Изобретение относится к области приборостроения и может быть использовано при создании инерциальных навигационных систем (ИНС) и инерциальных систем управления (ИСУ) для определения навигационных параметров подвижных объектов.
В настоящее время известны способы определения уходов гиростабилизированной платформы (ГСП), которые предполагают измерение только собственной скорости прецессии (ССП) при определенных условиях (У.Ригли, У.Холлистер, У.Денхард «Теория, проектирование и испытания гироскопов», М.: Мир, 1972 г., стр.357-386). Среди них можно выделить три основных способа:
- измерение ССП в режиме свободного гироскопа на гиростабилизаторе (ГС);
- измерение ССП в режиме датчика угловой скорости (ДУС) на ГС;
- измерение ССП на ГС, включенном в режим электрической пружины.
Для реализации данных методов определения скорости инструментального ухода не требуются дополнительные устройства и специальные алгоритмы обработки информации.
Принцип определения ССП по первому способу заключается в том, что в режиме свободного гироскопа скорость разворота платформы ГС равна скорости прецессии гироскопа. Поэтому, измеряя угловое положение платформы и ее угловую скорость, определяют скорость прецессии гироскопа.
Второй способ предполагает включение гироскопа в режим ДУС и определение скорости прецессии по сигналу, снимаемому с датчика момента (ДМ) гироскопа (выходное напряжение ДМ будет пропорционально измеряемой скорости прецессии).
При определении инструментального ухода гироскопа по третьему способу в режиме свободного гироскопа сигнал с датчика угла (ДУ) поворота ротора вокруг оси платформы после преобразования подается на двигатель разгрузки ГС, что вызывает угловое отклонение платформы. Этот угол регистрируется ДУ платформы и после преобразования подается на ДМ гироскопа по той же оси. По выходному напряжению ДМ гироскопа судят о ССП.
Недостатком вышеперечисленных способов является их неавтономность за счет необходимости использования режима свободного гироскопа и применения специальных условий измерений, предполагающих их проведение на специальных фундаментах, исключающих угловые колебания основания. Также эти способы не предусматривают определение суммарного ухода и его компенсацию.
Такого рода недостатки устраняются в способе определения и компенсации ухода ГС, описанном в патенте №2060463, в котором динамический и инструментальный уходы ГС определяются по сигналам, пропорциональным углам прецессии. Суть способа заключается в том, что вокруг осей стабилизации создают дополнительные моменты сил вязкого трения, в установившемся режиме (по окончании переходных процессов в системе) фиксируют значения углов прецессии, выделяют систематические и периодические составляющие сигналов, по которым рассчитываются скорости инструментального и динамического ухода соответственно. Эти значения суммируются, а затем суммарный уход компенсируется путем учета в алгоритме навигации либо подачей сигнала на датчик момента гироблока (ДМ ГБ). Таким образом, данный способ позволяет непрерывно определять текущие уходы ГСП и учитывать изменения возмущающих моментов по осям прецессии гироскопов. Основные трудности при реализации этого способа заключаются в выделении компоненты угла прецессии, содержащей информацию о возмущающих моментах, действующих по оси прецессии, поскольку ее величина довольно мала по сравнению с другой компонентой, характеризуемой возмущающими моментами вдоль оси стабилизации.
Выделение малой компоненты угла прецессии, определяющей ССП, возможно при определенных условиях измерения угла прецессии, когда вокруг оси стабилизации вводится дополнительное демпфирование, что позволяет сделать компоненты угла прецессии практически соизмеримыми. Точность определения уходов будет зависеть от условий измерения и алгоритма обработки информации.
Задачей настоящего изобретения является повышение точности определения инструментальных уходов ГСП.
В предлагаемом изобретении это достигается:
- за счет создания вычислительного устройства (ВУ) для регулировки параметров системы и повышения точности измерения, позволяющего исключить погрешности гироблоков;
- за счет совместной обработки информации, полученной с помощью математической модели ГС и непосредственно от самой ГСП.
