Изобретение относится к гироскопической технике, а именно к гиростабилизаторам, и может быть использовано для подавления колебаний в системах, объекты которых содержат одно или несколько колебательных звеньев.
Известен двухосный силовой гиростабилизатор, содержащий: два гироблока, оси вращения которых параллельны, координатный преобразователь, систему разгрузки, привод корпусов гироблоков и ротора координатного преобразователя относительно платформы вокруг оси, коллинеарной осям прецессии гироблоков, отличающийся тем, что с целью повышениия точности, он снабжен жестко соединенным с корпусом гироблока маховичком, собственная ось вращения которого направлена по биссектрисе угла, составленного собственными осями вращений роторов гироскопов, а привод корпусов гироблоков, маховичка и ротора координатного преобразователя выполнен червячным (А.с. СССР, G01C 19/00, №295976).
Недостатки данного двухосного силового гиростабилизатора:
1. Использование двух гироскопов влечет за собой увеличение массы конструкции и его стоимость.
2. Возможные трудности настройки в целях обеспечения необходимой точности стабилизации из-за сложной конструкции двухгироскопного стабилизатора.
3. Использование червячных редукторов приводов корпусов гироблоков, маховичка и ротора координатного преобразователя увеличивает время подавления прецессии гироскопа.
Другим известным изобретением является одноосный силовой горизонтальный гиростабилизатор, содержащий гироскоп с вертикальной осью ротора в кардановом подвесе, цепь коррекции, включающую последовательно соединенные датчик угла прецессии, на внутренней оси подвеса, усилитель и двигатель на наружной оси подвеса, и цепь приведения, включающую последовательно соединенные маятниковый датчик угла на внутренней оси подвеса, отличающийся тем, что с целью уменьшения ошибки на вираже объекта в него введены последовательно соединенные датчик линейной скорости объекта в горизонтальной плоскости вдоль наружной оси подвеса и суммирующее преобразующее устройство, включенное во входную цепь усилителя цепи межрамочной коррекции (А.с. СССР, С01С 19/44, №790923).
Недостатки стабилизатора:
1. Датчик линейной скорости, предназначенный для уменьшения ошибки при движении по дуге, функционирует только вдоль наружной оси подвеса, что снижает точность и увеличивает время стабилизации платформы.
2. Отсутствие в стабилизаторе устройств, исключающих влияние деформаций ротора гиростабилизатора на процесс автоматического регулирования стабилизации объекта, что ведет к снижению точности системы стабилизации.
Наиболее близким к предлагаемому изобретению относится одноосный стабилизатор, содержащий двухстепенной гироскоп с датчиком момента и датчиком угла прецессии, выход которого через усилитель стабилизации соединен с двигателем стабилизации, последовательно соединенные акселерометр и усилитель коррекции, отличающийся тем, что с целью повышения точности в него дополнительно введены переключатель и оптимальный линейный фильтр, включающий первый и второй сумматоры, второй и третий масштабирующие элементы, при этом выход датчика угла прецессии дополнительно соединен с неинвертирующим входом первого сумматора, выход первого сумматора соединен через первый масштабирующий элемент с неинвертирующим входом второго сумматора, выход которого соединен с интегратором, выход интегратора соединен через второй масштабирующий элемент с инвертирующим входом второго сумматора, через третий масштабирующий элемент соединен с инвертирующим входом первого сумматора и соединен с первым входом переключателя, выход усилителя коррекции соединен со вторым входом переключателя, а выход переключателя соединен со входом датчика момента (А.с. СССР, 01С 21/18, №1779930).
Недостатками изобретения являются:
1. Невозможность стабилизации раскачивания объекта в обеих вертикальных плоскостях.
2. Отсутствие в стабилизаторе устройств, исключающих влияние деформаций ротора гиростабилизатора на процесс автоматического регулирования стабилизации объекта, что ведет к снижению точности системы стабилизации.
