Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и приборах безопасности грузоподъемных кранов.
Известен способ беспроводной передачи информации между системой управления грузоподъемного крана и стационарно расположенным постом управления, заключающийся в измерении рабочих параметров грузоподъемного крана, формировании оператором (крановщиком) сигналов управления грузоподъемным краном, их преобразовании в цифровые сигналы с последовательным форматом и последующей беспроводной передаче по радиоканалу между двумя модулями, один из которых входит в систему управления грузоподъемного крана, а другой расположен в указанном посте управления, а также последующем приеме в указанных модулях переданных сигналов и их обратном преобразовании в информационные и управляющие сигналы [1].
Недостатком данного способа является недостаточная безопасность работы крана, поскольку беспроводная передача информации осуществляется только для дистанционного радиоуправления грузоподъемным краном, а реализация функций защиты крана не предусматривается и возлагается на оператора (крановщика).
Автоматическая защита грузоподъемного крана реализуется в способе беспроводной передачи информации в системе безопасности грузоподъемного крана, заключающемся в выявлении приближения грузозахватного органа к оголовку стрелы, формировании непрерывного сигнала тревоги в случае уменьшения этого расстояния до минимально допустимой величины, преобразовании этого сигнала в радиосигнал, приеме этого радиосигнала в кабине грузоподъемного крана и в последующем преобразовании принятого сигнала в световой или звуковой сигналы, предупреждающие крановщика о достижении предельного верхнего положения грузозахватного органа [2].
Недостатком этого способа являются ограниченные функциональные возможности системы безопасности грузоподъемного крана, поскольку в нем осуществляется передача информации только о достижении предельной высоты подъема грузозахватного органа и соответственно реализуется только эта функция защиты.
Более совершенным и наиболее близким к предложенному является способ беспроводной передачи информации между модулями (блоками и датчиками) системы безопасности грузоподъемного крана путем измерения рабочих параметров крана, преобразования измеряемых величин в цифровые сигналы, формирования цифровых сигналов управления механизмами крана, преобразования цифровых измерительных и управляющих сигналов в электрические сигналы с последовательным кодом с добавлением номера (адреса) модуля и битов проверки правильности обмена информацией, преобразования сформированных электрических сигналов с последовательным кодом в излучение (ультразвук, радиосигнал или оптическое излучение), периодической передачи этого излучения, а также приема на грузоподъемном кране и последующего преобразования принятого излучения в электрический сигнал, который подвергается обратному преобразованию электрического сигнала с последовательным кодом в измерительные и управляющие сигналы [3].
В известном способе осуществляется беспроводная передача информации, необходимой для реализации различных функций автоматического контроля, защиты и управления грузоподъемного крана.
Однако эта передача осуществляется только между модулями, расположенными на грузоподъемном кране, т.е. в этом способе реализована замкнутая автономная система, не предусматривающая возможность приема информации из внешней среды, а также передачи сигналов во внешнюю среду (за пределы грузоподъемного крана). Это значительно ограничивает функциональные возможности системы безопасности и соответственно безопасность выполнения грузоподъемных работ.
В частности, из-за замкнутости системы безопасности, в известном способе не предусматривается реализация дополнительных функций защиты грузоподъемного крана с использованием информации о состоянии других кранов, в частности для предотвращения их столкновений, и информации от внешних датчиков состояния внешней среды, например скорости ветра. Не предусматривается реализации одновременного совместного управления краном как крановщиком, так и стропальщиком, а также реализации управления внешними устройствами, например стационарным освещением рабочей площадки. Отсутствует возможность обмена сообщениями между стропальщиком и крановщиком, не исключается несанкционированный доступ к управлению краном, не реализуется автоматическая дистанционная настройка системы безопасности крана, а также автоматическое дистанционное считывание регистратора параметров грузоподъемного крана или сигналов диагностики его технического состояния.
Кроме того, в известном способе передача информации организована только по сети, имеющей топологию типа «звезда», т.е. передача всей информации осуществляется только через один ведущий модуль системы безопасности, расположенный обычно в кабине грузоподъемного крана, а прямая передача информации между ведомыми модулями не предусматривается. Это приводит к снижению надежности передачи информации.
Если, например, один из модулей системы безопасности расположен на крюковой обойме грузоподъемного крана, а второй модуль - на оголовке стрелы, то передача информации от этих модулей возможно только в ведущий модуль, расположенный обычно в кабине крана, а прямой обмен информацией между этими модулями невозможен. Соответственно, если в процессе выполнения грузоподъемной операции становится невозможной прямая связь между модулем, расположенным на крюковой обойме и ведущим модулем, расположенным в кабине крана, например из-за появления экранирующего препятствия на пути распространения передаваемого радиосигнала, что имеет место, в частности, при опускании груза в котлован, то происходит отказ в работе системы безопасности.
В этой ситуации в известном способе не используется возможность передачи сигнала с крюковой обоймы в ведущий контроллер не непосредственно, а через оголовок стрелы. Т.е. не предусматривается возможность использования контроллера оголовка стрелы или любого другого контроллера в качестве ретранслятора для передачи информации в ведущий контроллер системы безопасности. Это также является существенным недостатком известного способа, приводящим к снижению надежности работы системы безопасности и соответственно безопасности выполнения грузоподъемных работ.
