Изобретение относится к области электротехники, а именно средствам обработки информации в электротехнике, и может быть использовано при определении мест повреждения воздушной линии электропередачи (ЛЭП) на основе использования уточненных параметров Т-образной схемы замещения.
Известен способ определения текущих параметров электрического режима, например, для построения адаптивной модели ЛЭП [Мурзин П.В., Суворов А.А. Алгоритмы формирования параметров электрического режима в адаптивной модели ЛЭП // В 38 Вестник УГТУ-УПИ. Энергосистема: управление, качество, конкуренция: Сборник докладов II Всероссийской научно-технической конференции. Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2004. №12 (42). С.424-428], заключающийся в том, что в начале и в конце ЛЭП с помощью регистраторов аварийных процессов получают синхронизированные во времени массивы мгновенных значений токов и напряжений, с помощью оптоволоконного или высокочастотного канала связи передают второй массив с конца ЛЭП в ее начало. Для определения параметров адаптивной модели линии необходимы следующие параметры электрического режима, полученные в начале и конце линии: токи и напряжения первой гармоники и фазовые углы между ними.
Для получения параметров электрического режима используют известное преобразование Фурье, в соответствии с которым амплитуды и фазы любой гармонической составляющей исходного сигнала определяют по его измеренным мгновенным значениям. При этом приближение исследуемой периодической функции считается наилучшим, так как в качестве коэффициентов тригонометрической суммы используют гармонические коэффициенты Фурье, предварительно найденные как:
 ,
,
 ,
,
где ak - коэффициент при функции косинуса;
bk - коэффициент при функции синуса;
k - номер гармоники;
yi - мгновенное значение сигнала для i-го отсчета;
ti - интервал от начала периода до (i+1)-го отсчета (в единицах отсчетов);
n - количество отсчетов в периоде;
Δti - шаг интегрирования.
Амплитуду и фазу k-й гармоники сигнала вычисляют следующим образом:
 ,
,
где Mk - амплитуда k-й гармоники сигнала;
ψk - фаза k-й гармоники, рад.
В большинстве рассматриваемых задач определение фазы сигнала относительно момента времени начала измерений необходимо и достаточно выполнять только для первой гармоники, то есть значение коэффициента k во всех формулах в данном случае следует принять равным единице.
Находят амплитуды и фазы первых гармоник напряжения и тока в начале и конце линии, по которым производят построение адаптивной модели ЛЭП.
Недостатком данного способа являются многоэтапность и сложность реализации из-за необходимости использования линейной или параболической аппроксимации мгновенных значений при контроле границ интервала интегрирования.
Известен способ определения текущих параметров электрического режима воздушной ЛЭП для построения ее Т-образной адаптивной модели [патент РФ №2308729, МПК (2006.01), G01R 27/04; G06G 7/63; опубликован 20.10.2007], выбранный в качестве прототипа, включающий также измерение мгновенных значений сигналов напряжений и токов в начале и в конце линии в режиме нагрузки и в режиме холостого хода, передачу массивов с конца линии в ее начало по каналу связи. Исходными данными при создании Т-образной адаптивной модели являются параметры электрического режима: значения активных и реактивных сопротивлений продольной и поперечной ветвей ЛЭП.
Для получения параметров электрического режима обрабатывают сигналы токов и напряжений, полученных в начале и конце ЛЭП в нагрузочном режиме и в режиме холостого хода. В режиме нагрузки с использованием коэффициента пропорциональности k=0; 0,1…1 распределения значений падений напряжений на продольных сопротивлениях определяют активное и реактивное сопротивления продольной  ,
,  ,
,  ,
,  и R0, X0 поперечной ветвей, представляющих собой область возможных решений определения параметров продольной и поперечной ветвей Т-образной адаптивной модели при распределениях значений продольных падений напряжений. В режиме холостого хода с помощью блоков расчета продольных активного и реактивного сопротивлений линии электропередачи
и R0, X0 поперечной ветвей, представляющих собой область возможных решений определения параметров продольной и поперечной ветвей Т-образной адаптивной модели при распределениях значений продольных падений напряжений. В режиме холостого хода с помощью блоков расчета продольных активного и реактивного сопротивлений линии электропередачи  ,
,  поперечных активного и реактивного сопротивлений линии электропередачи R0, X0 при коэффициенте k=1 получают суммарные значения активных
поперечных активного и реактивного сопротивлений линии электропередачи R0, X0 при коэффициенте k=1 получают суммарные значения активных  , и реактивных
, и реактивных  сопротивлений и по полученным значениям сопротивлений продольных и поперечной ветвей для режима нагрузки и для режима холостого хода определяют значение сопротивления продольных и поперечной ветвей Т-образной адаптивной модели:
сопротивлений и по полученным значениям сопротивлений продольных и поперечной ветвей для режима нагрузки и для режима холостого хода определяют значение сопротивления продольных и поперечной ветвей Т-образной адаптивной модели:  или
или 
По найденным параметрам продольной и поперечной ветвей , , , и R0, X0 производят построение адаптивной модели ЛЭП.
