Изобретение относится к области машиностроения и может быть использовано в системе защиты грузоподъемного крана и управления его нагрузками - габаритным фонарем, фарой рабочего освещения и т.п., расположенными на стреле или на стреловом или грузовом полиспасте этого крана.
Известен способ питания электронной системы защиты грузоподъемного крана, состоящей из соединенных между собой электронных блоков и датчиков, путем передачи напряжения питания от бортовой сети грузоподъемного крана в каждый электронный блок и датчик, стабилизации переданного напряжения и его последующего использования для питания электронной схемы соответствующего блока или датчика [1].
Устройство для осуществления этого способа - стабилизированное устройство электропитания системы защиты крана содержит стабилизаторы напряжения, установленные в каждом блоке и в каждом датчике системы, причем входы стабилизаторов подключены к линиям питания, соединенным с бортовой сетью грузоподъемного крана, а выходы подключены к выводам питания электронных схем блоков и датчиков [1].
Необходимость прокладки проводов питания к каждому блоку и датчику приводит к увеличению трудоемкости ремонта и монтажа системы защиты на кране и к снижению ее надежности. Кроме того, питание блоков и датчиков в этом техническом решении осуществляется только после подачи на систему безопасности напряжения бортовой сети грузоподъемного крана. Это исключает возможность измерения параметров работы крана при отключенном общем напряжении питания системы защиты.
Наиболее близким к предложенному является способ питания системы защиты и управления грузоподъемного крана, состоящей из электронных блоков и датчиков параметров работы крана, заключающийся в хранении электрической энергии, по меньшей мере, в одном автономном источнике питания, оснащении этим источником питания датчика параметров работы грузоподъемного крана и использования электрической энергии автономного источника для питания электронной схемы этого датчика [2].
Устройство для осуществления известного способа питания системы защиты и управления грузоподъемного крана, состоящей из электронных блоков и датчиков, содержит, по меньшей мере, один автономный источник питания - гальванический элемент, гальваническую батарею, аккумулятор и/или солнечный элемент, размещенный в датчике параметра работы грузоподъемного крана и подключенный к цепи питания электронной схемы этого датчика [2].
В этом техническом решении, благодаря применению автономных источников питания и беспроводного канала обмена данными между составными частями системы защиты и управления грузоподъемного крана, обеспечивается сокращение проводных линий связи и соответственно повышение надежности работы и удобства монтажа этой системы на кране.
Однако применение в качестве автономных источников питания гальванических элементов или гальванических батарей приводит к усложнению технического обслуживание этой системы ввиду необходимости их периодической замены. При несвоевременной замене гальванических элементов или батарей происходит недопустимое снижение напряжения питания электронной схемы датчика, что приводит к снижению надежности работы системы защиты и управления крана. Аналогичные недостатки имеет и система с автономными источниками питания в виде аккумуляторов. В этом случае, ввиду отсутствия их автоматической подзарядки, также необходимо техническое обслуживание системы - периодическая подзарядка аккумуляторов, а их постепенный разряд и соответственно низкая стабильность напряжения питания электронной схемы также приводят к снижению надежности работы системы.
Если же в известном техническом решении используются аккумуляторы в сочетании с солнечными элементами, то это также не исключает необходимости технического обслуживания системы, поскольку при работе крана необходима периодическая очистка солнечных элементов от загрязнений. Несвоевременная очистка солнечных элементов приводит к снижению эффективности их работы и соответственно к недопустимо большому разряду аккумуляторов и к снижению надежности работы системы защиты и управления крана.
Кроме того, в известном техническом решении, ввиду ограниченной емкости гальванических элементов, гальванических батарей и аккумуляторов, не представляется возможным обеспечить автономное электрическое питание тех составных частей системы, которые обеспечивают управление мощными нагрузками, например габаритным фонарем и фарой. Это исключает возможность создания датчика длины стрелы без кабельного барабана, поскольку этот барабан в системах защиты кранов традиционно используется не только для измерения длины стрелы, но и для передачи энергии на ее оголовок.
Еще одним недостатком известного технического решения является неработоспособность системы защиты и управления краном при отключенном общем напряжении ее питания.
