Область техники
Изобретение относится к области размерного контроля при помощи рентгеновских лучей изготовленных объектов, образующих серийный ряд объектов.
В частности, задачей изобретения является получение при помощи рентгеновских лучей измерения линейных размеров, то есть длин, измеряемых на изготовленных объектах в общем смысле этого слова, например, на сосудах, на отлитых или механически обработанных деталях, на механических деталях, упаковках, элементах кузова.
Предшествующий уровень техники
Из предшествующего уровня техники известны различные технологии размерного контроля объектов при помощи рентгеновских лучей. Известны также системы контроля багажа, которые предназначены не для измерения размеров известных объектов, а для обнаружения запрещенных объектов или количеств запрещенных материалов, находящихся в практически случайных положениях, формах и количествах.
Так, известны системы с осевым вращением, частью которых является компьютерная томография или СТ (“computed tomography”). Этот классический метод описан в статье J.P.Kruth(1) et al. “Computed tomography for dimensional metrology”, напечатанной в CIRP Annals, том 60, выпуск 2, 2011, стр. 821-842 и применяется, например, при помощи томографов, выпускаемых компаниями Werth Messtechnik или General Electric.
Этот метод состоит в позиционировании объекта между рентгеновской трубкой и матричным или линейным рентгеновским датчиком изображений на плите, вращающейся вокруг вертикальной оси. Во время вращения производят съемку большого количества (не менее 100 и часто более 600) двухмерных рентгеновских изображений объектов. Если датчик изображений является матричным, пучок является коническим. Если датчик изображений является линейным, пучок предпочтительно ограничен в виде веера (“fan beam”) в плоскости, ортогональной к оси вращения, и вращение сопровождается поступательным движением вдоль вертикальной оси вращения для полного сканирования спирального типа. Этот метод позволяет получать трехмерные измерения высокой точности. Однако время съемки занимает по меньшей мере одну минуту для самых быстрых систем, и к нему добавляется время, необходимое для загрузки и выгрузки объектов, поэтому за час можно проверить максимум 10-30 объектов.
Другое, так называемое решение с вращающейся рамой, было предложено осуществлять, например, при помощи аппарата, известного под названием “speed⏐scan CT 64”, выпускаемого компанией General Electric Company. Как и некоторые 3D-сканеры для багажа, это решение по своей концепции похоже на медицинские томографы с точки зрения относительных движений между источником, объектом и датчиком изображений. Действительно, изготовленные объекты или предметы багажа, расположенные на конвейере, совершают в аппарате поступательное движение. Они пересекают плоскость проекции, ортогональную к направлению перемещения. В круглой раме, содержащей указанную плоскость, вокруг центральной оси перемещения вращают источник рентгеновских лучей и, как правило, изогнутый датчик изображений, расположенный противоположно к источнику, чтобы срез за срезом или посредством спирального сканирования получить проекции, необходимые для трехмерной реконструкции при помощи алгоритма, применяющего, например, метод «фильтрованного обратного проецирования» или метод ART. Задачей этих аппаратов является обеспечение получения очень большого количества проекций на каждом обороте рамы, например, 100, даже 700-1000 изображений на каждый срез. Трехмерную реконструкцию объектов осуществляют, например, срез за срезом. Действительно, определив ослабление в любой точке среза и связав между собой срезы, полученные во время перемещения объекта, получают значение ослабления в любом элементе объема объекта.
Хотя эти аппараты с вращением вокруг вертикальной оси или с вращающейся рамой являются очень точными, благодаря большому числу получаемых изображений, они являются дорогими и медленными и на практике предназначены для нелинейного контроля, так как не приспособлены к линейному размерному контролю при скоростях, которые могут достигать и превышать 600 изделий в минуту при скорости движения в 1 м/с.
В патентной заявке DE 10 2014 103137 описан способ определения геометрических характеристик на обрабатываемой детали при помощи системы томоденситометрических детекторов, состоящей из источника рентгеновских лучей, плоского детектора и механической оси для приведения во вращение детали или для вращения источника рентгеновских лучей и детектора.
Способ позволяет получать рентгенографические изображения во время вращения и обеспечивает отображение поверхности, используя модель поверхности. Такой способ позволяет избежать осуществления этапов реконструкции объемных данных, чтобы сократить время вычисления. Такая технология не позволяет измерять изготовленные детали с высокой скоростью, так как она требует загрузки детали на вращающийся стол, затем поворота по меньшей мере на 180°, затем ее выгрузки для контроля другой детали.
Чтобы устранить недостатки, связанные с трубкой и датчиком изображений, установленными на вращающейся раме, в патенте US 8 971 484 описана система контроля багажа, в которой вращающаяся система заменена сетью стационарных многопучковых источников рентгеновских лучей, последовательно приводимых в действие для создания виртуального перемещения источников рентгеновских лучей, что позволяет получать большое число рентгенографических изображений с разными углами проекции. По сравнению с системами физического вращения, ограниченными скоростью в 4 оборота в секунду, число «виртуальных вращений» доведено до 40 оборотов в секунду. Эту технологию применяют при помощи аппарата, известного под коммерческим названием Rapiscan RTT, компании Rapiscan Systems, и она позволяет проверять 1 200 предметов багажа в час, снимая десятки тысяч двухмерных изображений багажа, если учитывать, что виртуальное вращение дает примерно 40 разных углов проекции.
