Изобретение относится к способам обработки изображений для определения их геометрических характеристик, позволяющих определить без операционного вмешательства состояние органов человека. Изобретение относится к медицине, в частности к рентгенологии, магниторезонансной томографии, может использоваться для диагностики заболеваний внутренних органов и изучения прижизненной анатомии и топографии внутренних органов. Способ могут использовать в математическом и программном обеспечении медицинского оборудования. Для осуществления способа возможно применять как простое проекционное оборудование, так и оборудование, позволяющее получать проекции изображений органов с помощью рентгеновских лучей или магнитно-резонансной томографии.
Известно изобретение «СПОСОБ МОДЕЛИРОВАНИЯ ОПЕРАТИВНОГО ВМЕШАТЕЛЬСТВА НА ВНУТРЕННИХ ОРГАНАХ», заявка RU №2000105296, МПК А 61 В 6/02, в соответствии с которым осуществляют моделирование оперативного вмешательства, включающий проведение рентгеновской спиральной компьютерной томографии для построения трехмерной реконструкции томографического изображения внутренних органов. Однако данный способ позволяет моделировать изменение органа при оперативном воздействии, но не позволяет оценить объемы отдельных структур органа и определить их точный объем. Известно изобретение «Способ автоматического расчета формы объемных тел», заявка RU №98103621, заключающийся в обработке полутоновой информации, полученной на основе трех снимков и сравнения их с калибровочными снимками. Однако данный способ трудно осуществим, т.к. исследуемый объект и калибровочные кривые должны находиться приблизительно в одном месте и должны быть соизмеримы. Способ трудно осуществить и он дает приблизительные результаты, которые слишком рискованно использовать при лечении.
Известно изобретение «Способ построения изображений трехмерных объектов на двумерной поверхности», RU №2000109789, МПК G 06 T 17/00, включающий представление объекта в памяти в виде множества пространственных координат и их преобразование в множество «экранных» координат, использующей корректирующие функции. Однако способ позволяет осуществить имитацию визуального трехмерного пространства, но не ставит задачу расчета объема тел. Значение регулирующего параметра корректирующей функции задают на основе непосредственного измерения пространственных параметров тел, что невозможно при исследовании органа без оперативного вмешательства.
Известно изобретение «Способ изучения прижизненной топографии», патент RU №2171465, МПК G 01 N 24/08, G 01 N 23/04, А 61 В 5/055, заключающийся в том, что изучаемое изображение внутренних органов оценивают системой координат со стандартной скелетооптической привязкой. Измеряют площади среза и объем органа в зависимости от степени удаления от середины тела позвонка. Изображение внутренних органов, полученное диагностическими методами исследования (компьютерная томография, ядерно-магнитный резонанс), совмещается с разработанной системой координат. Совмещение может производиться либо в виде компьютерного совмещения изображений с применением компьютерных программ, либо непосредственно накладывая координатную сетку. Однако с помощью данного метода можно точно определить площадь среза органа, но не его объем. Кроме того, применяется жесткая привязка к середине позвонка, что дает большие погрешности привязки. Кроме того, с помощью данной системы координат невозможно точно форму внутренних полостей органа. Способ действует по принципу наложения палетки. Однако наложение координатной сетки не решает задачу получения точных исходных данных для расчета объема, т.к. координатная сетка может быть наложена только на сечение органа. Увеличение количества сечений органа не решает задачу повышения точности расчета, т.к. невозможно определить кореллирующая зависимость между совокупностью дискретных сечений и истинным объемом органа.
Наиболее близким техническим решением является изобретение «Устройство и способ создания изображений и носитель программ и данных», заявка RU №2000100280, МПК G 06 T 17/00, с помощью которого обрабатывается объемное или плоское изображение органа, причем изображение разбивается на элементы графических форм с разбивкой на подэлементы. Разбивка осуществляется с использованием интерполяционных линий, определяется линия, которая интерполирует пространство между двумя вершинами по вектору и затем интерполируют пространство между заданной вершиной и любой другой. Однако способ сложный и позволяет только построить объемное изображение органа, но не ставит задачу расчета его объема.
Задачей предложенного технического решения является точный подсчет объема органа больного для осуществления диагностики патологии, определения объема патологических образований, полостей, областей структурных изменений в тканях органа, а также определение точного объема неработоспособного органа до осуществления имплантации органа донора.