Задачей, на решение которой направлено предложенное техническое решение, является повышение безопасности выполнения грузоподъемных работ за счет:
- реализации в системе безопасности дополнительных функций защиты грузоподъемного крана с использованием информации о состоянии других кранов, в частности для предотвращения столкновений кранов;
- реализации в системе безопасности дополнительных функций защиты грузоподъемного крана с использованием информации от датчиков состояния внешней среды, например скорости ветра, расположенных стационарно или на других кранах;
- реализации одновременного совместного управления краном как крановщиком, так и стропальщиком (или другим лицом, находящимся вблизи работающего крана), в частности с обеспечением дополнительной блокировки (аварийной остановки) движений крана стропальщиком (другим лицом);
- обеспечения надежности передачи информационных и управляющих сообщений, в том числе сигналов аварийного отключения механизмов крана, путем самоорганизации сети (автоматического изменения ее конфигурации или трафика передачи сигналов) при изменении условий работы или геометрического положения отдельных узлов крана;
- реализации управления крановщиком или стропальщиком внешними устройствами, в частности стационарным освещением рабочей площадки, внешними сигнализаторами и т.п.;
- реализации обмена сообщениями, в частности речевыми, между стропальщиком и крановщиком;
- предотвращения несанкционированного доступа к управлению краном путем аутентификации крановщика и (или) стропальщика;
- автоматической дистанционной настройки (подстройки, перепрограммирования) системы безопасности крана перед началом его работы, в зависимости от плана производства работ или каких-либо внешних условий - автоматическая установка рабочего диапазона защиты от приближения к ЛЭП, ограничение грузоподъемности, высоты подъема стрелы или транспортной скорости крана в зависимости от скорости ветра, температуры окружающего воздуха, наличия тумана и т.д.;
- автоматического дистанционного считывания регистратора параметров грузоподъемного крана, в том числе передачи данных на стационарное устройство, например на терминал или компьютер, для последующей проработки профилактических мер по снижению аварийности работы крана;
- автоматического дистанционного считывания сигналов диагностики технического состояния системы безопасности или крана в целом для исключения допуска к работе крана с какой-либо технической неисправностью.
Указанная задача решается тем, что в способе беспроводной передачи информации в системе безопасности грузоподъемного крана путем измерения по меньшей мере одного рабочего параметра грузоподъемного крана или формирования по меньшей мере одного сигнала управления грузоподъемным краном по меньшей мере в одном модуле системы безопасности, их преобразования в цифровые сигналы с последовательным форматом и последующей беспроводной передачи в по меньше мере в один другой модуль системы безопасности, в котором осуществляют прием переданного сигнала и его последующее преобразование в информационный или управляющий сигнал, указанную беспроводную передачу осуществляют посредством открытой или самоорганизующейся сети. При этом беспроводную сеть выполняют с одним ведущим (координатором сети) и не менее чем с одним ведомым модулями системы безопасности грузоподъемного крана, а в процессе работы грузоподъемного крана в ведущем модуле (в координаторе сети) дополнительно осуществляют оценку качества связи ведомого модуля с ведущим, а также между ведомыми модулями системы безопасности, с последующим выявлением в ведущем модуле маршрута передачи данных с наилучшим качеством связи, определяют в результате этого схему сетевой маршрутизации передачи данных между модулями и реализуют соответствующую топологии сети путем передачи сигналов управления в ведомые модули.
Кроме того, для решения поставленной задачи, в процессе работы грузоподъемного крана дополнительно, по меньшей мере одним модулем системы безопасности, принимают сигнал от внешнего модуля, расположенного вне грузоподъемного крана, например на стационарном объекте, на другом грузоподъемном кране, на другом мобильном объекте, у стропальщика или у другого лица, находящегося вблизи грузоподъемного крана, в результате этого выявляют наличие около грузоподъемного крана внешнего модуля, оценивают качество связи между этими модулями и, соответственно, определяют возможность связи с ним, при наличии такой возможности, при помощи ведущего модуля осуществляют подключение этого внешнего модуля к беспроводной сети системы безопасности грузоподъемного крана.
Указанная задача решается также благодаря тому, что к беспроводной сети модулей системы безопасности грузоподъемного крана осуществляют беспроводное подключение внешнего модуля, реализованного, в частности:
- в виде измерителя скорости ветра, расположенного на стационарном объекте или на другом грузоподъемном кране, информационные сигналы которого используют для формирования сигналов управления - блокировки работы грузоподъемного крана в соответствии с предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти какого-либо контроллера, порядком формирования этих сигналов управления - блокировки, включая значение максимальной скорости ветра, при превышении которой осуществляют формирование этих сигналов;
- в виде измерителя пространственного положения другого грузоподъемного крана, его стрелы или другого подвижного объекта, информационные сигналы которого используют для формирования сигналов управления грузоподъемным краном в режиме его защиты от столкновений с другим грузоподъемным краном или с другим подвижным объектом в соответствии с предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти какого-либо контроллера порядком формирования этих сигналов управления. Причем с помощью указанного внешнего модуля осуществляют, в частности, прием сигналов глобальной спутниковой навигации типа «GPS» или «Глонасс», в результате чего формируют и передают по сети сигналы пространственного положения этого внешнего модуля, или осуществляют измерение угла азимута другого грузоподъемного крана, например путем выявления направления магнитного поля Земли, в результате чего формируют и передают по беспроводной сети сигналы пространственного положения его стрелы;
- в виде пульта, который передают в распоряжение стропальщика или другого лица, находящегося вблизи грузоподъемного крана, причем этот внешний модуль-пульт снабжают органами управления, с помощью которых формируют сигналы управления грузоподъемным краном, которые передают по сети и используют для включения или отключения механизмов или отдельных движений грузоподъемного крана в соответствии с предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти какого-либо модуля порядком использования этих сигналов управления. При этом сигналы управления грузоподъемным краном, которые принимают по беспроводной сети с внешнего модуля-пульта, используют, в частности, только для блокировки - отключения отдельных механизмов или отдельных движений грузоподъемного крана;
- в виде пульта, который передают в распоряжение стропальщика или другого лица, находящегося вблизи грузоподъемного крана, причем этот внешний модуль-пульт и дополнительно модуль, расположенный в кабине грузоподъемного крана, снабжают устройствами передачи и приема информационных или речевых сообщений, с помощью которых осуществляют симплексную или дуплексную передачу этих сообщений по беспроводной сети, после их указанного преобразования в цифровые сигналы с последовательным форматом;
