Изобретение относится к области систем обработки информации и может быть использовано при управлении линией электропередачи (ЛЭП), на основе ее адаптивной модели, перестраиваемой по текущей информации о параметрах электрического режима ЛЭП.
Известен способ определения текущих параметров электрического режима, например, для построения адаптивной модели ЛЭП [Мурзин П.В., Суворов А.А. Алгоритмы формирования параметров электрического режима в адаптивной модели ЛЭП // В 38 Вестник УГТУ-УПИ. Энергосистема: управление, качество, конкуренция: Сборник докладов II Всероссийской научно-технической конференции. Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2004. №12 (42). с.424-428], выбранный в качестве прототипа, заключающийся в том, что в начале и в конце ЛЭП с помощью регистратора аварийных событий (РАС) получают синхронизированные во времени массивы мгновенных значений токов и напряжений, с помощью или оптоволоконного или высокочастотного канала связи передают второй массив с конца ЛЭП в ее начало. Для определения параметров модели ЛЭП необходимы следующие параметры электрического режима, полученные в начале и конце линии: токи и напряжения первой гармоники, и фазовые углы между ними.
Для получения параметров электрического режима используют известное преобразование Фурье, в соответствии с которым амплитуды и фазы любой гармонической составляющей исходного сигнала определяют по его измеренным мгновенным значениям. При этом приближение исследуемой периодической функции считается наилучшим, так как в качестве коэффициентов тригонометрической суммы используют гармонические коэффициенты Фурье, предварительно найденные как:

где ak - коэффициент при функции косинуса;
bk - коэффициент при функции синуса;
k - номер гармоники;
yi - мгновенное значение сигнала для i-го отсчета;
ti - интервал от начала периода до (i+1)-го отсчета (в единицах отсчетов);
n - количество отсчетов в периоде;
Δti - шаг интегрирования.
Амплитуду и фазу k-й гармоники сигнала вычисляют следующим образом:

где Mk - амплитуда k-й гармоники сигнала;
ψk - фаза k-й гармоники, рад.
Причем в большинстве рассматриваемых задач определение фазы сигнала относительно момента времени начала измерений необходимо и достаточно выполнять только для первой гармоники, то есть значение коэффициента k во всех формулах в данном случае следует принять равным единице.
Находят амплитуды и фазы первых гармоник напряжения и тока в начале и конце линии, по которым производят построение адаптивной модели ЛЭП.
Известный способ определения текущих параметров электрического режима ЛЭП с помощью дискретного преобразования Фурье (ДПФ) для построения адаптивной модели линии электропередачи приведен на фиг.1, где КС - канал связи.
Недостатками известного способа являются многоэтапность и сложность его реализации из-за необходимости использования линейной или параболической аппроксимации мгновенных значений при контроле границ интервала интегрирования.
Задачей изобретения является создание простого, точного, информативного способа определения текущих параметров электрического режима линии электропередачи для построения ее адаптивной модели.
Это достигается тем (фиг.2), что в способе определения текущих параметров электрического режима ЛЭП для построения ее адаптивной модели, включающем также как в прототипе, измерение мгновенных значений сигналов напряжений и токов в начале и в конце линии и передачу массивов с конца линии в ее начало по каналу связи (КС).
Согласно изобретению, по массивам отсчетов мгновенных значений тока и напряжения в начале 
 и в конце линии электропередачи
и в конце линии электропередачи 
 полученным в одни и те же моменты времени tj=t1, t2,..., tN, с шагом
полученным в одни и те же моменты времени tj=t1, t2,..., tN, с шагом  ,
,
где Т - период сигнала тока (напряжения),
N - число отсчетов на периоде,
одновременно определяют действующие значения напряжения U1, U2 и тока I1, I2 в начале и в конце линии, сохраняют каждый цифровой отсчет, как текущий и предыдущий, определяют разность и сумму каждой пары текущего и предыдущего значений, перемножают их разность и сумму. Суммируют эти произведения, затем одновременно определяют реактивную мощность в начале линии электропередачи Q1 и реактивную мощность в конце линии электропередачи Q2, а также реактивные квазимощности  (с помощью теоремы Телледжена [П.Пенфилд и др. Энергетическая теория электрических цепей / П.Пенфилд, Р.Спенс, С.Дюинкер. - М.: Энергия, 1974. - 152 с.]). Далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1, и активную мощность в конце линии P2, определяют активные квазимощности
(с помощью теоремы Телледжена [П.Пенфилд и др. Энергетическая теория электрических цепей / П.Пенфилд, Р.Спенс, С.Дюинкер. - М.: Энергия, 1974. - 152 с.]). Далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1, и активную мощность в конце линии P2, определяют активные квазимощности  (с помощью теоремы Телледжена). Затем одновременно определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии. Также определяют угол расхождения векторов
(с помощью теоремы Телледжена). Затем одновременно определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии. Также определяют угол расхождения векторов  между напряжением U1, в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов
между напряжением U1, в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов  между током I1 в начале линии электропередачи и между током I2 в конце линии.
между током I1 в начале линии электропередачи и между током I2 в конце линии.
Полученные значения ϕ1, ϕ2, U1, U2,  , I2, I1,
, I2, I1,  являются исходными данными при создании адаптивной модели ЛЭП.
являются исходными данными при создании адаптивной модели ЛЭП.