Этот способ является сложным, требует дополнительных затрат времени и может быть использован не для каждой ЛЭП.
Задачей изобретения является разработка более простого и точного способа определения параметров Т-образной схемы замещения воздушной линии электропередачи.
Поставленная задача решена за счет того, что в способе определения параметров Т-образной схемы замещения воздушной линии электропередачи, так же как в прототипе измеряют в режиме нагрузки мгновенные значения сигналов напряжений и токов в начале  и в конце
и в конце  линии для одних и тех же моментов времени tj=t1, t2,…,tn с дискретностью массивов мгновенных значений
линии для одних и тех же моментов времени tj=t1, t2,…,tn с дискретностью массивов мгновенных значений  ,
,
где Т - период сигнала напряжения (тока),
N - число разбиений на периоде Т,
передают сигналы с конца линии в ее начало по каналу связи, сохраняют пары цифровых отсчетов как текущие, определяют действующие значения токов в продольной и поперечной ветвях, определяют значения и потери активных и реактивных мощностей, определяют активные и реактивные сопротивления продольных ветвей схемы замещения линии.
Согласно изобретению после сохранения пар цифровых отсчетов как текущих одновременно формируют массивы мгновенных значений суммарных напряжения  и тока
и тока  и по этим массивам определяют активную и реактивную мощности, а по массивам мгновенных значений суммарного тока определяют действующее значение тока. Далее, учитывая определенные значения мощностей и тока, одновременно определяют активное и индуктивное сопротивления, которые и являются параметрами продольной ветви схемы замещении. Затем одновременно определяют потери активных и реактивных мощностей, а также значения активных и реактивных мощностей в продольных ветвях схемы замещения. Далее по значениям мощностей и потерь мощностей определяют активную и реактивную мощности поперечной ветви схемы замещения и формируют массив мгновенных значений тока поперечной ветви схемы замещения
и по этим массивам определяют активную и реактивную мощности, а по массивам мгновенных значений суммарного тока определяют действующее значение тока. Далее, учитывая определенные значения мощностей и тока, одновременно определяют активное и индуктивное сопротивления, которые и являются параметрами продольной ветви схемы замещении. Затем одновременно определяют потери активных и реактивных мощностей, а также значения активных и реактивных мощностей в продольных ветвях схемы замещения. Далее по значениям мощностей и потерь мощностей определяют активную и реактивную мощности поперечной ветви схемы замещения и формируют массив мгновенных значений тока поперечной ветви схемы замещения  , определяют действующее значение тока. Затем, учитывая
, определяют действующее значение тока. Затем, учитывая
определенные значения мощностей и тока, одновременно определяют активную и емкостную проводимости, которые и являются параметрами поперечной ветви схемы замещения.
Простота и точность предложенного способа по сравнению с прототипом заключаются в том, что достаточно использовать только один режим: нагрузочный.
Предложенный способ является информативным за счет того, что позволяет определять все параметры продольных и поперечной ветвей Т-образной схемы замещения линии электропередачи.
На фиг.1 представлена структурная схема реализации способа определения параметров Т-образной схемы замещения линии электропередачи.
На фиг.2 показана аппаратная схема блока устройства, реализующего рассматриваемый способ определения параметров Т-образной схемы замещения линии электропередачи (R, Х, G, В).
На фиг.3 представлена Т-образная схема замещения линии электропередачи, состоящая из двух продольных ab и bc и одной поперечной bd ветвей.