- в виде контроллера стационарно расположенных устройств или объектов, с помощью которого осуществляют управление этими устройствами или объектами, в частности устройствами внешнего освещения рабочей зоны грузоподъемного крана или внешними сигнализаторами, причем сигналы управления этими устройствами или объектами передают по беспроводной сети от по меньшей мере одного другого модуля. Указанные сигналы управления внешними устройствами или объектами могут также формироваться при помощи крановщика и модуля, расположенного в кабине грузоподъемного крана, который дополнительно который снабжают соответствующими органами управления, или при помощи стропальщика или другого лица, находящегося вблизи грузоподъемного крана, и переданного в его распоряжение внешнего модуля-пульта, снабженного органами управления;
- в виде ключа (метки) крановщика и (или) стропальщика. При этом в цифровые сигналы с последовательным форматом, передаваемые по беспроводной сети этим модулем, дополнительно включают идентификационный код этого модуля (индивидуальный код крановщика или стропальщика), а после приема этих сигналов в каком-либо модуле системы безопасности осуществляют сравнение этого кода с кодом-образцом, который предварительно записывают в его энергонезависимое запоминающее устройство, и, в случае несовпадения этих кодов, формируют предупреждающий сигнал или сигнал блокировки - запрета работы грузоподъемного крана;
- в виде программатора, от которого в беспроводную сеть передают сигналы дистанционной настройки (подстройки, перепрограммирования) параметров системы безопасности грузоподъемного крана перед началом его работы, для чего указанные сигналы подстройки, которые принимают в одном из модулей системы безопасности грузоподъемного крана, используют в соответствии с порядком настройки системы безопасности, предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти этого модуля. Причем сигналы настройки определяют при разработке плана производства работ грузоподъемным краном или путем измерения параметров внешней среды, в частности ее температуры и скорости ветра, а после их указанного приема в одном из модулей системы безопасности используют для ограничения какого-либо рабочего параметра грузоподъемного крана, в частности высоты подъема стрелы, максимальной грузоподъемности, транспортной скорости или расстояния до линии электропередачи;
- в виде бесконтактного устройства считывания данных регистратора параметров грузоподъемного крана, от которого в беспроводную сеть передают сигналы управления передачей данных встроенного в систему безопасности регистратора параметров, которые принимают в одном из модулей системы безопасности грузоподъемного крана и используют в соответствии с предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти этого модуля порядком считывания данных регистратора параметров, которые по беспроводной сети передают в указанный внешний модуль - бесконтактное устройство считывания. Причем в качестве этого внешнего модуля - бесконтактного устройства считывания может быть использован компьютер или специальный терминал, предварительно оснащенный устройством бесконтактного чтения/записи данных, совместимым по протоколу с протоколом беспроводной сети грузоподъемного крана. Кроме того, в этот внешний модуль - считыватель дополнительно могут передаваться данные встроенной системы диагностики системы безопасности или диагностики грузоподъемного крана в целом.
Указанная техническая задача решается также тем, что в процессе работы грузоподъемного крана дополнительно, по меньшей мере двумя модулями системы безопасности, принимают сигналы от внешнего модуля, расположенного вне грузоподъемного крана, оценивают качество связи между этими модулями, после чего в ведущем модуле выявляют указанный маршрут передачи данных с наилучшим качеством связи и в случае, когда выявляют, что наилучшее качество связи между модулями системы безопасности грузоподъемного крана достигается при передаче данных через внешний модуль, в частности из-за экранирования отдельных модулей конструкциями грузоподъемного крана, при помощи ведущего модуля осуществляют указанное подключение этого внешнего модуля к беспроводной сети и используют его в качестве ретранслятора (туннеля) для передачи сообщений между модулями системы безопасности грузоподъемного крана.
Реализация указанных отличительных признаков позволяет создать систему безопасности грузоподъемного крана с открытой или самоорганизующейся структурой, что ранее в системах контроля, защиты и управления грузоподъемных кранов не использовалось.
Благодаря этим признакам, структура и набор функций, выполняемых системой безопасности, не остаются неизменными, а автоматически изменяется в зависимости от окружающей среды, от наличия в ней каких-либо электронных устройств, имеющих беспроводный интерфейс, совместимый с интерфейсом (протоколом) беспроводной сети грузоподъемного крана.
Если ведущий контроллер (координатор сети) системы безопасности грузоподъемного крана обнаруживает вблизи грузоподъемного крана какое-либо внешнее устройство (модуль, контроллер и т.п.), способное передавать или принимать информацию, которая может быть использована для повышения безопасности выполнения грузоподъемных работ, то такое внешнее устройство автоматически подключается к сети системы безопасности грузоподъемного крана, т.е. становится одним из узлов этой сети. Благодаря этому обеспечивается возможность реализации многочисленных дополнительных функций, в том числе функций защиты грузоподъемного крана с использованием информации о состоянии других кранов (для предотвращения столкновений кранов), блокировки работы при неблагоприятном состоянии внешней среды (например, при высокой скорости ветра), реализации одновременного совместного управления краном как крановщиком, так и стропальщиком, реализации управления внешними устройствами (например, стационарным освещением рабочей площадки), обмена сообщениями между стропальщиком и крановщиком, исключения несанкционированного доступа к управлению краном, автоматической дистанционной настройки системы безопасности крана, автоматического дистанционного считывания регистратора параметров грузоподъемного крана или сигналов диагностики его технического состояния и т.д.
Очевидно, что реализация этих функций обеспечивает существенное повышение безопасности выполнения грузоподъемных работ. Поэтому отличительные признаки заявленного способа передачи информации в системе безопасности грузоподъемного крана находятся в прямой причинно-следственной связи с указанным техническим результатом.
Заявителю неизвестно применение этих признаков или эквивалентных им в известных системах безопасности или в системах управления грузоподъемных кранов.
Состав системы безопасности грузоподъемного крана, реализующей предложенный способ передачи информации, зависит от конструктивного исполнения грузоподъемного крана (стреловой, мостовой, кран-трубоукладчик и т.д.) и нормативных требований правил к его устройству и безопасной эксплуатации. Эта система может содержать различные модули (электронные блоки и датчики), в частности, модуль-пульт крановщика (блок обработки данных, управления и индикации), модуль исполнительных устройств, модуль датчика угла наклона стрелы, модуль датчика длины стрелы, модуль датчика усилия или давления, модуль датчика азимута, модуль датчика приближения к линии электропередач, модуль датчика ветра и т.д.
Необходимый конкретный набор модулей (блоков и датчиков) в системе безопасности любого грузоподъемного крана общеизвестен, не влияет на техническую сущность предложенного технического решения и при его описании не рассматривается.