Эта технология оказалась очень дорогой по причине высокой стоимости с учетом многочисленных источников рентгеновских лучей и мощности вычисления, необходимой для обработки очень большого объема данных. Кроме того, скорость контроля тоже ограничена и не предназначена для линейного контроля.
В патентах US 7 319 737 и US 7 221 732 предложено производить контроль багажа при помощи технологии, называемой цифровой ламинографией или томосинтезом. Предметы багажа последовательно пересекают плоскости конических проекций, называемые “fan beam”, каждая из которых содержит пару линейных датчиков изображений, расположенных в виде L. Эти методы предназначены для обнаружения оружия или взрывчатых веществ в багаже, который содержит объекты разной формы и из самых разных материалов, путем визуализации их трехмерных положений и оценивая, например, объем подозрительного объекта. Часто применяют мультиспектральную технологию, чтобы определить также атомный номер материала. Таким образом, эти системы призваны определять значение ослабления в любой точке багажа. С другой стороны, эти системы не могут определять с высокой скоростью и с точностью размеры изготовленных объектов с целью контроля качества.
В патентной заявке JP S60 260807 предложено измерять толщину стенок трубы, поступательно перемещающейся вдоль оси трубы, посредством измерения при помощи рентгеновских лучей, исходящих из одного или нескольких источников, с каждым из которых связаны датчики. Источники и датчики расположены таким образом, чтобы получать рентгенографические проекции в плоскости, ортогональной к направлению перемещения трубы. Следовательно, рентгенографические проекции являются компланарными в плоскости проекции, которая является ортогональной к оси симметрии трубы. Направление этих рентгенографических проекций образует прямой угол (90°) по отношению к направлению перемещения. Этот метод не позволяет полностью распознавать внутреннюю и наружную поверхности трубы. Способ, описанный в этой патентной заявке, позволяет измерять только совокупную толщину двух стенок трубы в направлении проекции, без реконструкции трехмерной модели трубы, которая позволила бы произвести точные измерения в других направлениях.
Точно так же, в патенте US 5 864 600 описан способ определения уровня заполнения сосуда при помощи источника рентгеновских лучей и датчика, расположенных поперечно с двух сторон от конвейера, транспортирующего сосуды. Эта система не позволяет производить измерения для поверхности, ориентированной не поперечно, так как в этом документе не предусмотрено трехмерное моделирование сосудов.
В патентной заявке US 2009/0262891 описана рентгеновская система обнаружения объектов, находящихся в багаже, поступательно перемещающемся по конвейеру. Эта система содержит импульсные генерирующие трубки или датчик, имеющий большой размер параллельно направлению перемещения. В этом документе предусмотрен метод реконструкции объекта, который не является удовлетворительным, так как отсутствие проекций в направлении перемещения не позволяет измерять размеры в направлении, ортогональном к направлению перемещения. Отсутствие рентгенографических проекций в угловом секторе не позволяет реализовать цифровую модель, которая должна обеспечивать точные измерения.
В патентной заявке DE 197 56 697 описано устройство, имеющее те же недостатки, что и система в патентной заявке US 2009/0262891.
В патентной заявке WO 2010/092368 описано устройство визуализации поступательно перемещающегося объекта при помощи рентгеновских лучей с использованием источника излучения и трех линейных датчиков.
В патентной заявке US 2010/220910 описан метод обнаружения аномалий объекта с использованием контрольной трехмерной модели, отображающей идеальный объект. Затем в рамках способа сравнивают снятое двухмерное изображение реального объекта с двухмерным изображением, соответствующим контрольной модели, чтобы выявить аномалию. Этот метод не позволяет производить точные измерения объекта и позволяет контролировать объект только в получаемых двухмерных изображениях, то есть только в направлениях, ортогональных к направлениям проекции.
В документе WO2018014138 описан метод проверки произведенного изделия. Согласно предложенному способу, снимают последовательность рентгенографических изображений изделия; определяют трехмерное положение огибающей изделия для каждого из снятых рентгенографических изображений; и осуществляют цикл коррекции трехмерной модели, детализированной в виде сети звеньев, который итеративно содержит: создание моделированного рентгенографического изображения для каждого определенного положения изделия; и сравнивают моделированные рентгенографические изображения и снятые рентгенографические изображения и определяют результат соответствия. Если результат сравнения свидетельствует о несоответствии, способ содержит идентификацию различий между моделированными рентгенографическими изображениями и снятыми рентгенографическими изображениями и определение их причины с точки зрения плотности материала или трехмерной геометрии; корректируют либо геометрию, либо плотность материала в интересующей области детализированной трехмерной модели изделия на основе каждого из идентифицированных и характеризованных различий и производят новую итерацию. Этот документ отталкивается, таким образом, от цикла коррекции трехмерной модели, то есть применяет трехмерные геометрические формы, что требует больших вычислений. Кроме того, в этом документе указано, что для обеспечения этого цикла коррекции трехмерной модели необходимо не менее 25 рентгенографических изображений и предпочтительно около 100 рентгенографических изображений, образующих непрерывную последовательность изображений, при этом каждое изображение дает единственный угол обзора изделия.