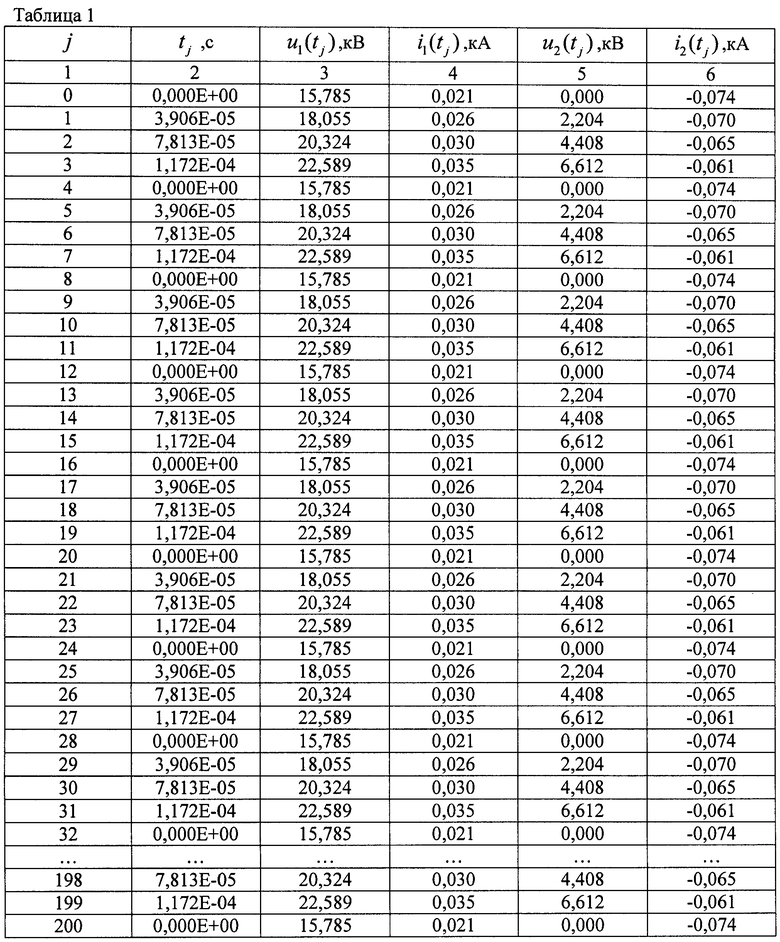
В таблице 1 приведены цифровые отсчеты мгновенных значений напряжений и токов в начале и в конце линии  для фазы А.
для фазы А.
В таблице 2 приведены результаты расчета параметров продольной ветви Т-образной схемы замещения линии.
В таблицах 3 и 4 представлены результаты расчета параметров поперечной ветви Т-образной схемы замещения ЛЭП.
В таблице 5 представлены эталонные параметры линии, рассчитанные по паспортным данным.
Способ может быть осуществлен с помощью устройства, представленного на фиг.1. В начале и в конце ЛЭП 1 установлены регистраторы аварийных процессов (на фиг.1 не показаны) для создания массивов мгновенных значений токов начала и конца линии и напряжений начала и конца линии электропередачи с шагом дискретизации Δt. Регистраторы аварийных процессов через каналы связи связаны с системой сбора и обработки информации, которая обычно расположена в начале ЛЭП 1. Устройство для определения параметров Т-образной схемы замещения линии электропередачи представляет собой блок расчета параметров 2. Вход блока расчета параметров 2 связан с началом ЛЭП 1 и через канал связи с ее концом. Выход блока расчета параметров 2 подключен к ЭВМ 3.
Блок расчета параметров 2 (фиг.1) состоит из первого, второго, третьего и четвертого устройств выборки и хранения 4 (УВХ 1), 5 (УВХ 2), 6 (УВХ 3), 7 (УВХ 4) соответственно, входы которых подключены к регистраторам аварийных процессов. К выходу первого устройства выборки-хранения 4 (УВХ 1) подключены первый, второй программаторы 8 (П 1), 9 (П 2) и первый сумматор 10 (С 1), к выходу которого подключены третий и четвертый программаторы 11 (П 3) и 12 (П 4). К выходам третьего и четвертого программаторов 11 (П 3) и 12 (П 4) подключены первый делитель 13 (Д 1) и пятый программатор 14 (П 5).
К выходу второго устройства выборки-хранения 5 (УВХ 2) последовательно подключены первый инвертор 15 (И 1) и первый сумматор 10 (С 1), а также подключены шестой и седьмой программаторы 16 (П 6) и 17 (П 7), к выходам которых подключен второй инвертор 18 (И 2), к выходу которого подключен второй сумматор 19 (С 2), к выходу которого подключены второй и третий делители 20 (Д 2) и 21 (Д 3).
