Изобретение относится к области измерительной техники, а именно к измерениям механических параметров.
Известен датчик резонаторный (см. патент RU №2217767, кл. G01P 15/10 от 01.04.2002 г., опубл. в БИ №33 27.11.2003).
Датчик содержит основание из монокристалла, в котором выполнены сквозные прорези с образованием чувствительного элемента в виде маятника с одной степенью свободы, соединенного с основанием через упругие шарниры, и стержневого резонатора, концы которого соединены с чувствительным элементом и основанием.
Указанное выше устройство является наиболее близким по технической сущности к заявляемому устройству и взято в качестве прототипа.
Недостатком прототипа является изменение углового положения измерительной оси датчика под действием измеряемой величины.
Решаемой технической задачей является создание датчика резонаторного с компенсацией отклонений измерительной оси в процессе измерений.
Достигаемым техническим результатом является снижение погрешности измерения механических параметров, обусловленной отклонением измерительной оси.
Для достижения технического результата в датчике резонаторном, содержащем первый маятник, выполненный в виде чувствительного элемента, соединенного с первым основанием через первые упругие шарниры, и силочувствительный резонатор, один конец которого соединен с чувствительным элементом, а другой конец - с первым основанием, новым является то, что введено второе основание, соединенное с первым основанием через вторые упругие шарниры с образованием второго маятника, при этом маятники расположены относительно друг друга таким образом, чтобы векторы, соединяющие центры масс маятников с их осями поворота, были противоположно направлены, а расстояние L2 от оси поворота второго маятника до его центра массы выбрано из условия

где L1 - расстояние от центра массы первого маятника до его оси поворота;
m1, m2 - значения масс первого и второго маятников соответственно (m2 равна сумме масс чувствительного элемента 1 и первого основания 2);
e1, e2 - угловые податливости перемещений первого и второго маятника относительно осей поворота первого и второго маятников соответственно.
На фигурах 1, 2 изображен заявляемый вариант конструкции датчика резонаторного, который включает в себя: первый маятник (чувствительный элемент 1), соединенный с первым основанием 2 через первые упругие шарниры 4; силочувствительный резонатор 8, один конец которого соединен с чувствительным элементом 1, а другой конец - с первым основанием 2; второй маятник (чувствительный элемент 1, соединенный с первым основанием 2 через первые упругие шарниры 4, силочувствительный резонатор 8, первое основание 2), соединенный со вторым основанием 3 через вторые упругие шарниры 5; 6 - центр масс первого маятника; 7 - центр масс второго маятника, масса которого равна сумме масс чувствительного элемента 1 и первого основания 2.
На фигуре 3 изображена кинематическая схема заявляемого устройства с первым маятником массой m1 с центром массы А(А') и вторым маятником массой m2 с центром массы В(В'), где:
ИО - направление измерительной оси датчика резонаторного,
j - вектор ускорения,
А(6) - положение центра масс первого маятника в исходном состоянии,
А'(6) - положение центра масс первого маятника при действии ускорения j,
О - ось поворота первого маятника в исходном положении,
О' - ось поворота первого маятника при действии ускорения j,
В(7) - центр массы второго маятника в исходном положении,
В'(7) - центр массы второго маятника при действии ускорения j,
O1 - положение оси поворота первого основания 2;
α - угол поворота первого маятника относительно второго маятника под действием ускорения j (∠AOA'=∠AO'A', см. фиг.3);
β - угол поворота второго маятника под действием ускорения j;
L1 - расстояние от оси поворота О первого маятника до его центра масс 6(A, A'),
L2 - расстояние от оси поворота O1 второго маятника до его центра масс 7(В, В');
А”О” - прямая линия, определяющая положение привалочной (монтажной) поверхности датчика относительно объекта (принадлежит второму основанию).
В исходном положении измерительная ось ИО устанавливается нормально к привалочной поверхности, заданной прямой А”О”, проходящей параллельно линии АО, соединяющей центр масс А первого маятника и ось поворота О первых упругих шарниров 4.
Введение второго маятника и его расположение относительно первого маятника определенным образом позволяет обеспечить поступательное движение первого маятника относительно второго основания, а второму маятнику иметь угловое перемещение относительно второго основания, обеспечивающее компенсацию углового перемещения измерительной оси датчика резонаторного, что уменьшает погрешности измерения механических параметров, обусловленные отклонением измерительной оси.
Устройство работает следующим образом.
В исходном состоянии - в состоянии покоя или равномерного прямолинейного движения объекта (ускорение j=0) между первым маятником и его основанием отсутствуют силы, влияющие на их перемещение относительно друг друга и относительно второго основания 3.
В случае ускоренного движения объекта, на котором жестко закреплено второе основание 3, возникают инерционные силы, создающие моменты M1, M2, которые вызывают угловые перемещения первого и второго маятников датчика. Центр масс 6(А) первого маятника перемещается в точку А' (фиг.3), а центр масс 7 (B) второго маятника перемещается в точку В', ось поворота первых упругих шарниров 4 перемещается из точки О в точку О'. Это приводит к изменению угловых положений первого маятника относительно второго маятника на угол α и второго маятника относительно второго основания 3 на угол β.
Таким образом, первый маятник участвует в двух движениях: относительном - вокруг оси О первых упругих шарниров 4 и переносном движении второго маятника вокруг оси O1 вторых упругих шарниров 5. Необходимым условием стабилизации углового положения измерительной оси ИО датчика относительно второго основания 3 является расположение маятников относительно друг друга таким образом, чтобы векторы, соединяющие центры масс маятников с их упругими шарнирами, были противоположно направлены, то есть углы α и β должны иметь разный знак. Дополнительным условием стабилизации углового положения измерительной оси ИО датчика является равенство, при котором

