Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты грузоподъемных кранов для предотвращения их аварий и предупреждения травмирования обслуживающего персонала.
Известен способ защиты грузоподъемного крана от перегрузки путем установки допустимых значений нагрузки для различных угловых положений его стрелы, контроля текущих значений этих параметров в процессе работы крана, сравнения текущего значения нагрузки с допустимым для текущего положения стрелы и формирования предупреждающих сигналов и сигналов управления исполнительными устройствами крана в зависимости от результатов этого сравнения [1].
Его недостатком является отсутствие защиты грузоподъемного крана от столкновений с препятствиями (координатной защиты) при работе крана в стесненных условиях.
Наиболее близким к предложенному является способ повышения безопасности работы грузоподъемного крана путем предварительного определения и запоминания допустимых значений параметров работы крана, характеризующих нагрузку и пространственное положение его стрелы или грузозахватного органа, измерения этих параметров в процессе работы крана, сравнения измеренных значений с допустимыми и последующего формирования, с учетом результатов этого сравнения, предупреждающих сигналов и сигналов управления исполнительными устройствами крана, направленных на предотвращение превышения этими параметрами их допустимых значений [2, 3].
Недостатком этого способа является пониженная безопасность работы грузоподъемного крана ввиду отсутствия контроля:
- проведения крановщиком визуальной проверки технического состояния крана перед началом его работы и выявления дефектов крана;
- нахождения людей на пути перемещения крана, его механизмов или груза;
- пространственного положения препятствий и людей в рабочей зоне крана с учетом возможного изменения этого положения;
- правильности строповки или обвязки груза;
- правильности установки крана на выносные опоры;
- параметров нагрузки и координатной защиты до начала процесса подъема/перемещения груза краном.
Основной технической задачей, на решение которой направлено заявленное изобретение, является повышение безопасности работы грузоподъемного крана, в том числе безопасности обслуживающего персонала. Эта задача решается путем устранения, по меньшей мере, одного из указанных недостатков.
Дополнительными техническими задачами являются:
- повышение производительности работы крана путем сокращения потерь времени за счет автоматического ввода параметров координатной защиты и предотвращения попыток выполнения циклов подъема и/или перемещения груза, в течение которых возможно превышение допустимых значений параметров работы крана и, соответственно, остановка крана;
- расширение функциональных возможностей системы безопасности;
- упрощение устройства ввода параметров координатной защиты и улучшение условий работы крановщика за счет автоматического ввода этих параметров.
В первом варианте предложенного способа повышения безопасности работы грузоподъемного крана путем предварительного определения или задания допустимых значений параметров, характеризующих нагрузку и/или пространственное положение его стрелы или грузозахватного органа, их запоминания, измерения в процессе работы крана прямым или косвенным методом указанных параметров, сравнения измеренных значений с допустимыми и последующего формирования, в зависимости от результатов этого сравнения, сигналов управления или блокирования управления исполнительными устройствами крана, направленных на предотвращение превышения параметрами допустимых значений, поставленные технические задачи решаются тем, что перед началом работы крана посредством автоматизированной системы контроля дополнительно выявляют проведение крановщиком визуальной проверки технического состояния крана и после окончания этой проверки формируют предупреждающий сигнал или сигнал разрешения пуска крана в работу. Для этого автоматизированную систему контроля оснащают устройством определения положения крановщика относительно крана и/или на кране, а выявление визуальной проверки крановщиком технического состояния крана осуществляют путем контроля нахождения крановщика в зонах, из которых возможно визуальное наблюдение узлов и элементов конструкции крана, подлежащих проверке. Параметры и/или координаты зон визуального наблюдения могут быть определены из условия возможности визуальной проверки крановщиком из этих зон технического состояния ходовой части, и/или металлических конструкций башни и/или стрелы, и/или соединений отдельных секций башни и/или стрелы, и/или элементов подвески стрелы, и/или исполнительных приводов, и/или канатов и их крепления, и/или грузозахватного органа, и/или тормозов, и/или подкрановых путей и концевых упоров, и/или противоугонных захватов, и/или гибкого токоведущего кабеля, и/или наличия и исправности ограждений механизмов и электрооборудования крана.
При этом положение крановщика определяют, в частности, с использованием приемников сигналов спутников глобальной системы определения местоположения, например GPS (Global Position System) системы Navstar или «Глонас» (глобальной навигационной системы), бесконтактных радиочастотных идентификационных меток (RFID), радиочастотных или инерциальных устройств определения местоположения.
Во втором варианте способа, реализующем аналогичный принцип предотвращения превышения допустимых значений параметров работы крана, в процессе его работы дополнительно выявляют наличие людей на пути перемещения крана, и/или его механизмов, и/или груза, посредством автоматизированной системы контроля выявляют наличие опасности травмирования людей и, при ее наличии, формируют предупреждающий сигнал для крановщика о необходимости остановки грузоподъемного крана или сигнал блокирования движений грузоподъемного крана, либо автоматически передают людям предупреждающий сигнал о необходимости соблюдать осторожность или покинуть зону работы грузоподъемного крана. Выявление наличия людей осуществляют путем контроля их местоположения относительно грузоподъемного крана с использованием приемников сигналов спутников глобальной системы определения местоположения, например GPS (Global Position System) системы Navstar или Глонас (глобальной навигационной системы), бесконтактных радиочастотных идентификационных меток (RFID), радиочастотных или инерциальных устройств определения местоположения.