К выходу третьего устройства выборки-хранения 6 (УВХ 3) подключены первый и второй программаторы 8 (П 1) и 9 (П 2), выходы которых подключены ко второму сумматору 19 (С 2), а также третий и четвертый сумматоры 22 (С 3), 23 (С 4) и программатор действующих значений 24 (ПДЗ), к выходу которого подключены первый и второй делители 13 (Д 1), 20 (Д 2) и третий инвертор 25 (И 3), к выходу которого подключен третий делитель 21 (Д 3).
К выходу четвертого устройства выборки-хранения 7 (УВХ 4) последовательно подключены первый инвертор 15 (И 1) и четвертый сумматор 23 (С 4), а также подключены шестой и седьмой программаторы 16 (П 6), 17 (П 7), третий сумматор 22 (С 3) и программатор действующих значений 24 (ПДЗ). К выходу третьего сумматора 22 (С 3) подключены третий, четвертый программаторы 11 (П 3), 12 (П 4) и последовательно подключены программатор действующих значений 24 (ПДЗ), пятый программатор 14 (П 5) и второй инвертор 18 (И 2). К выходу четвертого сумматора 23 (С 4) подключен программатор действующих значений 24 (ПДЗ).
Все делители 13 (Д 1), 20 (Д 2) и 21 (Д 3) подключены к ЭВМ 3 (фиг.1).
Все устройства выборки-хранения 4 (УВХ 1), 5 (УВХ 2), 6 (УВХ 3) и 7 (УВХ 4) могут быть реализованы на микросхемах 1100СК2. Первый, второй, третий, четвертый, пятый, шестой и седьмой программаторы 8 (П 1), 9 (П 2), 11 (П 3), 12 (П 4), 14 (П 5), 16 (П 6), 14 (П 7) и программатор действующих значений 24 (ПДЗ) могут быть выполнены на микроконтроллере серии 51 производителя atmel AT89S53. Первый, второй и третий инверторы 15 (И 1), 18 (И 2), 25 (И 3), первый, второй, третий и четвертый сумматоры 10 (С 1), 19 (С 2), 22 (С 3), 23 (С 4), первый, второй и третий делители 13 (Д 1), 20 (Д 2), 21 (Д 3) могут быть основаны на использовании микросхемы 525ПС3. Для работы пользователя может быть предусмотрена кнопочная клавиатура FT008, имеющая 8 кнопок, предназначенных для включения питания, запуска измерения, сохранения полученных значений и сегментный индикатор SCD55100 для вывода рассчитанных параметров Т-образной схемы замещения воздушной ЛЭП.
В качестве примера способа определения параметров Т-образной схемы замещения линии электропередачи рассматривается воздушная ЛЭП 220 кВ протяженностью 100 км, выполненная проводом AC - 240/32.
Посредством регистраторов аварийных процессов измеряют в режиме нагрузки мгновенные значения сигналов напряжений и токов в начале (табл.1) и в конце (табл.1) линии для одних и тех же моментов времени tj=t1, t2,…,tn с дискретностью массивов мгновенных значений 
где Т - период сигнала напряжения (тока),
N - число разбиений на периоде Т.
Сигналы с конца линии передают в ее начало по каналу связи. Далее сигналы 
 поступают соответственно на входы первого, второго, третьего и четвертого устройств выборки-хранения 4 (УВХ 1), 5 (УВХ 2), 6 (УВХ 3) и 7 (УВХ 4) блока расчета параметров 2 (фиг.2), где их записывают и хранят как текущие.
поступают соответственно на входы первого, второго, третьего и четвертого устройств выборки-хранения 4 (УВХ 1), 5 (УВХ 2), 6 (УВХ 3) и 7 (УВХ 4) блока расчета параметров 2 (фиг.2), где их записывают и хранят как текущие.
Затем с выхода второго устройства выборки-хранения 5 (УВХ 2) сигнал u2(tj) поступает на вход первого инвертора 15 (И 1), где его преобразуют в сигнал -u2(tj). Сигналы u1(tj) с выхода первого устройства выборки-хранения 4 (УВХ 1) и -u2(tj) с выхода первого инвертора 15 (И 1) поступают в первый сумматор 10 (С 1), на выходе которого формируется сигнал u12(tj)=u1(tj)-u2(tj).