В публикации J.P.Kruth et al. “Computed tomography for dimensional metrology”, CIRP Annals, том 60, номер 2, 31 декабря 2011 года, стр. 821-842, ISSN: 0007-8506, DOI:10.1016/J.CIRP.2011.05.0 представлена панорама технологии рентгеновской томографии, применяемой для размерной метрологии. В частности, согласно этому документу, базовый принцип этой технологии предполагает, что математическая реконструкция проецируемых изображений приводит к воксельной 3D-модели и предполагает пост-обработку данных вокселя для обнаружения краев детали (сегментация) и для размерного измерения. В этом документе указано также, что базовый принцип этой технологии требует вращения объекта вокруг его оси.
В документе US 2009/262891 описана система, которая не производит геометрических реконструкций, а является стандартной системой визуализации, что требует значительной угловой дискретизации и, следовательно, многочисленных компонентов в виде унитарных датчиков в направлении траектории объекта. Следовательно, это требует применения плоских детекторов с высокой плотностью «фотоэлементов» вдоль линий, ориентированных в направлении траектории объекта. Иначе говоря, система трехмерной реконструкции при помощи алгоритмов фильтрованной обратной проекции является чрезвычайно требовательной с точки зрения общего количества унитарных датчиков, поскольку необходимо наличие многочисленных унитарных датчиков в направлении траектории объекта.
Изобретение призвано преодолеть недостатки известных решений и предложить способ, недорогой в осуществлении и позволяющий производить точный размерный рентгенографический контроль изготовленных объектов, поступательно перемещающихся на высокой скорости. В частности, способ должен обеспечивать такой контроль с небольшими вычислительными объемами, позволяя достигать этих высоких скоростей при помощи сравнительно недорогого оборудования.
В области томографии известно, что отсутствие рентгенографических проекций вокруг данного направления препятствует реконструкции поверхностей, параллельных относительно этого направления, создавая феномен «отсутствующей границы», что препятствует при размерном контроле измерению размеров, ортогональных к недостающим рентгенографическим проекциям.
Изобретение призвано также предложить способ, позволяющий производить точные измерения на поступательно перемещающихся объектах, возможно, с построением точной и полной трехмерной цифровой модели, тогда как рентгенографические проекции присутствуют в ограниченном количестве и не могут быть сняты вокруг направления транспортировки объектов.
Раскрытие изобретения
Объектом изобретения является способ автоматического измерения линейных размеров изготовленных объектов серии, содержащий этапы, на которых:
- выбирают серию изготовленных объектов, в которой каждый из указанных объектов состоит из одной или нескольких отдельных частей, при этом число частей известно, и каждая часть выполнена из материала с известным коэффициентом ослабления, одинаковым в любой точке части объекта;
- транспортируют, при помощи устройства транспортировки, объекты в направлении перемещения вдоль прямолинейной траектории в плоскости транспортировки, причем эти объекты образуют объем транспортировки во время своего перемещения;
- размещают за пределами объема транспортировки
- по меньшей мере один источник рентгеновской трубки, при этом каждый источник расположен на одной и той же базовой прямой, параллельной направлению перемещения вдоль прямолинейной траектории, и
- один или несколько датчиков изображений, подвергающихся действию и чувствительных к рентгеновским лучам, выходящим из соответствующего источника, причем рентгеновские лучи проходят по меньшей мере через проверяемую область, производя на каждом датчике изображений рентгенографическую проекцию проверяемой области в направлении проекции;
- получают, при помощи датчика или датчиков изображений (Ci, Cik) для каждого объекта во время его перемещения, набор одномерных рентгенографических изображений обработки, при этом каждое одномерное рентгенографическое изображение обработки содержит проекцию сечения объекта в плоскости (Pk) сечения, содержащей базовую прямую, при этом набор включает в себя
- указанные одномерные рентгенографические изображения обработки для числа (NK) отдельных плоскостей (Pk) сечения, содержащих базовую прямую;
- для каждой отдельной плоскости (Pk) сечения число (NP) указанных одномерных рентгенографических изображений (Spk) обработки проверяемой области, полученных по меньшей мере в трех разных направлениях (Dijk) проекции в плоскости сечения;
- для каждого измеряемого объекта и для каждой отдельной плоскости (Pk) сечения определяют, при помощи компьютерной системы, оконтуривание объекта в рассматриваемой плоскости (Pk) сечения на основании указанных одномерных рентгенографических изображений (Spk) обработки проверяемой области, полученных по меньшей мере в трех разных направлениях (Dijk) проекции в плоскости сечения,
- и для каждого измеряемого объекта определяют, на основании оконтуриваний объекта в каждой отдельной плоскости сечения, по меньшей мере одно измерение линейного размера проверяемой области измеряемого объекта.
Другие отличительные признаки заявленного способа, которые являются факультативными, но которые можно комбинировать между собой, раскрыты в нижеследующих абзацах.
Оконтуривание объекта может содержать или может быть образовано кривой или набором кривых, которые отображают пересечение граничных поверхностей объекта с плоскостью сечения.
Кривая или каждая кривая оконтуривания объекта может быть плоской кривой, моделированной при помощи параметрической системы.
Определение оконтуривания объекта в плоскости сечения может содержать алгоритм коррекции кривой, основанный на априорном оконтуривании объекта в плоскости сечения.
Определение оконтуривания объекта в плоскости сечения может содержать алгоритм коррекции кривой типа нелинейной регрессии.