Простота и точность предложенного способа заключается в том, что нет необходимости использования линейной или параболической аппроксимации мгновенных значений при контроле границ интервала интегрирования.
Предложенный способ является информативным за счет того, что позволяет определять углы расхождения векторов ϕ1 между напряжением U1, и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии, а также угол расхождения векторов  между напряжением в начале линии электропередачи U1 и между напряжением в конце ЛЭП U2, угол расхождения векторов
между напряжением в начале линии электропередачи U1 и между напряжением в конце ЛЭП U2, угол расхождения векторов  между током в начале линии электропередачи I1 между током в конце линии I2.
между током в начале линии электропередачи I1 между током в конце линии I2.
На фиг.1 изображена структурная схема реализации способа определения текущих параметров электрического режима ЛЭП для построения ее адаптивной модели, основанного на дискретном преобразовании Фурье (ДПФ).
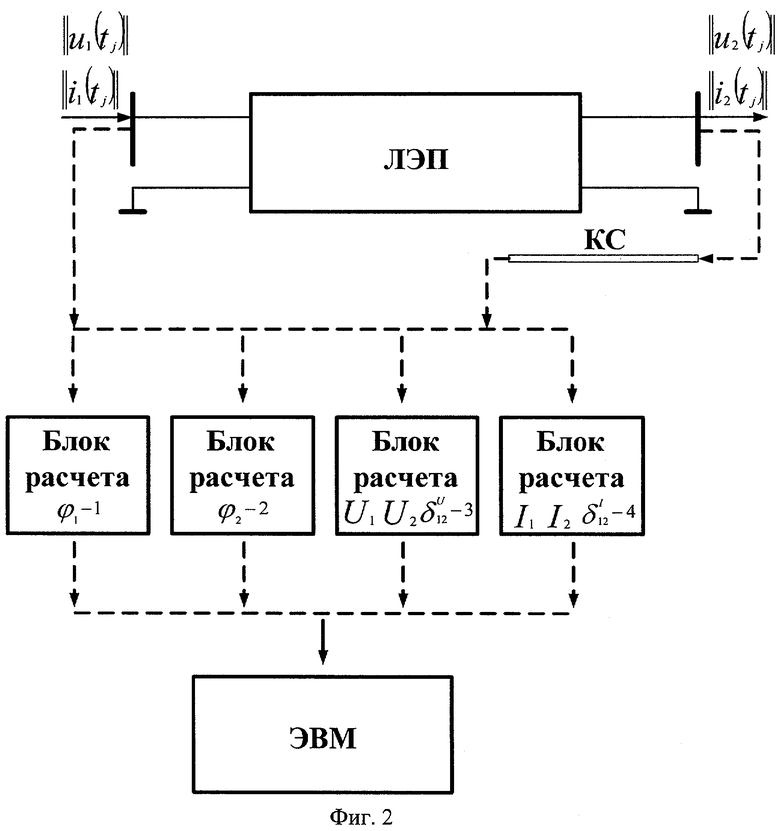
На фиг.2 приведена структурная схема реализации предложенного способа определения текущих параметров электрического режима ЛЭП для построения ее адаптивной модели.
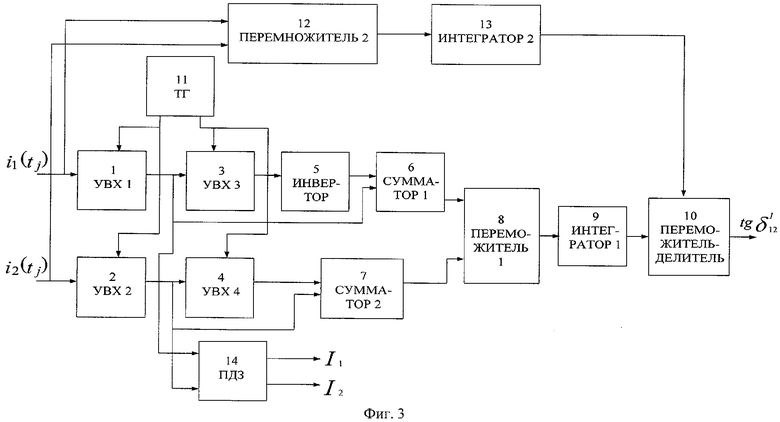
На фиг.3 изображена аппаратная схема устройства, реализующего рассматриваемый способ определения текущих параметров ЛЭП для построения ее адаптивной модели.
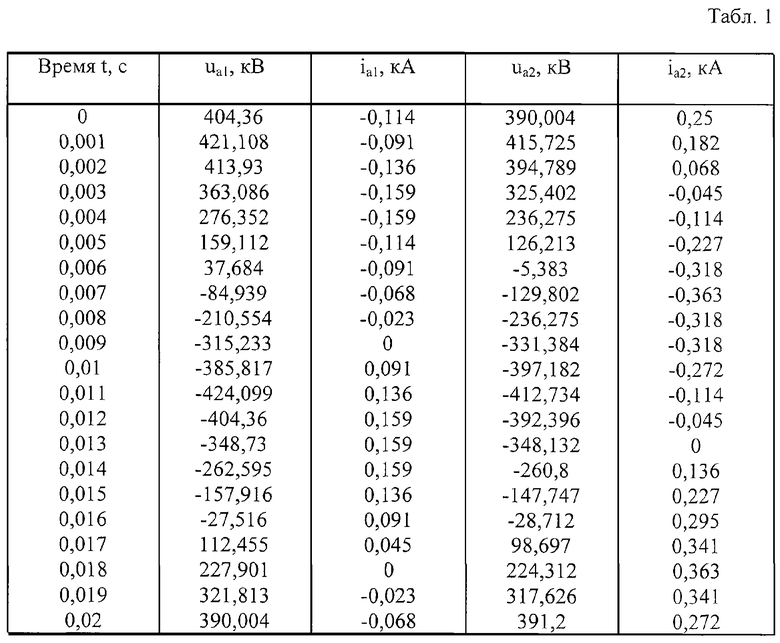
На фиг.4 приведена осциллограмма токов в начале и в конце ЛЭП.