Техническими результатами, на достижение которых направлено предложенное техническое решение, являются
- расширение функциональных возможностей системы защиты и управления краном за счет обеспечения возможности электрического питания габаритного фонаря, фары рабочего освещения и других электрических нагрузок, размещенных на стреле или на полиспасте грузоподъемного крана;
- повышение надежности системы за счет исключения кабельного барабана при сохранении возможности измерения длины стрелы и управления нагрузками;
- упрощение технического обслуживания системы защиты и управления краном за счет автоматической подзарядки автономного источника питания непосредственно в процессе работы грузоподъемного крана;
- обеспечение возможности работы системы при отключенном общем напряжении питания.
В предложенном способе питания измерительно-управляющей составной части системы защиты и управления грузоподъемного крана, размещенной на его стреле или на полиспасте, заключающемся в хранении электрической энергии в автономном источнике питания, оснащении этим источником питания указанной составной части системы защиты и управления и использовании этой электрической энергии для питания электронной схемы, нагрузок и датчиков этой составной части системы, указанные технические результаты достигаются за счет того, что в этом способе дополнительно преобразуют механическую энергию движущегося грузового или стрелового каната грузоподъемного крана или блока, направляющего или поддерживающего этот канат, в электрическую энергию, которую передают в автономный источник питания, в котором осуществляют ее накопление. В качестве нагрузок используют, в частности, габаритный фонарь и/или фару, а в качестве датчиков - датчик нагрузки в грузовом или стреловом канате и/или датчик приближения к линии электропередачи.
Для достижения указанных технических результатов указанная составная часть системы защиты и управления может быть дополнительно оснащена устройством преобразования солнечной энергии, энергии внешних механических воздействий или тепловой энергии окружающей среды в электрическую энергию, которую передают в автономный источник питания.
Передача результатов измерения параметров работы грузоподъемного крана от указанной составной части системы защиты и управления в ее другую составную часть, а также обратная передача сигналов управления нагрузками могут осуществляться с использованием беспроводного канала обмена данными. Этот канал может быть использован для измерения длины стрелы грузоподъемного крана, для чего, в частности, осуществляется измерение времени распространения (передачи) сигнала по беспроводному каналу обмена данными.
В устройстве для осуществления питания измерительно-управляющей составной части системы защиты и управления грузоподъемного крана, размещенной на его стреле или на полиспасте и выполненной в виде электронной схемы, к которой подключены датчики параметров работы грузоподъемного крана и нагрузки, содержащем автономный источник питания, подключенный к цепи питания электронной схемы, указанный технический результат достигается тем, что это устройство дополнительно содержит электрический генератор, выполненный с возможностью механического взаимодействия с грузовым и/или стреловым канатом, или с блоком, направляющим или поддерживающим этот канат, а также с возможностью преобразования механической энергии перемещения этого каната или блока в электрическую энергию, причем выход генератора непосредственно или через преобразователь тока или напряжения подключен к автономному источнику питания, выполненному в виде аккумулятора или конденсатора.
При этом электрический генератор может быть выполнен с использованием электромагнитной индукции или пьезоэлектрического эффекта. В качестве нагрузок может использоваться габаритный фонарь и/или фара, а в качестве датчиков - тензометрический датчик усилия в грузовом или стреловом канате, датчик усилия в оси направляющего или поддерживающего блока или датчик приближения к линии электропередачи.
Для достижения указанных технических результатов устройство может дополнительно содержать преобразователь солнечной энергии, или энергии внешних механических воздействий, или тепловой энергии окружающей среды в электрическую энергию, выход которого непосредственно или через дополнительный преобразователь тока или напряжения подключен к автономному источнику питания.
Электронная схема может содержать беспроводный интерфейс обмена данными, по меньшей мере, с одной другой составной частью этой системы защиты и управления, а также средства измерения времени передачи сигналов по указанному беспроводному каналу обмена данными и последующего вычисления длины стрелы грузоподъемного крана на основании результатов измерения этого времени. Для упрощения технической реализации измерения длины стрелы беспроводный интерфейс может быть выполнен с использованием излучений различной физической природы для приема и передачи данных, в частности электромагнитного и ультразвукового излучений.
Реализация электрического питания измерительно-управляющей составной части системы защиты и управления грузоподъемного крана, размещенной на его стреле или на полиспасте, с указанными отличительными признаками обеспечивает автоматическую подзарядку автономного источника питания (аккумулятора или конденсатора) непосредственно в процессе работы грузоподъемного крана. Это исключает необходимость проведения технического обслуживания системы защиты и управления краном в части ее электропитания и позволяет получить нормальное значение электрического напряжения питания электронных схем этой системы в любых условиях эксплуатации. Это приводит к повышению надежности системы и обеспечивает возможность ее работы при отключенном общем напряжении питания, в том числе при неисправной бортовой сети грузоподъемного крана.