Для этого применяется адаптивный алгоритм определения уходов, использующий комплексную обработку информации, полученную с помощью математической модели ГС и непосредственно от комплекса командных приборов (ККП), состоящего из ГСП, на которой установлены ГБ и акселерометр, датчика момента (ДМ) и датчика угла (ДУ) платформы, установленных на оси платформы, а также датчика угловой скорости (ДУС), установленного на корпусе объекта. При этом ССП рассчитывается по выходным данным математической модели ГС, которая корректируется по информации, поступающей непосредственно от ГС. Использование математической модели ГС в вычислениях текущего значения ухода позволяет сгладить остаточные шумовые составляющие, присутствующие в гиросистеме, тем самым повысив точность определения ССП. Это достигается за счет использования в алгоритме системы определения уходов (СОУ) двух фильтров (в отличие от предыдущей схемы с одним низкочастотным фильтром), один из которых осуществляет предварительную фильтрацию помех (на выходе измерительных устройств датчиков), а другой производит подстройку математической модели ГС по текущим измерениям посредством определения ошибок рассогласования реальной гиросистемы и ее модели.
Данный способ определения и компенсации текущего ухода ГСП заключается в том, что в режиме измерений по сигналу блока управления ВУ увеличивают демпфирование по оси стабилизации, отключают цепь интегральной коррекции на время измерения углов прецессии, уменьшают коэффициент разгрузки, в установившемся режиме фиксируют значения углов прецессии, выделяют составляющую углов прецессии, зависящую от моментов, действующих по оси прецессии, комплексируют информацию, поступающую с датчиков углов прецессии (ДУП) и полученную на основании математической модели ГС, по этой информации рассчитывают инструментальный уход ГСП. Скорость инструментального ухода суммируется со скоростью динамического ухода, определяемого способом, описанным в патенте №2060463. Затем суммарный уход компенсируется путем учета в алгоритме определения навигационных параметров или при расчете вектора кажущейся скорости (ВКС). Либо по информации о текущем уходе ГСП рассчитывают возмущающие моменты, действующие вокруг осей прецессии и вызывающие уходы ГСП, и компенсация ухода происходит путем подачи сигнала, пропорционального этим возмущающим моментам, на ДМГБ.
Для выделения достаточно малой компоненты угла прецессии, определяющей ССП, необходимо в режиме измерения угла прецессии изменить некоторые параметры ГС. Поскольку внешние возмущения, действующие на него, могут носить случайный характер, т.е. представлять собой некий шум, то сигнал угла прецессии может содержать помехи, наводимые шумами, действующими на ГС и присутствующими в измерительном устройстве. Сигнал угла прецессии подлежит предварительной фильтрации, но при последующем разделении его компонент остаточные шумовые составляющие могут погасить полезный сигнал, содержащий информацию о ССП, если величина помехи во много раз превосходит этот сигнал. Для того чтобы на уровне шума малая компонента угла прецессии была идентифицируема, необходимо увеличить ее значение за счет изменения некоторых параметров ГС, а именно за счет демпфирования по оси стабилизации и коэффициента разгрузки. Увеличение этой составляющей ограничивается техническими возможностями изменения данных параметров, а также их предельно допустимыми значениями, в рамках которых соблюдаются необходимые условия устойчивости работы ГС, и обеспечивается требуемое качество переходных процессов. В этом случае идентификация сигнала с требуемой точностью осуществляется за счет соответствующего выбора параметров фильтров и алгоритмов фильтрации.
В данном техническом решении состав сигнала с датчика угла прецессии (ДУП) изменяется за счет увеличения коэффициента демпфирования по оси стабилизации путем включения дополнительных обмоток в ДМ либо за счет подключения дополнительных демпферов по оси стабилизации, а также за счет уменьшения коэффициента разгрузки.
Ниже представлены формульные зависимости, лежащие в основе определения ССП:
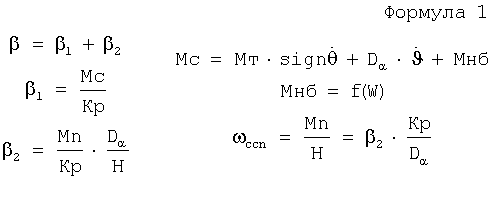
β - угол прецессии;
β1 - составляющая угла прецессии, зависящая от моментов, действующих по оси стабилизации;
β2 - составляющая угла прецессии, зависящая от моментов, действующих по оси прецессии;
Мс - внешний момент, действующий вдоль оси стабилизации;
Мт - момент трения;
Mn - внешний момент, действующий вдоль оси прецессии;
Мнб - момент небаланса;
Кр - коэффициент разгрузки;
Dα - коэффициент демпфирования по оси стабилизации;
Н - кинетический момент гироскопа;
ωссп - собственная скорость прецессии;
 - угловая скорость движения основания;
- угловая скорость движения основания;
 - угловая скорость рам карданова подвеса;
- угловая скорость рам карданова подвеса;
W - ускорение объекта;
Следует отметить, что большое влияние на точность определения уходов и на всю работу системы в целом оказывают резонансные явления, которые надо учитывать при проектировании системы и выборе условий измерения и типа измерительного оборудования. Подобных явлений следует избегать, не допуская совпадения частоты помехи с собственной частотой объекта и частотой нутации, поскольку при работе на частотах, близких к резонансным, погрешность определения уходов возрастает в 10 раз, и выбранные параметры систем разгрузки, управления и обработки информации (в частности, фильтра) не обеспечивают требуемое качество переходных процессов вплоть до полной потери системой устойчивости.