Определение местоположения людей может осуществляться с использованием их сотовых телефонов, оснащенных устройствами определения их местоположения, например GPS или Глонас, и с передачей данных об этом местоположении в автоматизированную систему контроля с использованием беспроводного интерфейса сотового телефона, например Bluetooth, или Wi-Fi, или ZigBee, или сети сотовой связи, например GSM/GPRS или CDMA. Этот же сотовый телефон может быть использован для передачи звуковых и/или речевых предупреждающих сигналов от крановщика и/или от автоматизированной системы контроля.
В третьем варианте способа с аналогичным принципом предотвращения превышения допустимых значений параметров работы крана поставленная техническая задача решается тем, что допустимые и/или запрещенные значения параметров, характеризующие пространственное положение стрелы или грузозахватного органа крана, задают путем установки на подвижных или неподвижных препятствиях, на одежде или на экипировке людей, находящихся в зоне работы грузоподъемного крана, радиочастотных устройств определения местоположения, радиочастотных идентификационных меток (RFID), приемников сигналов спутников глобальной системы определения местоположения, например GPS (Global Position System) системы Navstar или Глонас (глобальной навигационной системы), или инерциальных устройств определения местоположения, выходные сигналы которых передают в автоматизированную систему контроля грузоподъемного крана. Эти устройства выполнены, в общем случае, с возможностью определения их угловых положений и формирования допустимых и/или запрещенных значений параметров пространственного положения стрелы или грузозахватного органа крана в виде областей рабочего пространства крана в зависимости от этих угловых положений. Эти области могут быть заданы в виде ограничений максимальной или минимальной высоты (ограничений типа «потолок» или «крыша»), положения в горизонтальной плоскости (ограничений типа «стена») и/или углового положения (ограничений типа «поворот влево» и «поворот вправо»).
Указанные радиочастотные или инерциальные устройства определения местоположения, радиочастотные идентификационные метки (RFID), приемники сигналов спутников глобальной системы определения местоположения с целью автоматического изменения параметров рабочей зоны крана могут прикрепляться к поверхности здания/сооружения и переноситься по мере его строительства или прикрепляться к элементам конструкции строящегося здания/сооружения до их монтажа с последующим переносом краном вместе с этими элементами. Они могут быть выполнены с возможностью передачи сигналов в автоматизированные системы контроля двух и более кранов, работающих с пересекающимися рабочими зонами.
В четвертом варианте способа с аналогичным принципом предотвращения превышения допустимых значений параметров работы крана поставленная техническая задача решается тем, что дополнительно осуществляют автоматический контроль параметров, характеризующих предварительно установленные требования к безопасной строповке или обвязке поднимаемого и/или перемещаемого груза. В случае выявления нарушения этих требований формируют предупреждающий сигнал для крановщика и/или для стропальщика и/или сигнал блокирования подъема и/или перемещения груза.
За указанное требование к безопасной строповке или обвязке поднимаемого и/или перемещаемого груза могут быть приняты соответствие грузоподъемности строп весу груза, ограничение заранее установленного максимального угла между ветвями строп, отсутствие узлов и петель на стропах, заранее установленное требование к равномерности натяжения строп и/или расположение грузозахватного органа над центром тяжести поднимаемого груза, а в качестве параметра, характеризующего выполнение этого требования, - диаметр канатов строп, число и/или прямолинейность строп, угол между ветвями строп, разность усилий в стропах и/или средний угол наклона строп относительно гравитационной вертикали. Эти параметры измеряют посредством датчиков диаметра и/или угла наклона строп, усилий в стропах и т.п. или формируют видеоизображение строповки или обвязки груза и определяют эти параметры путем обработки видеоизображения в устройстве автоматического контроля.
В пятом варианте способа повышения безопасности работы крана с вышеупомянутым принципом предотвращения превышения допустимых значений параметров работы крана поставленная техническая задача решается тем, что дополнительно осуществляют контроль параметров, характеризующих предварительно установленные требования к безопасной установке крана на выносные опоры и в случае выявления нарушения какого-либо требования формируют предупреждающий сигнал для крановщика и/или сигнал блокирования подъема и/или перемещения груза. За эти требования принимают, в частности, выдвижение и установку всех имеющихся выносных опор, заранее установленное минимальное расстояние между поворотной частью крана при любом его положении и строениями или другими предметами, наличие подкладок или опорных плит под выносными опорами, заранее установленное минимальное расстояние между опорами и краем откоса котлована или канавы, и/или заранее установленное максимальное значение уклона площадки установки грузоподъемного крана. В качестве параметра, характеризующего выполнение соответствующего требования, принимают количество выдвинутых и установленных выносных опор, расстояние между поворотной частью крана и строениями или другими предметами, количество подкладок или опорных плит под выносными опорами, расстояние между выносными опорами и краем откоса котлована или канавы и/или угол уклона площадки установки грузоподъемного крана. В системе может осуществляться контроль указанного параметра (или нескольких параметров в различных сочетаниях) с использованием датчика пространственного положения выносных опор, датчика пространственного положения или наличия подкладок или опорных плит, датчика расстояния от грузоподъемного крана до строения или до другого предмета и/или датчика расстояния от выносных опоры до края откоса котлована или канавы. Любой из датчиков может быть радиолокационным или оптическим. В последнем случае формируется видеоизображение установки крана на выносные опоры, а параметры, характеризующие требования к его безопасной установке на опоры, определяются путем обработки этого видеоизображения. Угол уклона площадки установки грузоподъемного крана может быть определен с использованием выходных сигналов датчиков пространственного положения выносных опор, подкладок или опорных плит по высоте.