Известные способы определения объемов органа у больного без инвазивного вмешательства, в которых осуществляют расчет либо на основе исходных данных, полученных при измерении наибольшего размера трех плоских проекций органа, либо на основе очень сложного математического построения объемной модели органа. Такие методы не дают требуемой точности расчета, т.к. либо недостаточно исходных данных для математического расчета, либо недостаточно исходных данных для построения точной модели.
Предложенное техническое решение «способ определения объема органов при медицинском обследовании» позволяет существенно упростить способ расчета при уменьшении погрешности.
Предложенный способ позволяет наиболее простым образом получить исходные величины для расчета объема органа, обеспечивающие точность расчета.
Технический результат достигается следующим образом.
Получают проекции изображений органа на любые две или три ортогональные плоскости (ОП), зафиксированные относительно органа, посредством системы отображения, разбивают проекции изображения на сегменты, которые получают посредством линий, являющихся следом секущих плоскостей (СП) на ОП, причем СП разделены на множества, в пределах каждого множества все СП параллельны друг другу, все СП одного множества перпендикулярны хотя бы одной ОП, СП любого множества перпендикулярны СП любого другого множества, минимальное число СП равно трем, и все они принадлежат разным множествам, а расстояния между СП одного множества выбраны произвольно, при этом образуют сегменты проекций изображения двух типов:
- сегменты первого типа образованы как части проекции изображения, отсекаемые частями двух соседних следов СП на ОП одного множества и частями двух соседних следов СП на то же ОП другого множества, причем СП перпендикулярны той же ОП и/или
- сегменты второго типа образованы как части проекции изображения, отсекаемые частями следов двух соседних СП на ОП одного множества, контуром проекции изображения, заключенным между этими СП и ближайшей к контуру проекции изображения частью следа СП на тоже ОП другого множества, причем СП перпендикулярны той же ОП и крайние точки частей следов СП на ОП одновременно принадлежат контуру проекции изображения и этой же ОП, затем формируют проекцию объемного элемента органа на соответствующую проекцию изображения ОП, для чего принимают в качестве объемного элемента четырехугольную усеченную пирамиду (ЧУП) или сегмент объемной фигуры, образованный частями двух соседних СП одного множества, одной цилиндрической поверхностью или двумя сопряженными цилиндрическими поверхностями разного диаметра, ось которых перпендикулярна этим СП и ближайшими к контуру проекции изображения частями СП двух других множеств, которые взаимно перпендикулярны между собой. Причем количество взаимно перпендикулярных СП, образующих объемный элемент совместно с цилиндрическими поверхностями может быть равно четырем или пяти. Далее вписывают проекцию объемного элемента в каждый сегмент проекции изображения таким образом, чтобы его проекция на ОП совпадала с частями соседних следов СП на ОП, ограничивающих сегмент проекции изображения на ту же ОП, а одна из граней проекции объемного элемента одновременно принадлежала контуру проекции изображения и частям соседних следов СП на ОП, при этом проекциями граней ЧУП являются отрезки, крайние точки которых одновременно принадлежат контуру проекции изображения и соседним отрезкам следа СП на ОП одного множества или двум соседним отрезкам следов СП на ОП одного множества и перпендикулярным им отрезкам следов СП на ОП другого множества, образующим тот же сегмент проекции изображения. Проекциями граней сегмента объемной фигуры является дуга, крайние точки которой, одновременно принадлежат двум соседним отрезкам следов СП на ОП одного множества (i-го) и перпендикулярным им отрезкам следов СП на ОП другого множества, образующим тот же сегмент проекции изображения или соседним отрезкам следов СП на ОП одного множества и контуру проекции изображения в виде отдельной для каждого сегмента проекции изображения на каждую ОП кривой, параметры которой характеризуются коэффициентами полинома второй степени, заданного в текущей системе координат, выбранных из условия равенства площадей проекции вписанного сегмента объемной фигуры и сегмента проекции изображения, причем каждая система координат имеет начало в любой точке пересечения частей следов взаимно перпендикулярных СП на ОП, образующих сегмент проекции изображения на это же ОП и оси, совпадающие со следами этих СП на ОП. Затем получают модель сегмента объемного изображения органа, приближенную к реальному изображению органа и заменяющую реальный сегмент