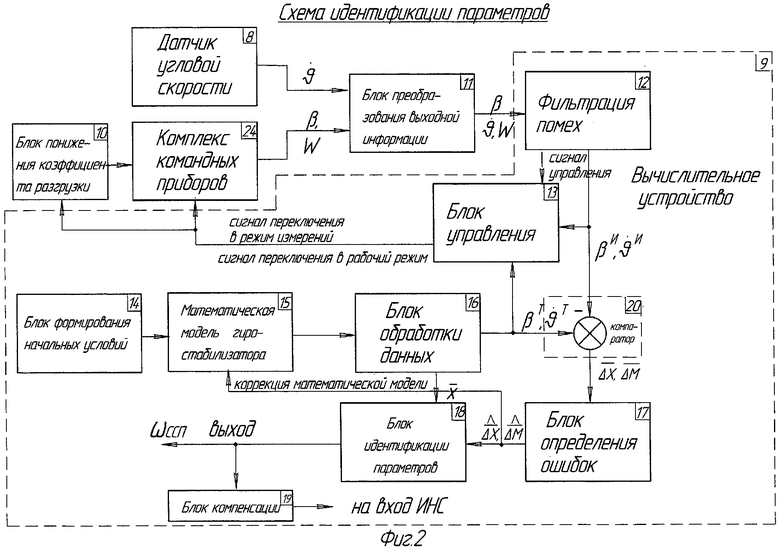
На фиг.1 представлена схема коммутации одного из каналов СОУ. Она состоит из ККП (24), вычислительного устройства (9), вырабатывающего управляющие сигналы для переключения режимов работы и обрабатывающего показания измерений, а также ДУС (8), установленного на корпусе объекта. ККП (24) содержит ГСП (1) с установленными на ней ГБ (2) и акселерометром (5), ДМ (6) платформы и ДУ (7) платформы, установленных на оси платформы, блок интегральной коррекции (21), усилитель (22) и компаратор (23). ГБ (2) содержит датчик момента (4) и ДУП (3), также в схеме имеются блок понижения коэффициента разгрузки (10) и блок преобразования выходной информации (11).
С ДУП (3) в вычислительное устройство (9) постоянно поступает сигнал, на основании которого определяется момент наступления установившегося режима. Вычислительное устройство (9), в зависимости от режима работы и состояния системы, формирует управляющий сигнал, на основании которого СОУ переходит в режим измерений. Управляющий сигнал отключает интегральную коррекцию (ключ К2 разомкнут) для исключения астатизма в системе и возможности идентификации сигнала (в режиме интегральной коррекции 
получение информации об угле прецессии и определение ухода ГС становится невозможным) и включает дополнительные обмотки в ДМ (6) (ключ К1 замкнут) для повышения коэффициента демпфирования по оси стабилизации (ось У), а также подает сигнал в блок понижения коэффициента разгрузки (10). Управляющий сигнал формируется блоком управления ВУ (фиг.2) в зависимости от его режима работы. Если режим работы автономный, то осуществляется непрерывное определение и компенсация ухода ГСП (1) по заранее запрограммированному алгоритму. Если режим работы неавтономный (режим управления), то в ВУ (9) поступает сигнал управления, на основании которого ВУ (9) формирует сигнал переключения системы из рабочего режима в режим измерений.
Рабочий режим - стандартный режим работы ГС и СОУ, заключающийся в стабилизации гироплатформы. Режим измерений - режим работы СОУ, заключающийся в измерении угла прецессии, определении ухода ГСП и его компенсации, а также в стабилизации гироплатформы, но без интегральной коррекции и с измененными параметрами системы разгрузки.