На чертеже, в качестве примера, представлена упрощенная функциональная схема одного из возможных вариантов построения модуля системы безопасности грузоподъемного крана, реализующей предложенный способ передачи информации. Другие модули системы безопасности могут быть выполнены по аналогичной схеме, либо могут отличаться от представленного на чертеже отсутствием отдельных функциональных блоков или наличием дополнительных блоков. Модуль может именоваться контроллером, узлом сети, устройством, электронным блоком, датчиком и т.п., что не имеет принципиального значения.
Каждый модуль системы безопасности содержит модем 1, микроконтроллер 2 и источник питания (на чертеже условно не показан). К микроконтроллеру 2, в зависимости от назначения модуля, могут быть подключены цифровые или аналоговые датчики (первичные преобразователи) или органы управления 3 и (или) исполнительные устройства 4.
Датчики (первичные преобразователи) и органы управления 3 могут быть как встроенными в модуль, так и выполненными автономными и подключенными к нему.
В качестве датчиков - первичных преобразователей рабочих параметров грузоподъемного крана и положения его грузоподъемного (стрелового) оборудования - могут быть использованы тензометрические датчики усилий и давлений, потенциометрические датчики длины стрелы и азимута, датчик угла наклона стрелы на основе акселерометра и т.д. В случае применения датчиков с аналоговым выходным сигналом, микроконтроллер 2 снабжается встроенным аналого-цифровым преобразователем (АЦП).
Органы управления 3 содержат набор кнопок, клавиш, переключателей и т.п. и могут быть или встроены в этот модуль, или подключены к нему.
Исполнительные устройства 4 могут быть выполнены в виде набора электронных силовых ключей, обеспечивающих усиление выходных сигналов микроконтроллера 2 до уровня, необходимого для управления исполнительными механизмами грузоподъемного крана, например электромагнитами гидравлических распределителей или электромагнитными пускателями.
Модуль, расположенный в кабине грузоподъемного крана и используемый, как правило, в качестве пульта крановщика, может дополнительно содержать элементы световой и звуковой сигнализации, выполненные в виде сигнальных ламп, светодиодов, акустического преобразователя, символьного дисплея и т.п., которые подключаются к микроконтроллеру 2 непосредственно или через дополнительные интерфейсные схемы - усилители (на чертеже условно не показано).
Для организации голосовой связи крановщика со стропальщиком модуль снабжается микрофоном с микрофонным усилителем и громкоговорителем с соответствующим усилителем мощности (на чертеже условно не показаны). При этом выход микрофонного усилителя подключается к входу АЦП, встроенного в микроконтроллер 2, а вход усилителя мощности - к выходу встроенного в микроконтроллер 2 цифроаналогового преобразователя (ЦАП).
Модем 1 содержит, в частности, приемник 5, передатчик 6 и цифровой трансивер 7, работа которых поддерживается общим генератором 8. Для связи модема 1 с микроконтроллером 2 по последовательному интерфейсу, например типа SPI, модем 1 содержит контроллер последовательного интерфейса 9. С целью снижения требований к вычислительным ресурсам (быстродействию) микроконтроллера 2, трансивер 1 содержит буферное оперативное запоминающее устройство (ОЗУ) 10, предназначенное для временного хранения данных, передаваемых и принимаемых модемом 1.
Распределение потока данных в модеме 1 осуществляется с помощью управляющей логики 11. Одновременно эта логика производит установку необходимого режима работы схемы управления энергопотреблением 12.
В качестве микроконтроллера 2 могут быть использованы, в частности, микроконтроллеры серий PIC18 компании Microchip, ATmega компании Atmel или НСS08 компании Motorola, а в качестве модема 1 - микросхемы МС13192 компании Freescale Semiconductor или СС2420/ЕМ2420 компаний ChipCon/Ember.
Модули, используемые как датчики, содержат, как правило, автономные источники питания, например литиевые гальванические элементы или аккумуляторы в сочетании с солнечными элементами для их подзарядки. Питание модулей исполнительных устройств, а также модулей с повышенным энергопотреблением, целесообразно осуществлять от бортовой сети грузоподъемного крана.
Один из модулей беспроводной сети системы безопасности грузоподъемного крана является координатором сети или ведущим модулем. Все остальные модули являются ведомыми. Соответствующее назначение модулей осуществляется при программировании микроконтроллеров 2 этих модулей, т.е. путем записи соответствующих программ работы микроконтроллеров 2 в их энергонезависимые запоминающие устройства.
Все модули, включая ведомые, с точки зрения осуществления обмена по сети, являются полнофункциональными, т.е. могут осуществлять соединения с любыми другими модулями. В отдельных случаях, возможно также наличие в сети модулей с уменьшенной функциональностью, которые могут устанавливать соединения только с полнофункциональными модулями.
Топология беспроводной сети в предложенном способе обмена информацией заранее не определена. Если ведомый модуль обменивается данными только с ведущим, то беспроводная сеть имеет топологию типа "звезда". А в случае обмена информацией (данными) ведомых модулей между собой, топология сети становится более сложной - типа "каждый с каждым", или может представлять собой объединение нескольких звездообразных кластеров. Но в любом случае один из модулей (ведущий модуль) выполняет функцию координатора сети.
Каждому модулю в сети присваивается адрес-идентификатор. Причем для обеспечения возможности связи с разнообразными внешними модулями, а также между другими сетями, например с беспроводной сетью другого грузоподъемного крана, необходима развитая система адресации. Поэтому используется, например, 64-разрядная система адресации. Для упрощения обмена внутри системы безопасности, т.е. между модулями, расположенными на грузоподъемном кране, координатор сети (ведущий модуль) может присваивать ведомым модулям более короткие, например 16-разрядные адреса. В этом случае для межсетевого взаимодействия используются идентификаторы сетей, также назначаемые координатором.