объемного изображения, осуществляют количественное оценивание объема модели изображения органа по проекциям изображения. Для оценивания определяют величины частей следов СП на каждую из выбранных двух ОП, принадлежащих одному сегменту проекции изображения на основании модели сегмента объемного изображения для каждой пары проекций модели изображения органа на любые две ОП. Для объемного элемента в виде ЧУП определяют объем каждой ЧУП как произведение полусумм противоположных следов СП в пределах одного сегмента проекции изображения на каждую из выбранных ОП и высоты ЧУП, значения объемов ЧУП суммируют. Для объемного элемента в виде сложного объемного элемента на основе цилиндрических поверхностей и взаимно перпендикулярных СП определяют объем сегментов первого типа в текущей системе координат, как произведение значений трех частей следов взаимно перпендикулярных СП, образующих объемный сегмент, затем определяют объем сегмента второго типа в текущей системе координат, как интегралы от произведения значений полиномов от 0 до значения длины части следа двух соседних СП одного множества и значения объемов сегментов суммируют. После осуществляют подсчет объема органа путем суммирования объемных сегментов, построенных на основе хотя бы двух произвольно выбранных сочетаний ОП, на которые проецируют эти объемные сегменты и выбирают значение объема органа исходя из условия оптимальной его величины, например, минимизации рисков в соответствии с медицинским диагнозом.
Способ поясняется чертежами, на которых изображены:
фиг.1 - две проекции изображения органа со следами секущих плоскостей (СП) на две ортогональные плоскости I и II;
фиг.2 - объемный элемент первого типа - четырехугольная усеченная пирамида (ЧУП);
фиг.3 - объемный элемент второго типа - сегмент объемной фигуры;
фиг.4 - график зависимости относительной погрешности определения объема органа Р от числа N секущих плоскостей (СП). Где Ро - относительная погрешность, полученная при определении объема органа по трем максимальным измерениям; Рчi - относительная погрешность объема органа, рассчитанного на основе объемных элементов первого типа для i-го множества; Рцi - относительная погрешность объема органа, рассчитанного на основе объемного элемента второго типа для i-го множества.
Предложенный способ изобретения осуществляется следующим образом.
С помощью магниторезонансного томографа, например, аппарата «Магнетом Симфония» (Magnetom Symphony) с напряженностью магнитного поля 1,5 тесла, выделяют исследуемый орган или область органа, представляющую интерес для медицинской диагностики, получают на экране монитора любую из выбранных проекций органа. При необходимости, несколько проекций органа, выбранных по срезам, которые определяет врач исходя из медицинских показаний, выводят в окнах экрана монитора одновременно. Проекции органа могут быть выбраны под произвольными углами.
Сущность предложенного способа состоит в том, что при расчете объема органа используют его проекции (А, Б) (фиг.1) на разные ортогональные плоскости, например, I и II (фиг.1), получая множества значений объема органа. На ортогональных проекциях размещают проекции органа или образований с соблюдением ограничивающих условий, определяют следы проекций (1-6) секущих плоскостей на ортогональных плоскостях I - координаты YOZ, II - координаты ZOX или III - координаты XOY (фиг.3), получая плоские сегменты ("а, b, с" или "d, e, f, k"). Сочетание ортогональных плоскостей также выбирают произвольно, а их число - исходя из требуемой точности определения объема органа - либо две, либо три. На тех же ортогональных плоскостях размещают проекции объемных элементов (фиг.2 или 3) таким образом, чтобы проекции их поверхностей (7) или следы (8) от сечения поверхностей были совмещены либо с контуром изображения (9), либо со следами проекций секущих плоскостей (1-6). При этом используют объемный элемент либо в виде четырехугольной усеченной призмы (фиг.2), либо сегмент объемной фигуры (фиг.3). Вершина (О) координат размещается в каждом объемном элементе на пересечении ортогональных поверхностей данного элемента. После совмещения проекций объемного элемента с сегментами (А или Б) изображения, которые образованы в результате размещения проекций секущих плоскостей на проекции изображения, получают несколько плоских фигур с множеством отрезков (ai, bi, сi, di, hi), которые измеряются для каждого сегмента изображения, совмещенного с проекцией на эту же ортогональную плоскость объемного элемента. С подготовленных проекций органа снимают исходные данные путем измерения каждого i-го отрезка (a, в, c, d, h) сегмента для каждого сегмента каждого j-го множества величин.
