Изобретение относится к области измерительной техники, а именно измерениям механических параметров.
Известен датчик резонаторный (см. патент RU №2217767, кл. G01P 15/6 от 01.04.2002 г., опубликован в БИ №33, 27.11.2003).
Датчик содержит основание из монокристалла, в котором выполнены сквозные прорези с образованием чувствительного элемента с маятниковым подвесом в виде двух стержней и стержневого резонатора, концы которых соединены основанием с одной стороны и чувствительным элементом - с другой. Чувствительный элемент свободно размещен в углублениях крышек, которые расположены по обе стороны основания и соединены с ним по периметру.
Указанное выше устройство является наиболее близким по технической сущности к заявляемому устройству и взято в качестве прототипа.
Недостатком прототипа является недостаточный уровень ударопрочности и устойчивости к действию вибраций.
Решаемой технической задачей является создание датчика резонаторного с повышенным уровнем ударопрочности и устойчивости к действию вибраций.
Достигаемым техническим результатом является эффективное демпфирование резонансных колебаний чувствительного элемента датчика. Для достижения технического результата в датчике резонаторном, содержащем чувствительный элемент, выполненный в виде маятника с одной степенью свободы, соединенный через упругие шарниры с первым основанием, и силочувствительный резонатор, концы которого соединены соответственно с чувствительным элементом и первым основанием, новым является то, что дополнительно введено второе основание, соединенное с первым основанием через упругие элементы, при этом чувствительный элемент и первое основание имеют возможность ограниченного перемещения относительно второго основания. Введение второго основания, упруго связанного с первым основанием, позволяют получить механическую систему с двумя степенями свободы, что позволяет обеспечить вибро- и ударопрочность заявляемого устройства.
На фиг.1 показана конструкция заявляемого устройства.
На фиг.2 представлены чувствительный элемент, выполненный в виде маятника, соединенный с первым основанием посредством упругих шарниров, с одним из концов резонатора, второй конец которого соединен с первым основанием.
На фиг.3, 4 представлена механическая и электрические схемы заявляемого датчика.
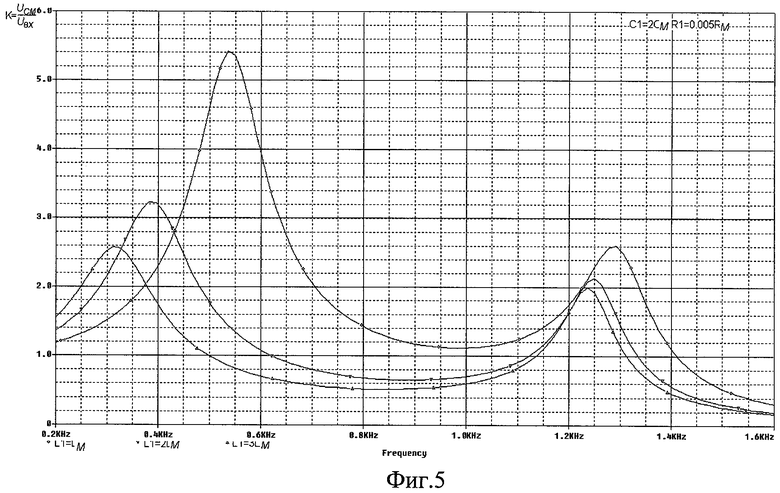
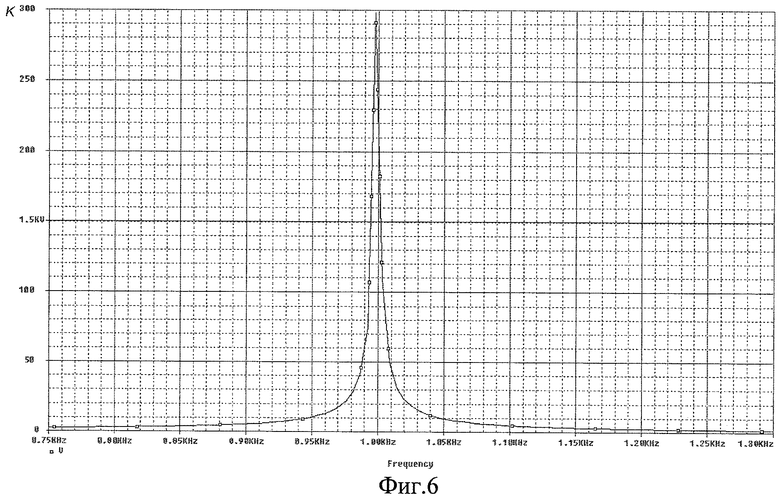
На фиг.5, 6 представлены амплитудно-частотные характеристики для различных сочетаний значений параметров механической системы предлагаемого датчика и его электрического аналога.