Каждый модуль осуществляет прием сигналов от соседних модулей, включая модули, расположенные вне грузоподъемного крана, и сообщает ведущему модулю (координатору сети) о качестве приема. В результате этого, в памяти микроконтроллера 2 ведущего модуля создается база данных о наличии модулей в системе, их идентификационных адресах и о качестве связи между ними. Микроконтроллер 2 ведущего модуля (координатора сети), работая по записанной в его памяти программе, в частности путем прямого перебора различных вариантов организации связи между модулями, выявляет маршрут передачи данных с наилучшим качеством связи и далее задает схему сетевой маршрутизации передачи данных между модулями (топологию сети) путем передачи по сети соответствующих сигналов управления в ведомые модули. При этом очевидно, что выбор маршрута передачи данных от каждого модуля, при котором осуществляется наилучший обмен информацией, может зависеть от конструкции крана и от расположения его стрелового оборудования.
Если в координатор сети поступают данные о возможности связи с каким-либо внешним модулем, то в соответствии с программой, предварительно записанной в памяти микроконтроллера 2 этого координатора сети (ведущего модуля), путем анализа адреса-идентификатора внешнего модуля определяется целесообразность его подключения к сети. Ведущий модуль подключает внешний модуль к сети, если последний передает информацию, которая может быть использована для повышения безопасности работы грузоподъемного крана, или если он является контроллером каких-либо внешних устройств, управление которыми также приводит к повышению безопасности работы крана.
В итоге осуществляется коммутация и маршрутизация передаваемой между модулями информации, включая реализацию обмена информацией с внешними по отношению к грузоподъемному крану модулями и внешними сетями. Одновременно любой модуль, в том числе расположенный вне грузоподъемного крана, может использоваться в качестве ретранслятора для передачи информации от ведомого модуля к ведущему. В частности, расположенные в непосредственной близости от грузоподъемного крана какие-либо внешние модули, излучающие сигналы высокой интенсивности, не ухудшают передачу информации в системе за счет помех радиоприему, а наоборот, могут улучшить передачу информации, поскольку прием сигнала высокой интенсивности от какого-либо модуля свидетельствует о том, что через этот модуль возможна эффективная ретрансляция передаваемой информации.
Если в пределах действия беспроводной сети появляется внешний модуль, представляющий из себя какое-либо стандартное устройство, например персональный компьютер, снабженный беспроводным модемом, использующим какой-либо стандартный протокол, например, Wi-Fi, Bluetooth или ZigBee, то координатор сети (ведущий модуль) организует прямую передачу данных из системы безопасности грузоподъемного крана (из какого-либо ее модуля) непосредственно в компьютер, или наоборот, из компьютера в систему безопасности.
При реализации передачи данных, спецификации физического слоя - Physical Layer (PHY) и протокол управления доступом - Wireless Medium Access Control (MAC) могут быть реализованы, в частности, по стандарту IEEE 802.15.4.
Основные функции PHY включают в себя контроль за состоянием и расходом энергии автономным источником питания модуля, оценку качества передачи данных, а также оценку параметров модема 1 для определения возможности совместной работы с внешними сетями. MAC, определяя сетевую маршрутизацию, обеспечивает возможность передачи информации в определенные временные интервалы, а также, при необходимости, автоматическое подтверждение приема данных модулями и реализацию функций безопасности - шифрования передаваемой информации.
Подход к организации открытой или самоорганизующейся сети основан на множественных типах сообщений. Каждый модуль передает информацию посредством фреймов (пакетов). Они могут быть четырех типов - управляющие (beacon frame), фреймы данных, фреймы подтверждения приема данных и фреймы команд МАС-уровня. Фреймы физического уровня содержат заголовок с синхропоследовательностью и информацией о размере фрейма и собственно поле данных - пакет МАС-уровня. Последний содержит заголовок со всей необходимой информацией о фрейме (тип, наличие криптозащиты, необходимость подтверждения приема и т.п.), адреса и идентификаторы устройств (модулей) - отправителя и получателя, собственно поле данных и проверочную контрольную сумму. Процедура обмена информацией может использовать пакеты подтверждения приема данных, если потеря пакета критична.
При этом, с целью снижения требований к вычислительным ресурсам микроконтроллера 2, реализация синхропоследовательности, разделителя начала кадра и проверочной контрольной суммы осуществляется цифровым трансивером 7 аппаратным способом. Трансивер 7 может также осуществлять шифрование и дешифрование передаваемой и принимаемой информации. Остальные функции MAC как ведущего модуля (координатора сети), так и ведомых модулей, реализуются программно микроконтроллером 2.
В аналоговом радиоканале (в приемнике 5 и передатчике 6) может быть использован метод широкополосной передачи с расширением спектра прямой последовательностью (DSSS), например с использованием 16-ти каналов с разносом по частоте. При этом поток немодулированных данных управляющей логикой 11 и цифровым трансивером 7 разбивается на группы, например по четыре бита. Каждая группа, в соответствии с выбранным стандартом, заменяется одной из 16 квазиортогональных последовательностей длиной 32 бита (чипа). При использовании квадратурной фазовой модуляции данных (QPSK), в передатчике 6 четные чипы квазиортогональной последовательности модулируют синфазный (I) канал, нечетные - квадратурный (Q) канал. Демодуляция принимаемых приемником 5 сигналов осуществляется в обратной последовательности аппаратным способом при помощи цифрового трансивера 7.
Для осуществления возможности обмена информацией с микроконтроллером 2 в потоковом режиме по стандартному последовательному интерфейсу SPI данные, передаваемые и принимаемые в пакетном режиме цифровым трансивером 7, при помощи управляющей логики 11 буферизируются в ОЗУ 10.
В процессе работы грузоподъемного крана, после завершения формирования наилучшей в данных условиях работы топологии беспроводной сети, модули системы безопасности при помощи датчиков 3 и микроконтроллеров 2 осуществляют измерение рабочих параметров грузоподъемного крана. Полученные данные от всех модулей передаются в микроконтроллер 2 одного из модулей системы безопасности, например в ведущий модуль или координатор сети, который осуществляет программную реализацию функций автоматической защиты, контроля и управления грузоподъемным краном. Эти функции могут быть также возложены на микроконтроллер 2 любого другого модуля или распределены между различными модулями системы безопасности.
Микроконтроллер 2 модуля, реализующего функции автоматической защиты, контроля и управления краном, работая по программе, которая разрабатывается при проектировании системы безопасности грузоподъемного крана и предварительно записывается в энергонезависимую память этого микроконтроллера 2, определяет текущую нагрузку крана и положение его грузоподъемного (стрелового) оборудования.