В табл.1 приведены цифровые отсчеты мгновенных значений напряжений и токов в начале и в конце линии  ,
,  ,
, 
 для фазы А.
для фазы А.
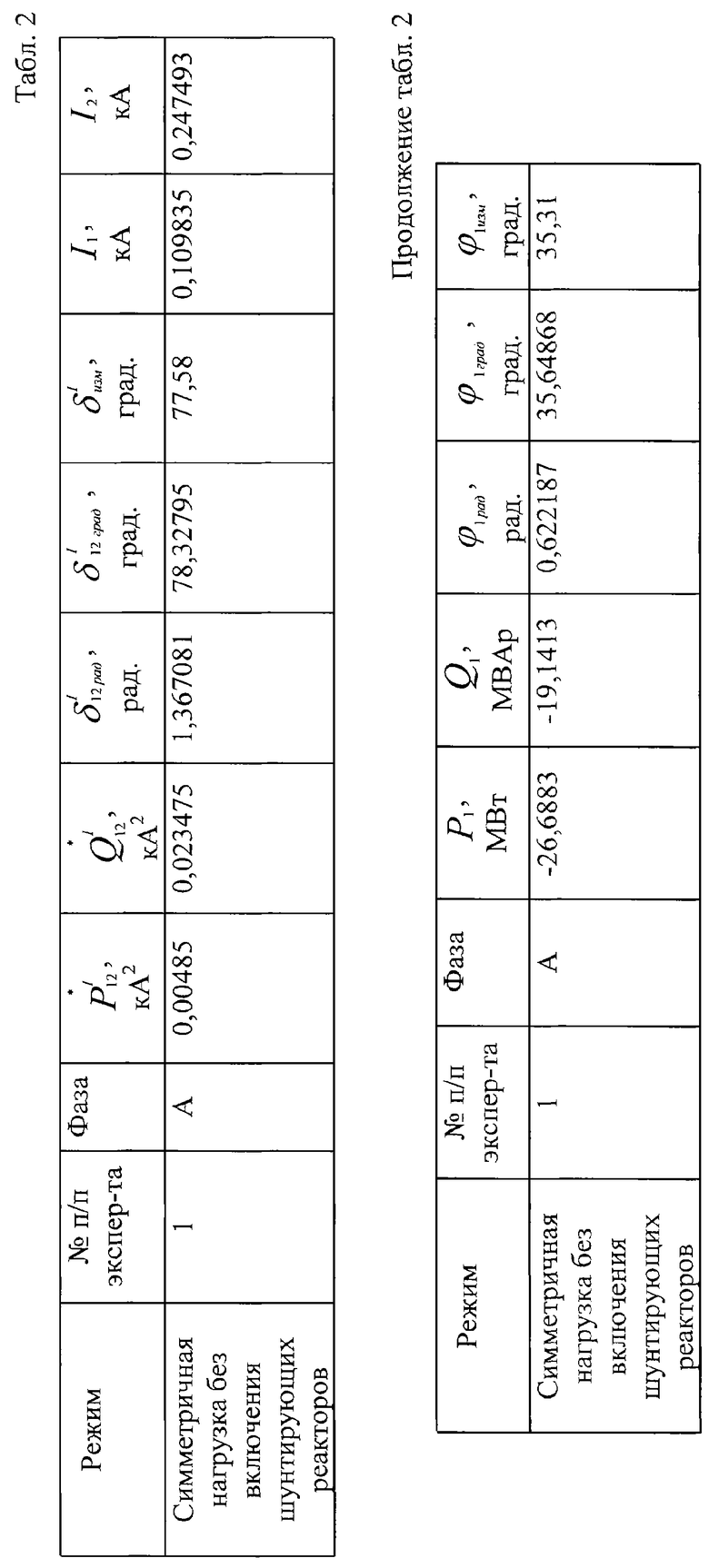
В табл.2 приведены результаты расчета угла расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, угла расхождения векторов  между током в начале линии электропередачи I1 и между током в конце линии I2, результаты расчета действующих значений I1 и I2.
между током в начале линии электропередачи I1 и между током в конце линии I2, результаты расчета действующих значений I1 и I2.