Датчик резонаторный (см. фиг.1, 2) состоит из чувствительного элемента, выполненного в виде физического маятника 1, соединенного упругими шарнирами 2 с первым основанием 4 и одним из концов резонатора 3, второй конец которого соединен с первым основанием 4, которое, в свою очередь, с помощью упругих элементов 6 соединено со вторым основанием 5. Силочувствительный резонатор 3 располагается симметрично относительно упругих шарниров 2, при этом между осью поворота маятника 1 и нейтральной осью резонатора 3 имеется некоторое расстояние h. Значение резонансной частоты механических колебаний силочувствительного резонатора 3 определяется его геометрическими размерами, свойствами материала, из которого он изготовлен, и значением продольной силы, действующей на резонатор. Зависимость резонансной частоты от значения продольной силы резонатора используется для преобразования входной величины датчика в значение резонансной частоты резонатора. Резонатор снабжен электромеханическим преобразователем, обеспечивающим преобразование механических колебаний резонатора в электрический сигнал (на фигурах не показано).
Второе основание 5 датчика жестко соединено с объектом при измерениях параметров его движения. На втором основании 5 выполнены ограничители перемещения 7 маятника 1 и первого основания 4 в пределах допустимых значений, которые предохраняют элементы датчика от разрушений при экстремальных механических нагрузках (ударах). Винты 8 обеспечивают регулировку положения маятника 1 относительно второго основания 5. Дополнительное тело 9, присоединенное к маятнику, используется для нормирования коэффициента преобразования датчика резонаторного.
Второе основание 5 может быть выполнено из двух частей. Упругий элемент 6 соединен с первым основанием 4 в области А и со вторым основанием 5 в области Б.
В исходном состоянии (в состоянии покоя или равномерного прямолинейного движения объекта) маятник 1 не испытывает действия внешних сил. При этом прямая линия, соединяющая ось его поворота и центр масс должна совпадать с вектором силы тяжести, а объект должен находиться в состоянии покоя или равномерного прямолинейного движения. В этом случае маятник 1 не испытывает действия внешних сил и не оказывает силового воздействия на силочувствительный резонатор 3, его резонансная частота равна начальному значению, соответствующему нулевому значению продольной силы резонатора.
В случае ускоренного движения объекта, на котором жестко закреплено второе основание 5 датчика, это движение передается первому основанию 4 через упругие элементы 6, что приводит к появлению инерционной силы, действующей на маятник 1, которая создает момент, вызывающий угловое смещение маятника 1 относительно исходного положения на некоторый угол Δα. При постоянном значении ускорения движения объекта маятник 1 устанавливается в некоторое равновесное положение, при котором момент, создаваемый инерционной силой, уравновешивается суммой моментов: от продольной силы резонатора 3 (обусловленной поворотом маятника вокруг оси, не совпадающей с продольной осью резонатора) и реактивным моментом упругого шарнира 2.
Условие равновесия выражается следующей формулой:

Ми=j·mч.э.·Lц.м.·cosφ; Mp=Pp·h; Мш=Δα·Сш,
где Ми, - момент инерционной силы, действующий относительно оси поворота маятника 1;
Мр - момент от продольной силы резонатора 3;
Мш - реактивный момент упругого шарнира 2;
j - значение модуля вектора ускорения;
Pp - продольная сила, действующая на резонатор 3;
mч.э. - масса чувствительного элемента (маятника 1);
Lц.м. - расстояние между центром масс маятника 1 и осью поворота (ось поворота упругого шарнира 2);
φ - угол между направлением вектора ускорения и нормалью (перпендикуляром) к прямой линии, соединяющей центр массы маятника 1 и ось его поворота в упругих шарнирах 2;
h - значение расстояния между осью поворота маятника 1 и нейтральной осью резонатора 3;
Δα - угловое перемещение маятника 1 от исходного положения под действием инерционной силы;
Сш - жесткость (упругость) упругих шарниров 2.