В шестом варианте способа, использующем аналогичный принцип предотвращения превышения допустимых значений параметров работы крана, поставленная техническая задача решается тем, что измерение этих параметров осуществляют оптическим методом, для этого грузоподъемный кран оснащают системой технического зрения, посредством которой формируют видеоизображение процесса подъема и/или перемещения груза, после чего определяют значение этого параметра путем обработки видеоизображения. Система технического зрения выполнена, в частности, с возможностью определения массы поднимаемого и/или перемещаемого груза, его размеров, расстояния от груза до строений или других предметов и/или расстояния до людей, находящихся в зоне работы грузоподъемного крана. При выявлении уменьшения расстояния от груза до строений, других предметов и людей, находящихся в зоне работы крана, до предварительно установленной величины дополнительно может формироваться предупреждающий сигнал для крановщика или для людей, находящихся в зоне работы крана.
В любом варианте предложенного способа для достижения указанного технического результата параметры, характеризующие нагрузку и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана, сигналы управления, предупреждающие сигналы, видеоизображение процесса подъема и/или перемещения груза, строповки груза и/или установки крана на выдвижные опоры, сигналы о местоположении крановщика и людей в зоне работы грузоподъемного крана, при их наличии, записывают в энергонезависимую память автоматизированной системы контроля грузоподъемного крана с возможностью считывания в случае необходимости.
Реализация системы защиты и управления крана с указанными отличительными признаками независимых пунктов формулы изобретения позволяет предупредить пуск крана в работу без проведения крановщиком визуальной проверки его технического состояния, предупредить травмирование людей движущимися механизмами крана или грузом, осуществить автоматическое изменение границ рабочей зоны крана непосредственно в процессе его работы с учетом изменений пространственного положения препятствий и людей в этой зоне, осуществить контроль правильности строповки или обвязки груза и правильности установки крана на выносные опоры, а также определить параметры нагрузки и координатной защиты до начала процесса подъема/перемещения груза краном без приближения к предельным значениям этих параметров. Это позволяет повысить безопасность работы грузоподъемного крана, в том числе безопасность обслуживающего персонала.
Отличительные признаки предложенного способа во всех вариантах его реализации приводят к расширению функциональных возможностей системы безопасности - дополнительно обеспечиваются видеорегистрация процесса подъема и перемещения груза, передача параметров координатной защиты на группу кранов, контроль действий и местоположения обслуживающего персонала, передача обслуживающему персоналу предупреждающих сигналов и т.д.
Одновременно достигается сокращение потерь времени за счет автоматического ввода параметров координатной защиты и предотвращения попыток выполнения циклов подъема и перемещения груза с недопустимыми значениями параметров работы крана, что приводит к повышению производительности работы крана. Автоматический ввод параметров координатной защиты приводит также к упрощению устройства ввода этих параметров и к улучшению условий работы крановщика.
Соответственно, указанные отличительные признаки способа находятся в прямой причинно-следственной связи с достижением основного и дополнительных технических результатов.
На чертеже в качестве примера приведена одна из возможных функциональных схем системы защиты грузоподъемного крана.
Система защиты, которая может именоваться также системой автоматизированного контроля и управления, устройством или прибором безопасности и т.п., содержит информационно-управляющий блок 1, выполненный на основе микроконтроллера 2, и подключенные к этому блоку при помощи проводного или беспроводного интерфейса датчики 3 нагрузки и/или пространственного положения стрелы, и/или грузозахватного органа крана и исполнительные устройства 4.
В состав информационно-управляющего блока 1, который может именоваться также блоком обработки данных, блоком индикации, контроллером и т.п., могут входить органы управления системой 5, устройство индикации 6, блок памяти/регистратор параметров 7, беспроводное устройство приема/передачи данных 8, устройство ввода/вывода информации 9 и, при необходимости, другие устройства, например часы реального времени, подключенные непосредственно к микроконтроллеру 2 или к устройству ввода/вывода информации 9. Часть указанных устройств может не входить в информационно-управляющий блок 1. Эти устройства могут подключаться к устройству ввода/вывода информации 9 как внешние устройства информационно-управляющего блока 1.
Дополнительно в систему, в зависимости от вариантов ее исполнения, могут входить система технического зрения 10, датчики положения выносных опор 11, датчики местоположения крана 12 и, при необходимости, другие датчики.
