Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам управления и защиты грузоподъемных кранов.
Известен способ управления и защиты грузоподъемных кранов, в котором инициирование и останов подъема крюковой обоймы производится оператором (крановщиком), который производит учет установки крюковой обоймы над грузом, возможный прогиб стрелы и динамики перемещающегося груза интуитивно в соответствии со своей квалификацией. Если в момент отрыва груза от земли канаты, на которых висит груз, не занимает вертикального положения, груз начинает раскачиваться, что вызывает потери времени на гашение колебаний, а в некоторых случаях нарушение безопасной работы в результате соударения груза с конструкцией крана или другими объектами на стройплощадке. Гашение колебаний груза производится путем отключения приводов механизмов крана с незначительной выдержкой времени, предназначенной для исключения влияния динамических помех [1].
Недостатком этого способа является то, что при управлении краном не учитывается динамика перемещающегося груза, так как колебания груза имеют низкую частоту, отфильтровать которые невозможно. Для этого понадобился бы фильтр с большой постоянной времени (несколько секунд), приводящий к недопустимо большой задержке срабатывания устройств защиты. Наличие же колебаний груза приводит к снижению производительности крана и энергетическими потерями.
Известен также способ предотвращения раскачивания груза при его подъеме, базирующийся на стабилизации положения точки его подвеса в горизонтально плоскости с использованием регулирования по углу отклонения грузовых канатов от вертикального положения. В этом способе при выявлении изменения нагрузки и отклонения канатов от вертикального положения на установленный угол, формируется сигнал разрешения маневра стрелой [2].
На стреловом грузоподъемном кране отклонение канатов от вертикального положения при подъеме груза возникает за счет прогиба стрелы, приводящего к увеличению вылета. В свою очередь, уменьшение вылета для возврата канатов в вертикальное положение возможно путем телескопирования или подъема стрелы (увеличения угла ее наклона).
Однако прогиб возникает при достаточно существенном нагружении стрелы, при котором ее телескопирование, как правило, запрещено. Уменьшение вылета путем подъема стрелы при натянутом грузовом канате невозможно без отрыва груза от земли, т.к. подъем стрелы приводит к увеличению точки подвеса грузозахватного органа к стреле. Поэтому в известном способе в момент подъема груза необходимо переключение привоза грузовой лебедки с подъема на опускание грузозахватного органа, при котором происходит ослабление грузового каната и становится возможным уменьшение вылета.
Это приводит к дополнительным затратам времени, приводящим к снижению производительности работы крана (к увеличению его рабочего цикла), а также к снижению эффективности гашения колебаний груза за счет задержек включения и инерционности привода грузовой лебедки.
Известен также способ предотвращения раскачивания груза при его подъеме и перемещении грузоподъемным краном путем контроля положения подвижного оборудования крана, инерционных показателей оборудования и его фактических скоростей и ускорений посредством датчиков и формирования сигналов управления приводами механизмов перемещения оборудования крана после обработки сигналов датчиков цифровым вычислительным устройством. Отключение приводов перемещения механизмов при этом осуществляется либо по фактору ограничения перемещений, либо по фактору их перегрузки. Способ предполагает установку датчиков длины каната и переключателя кратности полиспаста, сигналы которых используются для определения периода раскачивания подвешенного груза и соответствующего выбора режима управления приводами механизмов крана, при котором обеспечивается гашение колебаний груза в процессе его перемещения и останова [3].
В этом способе информация о параметрах или координатах пространственного положения конечной точки перемещения груза относительно грузоподъемного крана перед началом подъема и перемещения груза в цифровое вычислительное устройство не вводится. Соответственно, положение конечной точки перемещения груза не учитывается при формировании сигналов управления приводами, что предопределяет необходимость как минимизации колебаний груза на всех стадиях рабочего цикла, так и вмешательства оператора в управление приводами перемещения механизмов крана с целью снижения скорости перемещения груза на конечной части траектории его перемещения. Это приводит к снижению средней скорости перемещения груза и, соответственно, к снижению производительности работы крана (к увеличению его рабочего цикла). Кроме того, формирование оператором сигналов остановки приводов перемещения груза в ручном режиме приводит к снижению эффективности гашения колебаний груза за счет невозможности обеспечить нулевую скорость перемещения груза в конечной точке его перемещения.
Основными техническими результатами, на достижение которых направлено заявленное изобретение, являются повышение производительности работы грузоподъемного крана (сокращение его рабочего цикла) и эффективности предотвращения раскачивания груза.
Дополнительными техническими результатами являются снижение энергоемкости процесса подъема и перемещения груза и увеличение ресурса работы приводов за счет сокращения количества их включений и динамических нагрузок на кран.