Далее рассчитывают объем каждого объемного элемента по величинам отрезков, измеренных для каждой отдельной ортогональной поверхности и складывают j-oe множество величин объемных элементов, полученных на основе исходных данных, полученных на одной ортогональной поверхности. Получают несколько величин объема органа, определенного по исходным величинам отрезков каждой из ортогональных плоскостей. Выбирают ту величину объема органа, которая для конкретной медицинской задачи является наиболее оптимальной. Например, при трансплантации органа или его части важно точно определить объем органа для подбора донорского трансплантата или определить часть органа, достаточную для пересадки. Ошибка в большую сторону не внесет отрицательных последствий, в меньшую - может привести к гибели реципиента. Для определения объема опухоли, которую следует удалить посредством операционного вмешательства, ошибка в меньшую сторону может привести к тому, что часть опухоли при удалении останется, что потребует повторного вмешательства. Точное определение объема печени в динамике печени способствует оценке проводимой терапии, уточнению объема лечения и его сроков т.д.
Оценивание погрешности предлагаемого способа осуществляется по следующему алгоритму:
1) определяется объем V модельного органа путем погружения его в воду;
2) рассчитывается контрольный объем органа как половина произведения трех максимальных измерений (фиг.1) по формуле Vo=1/2·А·Б·В;
3) определяется соответствующая относительная погрешность (в процентах), которая принимается за постоянную величину сравнения:

4) двухпроекционное изображение органа последовательно разбивается на четыре, шесть, восемь, девять и т.д. сегментов следами равноотстоящих СП;
5) для каждого i-го объемного элемента вычислялся объем с использованием ЧУП (фиг.2), который расчитывается как произведение расстояния между параллельными СП-h на полусуммы величин проекций противоположных СП в пределах каждого сегмента объемной фигуры

где j - номер множества величин, характеризующих изображение полученные объемы суммировались по формуле 
и соответствующее значение принималось за объем органа - Vчi.
Для определения объема органа на основе объемных элементов второго типа действуют на основе следующего алгоритма:
1) объем каждого сегмента с использованием объемных элементов на основе цилиндрических поверхностей (фиг.3 - объемные элементы) определялся как интеграл от нуля до величины расстояния между параллельными СП-h от произведения значений функций в текущих системах координат (XOY, XOZ), принадлежащих одному сегменту, которые описывают дуги и соответствуют одному и тому же значению аргумента

2) полученные объемы суммируют и соответствующее значение принимают за объем органа - Vцi
3) для каждого их числа определяют относительную погрешность Рч:

4) полученные значения Ро, Рцi, Рчi сравнивались между собой.
Результаты сравнения представлены на графике (фиг.4). Они показывают, что при разбиении на четыре сегмента (i=1) Рчi>Рцi>Ро. При i>= наблюдалось, что Ро>Рчi>Рцi. При этом с ростом i погрешности Рчi и Рцi уменьшались, сохраняя отношение Рчi>Рцi на 1-2% на исследуемом интервале.
На основании вышеприведенных примеров видно, что предложенный способ подсчета позволяет получить точность величины объема органа, его части или объемных образований в несколько раз выше, чем подсчет объема, применяемый до настоящего времени. Например, при магниторезонансной томографии с применением аппаратов фирмы Siemens предложенный способ позволяет осуществлять сложную диагностику заболеваний головного мозга, измерение объемов образований в головном мозге, что является важной задачей при оперативном и стереотаксическом лечении его опухолевых заболеваний. Кроме того, решение задачи точного определения объема органов важно при планировании необходимого объема органа для данного донора и достаточном объеме органа у реципиента.