Допустимые режимы нагружения в виде грузовых характеристик крана и зона допустимых значений положения грузоподъемного (стрелового) оборудования крана, введенная крановщиком при задании параметров координатной защиты с помощью органов управления 3, расположенных на модуле-пульте управления краном, также хранятся в энергонезависимой памяти микроконтроллера 2.
После сравнения фактического нагружения крана с предельно-допустимым, а также сравнения фактического положения грузоподъемного оборудования с зоной допустимых положений, этот модуль формируют команды управления - блокировки механизмов крана, которые передаются на исполнительные устройства 4 этого модуля или передаются по беспроводной сети на исполнительные устройства 4, подключенные к другому модулю. В результате осуществляется автоматическая защита грузоподъемного крана от перегрузки по грузовому моменту и защита от столкновений стрелового оборудования с различными препятствиями (координатная защита).
Одновременно с реализацией этих функций ведущий модуль или координатор сети с использованием ведомых модулей вышеописанным образом осуществляет быстрое обнаружение и "интеграцию" в инфраструктуру сети системы безопасности грузоподъемного крана внешних модулей (узлов, датчиков, контроллеров и т.п.), обмен информацией с которыми используется для повышения безопасности выполнения грузоподъемных работ.
Известно, например, что работа грузоподъемного крана при скорости ветра, превышающей определенную заранее заданную величину, запрещена из соображений безопасности. Если в системе безопасности данного крана датчик (измеритель) скорости ветра отсутствует, то реализация этой защитной функции невозможна.
Однако если в непосредственной близости от этого грузоподъемного крана работает второй грузоподъемный кран, например башенный, оснащенный соответствующим модулем-измерителем скорости ветра, то в предложенном способе этот модуль-измеритель второго крана может быть использован для защиты обоих кранов.
В этом случае координатор сети первого крана подключает к своей беспроводной сети этот модуль-измеритель скорости ветра. Если на втором кране также реализована сеть беспроводной передачи информации, то реализуется объединение этих двух сетей в единую беспроводную сеть.
Координатор сети по адресу-идентификатору выявляет назначение внешнего модуля (в данном случае измерителя скорости ветра) и передает принятую от него информацию в один из модулей, микроконтроллер 2 которого осуществляет программную реализацию дополнительной функции отключения грузоподъемного крана или его перевода в режим флюгера при скорости ветра, превышающей заранее установленную величину. Этим микроконтроллером 2 может быть, в частности, и микроконтроллер ведущего модуля (координатора сети). Программа работы этого микроконтроллера в режиме формирования сигналов управления - блокировки работы грузоподъемного крана или перевода крана в режим флюгера, заранее разработана при проектировании системы безопасности и записана в энергонезависимой памяти этого микроконтроллера 2. В этой же памяти записаны значения максимальной скорости ветра, при превышении которой осуществляют формирование этих сигналов, передающихся на исполнительные устройства 4.
Если модуль-измеритель скорости ветра расположен не на другом кране, а на каком-либо другом мобильном или стационарном объекте, то принцип работы описанного устройства не меняется.
Аналогичным образом осуществляется также дополнительная защита крана, если дополнительный модуль является, например, модулем-датчиком температуры. В этом случае описанным образом реализуется автоматическая блокировка работы крана при температуре окружающей среды ниже минимально допустимой. При этом один модуль-датчик температуры также может использоваться для защиты нескольких одновременно работающих грузоподъемных кранов.
Одновременная работа нескольких грузоподъемных кранов предопределяет актуальность реализации их защиты от столкновений. При использовании предложенного способа, эта задача эффективно решается путем объединения беспроводных сетей систем безопасности двух и более грузоподъемных кранов. При этом алгоритмы и программы работы системы безопасности в режиме защиты кранов от столкновений также заранее записываются в память микроконтроллера 2 того модуля, который реализует эту функцию (который назначен координатором сети для реализации этой функции путем передачи соответствующих команд управления МАС-уровня).
В этом случае информационные сигналы внешнего модуля-измерителя пространственного положения другого грузоподъемного крана или его стрелы используют в этом микроконтроллере 2 для формирования сигналов управления исполнительными устройствами 4 грузоподъемного крана в режиме его защиты от столкновений с другим грузоподъемным краном в соответствии с предварительно определенной и записанной в его энергонезависимой памяти программой, определяющей порядок формирования этих сигналов управления. При этом для определения расстояния между двумя грузоподъемными кранами (или между краном и каким-либо препятствием) могут использоваться приемники сигналов глобальной спутниковой навигации типа «GPS» или «Глонасс», а для измерения угла азимута - измерители направления магнитного поля Земли. При необходимости, для реализации защиты кранов от столкновений, аналогичным образом дополнительно используется беспроводная передача информации от внешних модулей-измерителей длины стрелы другого грузоподъемного крана, угла наклона его стрелы и т.д., которые ведущим модулем также подключаются к беспроводной сети.
В итоге, благодаря открытой или самоорганизующейся беспроводной сети системы безопасности грузоподъемного крана, осуществляется реализация дополнительных функций его защиты с использованием информации о состоянии других кранов, других мобильных объектов или информации о состоянии внешней среды, в частности реализуется универсальная автоматическая защита кранов от столкновений.
Внешним модулем, подключаемым ведущим модулем к беспроводной сети, может быть пульт, находящийся в распоряжении стропальщика или другого лица, находящегося вблизи грузоподъемного крана. Этот внешний модуль-пульт снабжен органами управления 3, с помощью которых формируются сигналы управления грузоподъемным краном, которые передаются по сети и используются для включения или отключения механизмов или отдельных движений грузоподъемного крана в соответствии с предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти микроконтроллера 2 какого-либо модуля порядком (программой) использования этих сигналов при формировании сигналов управления исполнительными устройствами 4. Одновременно сигналы управления исполнительными устройствами 4 формируются крановщиком с помощью органов управления 3, расположенных в кабине грузоподъемного крана на модуле-пульте управления крановщика.