Эти результаты достигаются тем, что в способе предотвращения раскачивания груза на гибком подвесе при его подъеме грузоподъемным краном, заключающемся в том, что путем воздействия на органы управления краном формируют сигналы управления приводами механизмов перемещения стрелы и/или грузовой тележки и грузозахватного органа, подвешенного на грузовом канате к стреле или к грузовой тележке грузоподъемного крана, после перемещения грузозахватного органа к грузу, подлежащему подъему, с использованием цифрового вычислительного устройства осуществляют прогноз величины горизонтального перемещения точки или узла подвеса грузового каната к стреле или к грузовой тележке под воздействием веса груза, подлежащего подъему, а перед включением привода подъема грузозахватного органа или в начальной стадии этого подъема формируют сигналы управления приводами механизмов перемещения стрелы и/или грузовой тележки из условия перемещения указанной точки или узла подвеса на прогнозируемую величину, соответствующую уменьшению отклонения грузового каната от вертикального положения в момент отрыва груза от земли при его подъеме.
При этом, в частности:
- прогноз величины смещения точки подвеса грузового каната под воздействием веса груза осуществляют с использованием математической модели крана и выходных сигналов датчиков его пространственного положения;
- сигналы управления приводами механизмов крана для перемещения точки или узла подвеса на прогнозируемую величину формируют посредством цифрового вычислительного устройства или оператором крана с использованием информационных сигналов, предоставляемых оператору;
- за прогнозируемую величину горизонтального перемещения принимают увеличение вылета грузозахватного органа под воздействием веса груза, а сигналы управления приводами механизмов крана перед подъемом грузозахватного органа или в начальной стадии этого подъема формируют из условия уменьшения вылета на прогнозируемую величину путем подъема стрелы, ее втягивания или перемещения грузовой тележки;
- величину веса груза, используемую для прогноза величины горизонтального перемещения точки или узла подвеса грузового каната под воздействием веса этого груза, вводят в цифровое вычислительное устройство оператором, из внешнего запоминающего устройства, со стационарного диспетчерского поста или путем считывания информации с устройства идентификации груза, либо определяют эту величину цифровым вычислительным устройством с использованием выходных сигналов датчиков нагрузки грузоподъемного крана как среднюю величину массы однотипных грузов, поднимаемых и перемещаемых грузоподъемным краном в различных рабочих циклах.
Во втором варианте способа предотвращения раскачивания груза на гибком подвесе, заключающимся в том, что путем воздействия на орган управления грузоподъемным краном формируют сигнал запуска приводов механизмов перемещения стрелы, грузовой тележки и/или грузозахватного органа, посредством датчиков контролируют нагрузку грузоподъемного крана и пространственное положение его механизмов, после чего с помощью цифрового вычислительного устройства формируют сигналы управления указанными приводами из условия реализации траектории перемещения груза, отвечающей требованиям безопасности работы крана и предотвращения раскачивания груза в конечной точке его перемещения, с использованием выходных сигналов указанных датчиков и информации о статических и динамических параметрах крана, предварительно записанной в запоминающее устройство цифрового вычислительного устройства, указанные технические результаты достигаются тем, что в цифровое вычислительное устройство дополнительно вводят параметры или координаты пространственного положения конечной точки перемещения груза относительно грузоподъемного крана и учитывают их при формировании указанных сигналов управления приводами.
При этом, в частности:
- формирование сигналов управления приводами механизмов грузоподъемного крана осуществляют с использованием математической модели крана;
- в ручном режиме формируют сигналы ограничения скорости работы приводов механизмов крана, скорости перемещения и/или пространственного положения самих механизмов, включая грузозахватный орган, и учитывают эти сигналы в цифровом вычислительном устройстве при формировании сигналов управления приводами, задающими траекторию перемещения груза;
- параметры или координаты пространственного положения конечной точки перемещения груза вводят в цифровое вычислительное устройство оператором, из внешнего запоминающего устройства или со стационарного диспетчерского поста, либо путем считывания информации с устройства позиционирования, установленного в зоне конечной точки перемещения груза;
- в цифровое вычислительное устройство вводят допустимые значения параметров, характеризующих нагрузку и пространственное положение стрелы, грузовой тележки и грузозахватного органа крана, а при формировании сигналов управления приводами накладывают ограничения на их величины из условия предотвращения превышения текущих значений указанных параметров работы крана их допустимых значений;
- контролируют длину каната и кратность запасовки грузового полиспаста, на основании которых вычисляют высоту подвеса груза и период его раскачивания и учитывают их при формировании сигналов управления приводами механизмов грузоподъемного крана;
- дополнительно контролируют нагрузку приводов механизмов крана и, в случае необходимости, скорость ветра, и учитывают их величины при формировании сигналов управления приводами.