Изобретение относится к медицине, в частности к рентгенологии, магниторезонансной томографии, может использоваться для диагностики заболеваний внутренних органов и изучения прижизненной анатиомии и топографии внутренних органов, а именно к способу обработки изображений для определения их геометрических характеристик, позволяющих определить без операционного вмешательства состояние органов человека. Способ определения объема органов или образований состоит в том, что получают проекции изображений органа на любые две или три ортогональные плоскости, зафиксированные относительно органа, посредством системы отображения, разбивают проекции изображения на сегменты, которые получают посредством линий, являющихся следом секущих плоскостей на ортогональные плоскости, причем секущие плоскости разделены на множества, в пределах каждого множества все секущие плоскости параллельны друг другу, все секущие плоскости одного множества перпендикулярны хотя бы одной ортогональной плоскости и секущие плоскости любого множества перпендикулярны секущим плоскостям любого другого множества, минимальное число секущих плоскостей равно трем и все они принадлежат разным множествам, а расстояния между секущими плоскостями одного множества выбраны произвольно, образуют сегменты проекций изображения двух типов. Способ позволяет упростить метод определения объемов органов или образований и снизить погрешности при их определении. 4 з.п. ф-лы, 4 ил.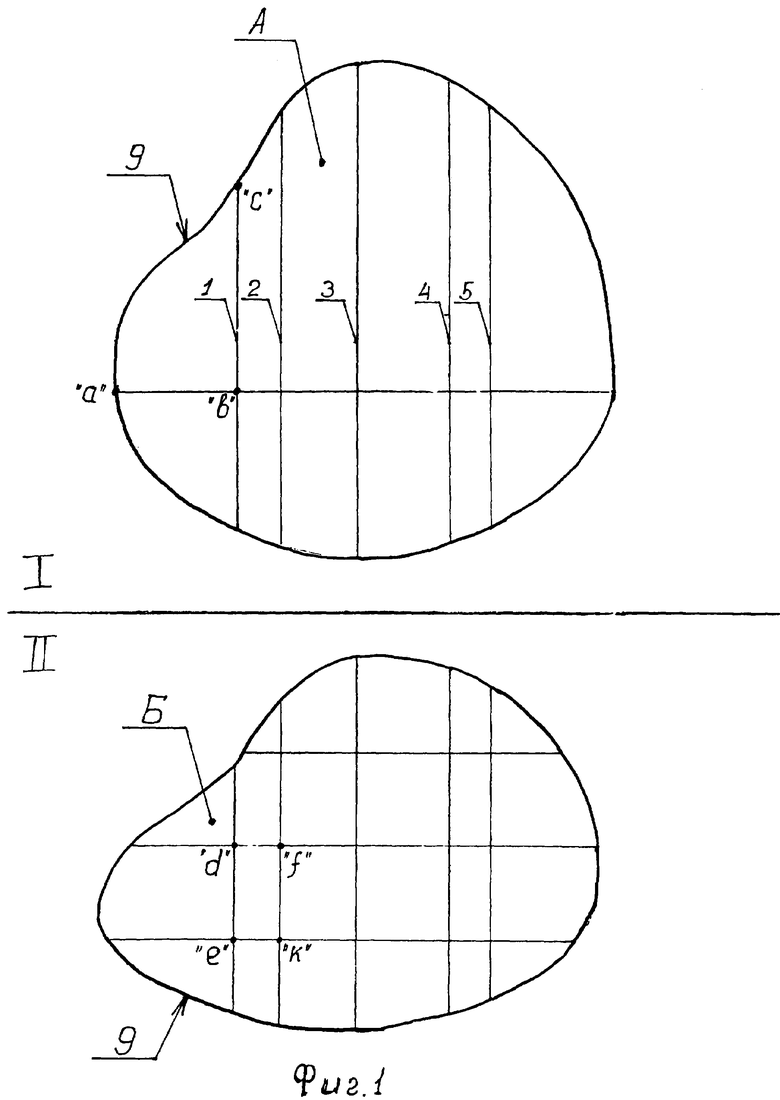
| СПОСОБ ИЗУЧЕНИЯ ПРИЖИЗНЕННОЙ ТОПОГРАФИИ | 1999 |
|
RU2171465C1 |
| RU 2000109789 A, 27.03.2002 | |||
| КУШНАРЕВИЧ Р.Л | |||
| и др | |||
| Рентгенорадиологические методики топографо-аналитической визуализации некоторых эндокринных органов | |||
| Вопросы эндокринологии | |||
| Алма-Ата, 1989, с.91-92. | |||