Для контроля наличия людей на пути перемещения крана, его стрелы или груза, контроля местоположения людей, а также контроля пространственного положения препятствий в зоне работы крана, на этих препятствиях, на одежде или на экипировке людей устанавливаются датчики их положения 13. Они выполнены в виде приемников сигналов спутников глобальной системы определения местоположения GPS (Global Position System) систем Navstar или «Глонас», бесконтактных радиочастотных идентификационных меток (RFID), радиочастотных или инерциальных устройств определения местоположения, выполненных с возможностью передачи данных в беспроводное устройство приема/передачи данных 8.
Устройство ввода-вывода информации 9 обеспечивает согласование логических уровней входных и выходных сигналов микроконтроллера 2 с другими функциональными устройствами системы. Передача данных в системе, в зависимости от варианта исполнения устройства ввода-вывода информации 9 и интерфейсных схем подключенных к нему устройств, осуществляется по радиальной схеме при помощи отдельных проводов, по мультиплексному каналу обмена данными (CAN, UN, RS-485 и т.д.) и/или по радиоканалу (Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д.). В последнем случае во всех подключаемых устройствах, включая датчики 3, 10-12, устанавливаются приемопередатчики с соответствующими антеннами.
Беспроводное устройство приема/передачи данных 8 и устройство ввода-вывода информации 9 могут быть объединены.
Исполнительные устройства 4, как правило, объединены в единый выходной или силой блок, блок расширения, выходной контроллер и т.п. и выполнены в виде набора силовых электромагнитных реле или силовых электронных ключей, подключенных к управляющим входам электрогидравлических или электромеханических приводов механизмов грузоподъемного крана. Этот блок, при необходимости, может содержать микроконтроллер и интерфейсную схему для проводной или беспроводной связи с информационно-управляющим блоком 1.
Если на кране используется ручное управление его механизмами, то исполнительные устройства 4 обеспечивают блокирование работы (отключение) исполнительных механизмов (приводов) крана в опасных режимах его работы. Возможно также электрическое управление исполнительными механизмами крана, например, с помощью органов управления 6. В этом случае исполнительные устройства осуществляют формирование сигналов управления исполнительными механизмами (приводами) крана.
Набор датчиков 3 зависит от варианта реализации предложенной системы защиты и от типа грузоподъемного крана - мостовой или стреловой кран, кран с телескопической или решетчатой стрелой, с гидравлическим или канатным приводом механизма подъема стрелы и т.д. В общем случае они включают в себя датчик угла подъема (наклона) стрелы, датчик длины стрелы, датчик нагрузки или массы груза (датчик силы или датчики давления), датчик угла поворота крановой установки (датчик азимута), датчик предельного подъема грузозахватного органа, датчик приближения к линии электропередачи, датчики положений органов ручного управления исполнительными механизмами и другие датчики.
Эти датчики 3 могут быть объединены в группы по месту их расположения на грузоподъемном кране, например на оголовке телескопируемой стрелы, на ее корневой секции, на неповоротной части крана и т.д. В этом случае каждая группа датчиков снабжается контроллером, реализованным на микроконтроллере и осуществляющим преобразование по уровню, усиление, нормирование и/или обработку их выходных сигналов - фильтрацию, термокомпенсацию, лианеризацию и т.д. перед передачей этих сигналов в информационно-управляющий блок 1.
Система технического зрения 10 выполнена в виде видеокамер - одной или нескольких стереопар, расположенных на стреле или на кабине крана с возможностью обзора рабочей зоны крана, и цифрового сигнального процессора, осуществляющего обработку и анализ видеоизображения.
Датчики положений выносных опор 11 выполнены, как правило, в виде концевых выключателей, а датчик местоположения крана 12 - в виде приемника GPS, радиочастотного или инерциального устройства определения местоположения. В последнем случае датчик содержит, по меньшей мере, однокоординатный или многокоординатный акселерометр и интегратор, подключенный к его выходу.
Система, при необходимости, может иметь контактные (поводковые) или бесконтактные датчики диаметра канатов строп, числа ветвей строп, угла между ветвями строп, угла наклона строп относительно гравитационной вертикали, тензометрические датчики усилий в ветвях стропах и т.д., подключенные к устройству ввода/вывода информации 9.
Органы управления 5 выполнены в виде набора кнопок/клавиш, переключателей, сенсорного экрана дисплея - устройства индикации 6 и т.п. При необходимости используется дополнительный контроллер органов управления 5, например контроллер клавиатуры.
Устройство индикации 6 может содержать как символьный, так и графический, например жидкокристаллический TFT, индикатор (дисплей) и/или светодиодные индикаторы. В его состав, при необходимости, входит звуковой или речевой сигнализатор.
Система может дополнительно содержать блок памяти (регистратор параметров) 7, встроенный в информационно-управляющий блок 1 и/или съемный (внешний). Он выполняется, преимущественно, в виде блока энергонезависимой Flash памяти, подключенного к микроконтроллеру 2 и/или к устройству ввода-вывода информации 9. (На чертеже условно показан первый вариант). Этот блок может дополнительно содержать часы реального времени.