В режиме измерения угла прецессии при изменении параметров системы по сигналу ВУ (9) начинает работать алгоритм идентификации параметров и вычисления ССП. Т.е. к обработке показаний измерений угла прецессии подключается математическая модель ГС. При этом в вычислительное устройство поступает информация от ДУС (8) и акселерометра (5).
При переходе системы к неустановившемуся состоянию по сигналу управления происходит переключение в рабочий режим. При этом отключаются дополнительные обмотки ДМ (6) (ключ К1 разомкнут) и включается интегральная коррекция (21) (ключ К2 замкнут), в блок понижения коэффициента разгрузки (10) сигнал не подается и ГС работает в обычном режиме.
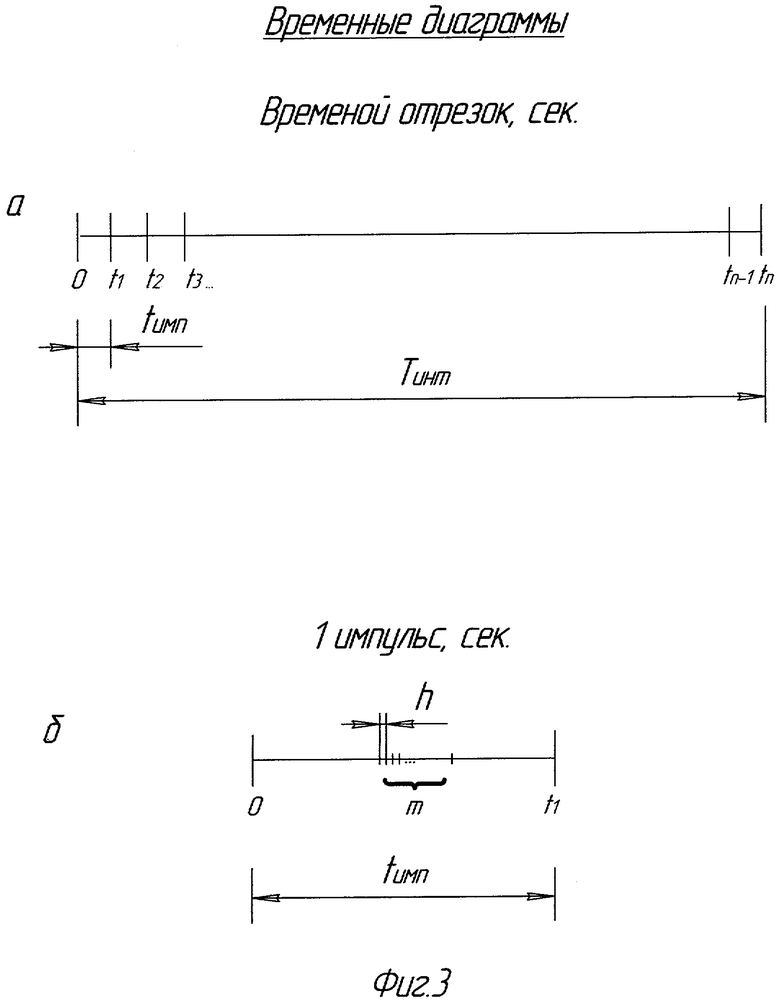
На фиг.2 представлена схема идентификации параметров. Она состоит из следующих блоков: ККП (24), ДУС (8), ВУ (9:12-20), блок понижения коэффициента разгрузки (10), блок преобразования выходной информации (11), фильтрация помех (12), блок управления (13), блок формирования начальных условий (14), математическая модель ГС (15), блок обработки данных (16), блок определения ошибок (17), блок идентификации параметров (18), блок компенсации (19), компаратор (20).