Одновременно сигналы ii(tj) и i2(tj) с выходов третьего и четвертого устройств выборки-хранения 6 (УВХ 3) и 7 (УВХ 4) соответственно поступают в третий сумматор 22 (С 3), на выходе которого формируется сигнал i12(tj)=i1(tj)+i2(tj).
С выходов первого и третьего сумматоров 10 (С 1), 22 (С 3) сигналы u12(tj) и i12(tj) одновременно поступают на входы третьего и четвертого программаторов 11 (П 3), 12 (П 4). На выходе третьего программатора 11 (П 3) получают значение активной мощности Р12:
 (первый столбец табл.2).
(первый столбец табл.2).
На выходе четвертого программатора 12 (П 4) получают значение реактивной мощности Q12:
 (второй столбец табл.2).
(второй столбец табл.2).
Значения активной Р12 и реактивной Q12 мощностей с выходов третьего и четвертого 11 (П 3), 12 (П 4) программаторов поступают в делитель 13 (Д 1).
Одновременно с выхода третьего сумматора 22 (С 3) сигнал i12(tj) поступает на вход программатора действующих значений 24 (ПДЗ 1), на выходе которого получают действующее значение сигнала i12(tj):
 (третий столбец табл.2).
(третий столбец табл.2).
Далее с выхода программатора действующих значений 24 (ПДЗ) сигнал I12 поступает в первый делитель 13 (Д 1). С помощью первого делителя 13 (Д 1) одновременно получают значения активных 26.1 и 26.2 (фиг.3):
 (четвертый столбец табл.2)
(четвертый столбец табл.2)
и индуктивных 27.1 и 27.2 (фиг.3)
 (пятый столбец табл.2)
(пятый столбец табл.2)
сопротивлений продольных ветвей ab и bc Т-образной схемы замещения, которые выводятся на ЭВМ 3 (фиг.1).
Затем сигналы i1(tj) и i2(tj) с выходов третьего и четвертого устройств выборки-хранения 6 (УВХ 3), 7 (УВХ 4) соответственно поступают на вход программатора действующих значений 24 (ПДЗ), на выходе которого получают действующее значение сигналов i1(tj) и i2(tj) соответственно:
 (первый столбец табл.3);
(первый столбец табл.3);
 (второй столбец табл.3).
(второй столбец табл.3).
Далее сигналы I1, I2 и I12 c выхода программатора действующих значений 24 (ПДЗ) поступают на вход пятого программатора 14 (П 5). Одновременно на вход пятого программатора 14 (П 5) поступают сигналы Р12 с выхода третьего программатора 11 (П 3) и Q12 с выхода четвертого программатора 12 (П 4). На выходе пятого программатора 14 (П 5) одновременно получают значения потерь активных ΔPab, ΔPbc и реактивных ΔQab, ΔQbc мощностей в продольных ветвях ab и bc Т-образной схемы замещения линии (фиг.3):
 (третий столбец табл.3);
(третий столбец табл.3);
 (четвертый столбец табл.3);
(четвертый столбец табл.3);
 (пятый столбец табл.3);
(пятый столбец табл.3);
 (шестой столбец табл.3).
(шестой столбец табл.3).
Далее сигналы u1(tj), i1(tj) с выходов первого и третьего устройств выборки-хранения 4 (УВХ 1), 6 (УВЗ 3) соответственно поступают на входы первого и второго программаторов 8 (П 1), 9 (П 2).
На выходе первого программатора 8 (П 1) получают значение активной мощности в начале линии Pab:
 (первый столбец табл.4).
(первый столбец табл.4).
На выходе второго программатора 9 (П 2) получают значение реактивной мощности в начале линии Qab:
 (второй столбец табл.4).
(второй столбец табл.4).
Одновременно сигналы u2(tj), i2(tj) с выходов второго и четвертого устройств выборки-хранения 5 (УВХ 2), 7 (УВЗ 4) соответственно поступают одновременно на входы шестого и седьмого 17 (П 7), 16 (П 6) программаторов.
На выходе шестого программатора 16 (П 6) получают значение активной мощности в конце линии Pbc:
 (третий столбец табл.4).
(третий столбец табл.4).
На выходе седьмого программатора 17 (П 7) получают значение реактивной мощности в конце линии Qbc:
 (четвертый столбец табл.4).
(четвертый столбец табл.4).