Преобразование механической энергии движущегося грузового или стрелового каната в электрическую энергию на стреле или на грузовом или стреловом полиспасте позволяет получить мощный источник энергии для беспроводного питания мощных нагрузок, размещенных на удаленных частях грузоподъемного крана, в частности для питания габаритного фонаря и фары рабочего освещения крана. Это обеспечивает расширение функциональных возможностей системы защиты и управления краном.
Поэтому отличительные признаки заявленного технического решения находятся в прямой причинно-следственной связи с достижением указанных технических результатов.
Поясним техническую сущность предложенного способа питания измерительно-управляющих составных частей системы защиты и управления грузоподъемного крана путем описания работы реализующего его устройства.
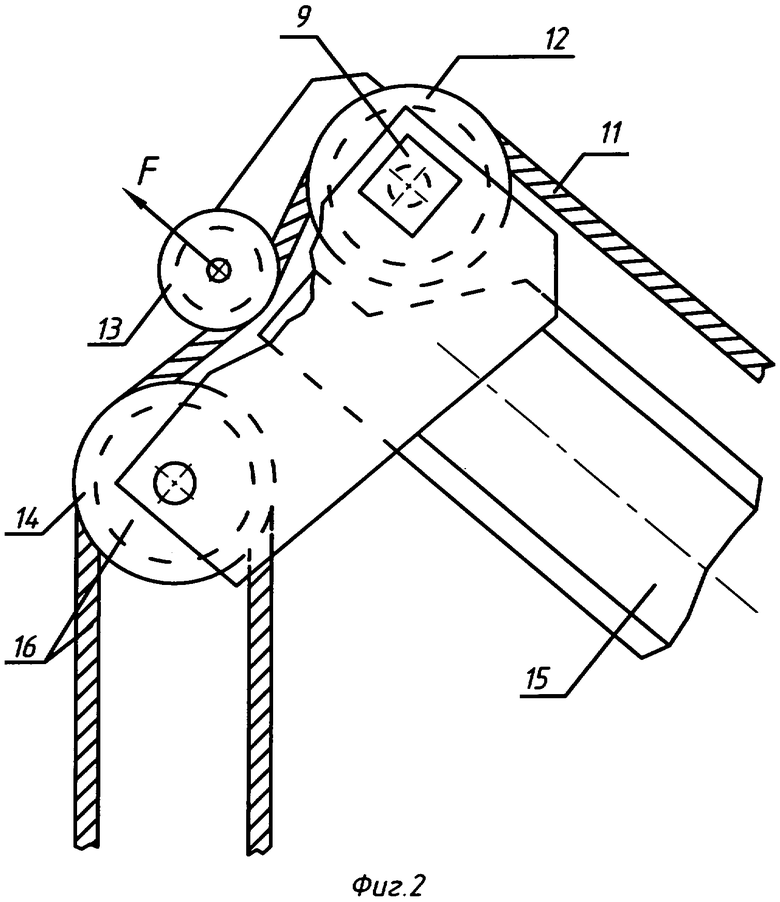
На фиг.1 приведен пример функциональной схемы системы защиты и управления грузоподъемного крана, в которой реализован предложенный способ питания. На фиг.2 - пример размещения на головке стрелы грузоподъемного крана датчика усилия в стреловом канате и электрического генератора, осуществляющего преобразование механической энергии движения этого каната в электрическую энергию.
Система защиты и управления грузоподъемного крана в общем случае состоит из N (1.1, 1.2 ... 1.N), в общем случае различных составных частей, выполненных в виде электронных устройств, осуществляющих измерение параметров работы грузоподъемного крана, обработку информации и управление нагрузками крана - исполнительными механизмами приводов, фарами рабочего освещения, габаритными фонарями и т.д. Часть этих составных частей являются измерительно-управляющими, т.е. осуществляющими как измерение параметров работы крана, так и управление его нагрузками.
Составные части системы могут именоваться контроллерами, модулями, периферийными устройствами контроля и управления и т.п., что не имеет принципиального значения. Одна из таких частей, установленная в кабине грузоподъемного крана и оснащенная органами управления и индикации, используется, как правило, в качестве ведущего или главного устройства системы защиты и управления краном.
