Изобретение относится к области приборостроения и может найти применение в системах определения их координат объектов с большой скоростью вращения по одной оси. Важной задачей при создании систем определения координат является создание точных малогабаритных гиростабилизаторов, работающих при больших угловых скоростях относительно одной из осей (например, для управляемых ракет (УР) и управляемых реактивных снарядов (УРС), при бурении скважин или других объектов).
Обычно для таких задач используется прибор на основе стабилизированной по крену корректируемой платформы (см., например, сборник докладов AIAA: J.Imbault, H.Tjnlin, A.Miniature Roll-Stabillized Inertial Measurement System AIAA, paper 86-2520, 1986 г.).
Данный прибор состоит из одноосного карданового подвеса, на стабилизируемой площадке, на которой установлены два ДНГ и три акселерометра. При этом один ДНГ работает в режиме двухосного датчика угловой скорости, а второй ДНГ является чувствительным элементом одноосного гиростабилизатора.
Данная схема построения командного прибора гармонично сочетает в себе достоинства кардановой гиростабилизированной платформы и бесплатформенного инерциального блока.
Аналогичная инерциальная платформа, но с цифровым регулятором, была разработана для японской ракеты М-3Н (см., например, М.Hgashigushi and H.Ishitani, Spin Free Analitic Platform Type Guidance and Control System, IFAC Automatic Control In Space, The Nertherland, 1982 г.), которая взята за прототип.
Одним из недостатков такой платформы является то, что в ней используются гироблоки, имеющие скорости уходов, пропорциональные первой и второй степени ускорения свободного падения (g и g2). С другой стороны используемые гироблоки и акселерометры практически не позволяют проводить измерения при больших диапазонах угловых скоростей и линейных ускорений. В то же время разработаны волоконно-оптические гироскопы (ВОГ) и микромеханические вибрационные гироскопы, которые не имеют уходов со скоростями, пропорциональными g и g2 (см., например, Pavlath G.A., Suman M.C., Fiberoptics Gyroscopes, Advances and Future Developments, Navigation, vol. 31, №2, Summer, 1984, p.70-82).
Однако, использование этих гироскопов в составе стабилизированной по крену корректируемой инерциальной платформы в режиме стабилизации сталкивается с определенными трудностями, а именно отсутствие возможности обеспечить работоспособность платформы в режиме приведения из-за отсутствия у них датчика момента.
Техническим результатом настоящего изобретения является повышение точности и обеспечение приведения стабилизированной по крену корректируемой инерциальной системы за счет исключения погрешностей, пропорциональных g и g2, и обеспечения режима коррекции и расширения диапазона измерения угловых скоростей и линейных ускорений.
Указанный технический результат достигается тем, что в способе стабилизации по крену инерциальной платформы для быстровращающихся объектов, включающем измерение линейных и угловых параметров объекта, определение углового положения платформы относительно корпуса объекта, вычисление значения и формирование сигналов управления поворотом и стабилизацией платформы и корректировку ее положения с помощью двигателя стабилизации, для измерения угловых скоростей по взаимно ортогональным координатным осям платформы используют волоконно-оптические или микромеханические вибрационные гироскопы, формируют сигнал корректирующей уставки по угловой скорости вокруг оси крена с учетом измеренных значений линейных ускорений по трем - и угловых скоростей по двум координатным осям платформы, не совпадающим с осью быстрого вращения объекта, а при формировании сигналов управления поворотом и стабилизацией платформы и корректировке ее положения с помощью двигателя стабилизации - суммируют сигнал корректирующей уставки с пропорциональной составляющей сигнала управления двигателем стабилизации в режиме приведения платформы или с пропорциональной и интегральной составляющими сигнала управления - в режиме стабилизации и управления платформой.