Начальными условиями блока 24 являются параметры ГС с системой разгрузки, на который действуют внешние возмущения. Для измерения угловой скорости движения основания имеется ДУС (8). Для преобразования выходной информации блоков 24 и 8 служит блок 11. В блоке 9 осуществляется реализация математической модели ГС (15) и обработка ее выходных параметров, а также расчет сигналов компенсации и управления. Выходные сигналы блока 11 поступают на вход фильтра (12), где проходят предварительную фильтрацию. В блоке 15 заложена математическая модель ГС, на вход которой поступают начальные условия и модель возмущений. В качестве начальных условий выступают параметры реальной модели. Модель возмущений описывает внешние воздействия на систему. В блоке 16 происходит обработка выходных данных математической модели. Он представляет собой теоретическое измерительное устройство. Для переключения режимов работы системы служит блок управления. Он формирует сигнал переключения СОУ в режим измерений на основании информации о завершении переходных процессов в системе и в зависимости от режима работы ВУ, а также сигнал переключения СОУ обратно в рабочий режим (по счетчику времени). Для этого в блок управления непрерывно поступают сигналы с блоков 12 и 16. Также блок управления (13) запускает алгоритм идентификации параметров в режиме измерения. При этом выходные сигналы блока 16 и фильтра (12) поступают на компаратор (20), где они сравниваются. Выход компаратора (20) представляет собой разность теоретически рассчитанного и измеренного значений угла прецессии β и угловой скорости движения основания  , т.е. ошибки
, т.е. ошибки  и
и  , где
, где
 ,
,  - теоретически рассчитанные значения угла прецессии и угловой скорости движения основания;
- теоретически рассчитанные значения угла прецессии и угловой скорости движения основания;
 ,
,  - измеренные значения угла прецессии и угловой скорости движения основания.
- измеренные значения угла прецессии и угловой скорости движения основания.
Эти ошибки поступают в блок 17, в котором реализуется алгоритм определения ошибок. Алгоритм может быть построен на основе фильтра Калмана. Оценки  и
и  , полученные с помощью фильтра, а также вектор состояния
, полученные с помощью фильтра, а также вектор состояния  , рассчитанный в блоке 16, поступают в блок 18 в качестве начальных условий алгоритма идентификации параметров. В этом алгоритме вычисляется точное значение угла прецессии
, рассчитанный в блоке 16, поступают в блок 18 в качестве начальных условий алгоритма идентификации параметров. В этом алгоритме вычисляется точное значение угла прецессии

и угловой скорости движения основания

Происходит разделение компонент β1 и β2:

и определяется значение ССП:
Требуемое значение ССП снимается с выхода блока 18. Оценки и , полученные в блоке 17, также поступают в блок 15 для коррекции математической модели ГС (15). Значение инструментального ухода с выхода блока 18 подается на вход блока 19, где оно складывается со значением динамического ухода. Полученный суммарный сигнал подается на вход ИНС для компенсации текущего ухода.
Математическая модель ГС (15), реализованная в блоке 15, построена на базе полных уравнений движения ГС, записанных в переменных состояния. Эти уравнения могут быть решены методами Рунге-Кутта и Эйлера в зависимости от параметров ГС, от параметров движения объекта, на котором он установлен, а также от характера внешних возмущений, действующих на данный ГС. Число переменных состояния зависит от вида уравнений, используемых в математической модели.
Алгоритм работы СОУ согласно схеме на фиг.2 следующий: в рабочем режиме с ДУП ГС в вычислительное устройство поступает информация об угле прецессии, эти показания отфильтровываются и, наряду с теоретически рассчитанным значением, поступают в блок управления. Блок управления, в свою очередь, на основании этих показаний, а также в зависимости от режима работы ВУ формирует и подает на ГС сигнал переключения из рабочего режима в режим измерений. Если ВУ работает в автономном режиме, то блок управления формирует сигнал переключения по заранее запрограммированному алгоритму, при этом значение ССП определяется для каждого импульса. При работе ВУ в неавтономном режиме (или режиме управления) блок управления вырабатывает сигнал в зависимости от сигнала управления и значение ухода известно только в момент подачи управляющего сигнала. В режиме измерения по сигналу блока управления запускается алгоритм идентификации параметров и определения ССП. Теоретически рассчитанные и непосредственно измеренные параметры сравниваются компаратором, и разность значений поступает в блок 17 для определения ошибок, на основании которых корректируется математическая модель ГС, и вычисляются точные значения параметров. В блоке 18 на основании вышеполученной информации определяется значение инструментального ухода, оно подается в блок 19, где суммируется с динамическим уходом. По текущему значению уходов рассчитываются корректирующие моменты, подаваемые на ДМ ГБ:

Мкомп - момент компенсации;
 - инструментальный уход;
- инструментальный уход;
 - динамический уход;
- динамический уход;
ωдр - суммарный уход (дрейф);
Н - кинетический момент гироскопа.