По меньшей мере одна измерительно-управляющая часть этой системы размещена на стреле или на полиспасте крана и выполнена в виде аналого-цифровой электронной схемы 2, к которой подключен, по меньшей мере, один датчик параметров работы грузоподъемного крана 3 и, по меньшей мере, одна нагрузка 4. Нагрузки подключены электронной схеме 2, при необходимости, через выходные устройства 5 (силовые ключи, усилители мощности и т.п.). Выходные устройства 5 могут также входить в состав электронной схемы 2.
Электронная схема 2 выполнена, как правило, на основе микроконтроллера, к которому подключены (или входят в его состав) оперативное и энергонезависимое (память программ) запоминающие устройства и интерфейсные схемы, а также, в случае необходимости, часы реального времени, блок памяти регистратора параметров и т.п.
Питание электронной схемы 2, датчиков 3 и нагрузок 4 (выходных устройств 5) осуществляется от автономного источника питания 6, выполненного в виде аккумулятора или конденсатора.
Составные части системы 1.1, 1.2 ... 1.N соединены между собой при помощи проводного или беспроводного канала обмена данными 7. Соответственно, в состав интерфейсных схем каждой электронной схемы 2 входит трансивер, контроллер или драйвер последовательного мультиплексного канала связи - CAN, UN и т.п., или беспроводного канала обмена данными Wi-Fi, Bluetooth, ZigBee и т.п., или канала обмена данными по отдельным проводам.
Составная часть системы, размещенная на стреле или на полиспасте грузоподъемного крана, имеет преимущественно беспроводный канал обмена данными.
В состав ведущей составной части системы входят органы управления и/или индикации 8 (набор кнопок, клавиш, символьных и единичных индикаторов и т.п.). При необходимости эти органы могут входить в состав любых других составных частей системы 1.1, 1.2 ... 1.N.
Датчики 3 могут быть выполнены в виде тензометрического датчика силы или тензометрических датчиков давления, установленных в штоковой и поршневой полостях гидроцилиндра подъема, потенциометрического датчика угла азимута и длины стрелы (датчика угла поворота кабельного барабана), микромеханического акселерометра - датчика угла наклона стрелы, датчика приближения к линии электропередачи и т.п. Необходимый набор датчиков 3 и соответственно параметров работы крана, подлежащих измерению, определяется конструкцией конкретного грузоподъемного крана и требованиями, предъявляемыми к его системе защиты и управления. Усилительно-преобразовательные устройства, необходимые для работы датчиков 3, могут быть встроены либо в эти датчики, либо в электронную схему 2, например, в виде аналого-цифрового преобразователя микроконтроллера.
Подзарядка автономного источника питания 6 осуществляется от электрического генератора или преобразователя энергии 9, выходной сигнал которого, при необходимости, подлежит преобразованию по уровню выходного напряжения или тока при помощи преобразователя тока или напряжения 10, выполненного в виде устройства заряда автономного источника питания 6.
Генератор 9 предназначен для преобразования механической энергии линейного перемещения грузового или стрелового каната 11 или вращения блока 12-14, направляющего или поддерживающего этот канат, в электрическую энергию (фиг.2). Этот генератор 9 и датчик 3, в рассматриваемом примере - датчик усилия в стреловом канате могут быть размещены на головке стрелы 15 грузоподъемного крана.
Грузовой канат 11, огибая направляющий канатный блок 12, смонтированный на оси между щеками головки стрелы, поступает на второй направляющий канатный блок 14. Канат 11 взаимодействует с отклоняющим блоком (роликом) 13. Сила F, воздействующая на этот блок (ролик) 13, пропорциональна усилию в грузовом канате 10 и измеряется при помощи тензометрического датчика 3, встроенного в ось отклоняющего блока 13.
Приводной вал генератора 9 непосредственно или через согласующий редуктор, связан, например, с осью направляющего блока 12. Движение каната 11 в процессе подъема/опускания груза краном приводит к вращению блока 12 и приводного вала генератора и соответственно к генерации электрической энергии, которая непосредственно или через дополнительный преобразователь тока/напряжения 10 поступает в источник питания 6, осуществляя его подзарядку. В итоге механическая энергия периодических движений каната 11, преобразованная в электрическую энергию, обеспечивает непрерывное питание электронной схемы 2, датчика (датчиков) 3 и нагрузок 4 соответствующей составной части 1.1...1.N системы защиты и управления крана.
Измерительно-управляющая составная часть 1.1...1.N системы защиты и управления краном может быть установлена также в любой другой части грузоподъемного крана, в частности на нижней подвижной обойме грузового полиспаста 16. В этом случае приводной вал генератора 9 соединяется с одним из блоков этого полиспаста, например с блоком, имеющим наибольшую скорость вращения при подъеме/опускании груза.