Беспроводное устройство приема/передачи данных 8 выполнено с использованием технологий Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д., или в виде считывателя бесконтактных радиочастотных идентификационных меток (RFID). Это устройство может быть выполнено с возможностью определения расстояния до источника сигнала и направления на этот источник с использованием времяимпульсного или фазового принципа построения таких устройств.
Система защиты (автоматизированного контроля и управления) работает следующим образом.
В память микроконтроллера 2 или в блок памяти 7 в виде формул - подпрограмм микроконтроллера, разработанных с использованием математической модели крана, или в виде таблиц, предварительно записываются допустимые величины нагрузок крана в различных режимах его работы (с полным или неполным опорным контуром, с различным стреловым оборудованием и т.д.) и при различных положениях стрелы или грузозахватного органа.
Перед началом работы грузоподъемного крана крановщик при помощи органов управления 5 осуществляет установку параметров грузоподъемного крана, характеризующих его геометрию, условия и режим работы. Количество и вид этих параметров определяются конструкцией крана и требованиями к его безопасной эксплуатации. К ним относятся вид используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура, ограничения по координатной защите и т.д. При необходимости крановщик при помощи органов управления 5 вводит в микроконтроллер 2 параметры ограничений рабочей зоны крана по координатной защите. Введенные параметры сохраняются в памяти микроконтроллера 2.
В первом варианте предложенного способа описываемая система реализует автоматизированный контроль проведения крановщиком визуальной проверки технического состояния крана. Для этого в память микроконтроллера 2 или в блок памяти 7 предварительно записывают параметры (координаты) зон положений крановщика относительно крана или на кране, из которых крановщик имеет возможность визуальной проверки его технического состояния. Крановщика снабжают устройством определения его местоположения 13.
Во время визуальной проверки крановщиком ходовой части, металлических конструкций башни и стрелы, соединений отдельных секций башни и стрелы, элементов подвески стрелы, исполнительных приводов, канатов и их крепления, грузозахватного органа, тормозов, подкрановых путей и концевых упоров, противоугонных захватов, гибкого токоведущего кабеля, ограждений механизмов и электрооборудования крана и, при необходимости, других механизмов крана его перемещения фиксируются устройством определения местоположения 13, сигналы с которого через беспроводное устройство приема/передачи данных 8 передаются в микроконтроллер 2. Далее микроконтроллер 2, сопоставляя полученные данные с записанными параметрами (координатами) зон положений крановщика, в которых он должен находиться при проведении этой визуальной проверки, подтверждает ее выполнение. После окончания проверки микроконтроллер 2 с помощью устройства индикации 6 формирует для крановщика предупреждающий сигнал и передает на устройство ввода/вывода 9 сигнал, разрешающий пуск крана в работу. Соответственно, пуск крана возможен только после визуальной проверки крановщиком его технического состояния, либо, по меньшей мере, после подтверждения того, что крановщик находился в тех зонах около крана или на кране, из которых возможна проверка упомянутых узлов и механизмов крана.
После пуска крана в работу и выполнения операций подъема и перемещения груза микроконтроллер 2 работает по программе, записанной в его встроенной памяти программ или в блоке памяти 7 и через устройство ввода/вывода информации 9 осуществляет обмен информацией с датчиками 3, 10-12 по общей мультиплексной линии связи, по отдельным проводам и/или по радиоканалу. После получения информации от датчиков микроконтроллер 2 определяет действительные значения рабочих параметров - текущую нагрузку крана, запас его грузовой устойчивости и фактическое положение его стрелы или грузозахватного органа. При необходимости, для определения текущих значений этих параметров осуществляются преобразования выходных сигналов датчиков 3. Это имеет место в случае, когда текущая нагрузка крана и/или положение его стрелы измеряются косвенным образом, например, при определении нагрузки стрелового гидравлического крана по давлениям в штоковой и поршневой полостях гидроцилиндра подъема стрелы. Алгоритмы этих преобразований реализуются программно микроконтроллером 2.
Далее микроконтроллер 2, работая по программе, осуществляет сравнение текущих значений параметров, характеризующих нагрузку и пространственное положение стрелы или грузозахватного органа крана, с допустимыми значениями этих параметров и формирует, в зависимости от результатов этого сравнения, сигналы управления или блокирования управления исполнительными устройствами 4 грузоподъемного крана, направленные на предотвращение превышения допустимых значений указанных параметров. Благодаря этому осуществляется защита крана от перегрузки и от столкновений с препятствиями (координатная защита).
В системе, реализующей второй вариант предложенного способа, в процессе работы крана дополнительно выявляется наличие людей (рабочих) на пути перемещения крана, его механизмов или груза (грузозахватного органа). Для этого людей, находящихся в зоне работы крана, оснащают бесконтактными датчиками контроля их местоположения 13, сигналы с которых через беспроводное устройство приема/передачи данных 8 передают в микроконтроллер 2.
Микроконтроллер 2, анализируя выходной сигнал датчика 12, определяет местоположение крана, с использованием выходных сигналов датчиков 3 осуществляет вычисления траектории движения стрелы и груза, после чего с использованием данных о местоположении людей, полученных от устройства 8, выявляет наличие опасности их травмирования краном или перемещаемым грузом.