Определение оконтуривания объекта в плоскости сечения может содержать итеративный алгоритм коррекции кривой, включающий в себя
- учет априорного оконтуривания объекта в плоскости сечения в качестве вычисленного оконтуривания первого ранга итерации;
- затем итеративно
- на основании вычисленного оконтуривания данного ранга итерации объекта в плоскости сечения вычисление числа, по меньшей мере равного трем моделированным одномерным рентгенографическим изображениям проверяемой области, вычисленным в плоскости сечения по меньшей мере в трех разных направлениях проекции, которые использовались для съемки одномерных рентгенографических изображений обработки в плоскости сечения,
- сравнение моделированных одномерных рентгенографических изображений с одномерными рентгенографическими изображениями обработки,
- в зависимости от сравнения, - преобразование вычисленного оконтуривания в вычисленное оконтуривание более высокого ранга итерации,
пока сравнение моделированных одномерных рентгенографических изображений с одномерными рентгенографическими изображениями обработки не достигнет заранее определенного критерия оптимизации.
Способ может содержать этапы, на которых:
- получают, при помощи датчиков изображений для каждого объекта во время его перемещения, число, по меньшей мере равного трем, двухмерных рентгенографических изображений проверяемой области, полученным каждое, в разном направлении проекции,
- извлекают из двухмерных рентгенографических изображениях одномерные рентгенографические изображения обработки для формирования набора одномерных рентгенографических изображений.
Одномерное рентгенографическое изображение обработки объекта может быть получено посредством дискретизации точечного изображения, снятого при помощи точечного датчика изображений, в течение времени сканирования, соответствующего времени перемещения объекта между источником и точечным датчиком изображений, в ходе его перемещения.
Способ может содержать этап, на котором для каждого измеряемого объекта строят, при помощи компьютерной системы и на основании оконтуриваний объекта в каждой из отдельных плоскостей сечения, цифровую трехмерную геометрическую модель проверяемой области, содержащую:
- трехмерные точки пространства, принадлежащие, каждая, к граничной поверхности проверяемой области объекта;
- и/или по меньшей мере одну трехмерную поверхность проверяемой области.
Определение для каждого измеряемого объекта, на основании оконтуриваний объекта в каждой отдельной плоскости сечения, по меньшей мере одного измерения линейного размера проверяемой области измеряемого объекта может включать в себя определение расстояния между по меньшей мере двумя трехмерными точками цифровой трехмерной геометрической модели проверяемой области.
Способ может содержать этап, на котором вводят в компьютерную систему для каждой плоскости сечения априорное оконтуривание объекта в плоскости сечения.
Априорные оконтуривания могут быть получены:
- при помощи цифровой модели компьютерного проектирования объектов серии;
- и/или на основании измерения одного или нескольких объектов одной серии при помощи измерительного устройства;
- и/или на основании вводимых значений, и/или выполненных чертежей, и/или форм, выбранных оператором, на интерфейсе «человек-машина» компьютерной системы.
Способ может содержать этап, на котором вводят в компьютерную систему априорную трехмерную геометрическую модель проверяемой области серии, которую можно получить при помощи:
- цифровой модели компьютерного проектирования объектов серии;
- и/или цифровой геометрической модели, полученной на основании измерения одного или нескольких объектов одной серии при помощи измерительного устройства;
- и/или цифровой геометрической модели, созданной компьютерной системой на основании вводимых значений, и/или выполненных чертежей, и/или форм, выбранных оператором на интерфейсе «человек-машина» компьютерной системы.
Способ может содержать этап, на котором размещают источник или источники в плоскости транспортировки.
Способ может содержать этап, на котором получают, при помощи датчика или датчиков изображений для объекта серии во время его перемещения и для каждой рассматриваемой плоскости сечения объекта, по меньшей мере два одномерных рентгенографических изображения обработки проверяемой области, соответствующих направлениям проекции, образующим в рассматриваемой плоскости сечения полезный угол, превышающий или равный 45° и меньший или равный 90°, предпочтительно превышающий или равный 60° и меньший или равный 90°.
Способ может содержать этап, на котором получают, при помощи датчика или датчиков изображений для объекта серии во время его перемещения и для каждой рассматриваемой плоскости сечения объекта, по меньшей мере одно рентгенографическое изображение проверяемой области, соответствующее направлению проекции, имеющему при приведении в проекции в плоскость транспортировки угол раскрытия с направлением перемещения, составляющий от 10° до 60°.
Способ может содержать этап, на котором не получают, при помощи датчика или датчиков изображений для каждого объекта серии во время его перемещения, ни одного рентгенографического изображения проверяемой области, соответствующего направлению проекции, имеющему угол раскрытия с направлением перемещения, меньший 10°.
Способ может содержать этап, на котором выполняют и получают рентгенографические проекции проверяемой области объекта так, чтобы рентгеновские лучи, исходящие из источника или источников и достигающие датчиков изображений, не проходили через другой объект.
Способ может содержать для каждого объекта серии во время его перемещения и для каждой плоскости сечения этап, на котором получают одномерные рентгенографические изображения обработки, полученные из от трех до сорока рентгенографических проекций проверяемой области с разными направлениями проекции, предпочтительно полученных из от четырех до пятнадцати рентгенографических проекций проверяемой области с разными направлениями проекции.