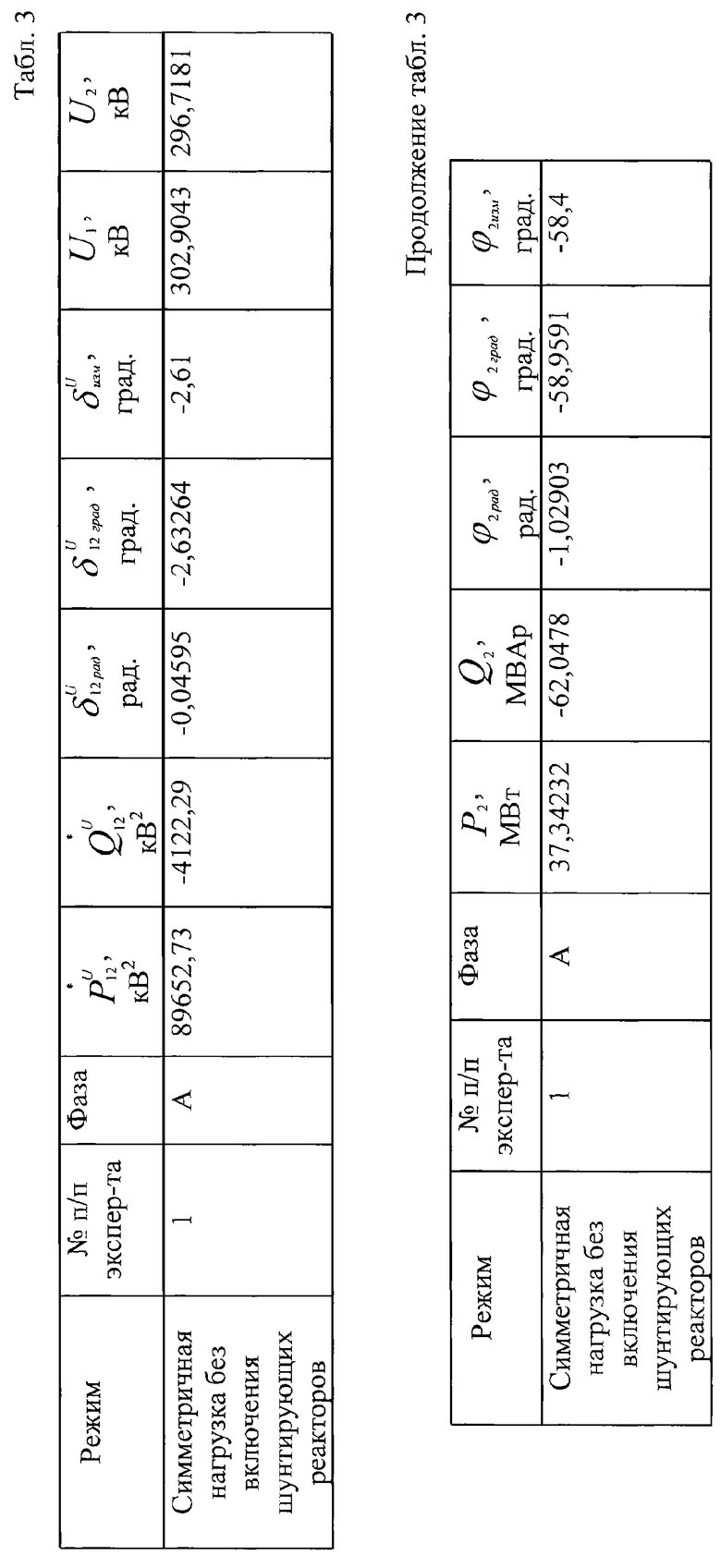
В табл.3 приведены результаты расчета угла ϕ2 между напряжением U2 и током I2 в конце линии, угла расхождения векторов  между напряжением в начале линии электропередачи U1 и между напряжением в конце линии U2, результаты расчета действующих значений U1 и U2.
между напряжением в начале линии электропередачи U1 и между напряжением в конце линии U2, результаты расчета действующих значений U1 и U2.
Способ может быть осуществлен с помощью устройства, представленного на фиг.2. В начале и в конце ЛЭП установлены регистраторы аварийных ситуаций (РАС, на фиг.2 не показаны) для создания массивов мгновенных значений токов начала и конца линии и напряжений начала и конца линии электропередачи с шагом дискретизации Δt. Регистраторы аварийных ситуаций через каналы связи связаны системой сбора и обработки информации, которая обычно расположена в начале ЛЭП. Устройство для определения текущих параметров линии состоит из четырех параллельно включенных блоков расчета, входы которых связаны с началом линии электропередачи и через канал связи (КС) с ее концом, а выходы блоков расчета подключены к ЭВМ: блок расчета ϕ1 - 1, блока расчета ϕ2 - 2, блока расчета U1, U2,  - 3, блока расчета I1, I2, - 4. Массивы отсчетов мгновенных значений напряжений и токов поступают на соответствующие входные шины блоков.
- 3, блока расчета I1, I2, - 4. Массивы отсчетов мгновенных значений напряжений и токов поступают на соответствующие входные шины блоков.