При наличии такой опасности микроконтроллер 2 с помощью устройства индикации 6 формируют предупреждающий сигнал для крановщика о необходимости остановки грузоподъемного крана или сигнал блокирования движений грузоподъемного крана, который поступает на исполнительные устройства 4, либо автоматически, с использованием устройств 8 и 13 передает людям предупреждающий сигнал о необходимости соблюдать осторожность или покинуть зону работы грузоподъемного крана. Для передачи таких предупреждающих сигналов и, одновременно, в качестве бесконтактных датчиков определения местоположения людей (рабочих) удобно использовать их сотовые телефоны, оснащенные приемниками GPS или иными средствами определения местоположения. Такая передача осуществляется с использованием беспроводного интерфейса сотового телефона - Bluetooth, или Wi-Fi, или ZigBee, или сети сотовой связи, например GSM/GPRS или CDMA. Передаваемые предупреждающие сигналы могут быть как звуковыми, так и речевыми. В последнем случае микроконтроллер 2 реализует синтез соответствующих речевых предупреждающих сообщений. Передача речевых предупреждающих сигналов возможна также от крановщика, для чего систему дополнительно оснащают микрофоном, подключенным к устройству ввода/вывода информации 9 (на чертеже условно не показано).
В системе, реализующей третий вариант предложенного способа, допустимые и/или запрещенные значения параметров, характеризующие пространственное положение стрелы или грузозахватного органа крана, задают путем установки на подвижных или неподвижных препятствиях, на одежде или на экипировке людей, находящихся в зоне работы грузоподъемного крана, бесконтактных датчиков 13 определения их местоположения.
Эти устройства могут быть выполнены с возможностью определения их угловых положений в горизонтальной и/или вертикальной плоскости (с использованием инклинометров, магнитных компасов и т.п.). В этом случае микроконтроллер 2 формирует допустимые и/или запрещенные значения параметров или зон (областей) пространственного положения стрелы или грузозахватного органа крана в зависимости от этих угловых положений. В частности, в виде ограничений максимальной или минимальной высоты (ограничений типа «потолок» или «крыша»), положения в горизонтальной плоскости (ограничений типа «стена») и/или углового положения (ограничений типа «поворот влево» и «поворот вправо»).
Перенос или поворот датчиков (устройств) определения местоположения 13 приводит к автоматическому изменению допустимой зоны работы крана, что дает возможность оперативного (динамического) изменения параметров этой зоны, в том числе во время подъема и перемещения груза краном.
Эти датчики (устройства) 13 могут прикрепляться к поверхности здания/сооружения и переноситься по мере его строительства или прикрепляться к элементам конструкции строящегося здания/сооружения до их монтажа с последующим переносом краном вместе с этими элементами. Благодаря этому во время строительства здания/сооружения реализуется автоматическое изменение параметров или зон координатной защиты, что приводит к экономии времени и исключению ошибок такой установки. Одновременно облегчается работа крановщика и обеспечивается упрощение органов управления 5, с помощью которых в системах защиты традиционно вводятся параметры координатной защиты.
Выходные сигналы датчиков 13 могут передаваться в информационно-управляющие блоки автоматизированных систем контроля двух и более кранов, работающих с пересекающимися рабочими зонами, что позволяет снизить затраты на реализацию системы защиты.
Другим путем повышения безопасности работы крана является автоматический контроль правильности строповки или обвязки поднимаемого и перемещаемого груза. Для его реализации предварительно определяются и записываются в память микроконтроллера 2 или в блок памяти 7 параметры, характеризующие установленные требования к этой строповке или обвязке. К ним, в частности, относятся соответствие грузоподъемности строп весу груза, ограничение заранее установленного максимального угла между ветвями строп, отсутствие узлов и петель на стропах, требование равномерности натяжения строп и расположение грузозахватного органа над центром тяжести поднимаемого груза. Для контроля параметров, отражающих эти требования, преимущественно на грузозахватном органе, устанавливаются датчики диаметра канатов строп, угла наклона строп и усилий в стропах и другие датчики, подключенные к устройству ввода/вывода информации 9. Другой вариант контроля этих параметров базируется на формировании видеоизображения строповки или обвязки груза с помощью системы технического зрения 10 и последующего определения этих параметров, включая выявление отсутствия узлов и петель на стропах, микроконтроллером 2 обработки видеоизображения или процессором цифровой обработки сигналов самой системы технического зрения 10.
Далее микроконтроллер 2 сравнивает предварительно запомненные значения параметров, характеризующих правильность строповки или обвязки груза, с полученными при помощи датчиков или системы технического зрения 10 и при выявлении несоответствий, формирует предупреждающий сигнал для крановщика (сигнал на устройство индикации 6) и/или для стропальщика (сигнал на переданное в его распоряжение устройство 13), и/или сигнал блокирования подъема, и/или перемещения груза, поступающий на исполнительные устройства 4.