В некоторых вариантах выполнения датчики изображений могут быть частью по меньшей мере трех физических детекторных компонентов, каждый из который является компонентом линейного типа и содержит линейную сеть элементов, чувствительных к рентгеновским лучам и распределенных вдоль опорной прямой, которая образует вместе с источником плоскость проекции, содержащую направление проекции, причем эти датчики изображений расположены так, что:
- по меньшей мере m чувствительных элементов каждого из этих физических детекторных компонентов принимают рентгенографическую проекцию проверяемой области при помощи исходящих из источника рентгеновских лучей;
- плоскости проекции для разных физических детекторных компонентов различаются между собой и не являются параллельными относительно плоскости транспортировки;
- при помощи каждого из указанных по меньшей мере трех линейных физических детекторных компонентов при каждом инкрементальном перемещении каждого объекта вдоль траектории снимают одномерные рентгенографические изображения проверяемой области в количестве, выбранном так, чтобы для каждого объекта вся проверяемая область была полностью отображена в наборе одномерных рентгенографических изображений;
- для каждого объекта анализируют указанные по меньшей мере три набора одномерных рентгенографических изображений проверяемой области.
Объектом изобретения является также установка для автоматического измерения линейных размеров по меньшей мере одной проверяемой области изготовленных объектов серии, при этом установка содержит:
- устройство транспортировки объектов в направлении, материально представленном вектором перемещения, вдоль прямолинейной траектории в плоскости транспортировки, при этом объекты проходят через объем транспортировки, расположенный в направлении перемещения;
- по меньшей мере один источник рентгеновской трубки, который находится за пределами проходимого объема и создает направленный расходящийся пучок рентгеновских лучей для прохождения по меньшей мере через одну проверяемую область объекта, при этом каждый источник расположен на одной и той же базовой прямой, параллельной относительно направления перемещения, вдоль прямолинейной траектории;
- датчики изображений, находящиеся за пределами объема транспортировки, чтобы принимать рентгеновские лучи, выходящие из соответствующего источника, при этом источник или источники и датчики изображений расположены таким образом, чтобы каждый датчик изображений принимал рентгенографическую проекцию проверяемой области при помощи лучей, выходящих из источника, когда объект пересекает лучи, при этом направления проекции этих рентгенографических проекций отличаются друг от друга;
- систему считывания, соединенную с датчиками изображений таким образом, чтобы для каждого объекта во время его перемещения считывать набор одномерных рентгенографических изображений обработки, при этом набор содержит:
- одномерные рентгенографические изображения обработки для числа отдельных плоскостей сечений, содержащих базовую прямую;
- для каждой отдельной плоскости сечения число одномерных рентгенографических изображений обработки проверяемой области, полученных по меньшей мере в трех разных направлениях проекции в плоскости сечения;
- компьютерную систему, выполненную таким образом, чтобы:
- для каждой отдельной плоскости сечения определять оконтуривание объекта в рассматриваемой плоскости сечения на основании указанных по меньшей мере трех одномерных рентгенографических изображений обработки.
Другие отличительные признаки заявленной установки, которые являются факультативными, но могут быть комбинированы между собой, представлены в нижеследующих параграфах.
Установка может содержать по меньшей мере два источника рентгеновских лучей, расположенные раздельно в двух разных положениях на одной и той же базовой прямой, параллельной направлению перемещения вдоль прямолинейной траектории, и по меньшей мере три датчика изображений, чувствительные к рентгеновским лучам и расположенные таким образом, что:
- каждый источник излучает свой пучок по меньшей мере через одну проверяемую область, чтобы достигать по меньшей мере одного соответствующего датчика;
- каждый датчик связан с источником и принимает выходящие из указанного источника рентгеновские лучи после их прохождения через проверяемую область.
Установка может содержать по меньшей мере один источник, из которого выходит расходящийся пучок рентгеновских лучей с апертурой, превышающей или равной 90°, или по меньшей мере два отдельных источника, из которых выходят расходящиеся пучки рентгеновских лучей, сумма апертур которых превышает или равна 90°.
Установка может содержать по меньшей мере один источник, расположенный в плоскости транспортировки.
По меньшей мере один источник и два датчика изображений могут быть расположены так, чтобы направления получаемой ими проекции проверяемой области имели между собой полезный угол, превышающий или равный 45° и меньший или равный 90°, предпочтительно превышающий или равный 60° и меньший или равный 90°.
По меньшей мере один источник и датчик изображений могут быть расположены так, чтобы, когда объект пересекает поле датчиков, направление проекции проверяемой области на датчик изображений образовало угол раскрытия с направлением перемещения, составляющий от 10° до 60°.
Поскольку ни один источник трубки рентгеновских лучей не находится в пересекаемом объеме и ни один датчик изображений не находится в объеме транспортировки, направление проекции проверяемой области на датчик изображений никогда не образует угол раскрытия с направлением перемещения, меньший 10°.
Датчики изображений и источники расположены таким образом, чтобы рентгеновские лучи, исходящие из источника или источников и достигающие датчиков изображений и проходящие через область объекта, не проходили одновременно через другой объект.
Установка может содержать от одного до четырех источников, принадлежащих к одной или нескольким рентгеновским трубкам.
Число и расположение датчиков изображений и соответствующих источников определены таким образом, чтобы для каждого объекта серии во время его перемещения рентгенографические проекции проверяемой области на датчики изображений имели от трех до сорока разных направлений проекции, предпочтительно от четырех до пятнадцати разных направлений проекции.