Достижение этого технического результата в устройстве обеспечивается тем, что в стабилизированной по крену инерциальной платформы, содержащей установленный в корпусе объекта одноосный карданов подвес без ограничения поворота, на оси которого расположен двигатель стабилизации и датчик углового положения платформы относительно корпуса, цифровую вычислительную машину, измерители линейных ускорений по трем взаимно ортогональным координатным осям платформы, выходы которых связаны через аналого-цифровой преобразователь со входами цифровой вычислительной машины, и, соответственно, измерители угловых скоростей, выходы двух из которых связаны через аналого-цифровой преобразователь со входами цифровой вычислительной машины, а выход третьего измерителя угловой скорости разворота по крену - со входами усилителя и интегратора, выходы которых подключены к входам сумматора, выход которого связан со входом двигателя стабилизации, в устройство введены дополнительный сумматор, цифроаналоговый преобразователь и нормально замкнутый коммутатор, причем выход измерителя угловой скорости разворота по крену подключен ко входу усилителя через дополнительный сумматор непосредственно, а ко входу интегратора - через нормально замкнутый коммутатор, выход цифровой вычислительной машины подключен ко второму входу сумматора через цифроаналоговый преобразователь, выход датчика углового положения платформы относительно корпуса подключен ко входу цифровой вычислительной машины, при этом измерители угловой скорости выполнены в виде волоконно-оптических или микромеханических гироскопов.
Схема, поясняющая суть предлагаемого изобретения, приведена на чертеже.
Повышение точности достигается тем, что в качестве измерителя угловой скорости стабилизированной по крену инерциальной платформы установлен ВОГ или микромеханический гироскоп, а сигнал управления формируется по разности измеряемой датчиком угловой скорости и уставки по скорости, компенсирующей погрешности гироскопа. С этой целью, дополнительно в контур управления стабилизатором вводится сумматор, обеспечивающий вычитание уставки, и ЦАП, формирующий сигнал уставки по цифровой информации, вычисляемой в цифровой вычислительной машине.
Обеспечение режима приведения достигается организацией контура управления по уставке скорости, требуемой для разворота в данном режиме. Решение этой задачи достигается вводом сумматора и ЦАП, аналогично введению уставки для компенсации погрешности. Кроме того, в контуре управления сигнал должен формироваться только по угловой скорости. Для решения этой задачи в интегральный канал вводится коммутатор для обнуления сигнала этого канала в суммарном управляющем сигнале. Таким образом, дополнительный сумматор и ЦАП используется для ввода уставок как для повышения точности, так и для проведения режима приведения (разворота), а коммутатор - для переключения режимов.
Для обоснования работы стабилизированной по крену инерциальной платформы в режиме стабилизации и приведения запишем ее уравнение движения по осям стабилизации в операторной форме записи при соответствующих допущениях


где  - момент инерции стабилизированной площадки;
- момент инерции стабилизированной площадки;
Me, Мв - момент, развиваемый двигателем стабилизации, и возмущающий момент, действующий по оси стабилизации;
 - угловая скорость стабилизированной площадки;
- угловая скорость стабилизированной площадки;
 - коэффициент демпфирования по оси стабилизации;
- коэффициент демпфирования по оси стабилизации;
Up - напряжение регулятора, представляющее собой сигнал управления двигателем стабилизации замкнутой системы регулирования скорости изменения угла крена платформы с пропорциональной составляющей  и интегральной составляющей
и интегральной составляющей  в соответствии с системой уравнений (1).
в соответствии с системой уравнений (1).
Uy - напряжение управления, являющееся уставкой, задающей скорость вращения платформы в режиме приведения, или угловое положение платформы в режиме стабилизации, и формируемого генератором тока;
Кдв - коэффициенты передачи по напряжению двигателя стабилизации;
K1, K2 - коэффициенты передачи регулятора, формирующие пропорциональную и интегральную составляющие сигнала управления.
s - оператор Лапласа.
В режиме стабилизации (Uy=0) характеристический полином системы стабилизации будет иметь вид при соответствующем преобразовании системы (1):

Выбирая в качестве стандартного характеристического полинома в виде (s+ωо)2 и проведя синтез регулятора, получим следующие выражения коэффициентов регулятора системы стабилизации.

где ω0 - собственная частота колебаний объекта, соответствующая его заданным динамическим характеристикам.