Значения углов α и β определяются значениями моментов М1 и M2 от инерционных сил, и угловыми податливостями первого и второго маятников.


где М1, М2 - моменты от инерционных сил, действующих на массу первого маятника, равную массе чувствительного элемента 1 (центр масс в точке 6), и на массу второго маятника, равную сумме масс первого основания 2 и чувствительного элемента 1 (центр масс в точке 7);
F1, F∑ - проекции инерционных сил на нормали к отрезкам А'О', B'O1 соответственно (см. фиг.2);
L1 - расстояние от центра массы 6 (А) первого маятника до его оси поворота (О);
L2 - расстояние от центра массы 7 (В) первого маятника до его оси поворота (О1);
m1, m2 - массы первого и второго маятников;
j·cosγ - компонента ускорения центра масс (6) первого маятника, обуславливающая его угловое перемещение относительно первого основания 2;
j·cos(γ+φ) - компонента ускорения центра массы (7) второго маятника, обуславливающая его угловое перемещение относительно второго основания 3;
γ - угол между вектором ускорения j и направлением измерительной оси ИО (нормаль к АО);
φ0 - угол между направлением измерительной оси ИО и нормалью к BO1 в исходном положении.
При малых значениях углов α и β (что, как правило, реализуется практически), длины дуг  ,
,  сходятся к отрезкам АА', ВВ'
сходятся к отрезкам АА', ВВ'


где h1 (AA'), h2 (BB') - расстояния, на которые перемещаются центр масс (6) первого маятника (АА') и его ось поворота О (ВВ');
α - угол, определяющий угловое перемещение первого маятника относительно первого основания 2;
β - угол, определяющий угловое перемещение второго маятника (первого основания) относительно второго основания 3.
Используя соотношения (4), (5), с учетом (1) находим соотношения углов

С другой стороны, углы |α| и |β| равны


где е1 - угловая податливость первых упругих шарниров 4,
e2 - угловая податливость вторых упругих шарниров 5.
Отношение (6) с учетом соотношений (1), (2), (3) и (7), (8) может быть представлено в виде

где при малых значениях углов φ0, β

В реальной конструкции максимальные значения углов α, β и φ0 не превышают значения 0,01-0,03 рад. Максимальные значения углов α и β реализуются при малых значениях угла γ, для которых проекции инерциальных сил F1, FΣ на измерительную ось ИО и нормаль к BO1 имеют максимальные значения (см. фиг.3). С учетом малости углов α и β (cos(φ0-β)→1) значение отношения (10) может быть принята равным 1, а выражение (9) может быть представлено

С учетом этого отрезок прямой L2, соединяющий ось поворота (О1) первого основания 2 с центром суммарной массы (В) первого основания 2 и чувствительного элемента 1 будет определяться выражением