Датчики изображений могут быть частью физических детекторных компонентов линейного типа, каждый из которых содержит линейную сеть элементов, чувствительных к рентгеновским лучам и распределенных вдоль опорной прямой, которая образует с соответствующим источником плоскость проекции, содержащую направление проекции, причем эти датчики изображений расположены таким образом, что:
- по меньшей мере m чувствительных элементов каждого из этих физических детекторных компонентов принимают рентгенографическую проекцию проверяемой области при помощи пучка рентгеновских лучей, выходящего из соответствующего источника;
- плоскости проекции для разных датчиков различаются между собой и не являются параллельными относительно плоскости транспортировки.
В некоторых вариантах выполнения по меньшей мере три линейных датчика изображений имеют свои параллельные между собой опорные прямые.
В некоторых вариантах выполнения по меньшей мере три линейных физических детекторных компонента имеют свои опорные прямые, ортогональные к плоскости транспортировки.
Краткое описание чертежей
Фиг. 1 - схематичный вид сверху установки, позволяющей измерять при помощи рентгеновских лучей размеры на линейно перемещающихся объектах.
Фиг. 2 - схематичный вид в перспективе сбоку части установки, позволяющей измерять при помощи рентгеновских лучей размеры на объекте.
Фиг. 3 - более общий схематичный вид в перспективе установки, типа установок, показанных на фиг. 1 и 2.
Фиг. 4 - схематичный вид в перспективе, иллюстрирующий объем, проходимый или образуемый объектами во время их линейного перемещения.
Фиг. 5 - схематичный вид сверху примера выполнения заявленной установки, содержащей два источника рентгеновских лучей.
Фиг. 6 - схематичный вид спереди и в поперечном направлении установки, показанной на фиг. 5.
Фиг. 7 - схематичный вид, иллюстрирующий определение полезного угла между двумя направлениями проекции.
Фиг. 8 - схематичный вид, иллюстрирующий определение полезного угла между двумя направлениями проекции.
Фиг. 9 - схематичный вид в перспективе другого примера позиционирования датчиков изображений по отношению к перемещению проверяемых объектов.
Фиг. 10 - схематичный вид другого примера выполнения заявленной установки с применением матричных датчиков изображений.
Фиг. 11 - вид матрицы элементов, чувствительных к рентгеновским лучам, где показаны две отдельные зоны, соответствующие двум матричным датчикам изображений.
Фиг. 12 - блок-схема метода определения оконтуривания в плоскости сечения.
Фиг. 13 - блок-схема заявленного способа.
Осуществление изобретения
Предварительно приведем несколько определений терминов, используемых в рамках изобретения.
Источник Fj рентгеновской трубки является точечным источником рентгеновских лучей, предпочтительно «микро-источником», например, с диаметром от 0,01 мм до 1 мм, создающим расходящийся пучок рентгеновских лучей. Можно использовать любой тип точечного или почти точечного источника рентгеновских лучей.
Чувствительный элемент датчика изображений для рентгеновских лучей является элементом, чувствительным к рентгеновским лучам, иначе говоря, представляет собой элементарную поверхность, например, размером 0,2 × 0,2 мм или 0,02 × 0,02 мм, и преобразует принимаемые им рентгеновские лучи в электрический сигнал. Как правило, чувствительный элемент датчика изображений для рентгеновских лучей содержит сцинтиллятор, который преобразует рентгеновские лучи в видимый свет, затем фотоэлектрический датчик преобразует видимый свет в электрический сигнал. Существуют также технологии прямого преобразования рентгеновских лучей в электрический сигнал. Пиксель обозначает элементарное значение точки дискретизированного изображения, характеризующейся, например, своим уровнем серого между 0 и максимальным значением. Например, для цифрового изображения в 12 бит пиксель принимает цифровые значения от 0 до 4 095.
Система считывания рентгенографических изображений содержит одну или несколько поверхностей, чувствительных к рентгеновским лучам, то есть поверхностей, содержащих один или несколько чувствительных элементов, преобразующих рентгеновские лучи в электрический сигнал для его передачи в систему анализа, классически применяемую компьютером и называемую в дальнейшем компьютерной системой SI. Сигналы, поступающие от всех чувствительных элементов, принадлежащих к одной зоне чувствительной поверхности, считываемые устройством считывания и передаваемые вместе в компьютерную систему, образуют рентгенографическое изображение. С целью анализа компьютерной системой рентгенографические изображения предпочтительно преобразуются в цифровые рентгенографические изображения либо как можно ближе к чувствительной поверхности, например, в электронной схеме, встроенной в физический детекторный компонент, либо на расстоянии, например, как можно ближе к компьютерной системе SI, и даже самой компьютерной системой SI.
Компьютерная система SI, пример которой схематично показан на фиг. 3, может быть выполнена в виде по меньшей мере одного стандартного компьютера, то есть компьютера, содержащего по меньшей мере один микропроцессор, один или несколько электронных блоков памяти и один или несколько интерфейсов визуализации (экран, проектор, голографический дисплей…), ввода (клавиатура, мышь, тачпад, сенсорный экран, …) и/или связи (USB, Ethernet®, Wi-Fi®, Bluetooth®, Zigbee®, …). Компьютерная система может содержать компьютерную сеть, используя данные с одним или несколькими другими компьютерами сети или с другими сетями, например, через протокол Интернет или Ethernet®. Кроме своего непосредственного соединения с датчиками изображений, компьютерная система может быть связана с датчиками, передающими данные о состоянии установки и/или с приводными устройствами установки (конвейеры, эжекторы, …). Предпочтительно компьютерная система может быть соединена с рентгеновской(ими) трубкой(ами) для получения от них рабочих данных и/или для обеспечения их контроля. Компьютерная система применяет одно или несколько программных средств, записанных и/или исполняемых локально или дистанционно, в том числе на одном или нескольких удаленных компьютерных серверах. Это программное средство или эти программные средства предпочтительно содержат одну или несколько программ для осуществления заявленного способа.