Можно показать, что в режиме приведения при движении при Мв=0, скорость разворота стабилизированной площадки будет определяться выражением:

При Uy=5 В и К2=100 В рад/сек будем иметь:

Таким образом, в стабилизированной по крену корректируемой инерциальной платформе возможно обеспечить режим приведения и тем самым использовать датчик угловой скорости в ее составе и исключить составляющие погрешности, пропорциональные g и g2.
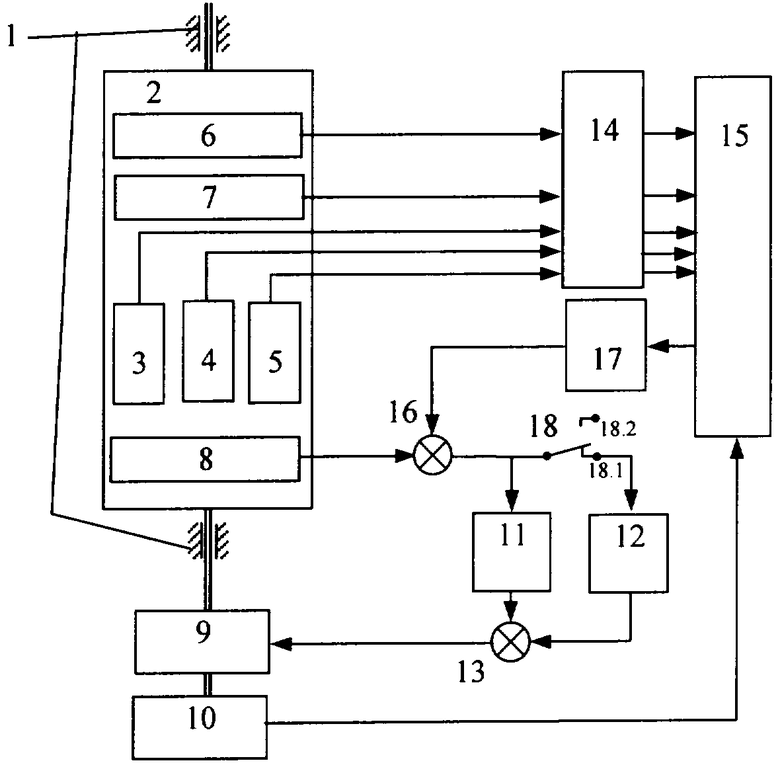
Стабилизированная по крену корректируемая инерциальная платформа состоит из одноосного карданового подвеса 1, состоящего из стабилизируемой платформы 2, на которой установлены измерители линейного ускорения 3, 4, 5, измерители угловой скорости (волоконно-оптические гироскопы или микромеханические гироскопы) 6, 7, 8. Выход последнего (расположенного по оси крена) проходит через дополнительный сумматор 16, выход которого одновременно подается на усилитель 11 и через дополнительный коммутатор 18 на интегратор 12, выходы которых суммируются на сумматоре 13, и далее поступают на двигатель стабилизации 9, установленный по оси крена. Совокупность этих элементов представляет собой регулятор в данном устройстве. По этой же оси (крена) установлен датчик углового положения 10 платформы относительно корпуса. Вторым входным сигналом дополнительного сумматора 16 является сигнал уставки с выхода ЦАП 17, являющегося в данном случае генератором тока для задающих значений (скорости разворота или заданного углового положения) регулятора. Его входным сигналом является цифровое значение уставки, формируемое в цифровой вычислительной машине 15. Сигналы с измерителей линейных ускорений и измерителей угловых скоростей по поперечным осям (к оси подвеса) через АЦП 14 подаются в цифровую вычислительную машину.
Работа стабилизированной по крену инерциальной платформы в режиме стабилизации и управления заключается в следующем.