Например, блок расчета I1, I2, - 4 (фиг.3) включает в себя первое устройство выборки-хранения 1 (УВХ 1), второе устройство выборки-хранения 2 (УВХ 2), третье устройство выборки-хранения 3 (УВХ 3), четвертое устройство выборки-хранения 4 (УВХ 4), инвертор 5 (Инвертор), первый сумматор 6 (Сумматор 1), второй сумматор 7 (Сумматор 2), первый перемножитель 8 (Перемножитель 1), первый интегратор 9 (Интегратор 1), перемножитель-делитель 10 (Перемножитель-делитель), тактовый генератор 11 (ТГ), второй перемножитель 12 (Перемножитель 2), второй интегратор 13 (Интегратор 2), программатор действующих значений 14 (ПДЗ).;
Входные шины блока расчета I1, I2, - 4 подключены к входам устройств выборки-хранения: первого 1 (УВХ 1) и второго 2 (УВХ 2), выходы которых - к входам третьего 3 (УВХ 3), четвертого 4 (УВХ 4) устройств выборки-хранения, к входам программатора действующих значений 14 (ПДЗ). Выходы программатора действующих значений 14 (ПДЗ) подключены к входам сегментного индикатора для вывода действующих значений токов и напряжений (на фиг.3 не показан). Первое устройство выборки-хранения 1 (УВХ 1) подключено к входам первого сумматора 6 (Сумматор 1). Второе устройство выборки-хранения 2 (УВХ 2) подсоединено к входу второго сумматора 7 (Сумматор 2). Вход третьего устройства выборки-хранения 3 (УВХ 3) подключен к входу инвертора 5 (Инвертор), выход которого соединен с входом первого сумматора 6 (Сумматор 1). Выход четвертого устройства выборки-хранения 4 (УВХ 4) подключен к входу второго сумматора 7 (Сумматор 2). Выходы первого 6 (Сумматор 1) и второго 7 (Сумматор 2) сумматоров связаны с входами первого перемножителя 8 (Перемножитель 1), выход которого соединен с входом первого интегратора 9 (Интегратор 1). Выход первого интегратора 9 (Интегратор 1) связан с входом перемножителя-делителя 10 (Перемножитель-делитель). Выходы тактового генератора 11 (ТГ) связаны с входами управления первого 1 (УВХ 1), второго 2 (УВХ 2), третьего 3 (УВХ 3) и четвертого 4 (УВХ 4) устройств выборки-хранения. Входы второго перемножителя 12 (Перемножитель 2) подключены к входным шинам, а его выход к входу второго интегратора 13 (Интегратор 2). Выход второго интегратора 13 (Интегратор 2) подключен к множительным входам перемножителя-делителя 10 (Перемножитель-делитель). Выход перемножителя-делителя 10 (Перемножитель-делитель) соединен с входом сегментного индикатора для вывода значения сдвига фаз (на фиг.3 не показан).
Первое 1 (УВХ 1), второе 2 (УВХ 2), третье 3 (УВХ 3) и четвертое 4 (УВХ 4) устройства выборки-хранения могут быть реализованы на микросхемах 1100СК2. Инвертор 5 (Инвертор) может быть реализован на микросхеме 140УД17А. Первый 6 (Сумматор 1) второй 7 (Сумматор 2), сумматоры могут быть реализованы на операционных усилителях 140УД17А. В качестве первого перемножителя 8 (Перемножитель 1), второго перемножителя 12 (Перемножитель 2) и перемножителя-делителя 10 (Перемножитель-делитель) может быть использована микросхема 525ПСЗ. Первый интегратор 9 (Интегратор 1), второй интегратор 13 (Интегратор 2) могут быть реализованы на операционном усилителе 140УД17А. Тактовый генератор 11 (ТГ) может быть реализован на микроконтроллере АТ80С2051. Программатор действующих значений 14 (ПДЗ) может быть выполнен на микроконтроллере серии 51 производителя atmel AT89S53.
Схемы блока расчета ϕ1 - 1 и блока расчета ϕ2 - 2 идентичны схемам блока расчета U1, U2,  - 3 и блока расчета I1, I2, - 4, за исключением того, что схемы блока расчета ϕ1 - 1 и блока расчета ϕ2 - 2 выполняются без программатора действующих значений 14 (ПДЗ).
- 3 и блока расчета I1, I2, - 4, за исключением того, что схемы блока расчета ϕ1 - 1 и блока расчета ϕ2 - 2 выполняются без программатора действующих значений 14 (ПДЗ).
Для исследования была выбрана воздушная линия электропередачи 500 кВ протяженностью 400 км, выполненная проводом АС-300/66.
На входы блока расчета ϕ1 - 1, блока расчета ϕ2 - 2, блока расчета U1, U2,  - 3 и блока расчета I1, I2, - 4 устройства, реализующего рассматриваемый способ определения текущих параметров ЛЭП для построения ее адаптивной модели, подавали одновременно следующие сигналы:
- 3 и блока расчета I1, I2, - 4 устройства, реализующего рассматриваемый способ определения текущих параметров ЛЭП для построения ее адаптивной модели, подавали одновременно следующие сигналы:
1)  , на входные шины блока расчета ϕ1 - 1,
, на входные шины блока расчета ϕ1 - 1,
2)  ,
,  на входные шины блока расчета ϕ2 - 2,
на входные шины блока расчета ϕ2 - 2,
3)  ,
,  на входные шины блока расчета U1, U2,
на входные шины блока расчета U1, U2,  - 3,
- 3,
4)  ,
,  на входные шины блока расчета I1, I2, - 4.
на входные шины блока расчета I1, I2, - 4.
На блок расчета I1, I2, - 4 на вход первого устройства выборки-хранения 1 (УВХ 1) поступает сигнал i1(tj), а на вход второго устройства выборки-хранения 2 (УВХ 2) сигнал i2(tj),
где tj=t1, t2,..., tN,
 - число разбиений на периоде Т, Δt=1·10-3 с - шаг дискретизации массивов мгновенных значении токов и напряжений в начале и в конце ЛЭП.