Управление краном осуществляется крановщиком путем воздействия на органы ручного управления исполнительными механизмами крана (на чертежах условно не показаны) и на органы управления 8. Микроконтроллер электронной схемы 2 составной части системы защиты и управления краном, исполняющей роль центрального блока этой системы, работая по программе, записанной в памяти этого микроконтроллера, после получения информации о значениях параметров работы грузоподъемного крана и управляющих воздействиях крановщика, формирует сигналы управления краном (за исключением управляющих воздействий, формируемых в ручном режиме). Сигналы управления по каналу обмена данными 7 поступают на выходные устройства 5 составных частей 1.1...1.N системы защиты и управления краном, осуществляя включение/отключение соответствующих нагрузок 4 (электромагнитов, ламп и т.п.). Одновременно микроконтроллер центрального блока определяет текущую нагрузку крана и положение его грузоподъемного (стрелового) оборудования. Допустимые величины нагрузок крана для различных пространственных положений его стрелы хранятся в памяти центрального блока в виде грузовых характеристик крана. Зона допустимых положений стрелового оборудования крана вводится крановщиком при помощи органов управления 8 при задании режимов работы и параметров координатной защиты крана и также сохраняется в памяти микроконтроллера центрального блока.
После сравнения фактической нагрузки крана с предельно-допустимой, а также сравнения фактического положения стрелового оборудования с параметрами зоны допустимых положений центральный блок передает сигналы управления нагрузками 4 (например, электромагнитами гидрораспределителей), разрешая или блокируя работу исполнительных механизмов грузоподъемного крана. Благодаря этому обеспечиваются защита крана от перегрузки и координатная защита.
В отдельных случаях энергии, получаемой от генератора 9, недостаточно для питания нагрузок 4. Это имеет место в случаях, когда, например, грузоподъемный кран длительное время находится в транспортном режиме с включенным габаритным фонарем, а операции подъема/опускания груза не осуществляются и соответственно грузовой и стреловой канаты остаются неподвижными. В этих случаях в системе может использоваться дополнительный преобразователь солнечной энергии, или энергии внешних механических воздействий, или тепловой энергии окружающей среды в электрическую энергию (на чертежах условно не показан). Выход дополнительного преобразователя непосредственно или через дополнительный преобразователь тока или напряжения также подключается к автономному источнику питания 6 и используется для его подзарядки. Принципы построения таких преобразователей известны. Например, преобразователь механической энергии транспортной тряски в электрическую энергию может быть выполнен в виде инерционной массы на упругом подвесе с электромагнитным или пьезоэлектрическим преобразователем энергии колебаний или перемещений этой массы в электрическую энергию.
Реализация достаточно мощного генератора электрической энергии 9 на головке стрелы 15 позволяет осуществить электрическое питание габаритного фонаря и фары рабочего освещения, расположенных на этой головке, без применения кабельного барабана, традиционно использующегося для передачи энергии на головку стрелы.
Измерение длины стрелы в ранее известных системах защиты и управления краном осуществляется, как правило, путем измерения угла поворота кабельного барабана при сматывании с него кабеля при выдвижении/втягивании телескопической стрелы. В предложенном техническом решении, в случае исключения кабельного барабана, необходимо реализовать альтернативные способы бесконтактного измерения длины стрелы.
Один из таких способов основан на измерении времени прохождения сигналов между двумя составными частями системы защиты и управления грузоподъемного крана, установленными на неподвижной и на подвижной секциях телескопической стрелы. В этом случае эти составные части системы оснащаются соответствующими приемниками/передатчиками излучения, которые целесообразно выполнить в виде беспроводного интерфейса обмена данными между этими составными частями системы. Т.е. измерение длины стрелы целесообразно совместить с передачей данных в системе.
При этом для упрощения измерения длины стрелы обмен данными между составными частями системы можно реализовать с использованием излучений различной физической природы. Например, для передачи данных с головки на корневую секцию стрелы можно использовать электромагнитное излучение (радиосигнал), а в обратном направлении - ультразвуковое излучение. В этом случае для измерения длины стрелы будет использоваться измерение времени распространения ультразвукового сигнала между указанными составными частями системы защиты и управления краном. Это время, ввиду небольшой скорости распространения ультразвука по сравнению с радиосигналом, имеет величину, удобную для прямого измерения при помощи микроконтроллеров аналого-цифровых электронных схем 2.