Реализация первого варианта предложенного способа предотвращения раскачивания груза на гибком подвесе обеспечивает упреждающее перемещение точки подвеса в положение, из которого эта точка в процессе подъема груза под воздействием его веса занимает положение с нулевым отклонением грузовых канатов от вертикального положения без прерывания процесса подъема груза.
Учет координат пространственного положения конечной точки перемещения груза относительно грузоподъемного крана во втором варианте предложенного способа обеспечивает минимально возможное время подъема и перемещения груза и отсутствие его раскачивания в конечной точке траектории перемещения.
Одновременно исключаются излишние переключения сигналов управления приводами, что обеспечивает снижение затрат энергии на подъем и перемещение груза и увеличение ресурса работы приводов грузоподъемного крана.
Поэтому достижение указанных технических результатов находится в прямой причинно-следственной связи с отличительными признаками заявленного изобретения.
На чертеже в качестве примера приведена функциональная схема системы управления и защиты грузоподъемного крана, реализующей предложенный способ предотвращения раскачивания груза на гибком подвесе.
Система содержит цифровое вычислительное устройство 1, именуемое также электронным блоком, контроллером, блоком индикации, блоком обработки данных, цифровым вычислителем и т.п., и датчики параметров работы грузоподъемного крана 2. Цифровое вычислительное устройство 1 выполнено на основе микроконтроллера 3, к которому подключены органы управления вычислительным устройством (кнопки, клавиши) 4, индикаторы (светодиодные, символьные жидкокристаллические и т.п.) 5, энергонезависимое запоминающее устройство (микросхемы Flash-памяти) 6 и устройство ввода/вывода информации 7.
Запоминающее устройство 6 выполнено с возможностью хранения данных, необходимых для реализации функций управления и защиты грузоподъемного крана, а также данных встроенного регистратора параметров его работы. Для повышения информативности регистрации в системе могут быть установлены часы реального времени, подключенные к микроконтроллеру 3.
В случае применения в устройстве датчиков 2 с аналоговыми выходами, устройство ввода/вывода информации 7 содержит аналого-цифровой преобразователь, а при применении цифровых датчиков - трансивер или контроллер мультиплексного канала обмена данными, в частности последовательного интерфейса типа CAN (Control Area Network) или LIN (Local Interconnection Network). Возможно также подключение датчиков 2 с использованием в устройстве ввода/вывода информации 7 беспроводного интерфейса (ZigBee, Bluetooth, Wi-Fi и т.д.).
Выходное устройство 8 выполнено, в частности, в виде силового электронного блока с дискретными, пропорциональными или широтно-импульсными выходными сигналами. Его вход или двунаправленные входы/выходы подключены к устройству ввода/вывода информации 7 при помощи отдельных проводов или мультиплексного канала обмена данными. Выходное устройство 8 может быть выполнено на основе микроконтроллера и подключено к этому мультиплексному каналу обмена данными аналогично подключению датчиков 2. Кроме того, отдельные датчики 2, включая концевые выключатели и датчики аналоговых параметров, могут быть подключены непосредственно к выходному устройству 8.
Выходное устройство 8 может содержать электромагнитные пускатели или электромагнитные клапаны, включенные в гидравлическую или электрическую систему управления краном.
Датчики 2 включают в себя, в частности, датчики пространственного положения стрелы и/или грузовой тележки и грузозахватного органа крана (датчик длины стрелы 10, датчик угла наклона стрелы 11, датчик угла азимута 12, датчик высоты подъема грузозахватного органа и т.д.), датчик нагрузки грузоподъемного крана 13 (тензометрический датчик усилия в грузовом или стреловом канате или тензометрические датчики давления в гидроцилиндре подъема стрелы). Система может содержать также различные дополнительные датчики 14, к которым относятся датчик угла наклона оголовка стрелы, датчик предельного подъема грузозахватного органа (концевой выключатель), датчик приближения к линии электропередачи, датчики перемещений органов управления краном 16, датчик хода грузовой лебедки, датчик скорости ветра и т.п. Отдельные датчики, показанные на чертеже, могут отсутствовать. Конкретный набор датчиков зависит от конструкции конкретного грузоподъемного крана и варианта реализации предложенного способа.
В состав системы могут также входить приемник сигналов устройства позиционирования или идентификации груза, приемник сигналов со стационарного поста управления, устройство считывания внешнего запоминающего устройства и другие устройства, подключенные к устройству ввода/вывода информации 7 (условно не показаны).