- число разбиений на периоде Т, Δt=1·10-3 с - шаг дискретизации массивов мгновенных значении токов и напряжений в начале и в конце ЛЭП.
Массивы значений сигналов с ЛЭП представлены в табл.1. Значения сигналов записывали в блоки выборки-хранения 1 (УВХ 1) и 2 (УВХ 2) и хранили там, как текущие, затем с выхода устройства выборки-хранения 1 (УВХ 1) сигнал i1(tj) поступал на первый вход программатора действующих значений 14 (ПДЗ), затем поступил в устройство выборки-хранения 3 (УВХ 3) и стал предыдущим значением, а с выхода устройства выборки-хранения 2 (УВХ 2) значение сигнала i2(tj) поступило на второй вход программатора действующих значений 14 (ПДЗ), затем поступило в устройство выборки-хранения 4 (УВХ 4) и стало предыдущим значением. На выходах программатора действующих значений 14 (ПДЗ) получили действующие значения сигналов I1 и I2. Для массивов значений из табл.1 
С выхода устройства выборки-хранения 3 (УВХ 3) предыдущее значение сигнала i1(tj) поступало в инвертор 5 (Инвертор). С помощью инвертора 5 (Инвертор) отрицательное значение предыдущего сигнала i1(tj) преобразовывалось в положительное. С выхода инвертора 5 (Инвертор) значение сигнала i1(tj) поступало на вход сумматора 6 (Сумматор 1). В то же время с выхода устройства выборки-хранения 1 (УВХ 1) текущее значение сигнала i1(tj) поступало на вход сумматора 6 (Сумматор 1). С помощью сумматора 6 (Сумматор 1) определяли разность текущего и предыдущего значений сигнала i1(tj). Одновременно с описанным выше процессом с выхода устройства выборки-хранения 4 (УВХ 4) предыдущее значение сигнала i2(tj) поступало на вход сумматора 7 (Сумматор 2), а с выхода устройства выборки-хранения 2 (УВХ 2) текущее значение сигнала i2(tj) поступает на вход сумматора 7 (Сумматор 2). С помощью сумматора 7 (Сумматор 2) определяли сумму текущего и предыдущего значений сигнала i2(tj). С выхода сумматора 6 (Сумматор 1) разность текущего и предыдущего значений сигнала i1(tj) поступала на вход первого перемножителя 8 (Перемножитель 1), а с выхода сумматора 7 (Сумматор 2) сумма текущего и предыдущего значений сигнала i2(tj) поступала на вход первого перемножителя 8 (Перемножитель 1). С помощью первого перемножителя 8 (Перемножитель 1) значения разности и суммы сигналов перемножали и подавали на вход первого интегратора 9 (Интегратор 1). С помощью первого интегратора 9 (Интегратор 1) суммировали произведения разности и суммы сигналов и определяли значение реактивной квазимощности  В данном случае
В данном случае 
С выхода первого интегратора 9 (Интегратор 1) значение реактивной квазимощности поступало на вход перемножителя-делителя 10 (Перемножитель-делитель). В то же время, когда значения сигналов поступали в блоки выборки-хранения 1 (УВХ 1) и 2 (УВХ 2), они поступали и на второй перемножитель 12 (Перемножитель 2). С помощью второго перемножителя 12 (Перемножитель 2) определяли произведения текущих значений сигналов i1(tj) и i2(tj), которые поступали на вход второго интегратора 13 (Интегратор 2). С помощью второго интегратора 13 (Интегратор 2) определяли активную квазимощность. В данном случае 
С выхода второго интегратора 13 (Интегратор 2) значение активной квазимощности поступало на вход перемножителя-делителя 10 (Перемножитель-делитель), с помощью которого определяли сдвиг фазы между сигналами 
В данном случае 
Если  то
то 
Для наглядности проверки использовали сдвиги фаз  (см. фиг.4) и
(см. фиг.4) и  Угол
Угол  между векторами токов в начале и в конце ЛЭП получают посредством измерения угла между осциллограммами в моменты перехода кривых тока через нуль при ia1=0 кА и ia2=0 кА.
между векторами токов в начале и в конце ЛЭП получают посредством измерения угла между осциллограммами в моменты перехода кривых тока через нуль при ia1=0 кА и ia2=0 кА.
Работа остальных блоков расчета аналогична и заключается в том, что определяют действующие значения напряжения U1, U2 в начале и в конце линии с помощью блока расчета U1, U2,  - 3 по формулам:
- 3 по формулам: 
и
Затем сохраняют каждый цифровой отсчет как текущий и предыдущий, далее определяют разность и сумму каждой пары текущего и предыдущего значений, перемножают разность и сумму, затем суммируют произведения. Далее с помощью блока расчета ϕ1 - 1 определяют реактивную мощность в начале линии электропередачи Q1 и с помощью блока расчета ϕ2 - 2 определяют реактивную мощность в конце линии электропередачи Q2:
 (табл. 2)
(табл. 2)
 (табл. 3)
(табл. 3)
Затем, используя блок расчета U1, U2,  - 3, определяют реактивную квазимощность
- 3, определяют реактивную квазимощность  по следующей формуле:
по следующей формуле:
 (табл.3).
(табл.3).