Поворот маятника 1 на угол Δα обусловлен деформацией резонатора 3 под действием продольной силы Pp и в первом приближении может быть представлен линейной зависимостью:

где k - постоянный коэффициент, определяемый податливостью резонатора, расположением мест крепления его концов на маятнике 1 и первом основании 4, и расстоянием h между резонатором и осью поворота маятника.
Предельное допустимое значение продольной силы резонатора  определяется его прочностью и задается, допустим, угловым перемещением маятника Δαдоп.. Значение Δαдоп. задается выбором значения зазора между маятником 1 и ограничителями его перемещения 7, расположенными на втором основании 5.
определяется его прочностью и задается, допустим, угловым перемещением маятника Δαдоп.. Значение Δαдоп. задается выбором значения зазора между маятником 1 и ограничителями его перемещения 7, расположенными на втором основании 5.
Продольная сила резонатора, возникающая вследствие ускоренного движения объекта с установленным на нем датчиком, определяется выражением, полученным из выражений (1), (2):

Величина j·cosφ=jx представляет собой компоненту ускорения, действующую в направлении измерительной оси ОХ датчика; величины mч.э., Lц.м., h, k, сш являются константами датчика. Для датчика, в котором справедливо соотношение (2), продольная сила резонатора 3 зависит от значения компоненты ускорения объекта в направлении измерительной оси датчика. В связи с зависимостью значения резонансной частоты резонатора 3 от значения, действующей на него продольной силы, изменение резонансной частоты под действием ускоренного движения будет определять значение ускорения. Преобразование резонансной частоты резонатора в частоту электрических сигналов осуществляется посредством подключения электромеханического преобразователя резонатора (на фигурах не показано) к автогенератору в качестве частотозадающего элемента.
В случае, когда на второе основание 5 датчика, помимо постоянного (квазистатического) ускорения, действует и переменная составляющая (например, вибрация), возникает переменная составляющая продольной силы резонатора 3. При этом в системе: маятник, резонатор, первое и второе основания, будут иметь место колебания маятника и первого основания. Амплитуда этих колебаний зависит от частоты переменной составляющей ускорения и параметров системы, определяемых массой маятника 1, упругостью резонатора 3 и упругого элемента 6 (соединяющего первое основание 4 со вторым основанием 5) и диссипативными потерями в упругих элементах. Для обеспечения высоких метрологических характеристик датчика в контуре, содержащем маятник 1, упругий шарнир 2, первое основание 4, резонатор 3 дисипативные потери в упругодеформируемых элементах (упругий шарнир 2, резонатор 3) должны быть минимально возможными. При этом в случае жесткого соединения первого основания 4 со вторым основанием 5 большой массы, что характерно для прототипа, образуется высокодобротная резонансная система. В этой системе под действием переменной составляющей ускорения (например, широкополосная вибрация) маятник 1 может иметь амплитуду колебаний, достигающую значений ограничения Δαдоп.. При этом ограничение амплитуды колебаний маятника будет происходить за счет его соударения с ограничителями 7, что, в свою очередь, приведет к детектированию колебаний и возникновению недопустимо больших погрешностей. Для исключения этих погрешностей маятник 1 должен быть оснащен демпфером, гасящим резонансные колебания маятника. При этом демпфирование не должно ухудшать метрологические характеристики датчика.