Управление (пуск, остановка и/или регулирование скорости) приводами исполнительных механизмов крана 15 осуществляется с помощью органов управления грузоподъемным краном 16 через цифровое вычислительное устройство 1. С помощью органов управления 16 крановщик, в общем случае, инициируют начало движения механизмов крана, задает направления и режимы этих движений, в частности их скорости, и, при необходимости, вводит ограничения на работу приводов при изменении каких-либо условий работы грузоподъемного крана. В отдельных случаях может осуществляться непосредственное управление этими приводами с использованием гидравлических, электрических или механических средств. Например, пуск проводов может осуществляться с помощью гидравлических распределителей с ручным управлением, а ограничение или блокирование их движений - с помощью электрогидравлических клапанов, соединенных с выходным устройством 8 или входящих в его состав.
Система управления и защиты грузоподъемного крана, реализующая предложенный способ предотвращения раскачивания груза, работает следующим образом.
Перед началом работы крана, крановщик (оператор) при помощи органов управления 4 цифрового вычислительного устройства 1 вводит в микроконтроллер 3 параметры, определяющие режимы работы крана - положение выдвижных опор, кратность запасовки грузового полиспаста, наличие, длину и угол наклона гуська и т.д., если для данной конструкции крана ввод этих параметров является необходимым. Введенные параметры сохраняются в энергонезависимом (Flash) запоминающем устройстве 6 или в памяти (в EEPROM) микроконтроллера 3.
Зона допустимых значений положения стрелового оборудования крана вводится крановщиком при задании параметров координатной защиты при помощи органов управления 4 и также сохраняется в памяти микроконтроллера 3 или в запоминающем устройстве 6. В этой же памяти хранятся предельно допустимые значения параметров, характеризующих нагрузку крана и представленных, например, в виде его грузовых характеристик.
Дополнительно расчетным, экспериментальным (опытным) путем или путем экспертных оценок, определяются ограничения на работу приводов 15 грузоподъемного крана из условия обеспечения безопасности его работы и производительности выполнения грузоподъемных работ. Эти ограничения определяются в виде логических условий разрешения включения или отключения (блокирования) работы приводов, требований к последовательности включения (к приоритету) работы приводов, в виде численных значений параметров работы крана, условий его работы и параметров технического состояния механизмов крана, при которых начинают действовать (активируются) эти ограничения, либо в виде коэффициентов функциональных зависимостей, описывающие условия введения и интенсивность этих ограничений. Величины (параметры), логические условия и характеристики ограничения на работу приводов грузоподъемного крана также записываются в запоминающее устройство 6 или в память (в EEPROM) микроконтроллера 3.
Микроконтроллер 3 работает по программе, записанной в его памяти или в запоминающем устройстве 6, и через устройство ввода/вывода информации 7 по мультиплексному каналу обмена данными или по отдельным линиям связи получает от датчиков 2 значения параметров работы крана. На основании этих значений микроконтроллер 3 определяет пространственное положение механизмов и нагрузку крана. Для определения текущей нагрузки крана и/или текущего положения его стрелы, грузовой каретки или грузозахватного органа, в общем случае, используется математическая модель крана, также записанная в памяти микроконтроллера 3 или в запоминающем устройстве 6.
При необходимости осуществляются преобразования выходных сигналов датчиков 2. Это имеет место в случае, когда текущая нагрузка крана и/или положение его стрелы или грузозахватного органа измеряются косвенным образом, например, при определении нагрузки стрелового гидравлического крана по давлениям в штоковой и поршневой полостях гидроцилиндра подъема стрелы.
Инициирование формирования сигналов управления приводами 15 крана осуществляется путем перемещения крановщиком органов управления (рукояток, рычагов и т.п.) 16, например электрических джойстиков, в соответствующих направлениях. Действительные сигналы управления приводами 15 формируются цифровым вычислительным устройством после получения сигналов с органов управления краном 16. Уровни этих сигналов либо определяются микроконтроллером 3, либо формируются путем ограничений управляющих воздействий оператора на органы управления краном 16.
Способ предотвращения раскачивания груза на этапе его подъема предполагает перевод точки подвеса грузовых канатов перед подъемом груза не над грузом, а то положение, при котором, после деформации стрелы и/или башни крана при работе привода грузовой лебедки на подъем груза, грузовые канаты займут вертикальное в момент отрыва груза от земли.
После того как оператор (крановщик) начнет подъем грузозахватного органа (крюковой обоймы) с грузом, кран начнет нагружаться, в результате чего стрела прогнется, изменяя вылет и положение грузовых канатов относительно первоначального положения. Задачей системы управления является такая первоначальная установка точки подвеса грузовых канатов (оголовка стрелы в случае крана с маховой стрелой или каретки в случае башенного крана с балочной стрелой), при которой эта точка, вследствие прогиба стрелы под воздействием веса поднимаемого груза, переместится в положение, при котором в момент отрыва груза от земли грузовые канаты вертикальны и, соответственно, раскачивание груза отсутствует.