Таким образом, для обеспечения компенсации отклонений измерительной оси датчика резонаторного условие (1) при заданных значения масс первого m1 и второго m2 маятников необходимо расположить маятники относительно друг друга таким образом, чтобы векторы, соединяющие центры масс маятников с их осями поворота, были противоположно направлены, а расстояние L2 от оси поворота второго маятника до его центра массы определялось согласно формуле (11).
Были проведены исследования, которые показали возможность реализации заявленного устройства, позволяющего на порядок уменьшить изменение углового положения измерительной оси. Эффективность предлагаемого технического решения по стабилизации положения измерительной оси датчика резонаторного с маятниковым чувствительным элементом подтверждена расчетами на ЭВМ с использованием метода конечных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2410705C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2014 |
|
RU2579552C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2402020C1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2008 |
|
RU2371728C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2011 |
|
RU2483283C2 |


Изобретение относится к измерительной технике и может быть использовано для измерений ускорения и других параметров. Согласно изобретению, датчик резонаторный содержит первый маятник, выполненный в виде чувствительного элемента, соединенного с первым основанием через первые упругие шарниры, и силочувствительный резонатор, один конец которого соединен с чувствительным элементом, а другой конец - с первым основанием. Особенность изобретения заключается в том, что датчик резонаторный снабжен вторым основанием, соединенным с первым основанием через вторые упругие шарниры, с образованием второго маятника, при этом маятники расположены относительно друг друга таким образом, чтобы векторы, соединяющие центры масс маятников с их осями поворота, были противоположно направлены, а расстояния от центров масс первого и второго маятников до их осей поворота удовлетворяют приведенному в формуле изобретения и описании соотношению, обеспечивающему, в первом приближении, отсутствие отклонения измерительной оси под действием измеряемой величины. Благодаря этому, обеспечивается снижение погрешности измерения ускорения и других измеряемых параметров. 3 ил.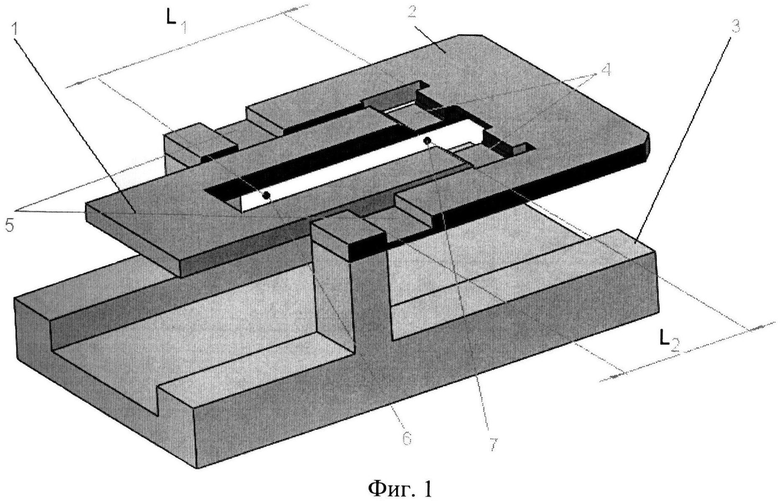
Датчик резонаторный, содержащий первый маятник, выполненный в виде чувствительного элемента, соединенного с первым основанием через первые упругие шарниры, и силочувствительный резонатор, один конец которого соединен с чувствительным элементом, а другой конец - с первым основанием, отличающийся тем, что введено второе основание, соединенное с первым основанием через вторые упругие шарниры с образованием второго маятника, при этом маятники расположены относительно друг друга таким образом, чтобы векторы, соединяющие центры масс маятников с их осями поворота, были противоположно направлены, а расстояние L2 от оси поворота второго маятника до его центра массы выбрано из условия:
 ,
,
где L1 - расстояние от центра массы первого маятника до его оси поворота;
m1, m2 - значения масс первого и второго маятников;
e1, e2 - угловые податливости перемещений первого и второго маятников относительно осей поворота первого и второго упругих шарниров.
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2002 |
|
RU2217767C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2410705C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2402020C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| US 5165279 A, 24.11.1992 | |||
| US 5331854 A, 26.07.1994 | |||
| US 5060039 A, 22.10.1991 | |||
| US 5392650 A, 28.02.1995. | |||