Далее с помощью блока расчета ϕ1 - 1 перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 и с помощью блока расчета ϕ2 - 2 перемножают текущие отсчеты сигналов и определяют их активную мощность в конце линии P2:
 (табл. 2)
(табл. 2)
 (табл. 3)
(табл. 3)
Затем, используя блок расчета U1, U2,  - 3, определяют активную квазимощность
- 3, определяют активную квазимощность  по формуле:
по формуле:
 (табл. 3)
(табл. 3)
Далее определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии по следующим формулам:
 (табл. 2),
(табл. 2),
 (табл. 3),
(табл. 3),
определяют угол расхождения векторов  между напряжением в начале линии электропередачи U1 и между напряжением в конце ЛЭП U2 по формуле:
между напряжением в начале линии электропередачи U1 и между напряжением в конце ЛЭП U2 по формуле:
 (табл. 3)
(табл. 3)
Далее производят контроль полученных углов ϕ1, ϕ2,  ,
,  .
.
Например, для контроля правильности расчета угла построены осциллограммы токов в начале ia1 и в конце ia2 линии электропередачи. На фиг.4  - угол сдвига фазы между осциллограммами токов ia1 и ia2 линии, который фиксируется в момент перехода ia1 и ia2 через нуль при ia1=0 кА и ia2=0 кА.
- угол сдвига фазы между осциллограммами токов ia1 и ia2 линии, который фиксируется в момент перехода ia1 и ia2 через нуль при ia1=0 кА и ia2=0 кА.
По результатам расчетов из табл.2 и 3 видно, что сдвиг фаз между двумя синусоидальными сигналами, полученный с помощью предлагаемого способа  является близким по значению к реальному сдвигу фаз между тестовыми сигналами
является близким по значению к реальному сдвигу фаз между тестовыми сигналами  . Относительную погрешность (вычисляли по формуле [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся Втузов. - М.: Наука, 1980. - 976 с.]
. Относительную погрешность (вычисляли по формуле [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся Втузов. - М.: Наука, 1980. - 976 с.]
 ,
,
где  является приближенным значением числа
является приближенным значением числа  .
.
 .
.
Относительную погрешность (для остальных углов вычисляли по аналогичной формуле:
- для ϕ1 
- для ϕ2 
- для 

Таким образом, получен простой, точный и информативный способ определения текущих параметров электрического режима линии электропередачи для построения ее адаптивной модели.

Изобретение относится к области систем обработки информации и может быть использовано при управлении линией электропередачи (ЛЭП) на основе ее адаптивной модели, перестраиваемой по текущей информации о параметрах электрического режима ЛЭП. Изобретение направлено на упрощение, повышение точности и информативности определения текущих параметров электрического режима линии электропередачи. Предложенный способ заключается в том, что одновременно определяют действующие значения напряжения U1, U2 и тока I1, I2, соответственно в начале и в конце линии, сохраняют каждый цифровой отсчет как текущий и предыдущий, затем одновременно определяют реактивную мощность в начале линии электропередачи Q1, и реактивную мощность в конце линии электропередачи Q2, а также реактивные квазимощности  далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 и активную мощность в конце линии P2, определяют активные квазимощности
далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 и активную мощность в конце линии P2, определяют активные квазимощности  на основании которых определяют углы расхождения векторов ϕ1 между напряжением U1, и током I1, в начале линии электропередачи, ϕ1 между напряжением U2 и током I2 в конце линии, а также угол расхождения векторов
на основании которых определяют углы расхождения векторов ϕ1 между напряжением U1, и током I1, в начале линии электропередачи, ϕ1 между напряжением U2 и током I2 в конце линии, а также угол расхождения векторов  между напряжением U1 в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов
между напряжением U1 в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов  между током I1 в начале линии электропередачи и между током I2 в конце линии. 4 ил., 3 табл.
между током I1 в начале линии электропередачи и между током I2 в конце линии. 4 ил., 3 табл.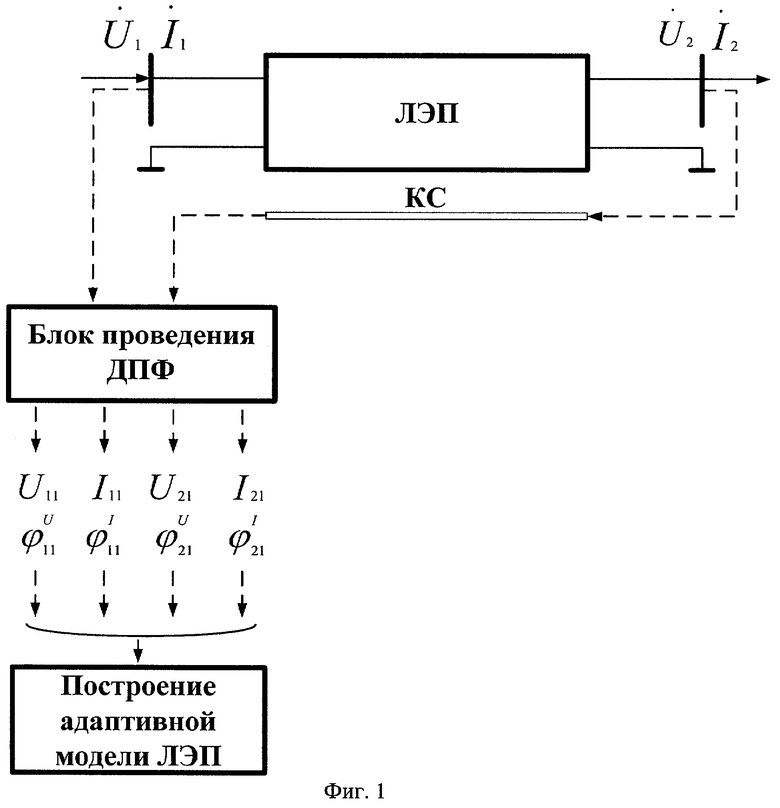
Способ определения текущих параметров электрического режима линии электропередачи для построения ее адаптивной модели по массивам мгновенных значений тока и напряжения в начале линии и синхронизированного с ним во времени и переданного по каналу связи массиву мгновенных значений тока и напряжения в конце линии, отличающийся тем, что по массивам отсчетов мгновенных значений тока и напряжения в начале 