Задачей изобретения является повышение эффективности гашения колебаний в двух взаимно перпендикулярных вертикальных плоскостях за счет расширения его конструктивных особенностей.
Поставленная задача достигается одноосным силовым гиростабилизатором, содержащим двухстепенной гироскоп с датчиком угла прецессии, выход которого через усилитель стабилизации соединен с двигателем стабилизации, последовательно соединенные акселерометр и усилитель коррекции, с целью повышения точности в него дополнительно введен оптимальный линейный фильтр, причем для обеспечения стабилизации в двух вертикальных плоскостях ось гироскопа расположена вертикально, а массивный обод ротора гироскопа помещен в упорный горизонтальный подшипниковый узел, расположенный в вертикальной раме симметрично относительно центральной поперечной горизонтальной оси устройства, воспринимающий вертикальные нагрузки и исключающий деформации ротора и оси гироскопа и возникающие вследствие этого прецессии, влияющие на точность и скорость стабилизации объекта, а сигнал с выхода оптимального линейного фильтра и сигнал коррекции суммируются и подаются на прецессионный двигатель вертикальной рамы гироскопа, парирующий, совместно с двигателем стабилизации горизонтальной рамы, вынужденной прецессией возможные значительные отклонения стабилизированной платформы от горизонтального положения под действием внешних сил.
Новые существенные признаки:
1. Для обеспечения стабилизации объекта в двух вертикальных плоскостях ось гироскопа расположена вертикально.
2. Массивный обод ротора помещен в упорный подшипниковый узел, исключающий деформации ротора и оси гироскопа и возможные прецессии, вызванные деформациями и влияющие на точность стабилизации объекта.
3. Подшипниковый узел расположен на вертикальной раме симметрично относительно центральной поперечной горизонтальной оси устройства.
4. Горизонтальный подшипниковый узел воспринимает вертикальные нагрузки от ротора гироскопа.
5. Значительные отклонения от горизонтального положения стабилизируемой платформы парируются прецессионным двигателем вертикальной рамы совместно с двигателем стабилизации горизонтальной рамы.
Перечисленная совокупность признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Технический результат обеспечивается наличием в устройстве упорного подшипникового узла - опоры массивного обода ротора, исключающего деформации оси и ротора гироскопа и возможные прецессии, вызванные деформациями, влияющие на точность стабилизации объекта, а значительные отклонения от горизонтального положения стабилизируемой платформы парируются прецессионным двигателем горизонтальной рамы, совместно с двигателем стабилизации горизонтальной рамы.
В устройствах, использующих стабилизирующие свойства гироскопа, ротор которого благодаря вращению с большой угловой скоростью создает кинетический момент, необходимый для сохранения неизменного положения главной оси гироскопа в инерциальном пространстве, угловые скорости отклонения главной оси гироскопа в инерциальном пространстве определяются значением кинетического момента гироскопа: чем больше кинетический момент J·Ω, тем меньше угловые скорости дрейфа оси гироскопа, тем выше точность работы устройства. Но одновременно с увеличением кинетического момента, растут моменты внешних возмущающих сил. Для определения требований к конструкции ротора необходимо выяснить силы, создающие возмущающие моменты относительно осей подвеса гироскопа. Для этого рассмотрим ротор, состоящий из массивного обода и гибкого вала, соединенных между собой тонкой диафрагмой. Будем полагать этот ротор идеально сбалансированным (Фиг.1А).
При равномерном движения объекта со скоростью V его ускорение равно нулю; V'=0, а центр OP массы mP ротора совмещен с точкой О подвеса гироскопа (Фиг.1А). При ускорениях совмещение точек OP и О будет нарушаться, в связи с чем на гироскоп начнут воздействовать моменты возмущающих сил, вызывающие отклонения его от первоначального направления. В результате ускорений вдоль осей Х и Z (Фиг.1Б и 1В) возникнут силы инерции:

которые вызовут деформации диафрагмы и вала ротора. В результате центр Ор массы mp ротора сместится относительно точки подвеса О на расстояния Х и Z. Амплитуды деформаций зависят от осевой cX и радиальной cZ жесткостей диафрагмы и вала гироскопа и определяются из условий равенства упругих и инерциальных сил по координатным осям:

В общем случае (Фиг.1Г) силы инерции RX и RZ создадут относительно оси OY, проходящей через точку О подвеса, возмущающий момент:

который вызовет прецессию гироскопа относительно осей подвеса ротора. Угловая скорость прецессии вокруг вертикальной оси подвеса Z равна:

Равнодействующая сил инерции RX и RZ, направленная по оси О-OP, будет создавать на опоры, установленные на оси Y, силовое воздействие:

создавая в подшипниках момент сил трения:

под влиянием которого у гироскопа тоже начнется прецессионное движение, угловая скорость которого определяется равенством:

где λ - коэффициент момента сил трения.
Отсюда: для повышения характеристик гироскопического успокоителя необходимо уменьшить угловые скорости прецессионного движения.
Для выяснения влияния конструктивных параметров гироскопа на произведение угловых скоростей прецессии обратимся к произведению (4) и (7):

Заменив массу ротора его весом получим:

Анализ полученного равенства показывает, что ускорения стабилизируемого объекта, ускорение силы тяжести и коэффициент момента сил трения в опорах подвеса не зависят от параметров ротора гироскопа. Для оценки рациональности конструктивного исполнения ротора гироскопа рассмотрим произведение второго и третьего сомножителей выражения (9), обозначив его как коэффициент K, характеризующий работоспособность конструкции:

который должен стремиться к нулю
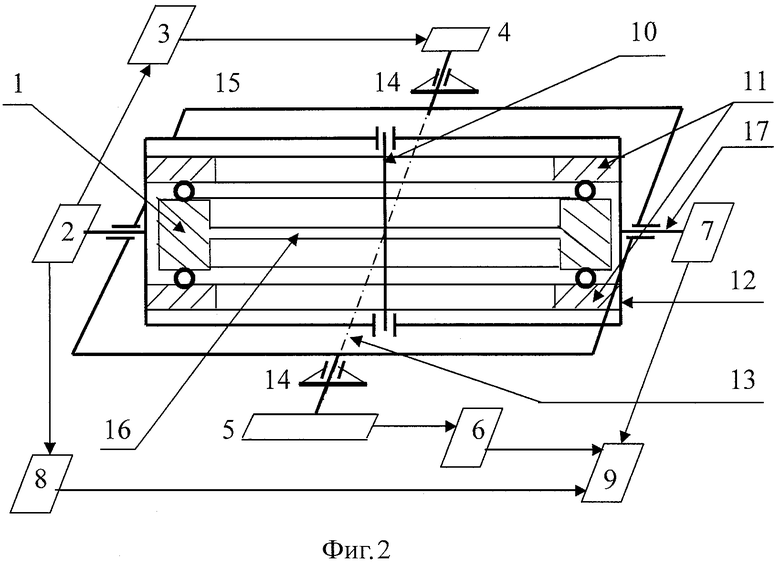
Исходя из значения коэффициента работоспособности гироскопического успокоителя (10) для получения рациональной конструкции необходимо, чтобы кинетический момент гироскопа J·Ω принимал как можно большие значения, а разность жесткостей ротора в осевом сх и радиальном cz направлениях стремилась к нулю. Повышения кинематического момента гироскопа можно добиться, увеличив число оборотов ротора и сосредоточив большую часть массы гироскопа в его ободе большого диаметра (позиция 1, Фиг.2), разместив его на сравнительно тонкой диафрагме (16), а для исключения деформаций диафрагмы (16) и оси (10) гироскопа опереть массивный обод гироскопа (1) на упорный подшипник (11), размещенный в вертикальной раме (12) и парирующий осевые и отчасти радиальные деформации, в результате чего жесткость опор ротора в осевом cX и радиальном cZ направлениях будет примерно одинаковой, а их разность будет стремиться к 0. Система стабилизации гироскопической платформы представляет собой последовательно соединенные датчик угла прецессии (2) вертикальной рамы гироскопа (12), усилитель-преобразователь (3) и стабилизирующий двигатель (4) горизонтальной рамы гироскопа (15), закрепленной на центральной продольной горизонтальной оси (13), покоящейся в подшипниках (14) гиростабилизированной платформы. Система коррекции состоит из двух цепей: последовательно соединенных акселерометра (5) и усилителя коррекции (6) и последовательно соединенных датчика угла прецессии (2) и оптимального линейного фильтра. Сигналы с выхода усилителя коррекции (6) и оптимального линейного фильтра (8) суммируются сумматором (9) и поступают на прецессионный электродвигатель (7) вертикальной рамы гироскопа (12) на центральную поперечную горизонтальную ось (17), парируя, совместно с двигателем стабилизации (4), значительные отклонения от горизонтального положения стабилизируемой платформы.
Перечень позиций на чертеже Фиг.1 к заявке
ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР
VX'; VZ' - осевое и радиальное ускорения;
RX; RZ - осевая и радиальная силы инерции;
Х; Z - осевое и радиальное перемещения центра массы OP гироскопа от точки подвеса О.
Перечень позиций на чертеже Фиг.2 к заявке
ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР
1. Гироскоп.
2. Датчик угла прецессии вертикальной рамы гироскопа.
3. Усилитель стабилизации.
4. Двигатель стабилизации.
5. Акселерометр горизонтальной рамы гироскопа.
6. Усилитель коррекции.
7. Двигатель стабилизации горизонтальной рамы.
8. Оптимальный линейный фильтр.
9. Сумматор.
10. Вертикальная ось гироскопа.
11. Упорный горизонтальный подшипниковый узел.
12. Вертикальная рама.
13. Центральная продольная горизонтальная ось.
14. Стойки стабилизированной платформы объекта.
15. Горизонтальная рама.
16. Диафрагма.
17. Центральная поперечная горизонтальная ось.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| Способ повышения устойчивости гиростабилизатора | 2022 |
|
RU2783728C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |

Изобретение относится к области приборостроения и может быть использовано для подавления колебаний в системах, объекты которых содержат одно или несколько колебательных звеньев. Технический результат - расширение функциональных возможностей. Для достижения данного результата в устройствах, использующих стабилизирующие свойства гироскопа, ротор которого благодаря вращению с большой угловой скоростью создает кинетический момент, необходимый для сохранения неизменного положения главной оси гироскопа в инерциальном пространстве. Угловые скорости отклонения главной оси гироскопа в инерциальном пространстве определяются значением кинетического момента гироскопа. Увеличивают число оборотов ротора и сосредотачивают большую часть массы гироскопа в его ободе большого диаметра, размещая его на сравнительно тонкой диафрагме. Для исключения деформаций диафрагмы и вала гироскопа опору массивного обода гироскопа выполняют на упорном подшипнике, который компенсирует осевые и отчасти радиальные деформации. 2 ил.
Одноосный силовой гиростабилизатор, содержащий двухстепенной гироскоп с датчиком угла прецессии, выход которого через усилитель стабилизации соединен с двигателем стабилизации, последовательно соединенные акселерометр и усилитель коррекции, с целью повышения точности в него дополнительно введен оптимальный линейный фильтр, отличающийся тем, что для обеспечения стабилизации в двух вертикальных плоскостях ось гироскопа расположена вертикально, а массивный обод ротора гироскопа помещен в упорный горизонтальный подшипниковый узел, расположенный в вертикальной раме симметрично относительно центральной поперечной горизонтальной оси устройства, воспринимающий вертикальные нагрузки и исключающий деформации ротора и оси гироскопа и возникающие вследствие этого прецессии, влияющие на точность и скорость стабилизации объекта, а сигнал с выхода оптимального линейного фильтра и сигнал коррекции суммируются и подаются на прецессионный двигатель вертикальной рамы гироскопа, парирующий совместно с двигателем стабилизации горизонтальной рамы вынужденной прецессией возможные значительные отклонения стабилизированной платформы от горизонтального положения под действием внешних сил.
| Одноосный гиростабилизатор | 1990 |
|
SU1779930A1 |
| Одноосный силовой горизонтальный гиростабилизатор | 1979 |
|
SU790923A1 |
| ДВУХОСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 0 |
|
SU295976A1 |
| КАЛИХМАН Д.М | |||
| Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов | |||
| - Саратов: Изд.-во Сарат | |||
| Гос | |||
| Техн | |||
| Университета, 2001, с.336 | |||
| КАЛИХМАН Д.М | |||
| Одноосное управляемое основание с датчиком угловой | |||