Таким образом, реализация этого способа включает следующие этапы:
а) Грузозахватный орган (крюковая обойма) под управлением оператора подводится к грузу, проводится его строповка. Точка подвеса грузовых канатов в этом случае находится над грузом, а грузовые канаты имеют вертикальное положение. Подвешенная на канатах крюковая обойма в этом случае выполняет функции отвеса и позволяет оператору (крановщику) установить точку подвеса над грузом с достаточно высокой точностью.
в) Цифровое вычислительное устройство расчетным путем с использованием математической модели крана или иным способом осуществляет прогноз величины горизонтального перемещения точки или узла подвеса грузового каната к стреле или к грузовой тележке под воздействием веса груза, подлежащего подъему - определение изменения вылета, которое должно произойти вследствие деформации стрелового оборудования крана при подъеме груза.
в) Цифровое вычислительное устройство по команде оператора формирует сигналы управления приводом механизма телескопирования, подъема стрелы или перемещения грузовой тележки крана, обеспечивая автоматическое уменьшение вылета на прогнозируемую величину, либо формирует для оператора информационные сигналы, отображаемые на индикаторах 5 и позволяющие осуществить уменьшение вылета при управлении краном в ручном режиме с помощью органов 16. Грузовые канаты при этом занимают положение с небольшим наклоном, зависящим от жесткости и пространственного положения стрелового оборудования крана и веса груза, который предстоит поднять.
г) Груз находится на земле, нагрузка на кран отсутствует, оператор (крановщик) инициирует подъем грузозахватного органа путем включения привода грузовой лебедки.
д) При подъеме груза в результате нагружения крана происходит деформация стрелового оборудования крана. Точка или узел подвеса грузового каната к стреле или к грузовой тележке смещается в сторону груза.
В результате этого, в момент отрыва груза от земли грузовые канаты занимают вертикальное положение. Раскачивание груза при его подъеме не происходит.
Величину веса груза, используемую цифровым вычислительным устройством 1 для прогноза величины горизонтального перемещения точки или узла подвеса грузового каната под воздействием веса этого груза, вводят в цифровое вычислительное устройство оператором с помощью органов управления 4, или считывают из внешнего запоминающего устройства, или передают на грузоподъемный кран со стационарного диспетчерского поста или с устройства идентификации груза, прикрепленного к этому грузу.
Для более эффективного управления грузоподъемным краном, в том числе для исключения раскачивания груза, целесообразно с помощью цифрового вычислительного устройства 1 сформировать и реализовать оптимальную траекторию подъема/опускания и перемещения груза. Для этого в микроконтроллер 3 цифрового вычислительного устройства 1 вводят параметры или координаты пространственного положения конечной точки перемещения груза относительно грузоподъемного крана. Они учитываются при формировании сигналов управления приводами таким образом, чтобы подъем/опускание и перемещение груза осуществлялись с минимальными затратами энергии или времени (в зависимости от приоритета, выбранного, например, оператором грузоподъемного крана), а горизонтальная и вертикальная скорости перемещения груза в момент достижения им конечной точки были равны нулю.
Параметры или координаты пространственного положения конечной точки перемещения груза вводят в цифровое вычислительное устройство 1 оператором в ручном режиме с помощью органов управлении 4, или записывают из внешнего запоминающего устройства, например, с электронной технологической карты производства погрузочно-разгрузочных работ, или передают в вычислительное устройство 1 со стационарного диспетчерского поста. Возможно также считывание этой информации с устройства позиционирования, установленного, например, рабочим на строительной площадке (стропальщиком), в зоне конечной точки перемещения груза.
Первоначально оператор путем воздействия на орган управления грузоподъемным краном 16, формирует сигнал запуска приводов механизмов перемещения стрелы, грузовой тележки, и/или грузозахватного органа, т.е. инициализирует начало движения. Дальнейшее формирование сигналов управления приводами исполнительных механизмов 15 осуществляется цифровым вычислительным устройством 1 с использованием математической модели крана. Управление реализуется с учетом предельно допустимых значений параметров и ограничений на работу приводов, ограничений по координатной защите и по допустимым нагрузкам крана в целом и его отдельных механизмов, а также информации о статических и динамических параметрах крана предварительно введенных в запоминающее устройство 6 или в память микроконтроллера 3. В процессе движения груза микроконтроллер 3, с использованием выходных сигналов датчиков 2, в реальном масштабе времени отслеживает текущее пространственное положение и нагрузку крана и его механизмов и, в случае необходимости, осуществляет изменение сигналов управления приводами 15, обеспечивая безопасное и эффективное управление краном.