Алгоритмы совместного управления грузоподъемным краном крановщиком и стропальщиком (или другим лицом, находящимся вблизи работающего крана), реализуемые программно микроконтроллером 2, могут предусматривать либо объединение этих сигналов управления по схеме ИЛИ, т.е. предусматривать возможность включения любого механизма крана как крановщиком, так и стропальщиком (или другим лицом, находящимся вблизи работающего крана). Либо сигналы управления грузоподъемным краном, которые принимают по беспроводной сети с внешнего модуля-пульта, могут использоваться только для блокировки (отключения) отдельных механизмов или отдельных движений грузоподъемного крана, ранее включенных крановщиком. Т.е. в последнем случае, с целью повышения безопасности работы грузоподъемного крана, стропальщик может только блокировать работу крана, а право включения его механизмов предоставлено только крановщику.
Аналогичным образом реализуется также дистанционное управление стропальщиком рабочим освещением (фарами), звуковым сигналом и другими устройствами и механизмами крана.
Дополнительно внешний модуль-пульт стропальщика (или другого лица, находящегося вблизи грузоподъемного крана), а также модуль, расположенный в кабине грузоподъемного крана, могут содержать устройства передачи и приема информационных или речевых сообщений, с помощью которых осуществляется симплексный или дуплексный (поочередный или одновременный) обмен информации по беспроводной сети между стропальщиком и крановщиком. В случае передачи информационных световых или звуковых сигналов, эти два модуля снабжаются соответствующими органами управления 3 (кнопками, клавишами, переключателями), а также световыми или звуковыми сигнализаторами, а в случае реализации обмена речевыми сообщениями - соответствующими акустическими устройствами (микрофоном, громкоговорителем, звуковыми усилителями). При этом процедура обмена информацией отличается от процедуры передачи информации от модулей-датчиков только наличием аналого-цифрового и цифроаналогового преобразований звуковых (речевых) сигналов.
Применение открытой или самоорганизующейся беспроводной сети позволяет также реализовать управление крановщиком или стропальщиком стационарно расположенными устройствами, например внешним освещением рабочей зоны грузоподъемного крана или внешними сигнализаторами. В этом случае внешний модуль, автоматически подключаемый координатором сети (ведущим модулем системы безопасности грузоподъемного крана), представляет из себя контроллер стационарно расположенных устройств или объектов, обеспечивающий прием сигналов управления этими устройствами от беспроводной сети. Сигналы управления этими внешними устройствами или объектами могут формироваться как крановщиком (с помощью органов управления 3, расположенных на модуле в кабине грузоподъемного крана), так и стропальщиком (или другим лицом, находящимся вблизи грузоподъемного крана) с помощью переданного в его распоряжение внешнего модуля-пульта, снабженного аналогичными органами управления 3. При этом необходимый алгоритм управления также реализуется программно микроконтроллером 2 того модуля, которому, как и в предыдущих случаях, координатор сети передает управление этими внешними устройствами и в который поступают соответствующие сигналы с органов управления 3 от модулей-пультов крановщика и стропальщика.
Алгоритмы совместного управления крановщиком и стропальщиком (или другим лицом, находящимся вблизи работающего крана) этими внешними устройствами могут предусматривать, в частности, объединение этих сигналов управления по схеме ИЛИ, т.е. включение любого внешнего устройства как крановщиком, так и стропальщиком.
Внешний модуль, подключаемый ведущим модулем к беспроводной сети, может быть выполнен в виде индивидуального (личного) автономного ключа (метки) крановщика или стропальщика, например, в виде брелка, который выдается крановщику или стропальщику и подтверждает их право выполнения грузоподъемных работ. В память микроконтроллера 2 этого личного ключа (метки) предварительно записывается индивидуальный личный идентификационный код крановщика или стропальщика, а в память микроконтроллера 2 другого расположенного на грузоподъемном кране модуля, на который ведущим модулем возложена задача аутентификации крановщика или стропальщика, записываются соответствующие коды-образцы. При этом в цифровые сигналы с последовательным форматом, передаваемые по беспроводной сети этим модулями-ключами (метками), включают идентификационный код этого модуля (индивидуальный код крановщика или стропальщика), а после приема этих сигналов в модуле на грузоподъемном кране, осуществляют сравнение этого кода с кодами-образцами. В случае несовпадения этих кодов, микроконтроллер формируют предупреждающий сигнал или сигнал управления исполнительными устройствами 4, блокирующий работу грузоподъемного крана. Благодаря этому предотвращается несанкционированный доступ к управлению краном случайных лиц, т.е. крановщика и (или) стропальщика, не имеющего права на выполнение таких работ.
Открытая или самоорганизующаяся беспроводная сеть системы безопасности грузоподъемного крана позволяет также реализовать ее автоматическую дистанционную настройку (подстройку, проверку, перепрограммирование), например автоматически настроить параметры защиты при выезде грузоподъемного крана с места стоянки (из бокса, гаража и т.п.) в зависимости от заранее установленного плана производства работ и каких-либо внешних условий, в частности автоматически установить необходимый рабочий диапазон системы защиты от приближения к ЛЭП в зависимости от того, в зоне какой ЛЭП предстоит выполнять грузоподъемные работы, ограничить грузоподъемность, скорость в транспортном режиме или высоту подъема стрелы, в зависимости от температуры окружающего воздуха, скорости ветра, наличия тумана и т.д.
В этом случае внешний модуль реализуется в виде мобильного или стационарного программатора, от которого в беспроводную сеть передают сигналы дистанционной настройки (подстройки, перепрограммирования) параметров системы безопасности грузоподъемного крана. Эти сигналы принимают в одном из модулей системы безопасности грузоподъемного крана (в ведущем модуле или в каком-либо другом модуле, назначенном координатором сети), и используют в соответствии с порядком настройки системы безопасности, предварительно определенным, например при проектировании системы безопасности, и записанным в энергонезависимой памяти программ микроконтроллера 2 этого модуля. Сигналы настройки определяют при разработке плана производства работ грузоподъемным краном или путем измерения параметров внешней среды, в частности ее температуры и скорости ветра, и после их передачи в указанный модуль системы безопасности используют для ограничения какого-либо рабочего параметра грузоподъемного крана. Алгоритмы этого ограничения и, соответственно, формирования сигналов управления исполнительными устройствами 4 грузоподъемного крана также разрабатывают при проектировании системы безопасности, например, исходя из установленных правил безопасной эксплуатации грузоподъемного крана, и также записывают в энергонезависимую память программ микроконтроллера 2 соответствующего модуля.