Пучки рентгеновских лучей, выходящие из источника Fj, проходят по меньшей мере через одну проверяемую область и формируют на чувствительной поверхности рентгенографическую проекцию проверяемой области, которую иногда называют светящимся изображением и которая содержит информацию ослабления рентгеновских лучей проходимым материалом.
Датчиком Ci, Cik изображений называют зону поверхности, чувствительной к рентгеновским лучам, которая принимает рентгенографическую проекцию проверяемой области. Датчик Ci, Cik изображений подвергается действию рентгеновских лучей, исходящих из соответствующего источника Fj. Датчик изображений преобразует эту рентгенографическую проекцию в рентгенографическое изображение проверяемой области.
Если зона чувствительной поверхности, соответствующая датчику Ci изображений, содержит только одну линию фоточувствительных элементов, распределенных на сегменте опорной прямой, рентгенографическое изображение, снятое за время интеграции (называемое также временем съемки) датчика, является линейным, то есть одномерным, состоящим из линии пикселей, образующих таблицу значений с одним размером. В этом случае датчик Cik изображений называют линейным датчиком. Таким образом, зона чувствительной поверхности, содержащая только одну линию чувствительных элементов, которая образует линейный датчик изображений, содержит линейную сеть чувствительных элементов, распределенных по сегменту опорной прямой. Согласно этому определению, столбец, или строка, или любой набор расположенных в линию (в том числе по диагонали или по другой наклонной линии) чувствительных элементов, принадлежащий к матричной чувствительной поверхности, считается линейным датчиком изображений. Следовательно, несколько зон одной чувствительной поверхности, содержащих, каждая, одну линию чувствительных элементов, при этом линии разных зон отличаются друг от друга, образуют несколько линейных датчиков изображений.
Если зона чувствительной поверхности, соответствующая датчику Ci изображений, содержит двухмерную матрицу фоточувствительных элементов, рентгенографическое изображение, снятое за время интеграции датчика, является матричным, то есть двухмерным, и состоит из матрицы пикселей, образующих таблицу значений с двумя размерами. В этом случае датчик Ci изображений называют двухмерным датчиком или матричным датчиком.
Если зона чувствительной поверхности, соответствующая датчику Cik изображений, содержит только один фоточувствительный элемент, рентгенографическое изображение, снятое за время интеграции датчика, называется точечным и состоит из пикселя, имеющего единственное значение. В этом случае датчик Cik изображений называют точечным датчиком.
В рамках настоящего изобретения датчик Ci, Cik изображений может соответствовать физическому детекторному компоненту CC1, CC2, …, CCnmax, части физического детекторного компонента CC1, CC2, …, CCnmax или соединению из нескольких физических детекторных компонентов или частей физических детекторных компонентов. Физический детекторный компонент является компонентом, содержащим один или несколько чувствительных элементов, неподвижно соединенных между собой, если их имеется несколько, и содержащим для всех своих чувствительных элементов общий интерфейс соединения с компьютерной системой. Общий интерфейс соединения может быть аналоговым или цифровым. Как правило, общий интерфейс соединения является частью встроенной электронной схемы физического детекторного компонента. В физическом детекторном компоненте CC1, CC2, …, CCnmax, содержащем несколько чувствительных элементов Cik, чувствительные элементы расположены по линии или на неподвижной не меняющейся поверхности, которая, как правило, является плоской, хотя иногда может быть и изогнутой. Если физический детекторный элемент CC1, CC2, …, CCnmax содержит линию фоточувствительных элементов, его называют линейным. Если физический детекторный элемент содержит двухмерную матрицу фоточувствительных элементов, его называют двухмерным или матричным. Если физический детекторный элемент содержит единственный фоточувствительный элемент, его называют точечным.
Таким образом, понятно, что в рамках настоящего изобретения датчик Ci, Cik изображений является блоком из одного или нескольких чувствительных элементов Cik, преобразующих рентгеновские лучи в электрический сигнал, при этом чувствительные элементы являются физическими элементами. Этот блок физических чувствительных элементов может соответствовать или не соответствовать физическому детекторному компоненту CC1, CC2, …, CCnmax.