При этом оператор визуально и с помощью индикаторов 5 контролирует работу крана. При необходимости, в частности, при возникновении непредвиденных ситуаций, оператор с помощью органов управления краном 16 останавливает работу крана или вмешивается в процесс управления. Путем воздействия на органы управления грузоподъемным краном 16 оператор, например, задает ограничения на максимальную скорость перемещения стрелы, грузовой тележки или грузозахватного органа, либо на скорость работы соответствующего привода. Оператор может также вводить ограничения на пространственное положение стрелы, грузовой тележки или грузозахватного органа. Это является необходимым, например, в случае появления в зоне работы крана какого-либо объекта, координаты которого не были введены при задании параметров координатной защиты.
При введении оператором любых ограничений цифровое вычислительное устройство 1 учитывает приоритет оператора в управлении краном и в реальном масштабе времени осуществляет корректировку траектории перемещения груза и передает на выходное устройство 8 измененные сигналы управления приводами 16. Это обеспечивает безопасное и эффективное управление краном, в том числе достижение нулевых скоростей перемещения груза в его конечной точке, при совместном управлении краном оператором и цифровым вычислительным устройством 1.
Кроме контроля скоростных и нагрузочных параметров работы крана, а также параметров пространственного положения механизмов крана, цифровое вычислительное устройство 1 при помощи дополнительных датчиков 14 может контролировать внешние условия работы крана, например скорость ветра, и учитывать их при формировании сигналов управления приводами механизмов грузоподъемного крана.
В данном описании схематично приведены лишь частные варианты реализации предложенного способа. Изобретение охватывает другие возможные варианты его реализации и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
1. RU 2116240 C1, B66C 23/90, 27.07.1998.
2. RU 2309112, B66C 23/88, 13/18, 27.10.2007.
3. RU 2312814 C1, B66C 23/88, B66C 13/18, 20.12.2007.
Изобретения относятся к вариантам способа предотвращения раскачивания груза на гибком подвесе при его подъеме стреловым краном. Способ заключается в том, что путем воздействия на органы управления краном инициируют формирование сигналов управления приводами механизмов перемещения стрелы и/или грузовой тележки, при этом грузозахватный орган подвешен на грузовом канате к стреле или к грузовой тележке грузоподъемного крана. Посредством датчиков контролируют нагрузку грузоподъемного крана и пространственное положение его стрелы и/или грузовой тележки. С помощью цифрового вычислительного устройства формируют сигналы управления приводами и предотвращают раскачивание груза в конечной точке его перемещения. Согласно первому варианту способа после перемещения грузозахватного органа к грузу, подлежащему подъему, с использованием цифрового вычислительного устройства осуществляют прогноз величины горизонтального перемещения точки или узла подвеса грузового каната к стреле или к грузовой тележке вследствие деформации стрелы под воздействием веса груза. Перед включением привода подъема грузозахватного органа формируют сигналы управления, по меньшей мере, одним приводом механизмов перемещения стрелы и/или грузовой тележки. Перемещают точку или узел подвеса грузовых канатов в положение не над грузом, а в положение, при котором после деформации стрелы и/или башни крана при работе привода грузовой лебедки на подъем груза, грузовые канаты займут вертикальное положение в момент отрыва груза от земли. Согласно второму варианту способа в цифровое вычислительное устройство вводят параметры или координаты пространственного положения конечной точки перемещения груза относительно грузоподъемного крана и учитывают их при формировании сигналов управления приводами. Ввод осуществляют посредством органов управления. Устройство позиционирования установлено в зоне конечной точки перемещения груза. Вычислительное устройство учитывает приоритет оператора в управлении грузоподъемным краном и осуществляет корректировку траектории перемещения груза. Достигается сокращение рабочего цикла стрелового грузоподъемного крана и повышение эффективности предотвращения раскачивания груза. 2 н. и 12 з.п. ф-лы, 1 ил.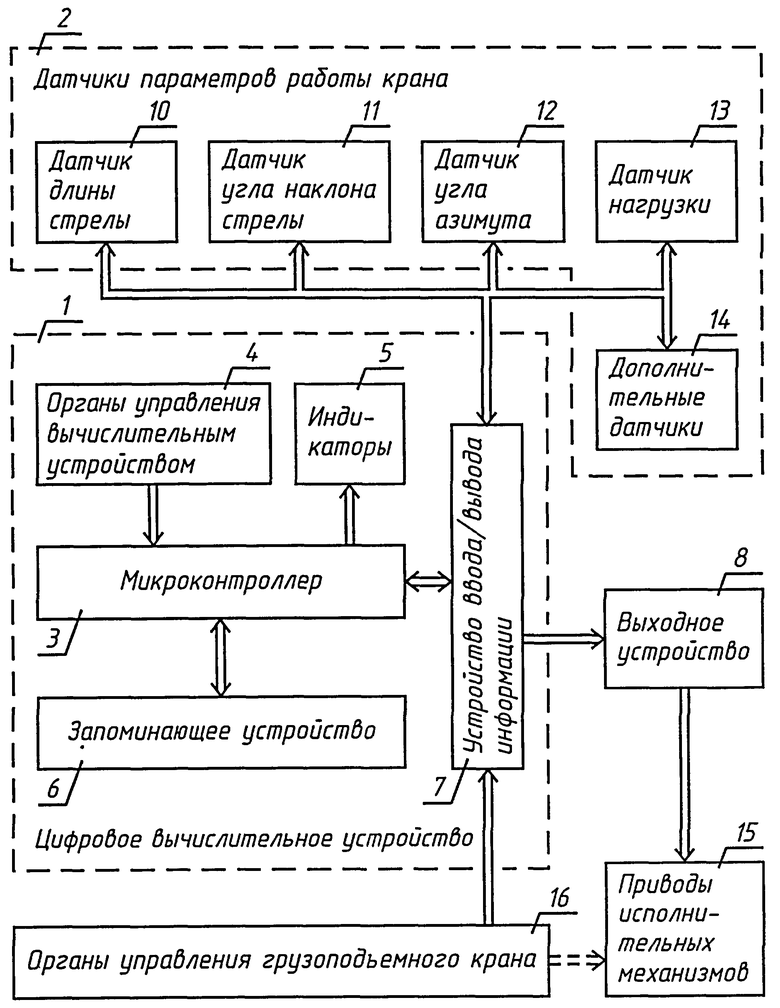
