с выражением (1):

где ƒ0 - начальное значение резонансной частоты при Fрез=0;
В - постоянный коэффициент, равный обратной величине критической силы резонатора (продольной сжимающей силы, при которой стержень теряет устойчивость)
где l, b, h - длина, ширина и толщина стержней резонатора (изгибные колебания стержней резонатора происходят в плоскости, совпадающей с его шириной);
Е, ρ - модуль упругости и плотность стержней резонатора.
Связь между продольной силой, действующей на резонатор, и силой, приложенной к чувствительному элементу, определяется из условия равновесия системы, изображенной на фиг.3:
1) Сумма моментов всех сил, действующих в системе, должна быть равна 0;
2) Сумма всех сил, действующих в системе, должна быть равна 0.
Из анализа системы фиг.3 следует:
где Fрез - продольная сила, действующая на резонатор;
Fнор - составляющая силы F, перпендикулярная линии, соединяющей точку приложения силы F с осью поворота шарнира;
α - угол между вектором силы F и линией АБ, соединяющей точку приложения силы с осью поворота подвеса в упругом шарнире;
Мр.ш - реактивный момент упругого шарнира;
lпод - расстояние от точки А приложения силы F до оси поворота упругого шарнира;
h - расстояние между осью упругого шарнира 3 и точкой соединения резонатора 5 с основанием 4.
Из выражения (4) определяется зависимость силы, действующей на стержневой резонатор от внешней силы F

Реактивный момент упругого шарнира Мр.ш зависит от момента F·lпод·sinα, вызывающего его деформацию. При рациональном конструировании датчика вклад Мр.ш должен быть значительно меньше суммарного момента, вызывающего появление продольной силы в резонаторе. В первом приближении зависимость Мр.ш от F·lпод·sinα можно принять как линейную:

где К<1 - постоянный коэффициент.
Тогда выражение для продольной силы, действующей на резонатор, примет вид:

В случае, когда на чувствительный элемент 1 действуют инерционные силы, вектор их равнодействующей прилагается к центру масс чувствительного элемента, а измерительная ось направлена по перпендикуляру к линии, соединяющей ось поворота упругого шарнира и центр масс, через который и проходит измерительная ось. Выражение для продольной силы, действующей на резонатор, будет иметь вид:

где m - масса чувствительного элемента;
а·cosβ - проекция вектора ускорения а на измерительную ось;
β - угол между вектором ускорения и измерительной осью.
Функция преобразования (характеристика преобразования) рассматриваемого датчика определяется выражениями (1), (6) или (7) с учетом (2), (3).
При действии составляющих сил, перпендикулярных плоскости датчика, в резонаторе не возникает продольных сил, а имеет место изгиб резонатора, его резонансная частота меняется весьма незначительно.
Для увеличения жесткости (уменьшения податливости) в направлениях, перпендикулярных к плоской части датчика, используются торсионы 6, (8), соединяющие чувствительный элемент 1 с основанием 4. Форма, размеры торсиона и места соединения с чувствительным элементом и основанием выбираются из условия обеспечения минимальной податливости чувствительного элемента 1 в направлении, перпендикулярном плоскости датчика, и максимальной податливости по измерительной оси. Одним из возможных вариантов исполнения такого торсиона является трехплечий торсион 6, 9 Z-образной формы, снабженный четырьмя упругими шарнирами, располагаемыми в местах сочленения между собой трех плеч с чувствительным элементом 1 и основанием 4. Для защиты упругих шарниров от повреждений при действии экстремальных нагрузок, определяемых условиями эксплуатации и находящихся вне диапазона измеряемых величин, с обеих сторон датчика установлены крышки, соединенные с его основанием 4 по периметру. В крышках с внутренней стороны в области расположения подвижных элементов датчика (чувствительный элемент 1, подвес 2, торсионы 6, 8) выполнены углубления, обеспечивающие свободное перемещение указанных элементов. При экстремальных нагружениях (например, ударах) в направлении, перпендикулярном плоскости датчика, крышки выполняют роль ограничителей перемещений элементов датчика, ограничивая тем самым в них механические напряжения на уровне, не превышающем предельные значения. Преобразование частоты механического резонанса резонатора 5 в частоту электрических сигналов выполняется с использованием электромеханического преобразователя, взаимодействующего с резонатором и усилителем электрических сигналов с положительной обратной связью, в контур которой включен электромеханический преобразователь. Электромеханические преобразователи могут выполняться с использованием различных физических явлений: пьезоэлектрические свойства материалов (пьезоэлектрические преобразователи); взаимодействие электрических зарядов (электростатические преобразователи); взаимодействие проводников с электрическим током с магнитным полем (магнитоэлектрические преобразователи). При изготовлении датчиков по микроэлектронной технологии имеется возможность миниатюрного выполнения с шириной стержней менее 50 мкм. Для этого случая наиболее предпочтительными являются электромеханические преобразователи магнитоэлектрического и электростатического типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2008 |
|
RU2371728C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2402020C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2013 |
|
RU2545324C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2410705C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2002 |
|
RU2217767C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2014 |
|
RU2579552C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2011 |
|
RU2477491C1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
Изобретение относится к области измерений механических параметров. Датчик содержит основание из материала с малыми акустическими затуханиями, в котором выполнены сквозные прорези с образованием чувствительного элемента с маятниковым подвесом в виде стержня и стержневого резонатора, концы которых соединены с основанием с одной стороны и чувствительным элементом с другой. Чувствительный элемент свободно размещен в углублениях крышек, которые расположены по обе стороны основания и соединены с ним по периметру. Измерительная ось датчика располагается в плоскости его основания, что достигается за счет асимметричного расположения резонатора относительно маятникового подвеса, соединенного с основанием упругим шарниром, отношение податливости которого в направлении измерительной оси и в ортогональном направлении значительно больше 1. Для увеличения этого отношения дополнительно введен торсион, соединяющий чувствительный элемент с основанием, в частном случае торсион имеет Z-образную форму. Техническим результатом является упрощение технологии изготовления за счет изменения направления измерительной оси, что позволяет иметь планарную конструкцию датчика. 1 з.п. ф-лы, 3 ил.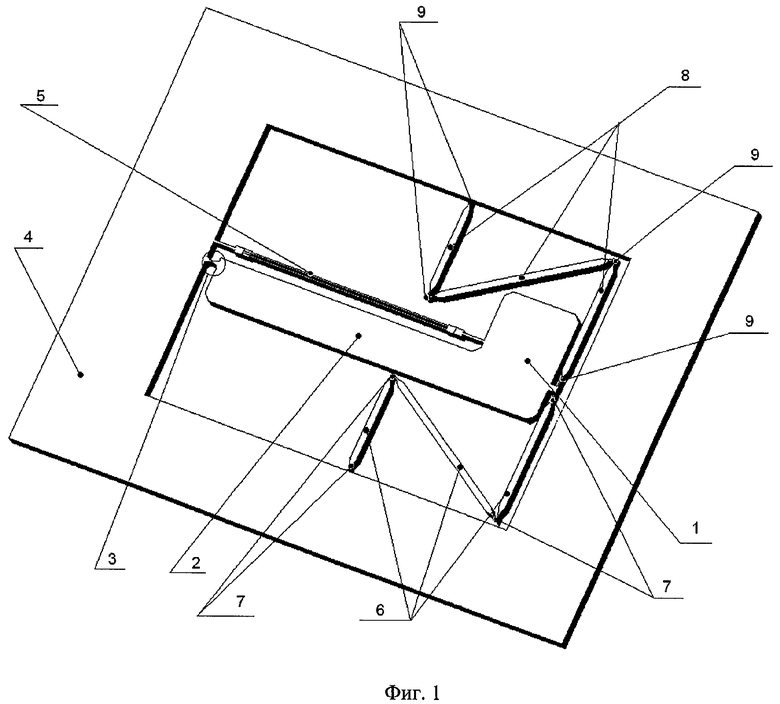
| US 5165279 A, 24.11.1992 | |||
| RU 2003100256 A, 27.06.2004 | |||
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2002 |
|
RU2217767C1 |
| Акселерометр | 1989 |
|
SU1677644A1 |
| US 5331854 A, 26.07.1994. | |||