Дополнительно в предложенном техническом решении обеспечивается автоматическое бесконтактное считывание данных регистратора параметров, встроенного в систему безопасности, а также данных самодиагностики системы безопасности или диагностики грузоподъемного крана в целом. Причем это считывание может осуществляться автоматически без участия обслуживающего персонала, например при возвращении грузоподъемного крана после рабочей смены на место стоянки.
Для реализации такого считывания внешний модуль реализуется в виде бесконтактного устройства считывания данных регистратора параметров грузоподъемного крана. От этого устройства в беспроводную сеть передаются сигналы управления передачей данных встроенного в систему безопасности регистратора параметров, которые принимаются в одном из модулей системы безопасности грузоподъемного крана и используются в соответствии с предварительно определенным при проектировании системы безопасности и записанным в энергонезависимую память микроконтроллера 2 этого модуля порядком (алгоритмом или программой) считывания данных регистратора параметров. Эти данные по беспроводной сети передаются в указанный внешний модуль - бесконтактное устройство считывания, где записываются в его энергонезависимую память, например в отдельный блок Flash-памяти, подключенный к микроконтроллеру 2, и далее используются для проработки профилактических мер по снижению аварийности работы крана. Причем в качестве бесконтактного устройства считывания может быть использован компьютер или специальный терминал, предварительно оснащенный устройством бесконтактного чтения/записи данных, совместимым по протоколу с протоколом беспроводной сети грузоподъемного крана, например Wi-Fi, Bluetooth или ZigBee.
Аналогичным образом осуществляется автоматическое дистанционное считывание данных встроенной системы диагностики системы безопасности или диагностики грузоподъемного крана в целом. В последнем случае эти данные могут быть использованы для исключения допуска к работе крана с какой-либо технической неисправностью, в том числе путем передачи по беспроводной сети на грузоподъемный кран сигналов блокировки работы крана. При этом процедура передачи сигналов блокировки работы крана не отличается от вышеописанной процедуры передачи сигналов управления краном от модуля-пульта стропальщика.
Реализация предложенного технического решения позволяет существенно повысить безопасность выполнения грузоподъемных работ за счет реализации дополнительных функций защиты грузоподъемного крана с использованием информации от внешних датчиков, расположенных на мобильных или стационарных объектах, в частности обеспечить защиту кранов от столкновений, реализовать одновременное совместное управления краном как крановщиком, так и стропальщиком, обеспечить управление внешними устройствами, например стационарным освещением рабочей площадки, организовать обмен сообщениями между стропальщиком и крановщиком, исключить несанкционированный доступ к управлению краном, обеспечить автоматическую дистанционную настройку системы безопасности крана, а также автоматическое дистанционное считывание данных регистратора параметров грузоподъемного крана и сигналов диагностики его технического состояния.
Источники информации
1. Заявка JP 2000086156 А, МПК 7 В 66 С 13/40, H 01 Q 3/02, 28.03.2000.
2. Патент US 3969714 А, МПК 2 G 08 B 21/00, 13.07.1976.
3. Заявка RU 2002130849 A, МПК 7 В 66 С 13/18, 15/00, 23/88, 20.06.2003.
Изобретение относится к области подъемно-транспортного машиностроения. Сущность предложенного способа заключается в том, что беспроводную передачу информации в системе безопасности грузоподъемного крана осуществляют посредством самоорганизующейся сети. В процессе работы крана каким-либо модулем его системы безопасности путем приема сигнала выявляется наличие внешнего модуля, расположенного вне грузоподъемного крана с последующим автоматическим подключением этого модуля координатором сети (ведущим модулем) к беспроводной сети системы безопасности крана и соответственно с последующим приемом информации от этого модуля или с передачей данных в него. В зависимости от вида внешнего подключаемого модуля реализуются соответствующие дополнительные функции автоматической защиты, контроля и управления. Изобретение позволяет повысить безопасность выполнения грузоподъемных работ. 19 з.п. ф-лы, 1 ил.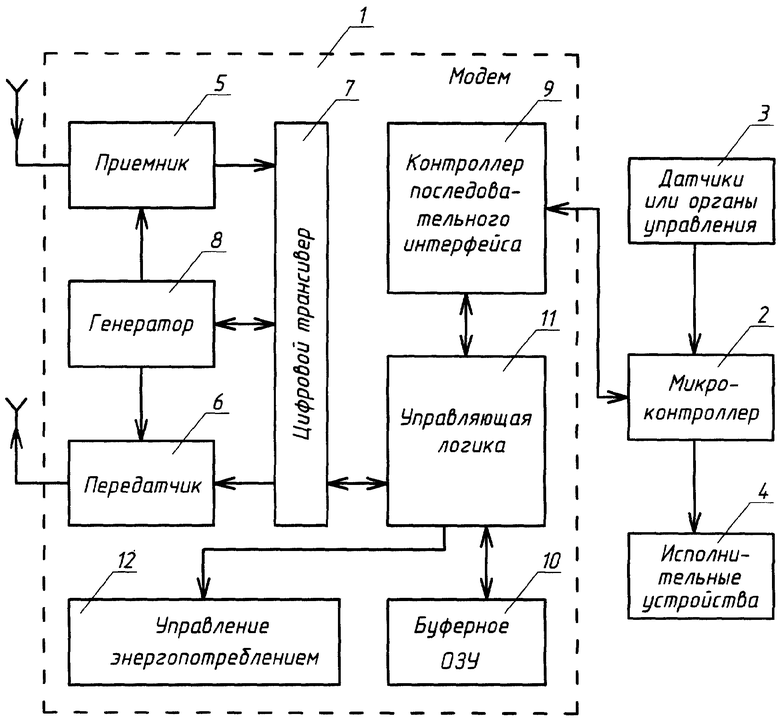
| RU 2002130849 А, 20.06.2003 | |||
| RU 2002108192 A, 20.06.2003 | |||
| US 5730305 A, 24.03.1998 | |||
| JP 2000086156 A, 28.03.2000. |