1. Способ предотвращения раскачивания груза на гибком подвесе при его подъеме стреловым грузоподъемным краном, заключающийся в том, что путем воздействия на органы управления краном инициируют формирование сигналов управления приводами механизмов перемещения стрелы и/или грузовой тележки и грузозахватного органа, подвешенного на грузовом канате к стреле или к грузовой тележке грузоподъемного крана, отличающийся тем, что после перемещения грузозахватного органа к грузу, подлежащему подъему, с использованием цифрового вычислительного устройства осуществляют прогноз величины горизонтального перемещения точки или узла подвеса грузового каната к стреле или к грузовой тележке вследствие деформации стрелы под воздействием веса груза, подлежащего подъему, а перед включением привода подъема грузозахватного органа или в начальной стадии этого подъема путем формирования сигналов управления, по меньшей мере, одним приводом механизмов перемещения стрелы и/или грузовой тележки перемещают точку или узел подвеса грузовых канатов в положение не над грузом, а в положение, при котором после деформации стрелы и/или башни крана при работе привода грузовой лебедки на подъем груза грузовые канаты займут вертикальное положение в момент отрыва груза от земли.
2. Способ по п.1, отличающийся тем, что прогноз величины горизонтального перемещения точки или узла подвеса грузового каната под воздействием веса груза осуществляют с использованием выходных сигналов датчиков пространственного положения стрелы и/или грузовой тележки и математической модели грузоподъемного крана, предварительно записанной в памяти цифрового вычислительного устройства.
3. Способ по п.1 или 2, отличающийся тем, что сигналы управления, по меньшей мере, одним приводом механизмов перемещения стрелы и/или грузовой тележки из условия перемещения указанной точки или узла подвеса на прогнозируемую величину формируют посредством цифрового вычислительного устройства или оператором грузоподъемного крана с использованием информационных сигналов, предоставляемых оператору вычислительным устройством, оснащенным соответствующими элементами индикации.
4. Способ по п.1 или 2, отличающийся тем, что за указанную прогнозируемую величину горизонтального перемещения принимают увеличение вылета грузозахватного органа под воздействием веса груза, а указанные сигналы управления приводами механизмов перемещения стрелы и/или грузовой тележки перед включением привода подъема грузозахватного органа или в начальной стадии этого подъема формируют из условия уменьшения вылета на прогнозируемую величину.
5. Способ по п.4, отличающийся тем, что указанное уменьшение вылета осуществляют путем формирования сигналов управления приводами, направленных на подъем стрелы и/или втягивание стрелы, и/или перемещение грузовой тележки в сторону оси вращения поворотной части крана.
6. Способ по п.1 или 2, отличающийся тем, что величину веса груза, используемую для прогноза величины горизонтального перемещения точки или узла подвеса грузового каната под воздействием веса этого груза, вводят в цифровое вычислительное устройство оператором в ручном режиме или из внешнего запоминающего устройства, например, с электронной технологической карты производства погрузочно-разгрузочных работ, или со стационарного диспетчерского поста с использованием проводного или беспроводного канала связи этого поста с цифровым вычислительным устройством, или путем считывания информации с устройства идентификации груза, прикрепленного к нему.