Еще одна возможность повышения безопасности работы крана реализуется путем предотвращения неправильной установки крана на выносные опоры. Для этого также предварительно определяются и записываются в память микроконтроллера 2 или в блок памяти 7 параметры, характеризующие установленные требования к безопасной установке крана. К ним относятся, в частности, выдвижение и установка всех имеющихся выносных опор, соблюдение заранее установленного минимального расстояния между поворотной частью крана при любом его положении и строениями или другими предметами (например, 1,0 м), наличие подкладок или опорных плит под выносными опорами, соблюдение заранее установленного минимального расстояния между опорами и краем откоса котлована или канавы (например, 1,5 м), и/или соблюдение заранее установленного максимального угла наклона площадки, на которой устанавливается кран.
Для контроля параметров, характеризующих выполнение этих требований, система оснащается соответствующими датчиками, подключенными к устройству ввода/вывода информации 9. К ним относятся датчики пространственного положения (выдвижения) выносных опор 11, датчики пространственного положения или наличия подкладок под опоры или опорных плит, датчики расстояния от грузоподъемного крана до строения или до другого предмета и датчики расстояния от выносных опор до края откоса котлована или канавы. Возможно применение как одного датчика, так и нескольких датчиков различных типов в любых сочетаниях.
Для контроля пространственного положения (выдвижения) выносных опор могут использоваться концевые выключатели - датчики 11. Возможно также применение в качестве датчиков 11 устройств определения местоположения (радиочастотных, инерциальных или приемников GPS) непосредственно на опорах. Сигналы с этих устройств могут поступать как на устройство ввода/вывода информации 9, так и на беспроводное устройство приема/передачи данных 8.
Это техническое решение может быть также использовано и для контроля наличия подкладок или опорных плит под выносными опорами. Другой вариант реализации этого контроля может базироваться на применении радиочастотных идентификационных меток (RFID), установленных на подкладках или опорных плитах, и считывателей этих меток, размещенных на выдвижных опорах или в иных точках грузоподъемного крана.
Датчики расстояния (дальномеры) от грузоподъемного крана до строения или до другого предмета, а также датчики расстояния от выносных опор до края откоса котлована или канавы, могут быть радиочастотного, ультразвукового или оптического типа. Возможно также использование системы технического зрения 10 с реализацией контроля выдвижения опор и наличия подкладок или опорных плит путем анализа видеоизображения микроконтроллером 2 или процессором цифровой обработки сигналов самой системы технического зрения 10.
Угол уклона площадки установки грузоподъемного крана определяется на основании разности высот датчиков пространственного положения выносных опор, подкладок или опорных плит.
Микроконтроллер 2, контролируя выходные сигналы указанных датчиков и записанные в его памяти параметры, характеризующие требования к безопасной установке крана на выносные опоры, осуществляет правильность этой установки и при выявлений нарушений формирует предупреждающий сигнал для крановщика и/или сигнал блокирования работы крана.
Другой эффективный способ повышения безопасности работы крана основан на реализации принципа бесконтактного оптического «взвешивания» поднимаемого краном груза и определения его размеров, а также оптического контроля расстояния от груза до строений, других предметов и людей (рабочих), находящихся в зоне работы крана. Для этого система технического зрения 10 формирует видеоизображение процесса подъема/перемещения груза, а указанные параметры определяются путем обработки этого видеоизображения микроконтроллером 2 или самой системой технического зрения 10.
Алгоритм определения этих параметров базируется, в частности, на формировании трехмерного видеоизображения и распознавания образов с использованием базы данных, хранящейся в блоке памяти 7 или в самой системе технического зрения 10. В частности, в этой базе данных хранятся образы различных грузов, поднимаемых краном.
Перед началом подъема груза система, с использованием указанной базы данных, осуществляет распознавание (идентификацию) типа груза и определяет его размеры, осуществляя анализ трехмерного изображения. После чего, с использованием данных о параметрах этого груза - его удельного веса, массы и т.п., определяет возможность подъема и перемещения данного груза. Если масса груза превышает грузоподъемность крана, то подъем груза блокируется микроконтроллером 2. Благодаря этому исключаются попытки подъема грузов, превышающих грузоподъемность крана, что обеспечивает повышение безопасности его работы.
Аналогичный подход используется и для предупреждения столкновений крана или груза с препятствиями (зданиями, строениями, движущимися и неподвижными машинами и т.д.), а также для предупреждения травмирования людей, находящихся в зоне работы крана. Такая защита реализуется с учетом габаритных размеров груза и его ориентации в пространстве. При выявлении уменьшения расстояния от груза до строений или людей до предварительно установленной величины микроконтроллер 2 формирует предупреждающий сигнал для крановщика (сигнал на устройство индикации 6) или для людей, находящихся в зоне работы крана (сигнал на беспроводное устройство приема/передачи данных 8 и далее на их устройства 13, в частности на личные сотовые телефоны), и/или сигнал блокирования опасных движений крана, поступающий на исполнительные устройства 4.