В заявляемом датчике демпфирование резонансных колебаний маятника 1 осуществляется за счет введения второго основания 5 и упругой связи с ним первого основания 4 с помощью упругих элементов 6, имеющих увеличенные механические (диссипативные) потери. В этом случае колебания маятника 1 относительно первого основания 4 взаимно связаны с его колебаниями относительно второго основания 5. Таким образом, заявляемый датчик представляет собой механическую систему с двумя степенями свободы. В этой системе маятник 1 при продольных деформациях силочувствительного резонатора 3 совершает угловые перемещения относительно первого основания 4, которое, в свою очередь, совершает угловое или поступательное движение относительно второго основания 5, жестко соединенное с объектом, ускорение движения которого измеряет датчик. Поведение механической системы с двумя степенями свободы может быть определено анализом принципиальной механической схемы. На фиг.3 представлена упрощенная механическая схема датчика, где:
mM - инерционность маятника 1 (масса, момент инерции);
lM - податливость упругой связи маятника 1 с первым основанием 4 (определяется податливостью резонатора 3 и упругих шарниров 2);
m1 - инерционность первого основания 4 (масса, момент инерции);
mΣ - суммарная масса второго основания и масса объекта (при их жестком соединении);
l1 - податливость упругой связи (упругого элемента 6) первого основания 4 со вторым основанием 5;
SM, S1 - коэффициенты вязкого трения (сопротивления трения) упругих связей маятника с первым основанием и первого основания со вторым, соответственно.
Параметры механической системы датчика mM, lM выбираются исходя из требований по обеспечению коэффициента преобразования для заданного диапазона измеряемых значений ускорения; коэффициент трения SM упругой связи маятника с первым основанием должен иметь минимально возможное значение. Необходимое демпфирование колебаний маятника обеспечивается выбором отношений  ;
;  и значением S1 или отношением
и значением S1 или отношением  . Для выбора оптимальных значений, указанных выше параметров, необходимо решение дифференциальных уравнений движения элементов механической системы. Вид этих уравнений аналогичен уравнениям, описывающим процессы в электрических цепях. Это позволяет проводить анализ и расчеты механических систем с использованием методов анализа электрических схем (см. Г.А.Филатов и др. Малогабаритные низкочастотные механические фильтры, «Связь», 1984 г. или А.Ленк. Электромеханические системы «Мир», Москва, 1978 г.). Принципиальная схема механической системы датчика согласно фиг.3 с использованием второй системы электромеханических аналогий представлена на фиг.4,
. Для выбора оптимальных значений, указанных выше параметров, необходимо решение дифференциальных уравнений движения элементов механической системы. Вид этих уравнений аналогичен уравнениям, описывающим процессы в электрических цепях. Это позволяет проводить анализ и расчеты механических систем с использованием методов анализа электрических схем (см. Г.А.Филатов и др. Малогабаритные низкочастотные механические фильтры, «Связь», 1984 г. или А.Ленк. Электромеханические системы «Мир», Москва, 1978 г.). Принципиальная схема механической системы датчика согласно фиг.3 с использованием второй системы электромеханических аналогий представлена на фиг.4,
где CM - емкость конденсатора - аналог массы mM;
LM - индуктивность - аналог податливости lM;
С1 - емкость конденсатора - аналог массы m1;
L1 - индуктивность - аналог податливости l1;
 ,
,  - проводимости - аналоги коэффициентов вязкого трения SM и S1 соответственно;
- проводимости - аналоги коэффициентов вязкого трения SM и S1 соответственно;
Uвх,  ,
,  - напряжения на элементах эквивалентной схемы - аналоги скоростей Vвх(t), V1(t), VM(t) соответственно;
- напряжения на элементах эквивалентной схемы - аналоги скоростей Vвх(t), V1(t), VM(t) соответственно;
Iвх, IM - входной ток и ток в цепи LM, CM - аналоги сил, действующих в упругих связях l1, lM соответственно.
Таким образом, выбор оптимального отношения податливостей  , и коэффициентов вязкого трения
, и коэффициентов вязкого трения  может быть осуществлен выбором отношений индуктивностей LM, L1 и сопротивлений R1, RM в электрическом аналоге (фиг.4). С помощью компьютерного моделирования процессов с использованием программы PSpice (MicroCap, DesignLab и др.) можно получить частотные зависимости отношения амплитуды напряжения на конденсаторе СМ - аналог амплитуды скорости колебаний маятника к амплитуде входного напряжения - аналог амплитуды скорости перемещения второго основания датчика для различных значений отношений
может быть осуществлен выбором отношений индуктивностей LM, L1 и сопротивлений R1, RM в электрическом аналоге (фиг.4). С помощью компьютерного моделирования процессов с использованием программы PSpice (MicroCap, DesignLab и др.) можно получить частотные зависимости отношения амплитуды напряжения на конденсаторе СМ - аналог амплитуды скорости колебаний маятника к амплитуде входного напряжения - аналог амплитуды скорости перемещения второго основания датчика для различных значений отношений  ,
,  и
и  . При этом в качестве исходных значений параметров датчика принято:
. При этом в качестве исходных значений параметров датчика принято:  - равенство значений резонансных частот механических и электрических колебаний.