Компенсация также может осуществляться алгоритмически путем учета текущих уходов в алгоритме определения навигационных параметров.
При переходе системы к неустановившемуся состоянию по сигналу управления происходит переключение в рабочий режим.
Число подобных переключений определяется количеством импульсов на определенном временном отрезке. Оно в свою очередь зависит от характера движения объекта, на котором установлена гиросистема, и, в частности, от частоты объекта. Т.о., число измерений на некоем временном интервале будет определяться количеством импульсов и количеством измерений в каждом импульсе, что также зависит от частоты объекта.
Наглядно это можно проиллюстрировать на временных диаграммах (см. фиг.3а, 3б).
Тинт - длительность временного интервала;
Тимп - длительность импульса;
n - число импульсов на временном отрезке;
m - число измерений в одном импульсе;
h - шаг дискретизации;
k=m·n, где k - число измерений на всем временном отрезке Тинт,
k=f(h, m, n, fob).
Длительность режима измерений будет зависеть от принципа обработки информации, который определяется характером движения объекта. Если характер движения объекта высокочастотный, то обработка информации производится с точки зрения допустимого значения измеряемого параметра в виду высокой динамики его поведения. Т.е. время переключения системы в рабочий режим будет определяться моментом перехода системы в неустановившееся состояние, когда значения измеряемых параметров выходят за рамки допустимых. При низкочастотном характере движения объекта, когда динамика измеряемых параметров более низкая, обработка информации ведется по принципу набора достаточного количества измерений в каждом импульсе для получения оптимального числа измерений на всем временном отрезке. Т.о., критерием для перехода системы в рабочий режим будет служить момент набора достаточного числа измерений.
Предлагаемый способ определения и компенсации текущего ухода ГСП может быть реализован с помощью цифрового ВУ. Оно может осуществлять функции переключения системы в режим измерений и изменения ее параметров в этом режиме, т.е. осуществлять отключение интегральной коррекции, изменение демпфирования и коэффициента разгрузки, а также осуществлять функции фильтрации сигналов с ДУП, ДУС и акселерометра, вычисление точного значения угла прецессии, разделение его компонент и вычисление инструментального и динамического ухода, расчет возмущающих моментов, действующих вокруг осей прецессии ГБ, экстраполяцию инструментального ухода и суммирование его с динамическим уходом. ВУ должно иметь связь с ДУП ГБ, с ДМ платформы, с ДУС и акселерометром, а также с ДМ ГБ или с бортовой цифровой вычислительной машиной (БЦВМ), в которой заложен алгоритм навигации. Размещение алгоритмов ВУ в БЦВМ нецелесообразно в силу ее перегруженности и специфики решаемой задачи. Эта специфика связана с необходимостью учета высокочастотных периодических движений ГС, пренебречь которыми нельзя во избежание утраты адекватности математической модели ГС физическим процессам, протекающим в нем.
Конкретный вид математических выражений, описывающих работу алгоритма, зависит от особенностей кинематической схемы ГС, величины и соотношения параметров, определяющих его динамические свойства (моментов инерции, коэффициентов демпфирования, коэффициентов разгрузки, параметров корректирующих звеньев).
Использование предлагаемого способа определения и компенсации ухода ГСП позволяет повысить точность ИНС за счет возможности компенсации текущего значения ухода во время движения, т.е. компенсации помимо предсказанной ранее систематической составляющей ухода гироскопов составляющей, которая определяет нестабильность ухода. При этом требования к стабильности постоянных уходов гироскопов могут быть снижены, поскольку данный метод предполагает определение текущего ухода.
Использование эффекта автономного определения ухода ГСП дает возможность снизить требования к чувствительным элементам (ЧЭ) ГС по точности и технологии изготовления, уменьшить его габаритно-массовые характеристики, что позволяет создавать относительно недорогие ИНС среднего класса точности. При этом требуемая точность определения навигационных параметров может быть достигнута за счет компенсации текущего ухода ГСП.
Также предлагаемый способ определения и компенсации текущего ухода ГСП можно использовать исключительно для повышения точности ИНС, не упрощая при этом элементную базу. При этом основное внимание предполагается уделять повышению точностных характеристик системы, вплоть до достижения абсолютной точности, что особенно актуально для морских систем навигации, где не предъявляются большие требования по габаритно-массовым характеристикам, а по точности требования высокие, поскольку это системы длительного действия.