Из изложенного следует, что в предложенном техническом решении обеспечивается повышение надежности и упрощение технического обслуживания системы защиты и управления краном за счет ее реализации без кабельного барабана, а также расширение функциональных возможностей системы за счет обеспечения электрического питания и управления габаритным фонарем, фарой рабочего освещения и другими нагрузками, размещенными на стреле или на полиспасте грузоподъемного крана.
Источники информации, использованные при составлении заявки
1. JP 59074895, МПК3 B66C 23/90; G05F 1/58, 27.04.1984.
2. RU 2251524 C2, МПК7 B66C 13/18, 15/00, 23/88, 10.05.2005.
Изобретение относится к машиностроению и может быть использовано в системах защиты и управления грузоподъемных кранов. Способ питания измерительно-управляющей составной части этой системы, размещенной на стреле или на полиспасте грузоподъемного крана, заключается в применении автономного источника питания с автоматической подзарядкой этого источника от генератора - преобразователя механической энергии движущегося грузового или стрелового каната грузоподъемного крана или блока, направляющего или поддерживающего этот канат, в электрическую энергию. Эта составная часть системы защиты и управления крана осуществляет измерение, по меньшей мере, одного параметра его работы, а также управление нагрузками, в частности габаритным фонарем и/или фарой. Для подзарядки автономного источника питания, кроме энергии движения каната, дополнительно может использоваться энергия внешних механических воздействий, солнечная энергии или тепловая энергия окружающей среды. Передача данных между составными частями системы может осуществляться по беспроводному каналу обмена данными. Изобретение позволяет упростить техническое обслуживание, повысить надежность, а также обеспечить работоспособность системы защиты и управления крана. 2 н. и 14 з.п. ф-лы, 2 ил.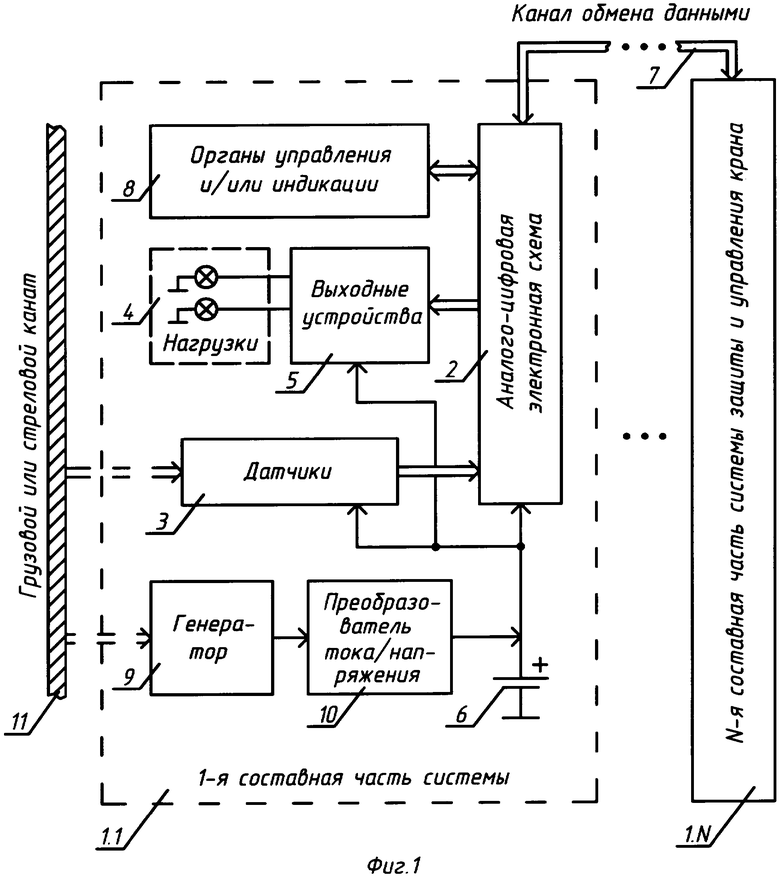
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| JP 59074895 A, 10.05.2005 | |||
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| DE 3435581 A1, 03.04.1986 | |||
| СИСТЕМА АВТОНОМНОГО ЭЛЕКТРОСНАБЖЕНИЯ | 1992 |
|
RU2025863C1 |
| ЭЛЕКТРОМОБИЛЬ | 1992 |
|
RU2048309C1 |