- равенство значений резонансных частот механических и электрических колебаний.
Для прототипа  ,
,  ; Q=400,
; Q=400,
где  - резонансная частота механической системы прототипа l1=0 (L1=0, жесткое соединение первого и второго оснований);
- резонансная частота механической системы прототипа l1=0 (L1=0, жесткое соединение первого и второго оснований);
Q - добротность механической системы прототипа при отсутствии демпфирования.
Задавая произвольное значение С^, находим соответствующее ему значения LM и RM, обеспечивающие и Q=400. Задаваясь отношением mM и m1 и равным ему отношением СМ к С1, вычисляются частотные зависимости напряжения на конденсаторе СМ для различных значений L1, R1 - аналогов податливости l1 упругой связи первого и второго оснований и коэффициента вязкого трения. По значению отношения напряжений  к Uвх можно определить условия, обеспечивающие требуемое демпфирование колебаний маятника. На фиг.5 представлены частотные зависимости отношений напряжений на конденсаторе СМ (аналог амплитуды скорости колебаний маятника) к амплитуде на входе Uвх (аналог амплитуды переменной скорости второго основания датчика) kM для трех значений L1, определяющих отношения
к Uвх можно определить условия, обеспечивающие требуемое демпфирование колебаний маятника. На фиг.5 представлены частотные зависимости отношений напряжений на конденсаторе СМ (аналог амплитуды скорости колебаний маятника) к амплитуде на входе Uвх (аналог амплитуды переменной скорости второго основания датчика) kM для трех значений L1, определяющих отношения  , равные 1, 2 и 3 соответственно, при R1=0,0057RM и С1=2СМ; на фиг.6 представлена частотная зависимость того же параметра для прототипа (L1=0, Q=400) без демпфирующего устройства. Частотные зависимости амплитуд электрического напряжения на конденсаторе СМ и соответствующего ему аналогу - амплитуды скорости перемещения маятника имеют два экстремума с относительными значениями (отношение
, равные 1, 2 и 3 соответственно, при R1=0,0057RM и С1=2СМ; на фиг.6 представлена частотная зависимость того же параметра для прототипа (L1=0, Q=400) без демпфирующего устройства. Частотные зависимости амплитуд электрического напряжения на конденсаторе СМ и соответствующего ему аналогу - амплитуды скорости перемещения маятника имеют два экстремума с относительными значениями (отношение  ), находящимися в пределах 2…5,4; у прототипа без демпфирования - это отношение равно значению добротности Q≈400; использование магнитоэлектрического демпфера позволяет уменьшать добротность на порядок (до 30…40). В предлагаемом устройстве можно обеспечить более эффективное демпфирование. Необходимое значение коэффициента вязкого трения упругой связи S1 (упругого элемента 6) первого основания 4 со вторым основанием 5 может быть обеспечено при использовании эластичных демпфирующих компаундов, например, на основе кремнеорганических соединений (силиконов). Упругий элемент с увеличенными механическими (диссипативными) потерями может быть выполнен также в виде нескольких соприкасающихся пластин (типа рессоры) с изгибной формой деформации.
), находящимися в пределах 2…5,4; у прототипа без демпфирования - это отношение равно значению добротности Q≈400; использование магнитоэлектрического демпфера позволяет уменьшать добротность на порядок (до 30…40). В предлагаемом устройстве можно обеспечить более эффективное демпфирование. Необходимое значение коэффициента вязкого трения упругой связи S1 (упругого элемента 6) первого основания 4 со вторым основанием 5 может быть обеспечено при использовании эластичных демпфирующих компаундов, например, на основе кремнеорганических соединений (силиконов). Упругий элемент с увеличенными механическими (диссипативными) потерями может быть выполнен также в виде нескольких соприкасающихся пластин (типа рессоры) с изгибной формой деформации.