Для документирования работы крана система может содержать встроенный или внешний регистратор параметров, реализованный на основе блока памяти 7, в который микроконтроллер 2 записывает значения параметров работы крана (нагрузки, пространственного положения стрелы и т.п.), предупреждающих сигналов и сигналов управления краном, видеоизображение процесса подъема и перемещения груза, строповки груза и установки крана на выдвижные опоры, сигналы о местоположении крановщика и людей в зоне работы грузоподъемного крана с целью их последующего считывания для анализа на ЭВМ для оценки эффективности использования крана, контроля соблюдения установленных правил его эксплуатации и для расследования причин возможных отказов и аварий.
В данном описании схематично приведены лишь частные варианты реализации предложенной системы защиты грузоподъемного крана. Изобретение охватывает ее другие возможные варианты исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Литература
1. SU 1654256 A1, МПК5 B66C 23/90, 07.06.1991.
2. US 5730305 A, МПК6 B66C 13/16, 13/18, 24.03.1998.
3. RU 2282577 C2, B66C 23/88, 15/00, 27.08.2006.
Группа изобретений относится к машиностроению и может быть использована в системах защиты и управления грузоподъемных кранов. Способ предусматривает предварительное определение или задание допустимых значений параметров, характеризующих нагрузку и/или пространственное положение стрелы или грузозахватного органа крана, их запоминание, измерение в процессе работы крана этих параметров, сравнение измеренных значений с допустимыми и последующее формирование сигналов управления или блокирование управления исполнительными устройствами с целью предотвращения превышения параметрами допустимых значений. Перед началом работы крана или в процессе подъема и перемещения груза дополнительно реализуется выполнение крановщиком предварительной визуальной проверки технического состояния крана, или выявление наличия людей на пути перемещения крана или груза, или автоматический контроль правильности строповки (обвязки) груза, или автоматическая проверка правильности установки крана на выносные опоры, или оптическое измерение параметров работы крана, или автоматическое изменение параметров координатной защиты с использованием приемников GPS, радиочастотных или инерциальных устройств определения местоположения, расположенных на препятствиях, на одежде или на экипировке людей. По результатам этой проверки или контроля реализуются дополнительные сигналы управления или информационные сигналы, направленные на повышение безопасности работы крана. Группа изобретений позволяет повысить безопасность работы крана и его производительность. 6 н. и 18 з.п. ф-лы, 1 ил.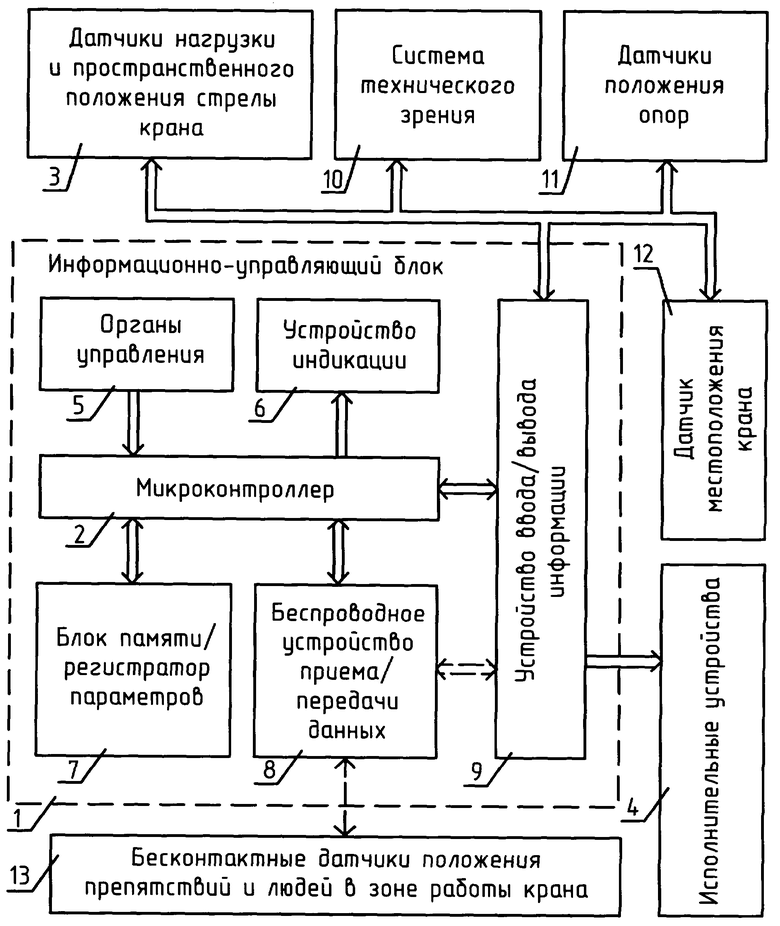
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| RU 2002104444 А, 20.10.2003 | |||
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ГРУЗОПОДЪЕМНОГО КРАНА И КОНТЕЙНЕРОВ НА КОНТЕЙНЕРНОЙ ПЛОЩАДКЕ, ВКЛЮЧАЮЩАЯ ИДЕНТИФИКАЦИЮ КОНТЕЙНЕРОВ И УЧЕТ ИХ ПЕРЕМЕЩЕНИЯ | 2002 |
|
RU2209762C1 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2269483C2 |
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОДЪЕМА КРЮКА СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2096307C1 |
| US 5730305 А, 24.03.1998. | |||