7. Способ по п.1 или 2, отличающийся тем, что величину веса груза, используемую для прогноза величины горизонтального перемещения точки или узла подвеса грузового каната под воздействием веса этого груза, определяют цифровым вычислительным устройством с использованием выходных сигналов датчиков нагрузки грузоподъемного крана, как среднюю величину массы однотипных грузов, поднимаемых и перемещаемых грузоподъемным краном в различных рабочих циклах.
8. Способ предотвращения раскачивания груза на гибком подвесе, заключающийся в том, что путем воздействия на орган управления грузоподъемным краном формируют сигнал запуска приводов механизмов перемещения стрелы и/или грузовой тележки, и/или грузозахватного органа, посредством датчиков контролируют нагрузку грузоподъемного крана и пространственное положение его стрелы и/или грузовой тележки, и/или грузозахватного органа, после чего с помощью цифрового вычислительного устройства формируют сигналы управления указанными приводами из условия реализации траектории перемещения груза, отвечающей требованиям безопасности работы крана и предотвращения раскачивания груза в конечной точке его перемещения, с использованием выходных сигналов указанных датчиков и информации о статических и динамических параметрах крана, предварительно записанной в запоминающее устройство цифрового вычислительного устройства, отличающийся тем, что в цифровое вычислительное устройство дополнительно вводят параметры или координаты пространственного положения конечной точки перемещения груза относительно грузоподъемного крана и учитывают их при формировании указанных сигналов управления приводами, причем этот ввод осуществляют с помощью органов управления вычислительным устройством или из внешнего запоминающего устройства, например, с электронной технологической карты производства погрузочно-разгрузочных работ, или со стационарного диспетчерского поста с использованием проводного или беспроводного канала связи этого поста с цифровым вычислительным устройством, или путем считывания, с использованием этого канала связи, информации с устройства позиционирования, установленного в зоне конечной точки перемещения груза, кроме того, введенные параметры или координаты учитываются при формировании сигналов управления приводами таким образом, чтобы в зависимости от выбранного приоритета подъем/опускание и перемещение груза осуществлялись бы с минимальными затратами энергии или времени перемещения груза, причем цифровое вычислительное устройство учитывает приоритет оператора в управлении грузоподъемным краном и осуществляет корректировку траектории перемещения груза.
9. Способ по п.8, отличающийся тем, что путем воздействия оператора на указанный или дополнительный орган управления грузоподъемным краном формируют сигнал ограничения скорости работы, по меньшей мере, одного привода механизмов перемещения стрелы и/или грузовой тележки, и/или грузозахватного органа, или скорости перемещения стрелы, и/или грузовой тележки, и/или грузозахватного органа, или пространственного положения стрелы, и/или грузовой тележки, и/или грузозахватного органа, передают этот сигнал в цифровое вычислительное устройство и учитывают его при формировании указанных сигналов управления приводами, задающих траекторию перемещения груза.
10. Способ по п.8, отличающийся тем, что перед подъемом и перемещением груза в цифровое вычислительное устройство вводят допустимые значения параметров работы крана, характеризующих нагрузку и/или пространственное положение его стрелы, и/или грузовой тележки, и/или грузозахватного органа, а при формировании сигналов управления приводами, задающих траекторию перемещения груза, дополнительно накладывают ограничения на величины этих сигналов из условия предотвращения превышения текущих значений параметров работы крана их допустимых значений.
11. Способ по п.8, отличающийся тем, что посредством указанных датчиков контролируют длину каната и кратность запасовки грузового полиспаста, на основании которых вычисляют высоту подвеса груза и период его раскачивания и учитывают результаты этих вычислений при формировании сигналов управления приводами механизмов грузоподъемного крана.
12. Способ по п.8, отличающийся тем, что дополнительно контролируют нагрузку, по меньшей мере, одного привода механизмов крана и учитывают ее при формировании сигналов управления приводами механизмов грузоподъемного крана.
13. Способ по п.8, отличающийся тем, что при помощи анемометра дополнительно измеряют скорость ветра и учитывают ее при формировании сигналов управления приводами механизмов грузоподъемного крана.
14. Способ по любому из пп.8-13, отличающийся тем, что формирование сигналов управления приводами механизмов грузоподъемного крана осуществляют с использованием математической модели крана, предварительно записанной в памяти цифрового вычислительного устройства.
| CN 101211170 А, 02.07.2008 | |||
| JP 9255277 А, 30.09.1997 | |||
| ЕР 1894881 А2, 05.03.2008 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ПРИ ПОДЪЕМЕ ГРУЗА ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2312814C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| Генератор качающейся частоты | 1984 |
|
SU1298835A1 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ | 2001 |
|
RU2259579C2 |