Движение объекта, на корпусе которого установлена в одноосном кардановом подвесе стабилизированная платформа 2, приводит к появлению на выходах датчиков угловой скорости 6, 7, 8 сигналов, которые пропорциональны ее угловым скоростям. Сигналы с измерителей угловой скорости 6 и 7 поступают в цифровую вычислительную машину 15, которая вычисляет углы ориентации и значения погрешности определения угла крена. Сигнал с датчика угловой скорости 8 поступает на первый вход дополнительного сумматора 16, где он суммируется с сигналом уставки, компенсирующей погрешность определения угла крена, формируемым ЦАП 17. Суммарный сигнал поступает на вход усилителя 11 и через нормально замкнутые контакты коммутатора 18 (положение 18.1) на интегратор 12, на выходах которых формируются пропорциональная и интегральная составляющие сигнала управления. Сформированный на выходе сумматора 13 управляющий сигнал подается на двигатель стабилизации 9, который развивает стабилизирующий момент, удерживающий стабилизированную платформу 2 неподвижно относительно инерциального пространства.
Сигнал с датчика углового положения 10 будет пропорционален углу разворота объекта относительно неподвижной платформы 2, а сигналы с датчиков угловой скорости 6 и 7 будут пропорциональны угловой скорости разворота объекта по поперечным осям.
В режиме приведения по сигналам с цифровой вычислительной машины 15 контакты коммутатора 18 займут положение 18.2, а формируемый на выходе ЦАП 17 сигнал уставки будет соответствовать задаваемой скорости разворота. В этом случае момент, развиваемый двигателем стабилизации 9, будет пропорционален задаваемому с сумматора 16 напряжению и платформа 2 начнет вращаться с постоянной угловой скоростью, а с датчика углового положения 10 пойдет сигнал, пропорциональный углу разворота. При достижении требуемого угла разворота с микропроцессора поступает сигнал, при котором контакты коммутатора 18 займут положение 18.1, уставка скорости разворота обнулится и стабилизированная платформа перейдет в режим стабилизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ | 2000 |
|
RU2162230C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| СПОСОБ ИНЕРЦИАЛЬНОГО НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ СНАРЯДА | 2015 |
|
RU2584403C1 |
| БЛОК СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2567094C1 |
Изобретение относится к области приборостроения и может найти применение в системах определения их координат объектов с большой скоростью вращения по одной оси. Способ включает измерение угловых скоростей движения объекта, определение углового положения платформы относительно корпуса объекта, вычисление значения и формирование сигналов управления поворотом и стабилизацией платформы и корректировку ее положения с помощью двигателя стабилизации, при этом формируют сигнал корректирующей уставки по угловой скорости вокруг оси крена с учетом измеренных значений линейных ускорений по трем - и угловых скоростей по двум координатным осям платформы, не совпадающим с осью быстрого вращения объекта, а при формировании сигналов управления поворотом и стабилизацией платформы и корректировке ее положения с помощью двигателя стабилизации - суммируют сигнал корректирующей уставки с пропорциональной составляющей сигнала управления двигателем стабилизации в режиме приведения платформы или с пропорциональной и интегральной составляющими сигнала управления - в режиме стабилизации и управления платформой. Способ реализуется стабилизированной по крену инерциальной платформой для быстровращающихся объектов, содержащей установленный в корпусе объекта одноосный кардановый подвес без ограничения поворота, на оси которого расположен двигатель стабилизации и датчик углового положения платформы относительно корпуса, цифровую вычислительную машину, измерители линейных ускорений по трем взаимно ортогональным координатным осям платформы и измерители угловых скоростей, выполненные в виде волоконно-оптических или микромеханических гироскопов. Техническим результатом является повышение точности и приведения стабилизированной по крену корректируемой инерциальной системы за счет исключения погрешностей, пропорциональных первой и второй степени ускорения свободного падения (g и g2) и обеспечения режима коррекции и расширения диапазона измерения угловых скоростей и линейных ускорений. 2 н.п. ф-лы, 1 ил.
| RU 2191351 C1, 20.10.2002 | |||
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| Генератор случайного процесса | 1986 |
|
SU1424016A1 |
| Кассетный высевающий аппарат | 1980 |
|
SU986318A1 |
| ФЛЮС ДЛЯ КЕРАМИЧЕСКИХ НАДГЛАЗУРНЫХ КРАСОК | 2006 |
|
RU2311372C1 |
| US 5922039 А, 13.07.1999. | |||