Далее сигналы ΔPab, ΔPbc, ΔQab и ΔQbc с выхода пятого программатора 14 (П 5) и Pbc, Qbc с выходов шестого и седьмого программаторов 16 (П 6), 17 (П 7) соответственно поступают на вход второго инвертора 18 (И 2), на выходе которого получают сигналы: -ΔPab, -ΔPbc, -ΔQab, -ΔQbc, -Pbc и -Qbc.
Сигналы: -ΔPab, -ΔPbc, -ΔQab, -ΔQbc, -Pbc и -Qbc с выхода второго инвертора 18 (И 2), Pab с выхода первого программатора 8 (П 1) и Qab с выхода второго программатора 9 (П 2) поступают на вход второго сумматора 19 (С 2). На выходе второго сумматора 19 (С 2) получают значения активной Pbd и реактивной Qbd мощностей в поперечной ветви bd Т-образной схемы замещения линии (фиг.3):
Pbd=Pab-ΔPab-Pbc-ΔPbc=0,167 МВт (пятый столбец табл.4);
Qbd=Qab-ΔQab-Qbc-ΔQbc=-8,777 Мвар (шестой столбец табл.4).
Сигнал i2(tj) с выхода четвертого устройства выборки-хранения 7 (УВХ 4) поступает на вход первого инвертора 15 (И 1), где его преобразуют в сигнал -i2(tj). С выхода первого инвертора 15 (И 1) сигнал -i2(tj) поступает на вход четвертого сумматора 23 (С 4), туда же одновременно поступает сигнал i1(tj) с выхода третьего устройства выборки-хранения 6 (УВХ 3). На выходе четвертого сумматора 23 (С 4) получают сигнал i3(tj)=i1(tj)-i2(tj). Далее сигнал i3(tj) с выхода четвертого сумматора 20 (С 4) поступает на вход программатора действующих значений 24 (ПДЗ), на выходе которого получают действующее значение сигнала i3(tj):
 (седьмой столбец табл.4).
(седьмой столбец табл.4).
Затем сигнал Pbd с выхода второго сумматора 19 (С 2) и сигнал I3 c выхода программатора действующих значений 24 (ПДЗ) поступают на вход второго делителя 20 (Д 2). На выходе второго делителя 20 (Д 2) получают значение активной проводимости 28 поперечной ветви bd Т-образной схемы замещения линии (фиг.3):
 (восьмой столбец табл.4), которое выводится на ЭВМ 3 (фиг.1).
(восьмой столбец табл.4), которое выводится на ЭВМ 3 (фиг.1).
Одновременно сигнал I3 c выхода программатора действующих значений 24 (ПДЗ) поступает на вход третьего инвертора 25 (И 3), на выходе которого формируется сигнал -I3. Далее сигналы -I3 с выхода третьего инвертора 25 (И 3) и Qbd с выхода второго сумматора 19 (С 2) поступают на вход третьего делителя 21 (Д 3). На выходе третьего делителя 21 (Д 3) получают значение емкостной проводимости 29 поперечной ветви bd Т-образной схемы замещения линии (фиг.3):
 (девятый столбец табл.4), которое выводится на ЭВМ 3 (фиг.1).
(девятый столбец табл.4), которое выводится на ЭВМ 3 (фиг.1).
По результатам расчетов табл.3, 4, 5 видно, что параметры Т-образной схемы замещения воздушной ЛЭП, полученные с помощью предлагаемого способа, совпадают с их эталонными значениями. Относительную погрешность ε вычисляли по формуле [Бронштейн И.Н., Семендяев К.А. Справочник для инженеров и учащихся ВТУзов. - М.: Наука, 1980, - 976 с.]:

где а - расчетное значение параметра (является приближенным значением числа), z - эталонное значение (табл.5).
Для активного сопротивления продольной ветви Т-образной схемы замещения:
Для индуктивного сопротивления продольной ветви Т-образной схемы замещения:
Для активной проводимости поперечной ветви Т-образной схемы замещения:

Для емкостной проводимости поперечной ветви Т-образной схемы замещения:

Таким образом, получен простой, точный и информативный способ определения параметров Т-образной схемы замещения воздушной линии электропередачи.