 и в конце линии электропередачи
и в конце линии электропередачи 
 полученным в одни и те же моменты времени tj=t1, t2,...,tN, с шагом
полученным в одни и те же моменты времени tj=t1, t2,...,tN, с шагом  ,
,
где Т - период сигнала тока (напряжения);
N - число отсчетов на периоде,
одновременно определяют действующие значения напряжения U1, U2 и тока I1, I2 соответственно в начале и в конце линии с помощью блока расчета U1, U2,  , где - угол расхождения между напряжениями U1 и U2, и блока расчета I1, I2,
, где - угол расхождения между напряжениями U1 и U2, и блока расчета I1, I2,  где
где  угол расхождения между токами I1 и I2, сохраняют каждый цифровой отсчет как текущий и предыдущий, определяют разность и сумму каждой пары текущего и предыдущего значений, перемножают их разность и сумму и суммируют эти произведения, затем одновременно определяют реактивную мощность в начале линии электропередачи Q1 с помощью блока расчета ϕ1, где ϕ1 - угол расхождения между напряжением U1 и током I1 в начале линии электропередачи, и реактивную мощность в конце линии электропередачи Q2 с помощью блока расчета ϕ2, где ϕ2 - угол расхождения между напряжением U2 и током I2 в конце линии электропередачи, а также реактивные квазимощности
угол расхождения между токами I1 и I2, сохраняют каждый цифровой отсчет как текущий и предыдущий, определяют разность и сумму каждой пары текущего и предыдущего значений, перемножают их разность и сумму и суммируют эти произведения, затем одновременно определяют реактивную мощность в начале линии электропередачи Q1 с помощью блока расчета ϕ1, где ϕ1 - угол расхождения между напряжением U1 и током I1 в начале линии электропередачи, и реактивную мощность в конце линии электропередачи Q2 с помощью блока расчета ϕ2, где ϕ2 - угол расхождения между напряжением U2 и током I2 в конце линии электропередачи, а также реактивные квазимощности  и
и  соответственно с помощью блока расчета U1, U2, и блока расчета I1, I2, , далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 с помощью блока расчета ϕ1 и активную мощность в конце линии Р2 с помощью блока расчета ϕ2, определяют активные квазимощности
соответственно с помощью блока расчета U1, U2, и блока расчета I1, I2, , далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 с помощью блока расчета ϕ1 и активную мощность в конце линии Р2 с помощью блока расчета ϕ2, определяют активные квазимощности  и
и  соответственно с помощью блока расчета U1, U2, , и блока расчета I1, I2, , затем одновременно определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии по формулам:
соответственно с помощью блока расчета U1, U2, , и блока расчета I1, I2, , затем одновременно определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии по формулам:
а также угол расхождения векторов между напряжением U1 в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов между током I1 в начале линии электропередачи и между током I2 в конце линии по формулам:
затем производят контроль полученных углов ϕ1, ϕ2, ,  измеряя углы: ϕ1изм - между осциллограммами напряжения ua1 и тока ia1 в начале линии электропередачи; ϕ2изм - между осциллограммами напряжения ua2 и тока ia2 в конце линии;
измеряя углы: ϕ1изм - между осциллограммами напряжения ua1 и тока ia1 в начале линии электропередачи; ϕ2изм - между осциллограммами напряжения ua2 и тока ia2 в конце линии;  - между осциллограммами напряжения ua1 в начале линии электропередачи и напряжения ua2 в конце линии электропередачи;
- между осциллограммами напряжения ua1 в начале линии электропередачи и напряжения ua2 в конце линии электропередачи;  - между осциллограммами тока ia1 в начале линии электропередачи и тока iа2 в конце линии электропередачи, причем углы между соответствующими осциллограммами фиксируют в моменты перехода кривых через нуль.
- между осциллограммами тока ia1 в начале линии электропередачи и тока iа2 в конце линии электропередачи, причем углы между соответствующими осциллограммами фиксируют в моменты перехода кривых через нуль.
| RU 2004109898 A1, 10.10.2005 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ МЕЖДУ ДВУМЯ СИНУСОИДАЛЬНЫМИ СИГНАЛАМИ | 2003 |
|
RU2242014C1 |
| ЦИФРОВОЙ КОРРЕЛЯЦИОННЫЙ ФАЗОМЕТР | 1972 |
|
SU423066A1 |
| Цифровой фазометр | 1979 |
|
SU879498A1 |
| СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА | 0 |
|
SU256867A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