Использование методики определения и компенсации текущих уходов ГСП позволяет повысить степень сходимости ошибок по дрейфу за счет того, что они являются практически непосредственно измеряемыми компонентами, которые, как известно, сходятся в первую очередь. Это дает большое преимущество с точки зрения наблюдаемости ошибок ИНС, а именно - скорости сходимости этих ошибок, поскольку ошибки по дрейфу, определяемые в результате решения уравнений ошибок, сходятся в последнюю очередь.
Данный метод построения системы навигации позволяет сократить время предстартовой подготовки за счет автономной калибровки непосредственно во время движения (что является большим преимуществом для систем аналитического типа), а также повысить точность управления ГСП и, следовательно, точность ее выставки за счет компенсации текущего ухода. Это позволяет уменьшить погрешности ориентации платформы, что полезно для любого типа систем, и, в частности, повысить точность построения вертикали в навигации, что немаловажно для задач гравиметрии.
Точность СОУ зависит от ряда факторов, вызывающих погрешности при определении ухода. Среди основных погрешностей можно выделить:
1) Входные погрешности, к которым относятся шумы, присутствующие в системе. Они являются причиной погрешностей в измерении параметров. Для уменьшения этих погрешностей необходимо оптимальным образом проектировать систему, подбирая ее параметры так, чтобы по возможности избегать шумовых явлений. Также необходимо тщательно выбирать условия измерения и тип измерительного оборудования.
2) Погрешности алгоритма:
- в первую очередь это несоответствие математической модели ГС и реальной гиросистемы, в частности ошибки в описании модели возмущений и параметров движения объекта. С целью уменьшения данного вида погрешностей в алгоритме предусматривается коррекция математической модели ГС по текущим измерениям;
- могут возникнуть ошибки определения параметров в момент переключения системы из одного режима в другой, но при особом принципе построения алгоритма определения ошибок этих погрешностей можно избежать;
- погрешности аппроксимации могут быть снижены при определенном выборе параметров фильтров;
- погрешности, обусловленные неучетом перекрестных связей. Они являются величинами второго порядка малости по сравнению с другими погрешностями, и ими можно пренебречь либо отнести к динамическому уходу.
Во избежание больших погрешностей фильтрации и измерения параметров необходимо стремиться к высокой стабильности частоты вращения ротора. Также следует предъявить повышенные требования к стабильности нулевого сигнала ДУ гироскопа по оси прецессии, т.к. информация от него используется при расчете ССП.
Для сглаживания влияния погрешностей и повышения точностных характеристик навигационной системы, применяемой в комплексе с СОУ, ее можно интегрировать со спутниковой системой навигации.
Устройство для определения и компенсации ухода ГСП содержит ККП, состоящий из ГСП с установленными на ней ГБ и акселерометром, датчика момента (ДМ) платформы и датчика угла (ДУ) платформы, установленных на оси платформы, усилителя, компаратора и блока интегральной коррекции, а также датчик угловой скорости (ДУС), установленный на корпусе объекта, и ВУ, в котором происходит обработка информации, определение скорости прецессии, а также расчет суммарного ухода и его компенсация либо в навигационном алгоритме, либо с помощью управляющих сигналов, подаваемых на ДМ ГБ. Данное устройство (фиг.1) позволяет определить уход ГСП по одному каналу, т.к. оно построено на базе ОГС (с целью упрощения конструкции для облегчения понимания процессов, протекающих в системе, и принципа ее работы). Принцип работы СОУ по двум другим каналам аналогичен. Для получения полной информации об уходах ГСП по всем трем направлениям и использовании ее в алгоритмах навигации и управления подвижными объектами необходимо строить СОУ на базе трехосного гиростабилизатора (ТГС) и комплексировать ее с ИНС. При этом алгоритм определения навигационных параметров и алгоритм идентификации параметров СОУ предполагается реализовывать в разных вычислителях, поскольку эти алгоритмы предназначены для решения разных задач и их размещение в одном вычислителе нецелесообразно в силу специфики данных задач. В частности, это связано с необходимостью учета высокочастотных периодических движений ГС, пренебречь которыми нельзя в силу утраты адекватности математической модели ГС физическим процессам, протекающим в нем.