Изобретение относится к области электротехники. Измеряют в режиме нагрузки мгновенные значения сигналов напряжений и токов в конце линии для одних и тех же моментов времени с дискретностью массивов мгновенных значений. Передают сигналы с конца линии в ее начало по каналу связи. Сохраняют пары цифровых отсчетов как текущие. Затем одновременно формируют массивы мгновенных значений суммарных напряжения и тока. По этим массивам определяют активную и реактивную мощности, а по массивам мгновенных значений суммарного тока определяют действующее значение тока. Одновременно определяют активное и индуктивное сопротивления, которые и являются параметрами продольной ветви схемы замещения. Затем одновременно определяют потери активных и реактивных мощностей, а также значения активных и реактивных мощностей в продольных ветвях схемы замещения. Затем, учитывая определенные значения мощностей и тока, одновременно определяют активную и емкостную проводимости, которые и являются параметрами поперечной ветви схемы замещения. Технический результат заключается в повышении точности. 3 ил., 5 табл.
Способ определения параметров Т-образной схемы замещения воздушной линии электропередачи, включающий измерение в режиме нагрузки мгновенных значений сигналов напряжений и токов в начале  и в конце
и в конце  линии для одних и тех же моментов времени tj=t1, t2, …,tn с дискретностью массивов мгновенных значений
линии для одних и тех же моментов времени tj=t1, t2, …,tn с дискретностью массивов мгновенных значений  , где Т - период сигнала напряжения (тока), N - число разбиений на периоде Т, передачу сигналов с конца линии в ее начало по каналу связи, сохранение пары цифровых отсчетов как текущих, определение действующих значений токов в продольной и поперечной ветвях, определение значений и потерь активных и реактивных мощностей, определение активных и реактивных сопротивлений продольных ветвей линии, отличающийся тем, что после сохранения пар цифровых отсчетов как текущих одновременно формируют массивы мгновенных значений суммарных напряжения
, где Т - период сигнала напряжения (тока), N - число разбиений на периоде Т, передачу сигналов с конца линии в ее начало по каналу связи, сохранение пары цифровых отсчетов как текущих, определение действующих значений токов в продольной и поперечной ветвях, определение значений и потерь активных и реактивных мощностей, определение активных и реактивных сопротивлений продольных ветвей линии, отличающийся тем, что после сохранения пар цифровых отсчетов как текущих одновременно формируют массивы мгновенных значений суммарных напряжения  и тока
и тока  и по этим массивам определяют активную и реактивную мощности, а по массивам мгновенных значений суммарного тока определяют действующее значение тока, далее, учитывая определенные значения мощностей и тока, одновременно определяют активное и индуктивное сопротивления, которые и являются параметрами продольной ветви схемы замещения; затем одновременно определяют потери активных и реактивных мощностей, а также значения активных и реактивных мощностей в продольных ветвях схемы замещения, далее по значениям мощностей и потерь мощностей определяют активную и реактивную мощности поперечной ветви схемы замещения и формируют массив мгновенных значений тока поперечной ветви схемы замещения
и по этим массивам определяют активную и реактивную мощности, а по массивам мгновенных значений суммарного тока определяют действующее значение тока, далее, учитывая определенные значения мощностей и тока, одновременно определяют активное и индуктивное сопротивления, которые и являются параметрами продольной ветви схемы замещения; затем одновременно определяют потери активных и реактивных мощностей, а также значения активных и реактивных мощностей в продольных ветвях схемы замещения, далее по значениям мощностей и потерь мощностей определяют активную и реактивную мощности поперечной ветви схемы замещения и формируют массив мгновенных значений тока поперечной ветви схемы замещения  , определяют действующее значение тока, затем, учитывая определенные значения мощностей и тока, одновременно определяют активную и емкостную проводимости, которые и являются параметрами поперечной ветви схемы замещения.
, определяют действующее значение тока, затем, учитывая определенные значения мощностей и тока, одновременно определяют активную и емкостную проводимости, которые и являются параметрами поперечной ветви схемы замещения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕКУЩИХ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОГО РЕЖИМА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ДЛЯ ПОСТРОЕНИЯ ЕЕ Т-ОБРАЗНОЙ АДАПТИВНОЙ МОДЕЛИ | 2006 |
|
RU2308729C1 |
| СПОСОБ РАСЧЕТА ПЕРЕХОДНЫХ ПРОЦЕССОВ В СЛОЖНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2159938C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ | 0 |
|
SU251948A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХСИСТЕМ | 0 |
|
SU285370A1 |