Разделение основания маятника на две части и введение упругой связи между ними позволяет не только обеспечить виброустойчивость датчика за счет эффективного демпфирования, но и повысить ударопрочность за счет уменьшения передачи ударных ускорений и растягивания во времени фронта нарастания ускорения. Для защиты от разрушения элементов датчика под действием экстремальных механических нагрузок используются ограничители 7 перемещения маятника 1 и первого основания 4. Ограничители 7 располагаются на втором основании.
Был изготовлен и испытан макет, подтверждающий работоспособность предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2410705C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2011 |
|
RU2477491C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2014 |
|
RU2579552C1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2402020C1 |
| Микроэлектромеханический первичный преобразователь ускорения | 2017 |
|
RU2657351C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2008 |
|
RU2371728C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2013 |
|
RU2541375C1 |
Изобретение относится к измерениям механических параметров, в частности силы или ускорения. Датчик резонаторный содержит чувствительный элемент, выполненный в виде маятника с одной степенью свободы, соединенный через упругие шарниры с первым основанием, и силочувствительный резонатор, концы которого соединены с чувствительным элементом и первым основанием, дополнительно введено второе основание, соединенное с первым основанием через упругие элементы, при этом чувствительный элемент и первое основание имеют возможность ограниченного перемещения относительно второго основания. Технический результат - эффективное демпфирование резонансных колебаний чувствительного элемента датчика. 6 ил.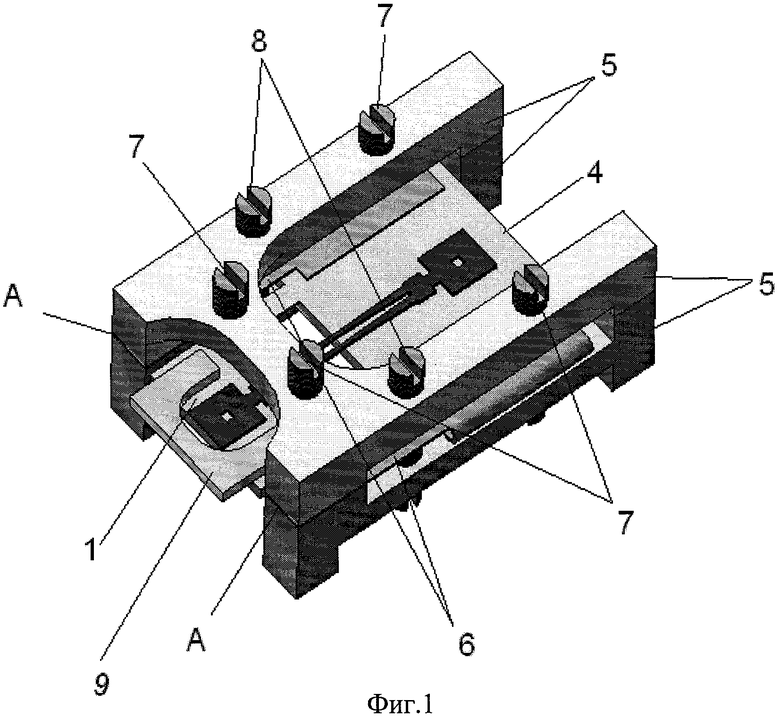
Датчик резонаторный, содержащий чувствительный элемент, выполненный в виде маятника с одной степенью свободы, соединенный через упругие шарниры с первым основанием, и силочувствительный резонатор, концы которого соединены соответственно с чувствительным элементом и первым основанием, отличающийся тем, что дополнительно введено второе основание, соединенное с первым основанием через упругие элементы, при этом чувствительный элемент и первое основание имеют возможность ограниченного перемещения относительно второго основания.
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2002 |
|
RU2217767C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
| US 5331854 A, 26.07.1994 | |||
| US 5165279 A, 24.12.1992. | |||