В данном случае устройство для определения текущих уходов ГСП будет состоять из: ТГС, в состав которого входят три двухстепенных или два трехстепенных ГБ и три акселерометра, а также трех ДУС и ВУ. В ГС вместо дополнительных демпферов по оси стабилизации может быть использован специальный ДМ с регулируемым коэффициентом демпфирования.
ГС управляется ВУ по сигналам блока управления, который формирует сигнал переключения СОУ в режим измерений на основании информации о завершении переходных процессов в системе и в зависимости от режима работы ВУ, а также сигнал переключения системы обратно в рабочий режим (по счетчику времени). Если ВУ работает в автономном режиме, то блок управления формирует сигнал переключения по заранее запрограммированному алгоритму, при этом значение ССП определяется для каждого импульса. При работе ВУ в неавтономном режиме (или режиме управления) блок управления вырабатывает сигнал в зависимости от сигнала управления и значение ухода известно только в момент подачи управляющего сигнала. Полученное значение инструментального ухода поступает в блок компенсации, где оно складывается со значением динамического ухода. Суммарный уход может быть скомпенсирован вычислительно путем учета в навигационном алгоритме или физически путем расчета возмущающих моментов, действующих по оси прецессии, и подачи сигналов, пропорциональных им, на ДМ ГБ. Для этого СОУ должна быть сопряжена с ИНС, а ВУ должно иметь связь с ДУП ГБ, с ДМ платформы, с ДУС и акселерометрами, а также с ДМ ГБ или с БЦВМ, в которой заложен алгоритм навигации.
Предложенная группа изобретений относится к области приборостроения и может быть использована при создании инерциальных навигационных систем и инерциальных систем управления для определения навигационных параметров подвижных объектов. Задачей настоящих изобретений является повышение точности определения инструментальных уходов гиростабилизированных платформ. Устройство для определения и компенсации ухода гиростабилизированной платформы (ГСП) содержит комплекс командных приборов (ККП), состоящий из гиростабилизатора (ГС), одним из элементов которого является датчик угла прецессии (ДУП) гироблока (ГБ), акселерометров, установленных на ГСП, спецвычислитель. При этом устройство включает блок преобразования выходной информации, на корпусе объекта установлены датчики угловой скорости (ДУСы), а спецвычислитель выполнен в виде вычислительного устройства (ВУ), содержащего блоки фильтрации помех, формирования начальных условий, математической модели (ММ) ГС, обработки данных, управления, определения ошибок, идентификации параметров, компенсации и компаратор, соответствующим образом объединенные в единую электронную схему. Заявленное устройство реализует соответствующий способ определения и компенсации ухода гиростабилизированной платформы. 2 н. и 6 з.п. ф-лы, 3 ил.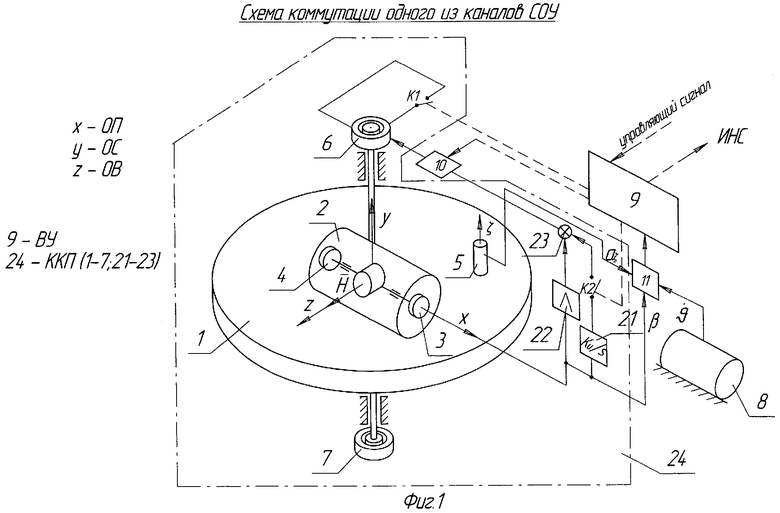
| RU 2060463 C1, 20.05.1996 | |||
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1988 |
|
RU2083954C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 1995 |
|
RU2107897C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| GB 1135117 A, 27.11.1968 | |||
| Устройство для сортировки дискообразных деталей | 1982 |
|
SU1079310A1 |
| US 4125799 A, 14.11.1978 | |||
| US 6421622 В1, 16.07.2002. | |||