В рамках изобретения можно различать рентгенографические изображения, снятые физическим детекторным компонентом CC1, CC2, …, CCnmax, и рентгенографические изображения обработки, используемые компьютерной системой для вычисления оконтуриваний, которые могут соответствовать рентгенографическому изображению, снятому физическим детекторным компонентом, части рентгенографического изображения, снятого физическим детекторным компонентом, или набору из нескольких изображений или частей рентгенографических изображений, снятых одним или несколькими физическими детекторными компонентами. В частности, одномерное рентгенографическое изображение обработки объекта может быть получено посредством дискретизации точечного изображения, снятого при помощи данного единственного чувствительного элемента Cik в течение времени сканирования, соответствующего времени перемещения объекта между источником и чувствительным элементом в ходе его перемещения. Этот чувствительный элемент Cik может соответствовать точечному физическому детекторному компоненту или может принадлежать к линейному физическому детекторному компоненту или к двухмерному или матричному физическому детекторному компоненту. Точно так же, двухмерное рентгенографическое изображение обработки объекта может быть получено посредством дискретизации линейного изображения, снятого при помощи линейного датчика Cik изображений в течение времени сканирования, соответствующего времени перемещения объекта между источником и линейным датчиком в ходе его перемещения. Этот линейный датчик Cik изображений может соответствовать линейному физическому детекторному компоненту или может принадлежать к двухмерному или матричному физическому детекторному компоненту. Изображение, полученное при дискретизации, соответствует расположенным рядом друг с другом нескольким изображениям, снятым последовательно в течение времени. Для рентгенографического изображения направление Dji, Djik проекции является ориентированным направлением или вектором, исходящим из источника Fj и проходящим через центр датчика Ci, Cik изображений, применяемого для съемки изображения, то есть через центр зоны, чувствительной к рентгеновским лучам, которая принимает рентгенографическую проекцию проверяемой области в момент съемки во время перемещения объекта между источником и датчиком изображений. Для пары датчик изображений-соответствующий источник направление проекции является вектором, исходящим из источника и достигающим середины датчика изображений. Позиционирование датчиков изображений осуществляют таким образом, чтобы чувствительная поверхность не была параллельной относительно направления проекции. В некоторых случаях предпочтительно, чтобы чувствительная поверхность датчика изображений была ортогональной к направлению проекции, определенному с соответствующим источником. Однако это не является обязательным условием, например, если чувствительная поверхность одного физического детекторного компонента содержит несколько чувствительных зон, каждая из которых образует датчик изображений и которые взаимодействуют при каждой съемке изображения, причем каждая с разным источником, то есть с разными направлениями проекции.
Для одномерного рентгенографического изображения обработки объекта, которое может быть получено посредством дискретизации точечного изображения, снятого при помощи чувствительного элемента Cik в течение времени сканирования, соответствующего времени перемещения объекта между источником и чувствительным элементом в ходе его перемещения, направление Djik проекции соответствует ориентированному направлению, исходящему из источника Fj и проходящему через центр применяемого чувствительного элемента.
Для одномерного рентгенографического изображения обработки объекта, снятого при помощи линейного датчика Cik изображений в течение единого времени интеграции датчика, направление проекции соответствует ориентированному направлению, исходящему из источника Fj и проходящему через центр применяемого линейного датчика Cik изображений. Таким образом, направление Djik проекции, соответствующее полученному линейному рентгенографическому изображению обработки, является направлением, исходящим из источника и проходящим через середину сегмента опорной прямой линейного датчика Cik изображений в момент съемки изображения, соответствующий времени интеграции этого линейного датчика Cik изображений.
Для двухмерного рентгенографического изображения обработки объекта, полученного посредством дискретизации линейного изображения, при этом линейное изображение снято при помощи линейного датчика CCi изображений в течение времени сканирования, соответствующего времени перемещения объекта между источником и чувствительным элементом в ходе его перемещения, направление Dji проекции соответствует ориентированному направлению, исходящему из источника Fj и проходящему через центр применяемого линейного датчика изображений.
Для двухмерного рентгенографического изображения обработки объекта, снятого при помощи двухмерного датчика Ci, CCi изображений в течение единого времени интеграции датчика, направление Dji проекции соответствует ориентированному направлению, исходящему из источника Fj и проходящему через центр применяемого двухмерного датчика изображений.
Направления Dji, Djik рентгенографических проекций считаются разными, если взятые попарно направления Dji, Djik проекции образуют между собой минимальный угол, по меньшей мере равный 3 градусам угла, предпочтительно по меньшей мере равный 5 градусам угла.
Зона чувствительной поверхности, которая содержит матрицу чувствительных элементов, образует матричный иди двухмерный датчик изображений, который содержит матричную сеть элементов, чувствительных к рентгеновским лучам, распределенных в виде матрицы. Как показано на фиг. 10, согласно этому определению, матричная зона С1, С1’ чувствительной поверхности, которая принадлежит к большей чувствительной поверхности Ss, тоже является матричным датчиком изображений. В этом примере на фиг. 10 чувствительная поверхность Ss соответствует чувствительной поверхности матричного физического детекторного элемента СС1. В некоторых случаях устройство съемки может раздельно обрабатывать несколько матричных зон С1, С1’ одной и той же чувствительной поверхности. Во всех случаях они образуют несколько матричных датчиков изображений, дающих разные матричные рентгенографические изображения, соответственно М1, М1’ (фиг. 12). Направление D11, D11’ проекции, соответствующее матричному рентгенографическому изображению соответственно M1, M1’, является направлением, исходящим из источника F1 и проходящим через середину матричной зоны С1, С1’ чувствительной поверхности в момент съемки изображения. Следовательно, датчики С1, С1’ изображений могут представлять собой не разделенные зоны, возможно, активируемые последовательно во времени.
Разумеется, специалист в данной области может использовать технологию матричного физического детекторного компонента, основанного на усилителе яркости или на «камере с повторением экрана», в которой пластина сцинтиллятора принимает светящееся изображение, преобразует его в видимый свет, при этом видимое изображение сзади фотографируется камерой, чувствительной в области излучения сцинтиллятора, как правило, в видимой области, и, в случае необходимости, оснащенной объективом.
Изобретение применяется для серии изготовленных объектов, выполненных из одного или нескольких материалов, таких как объекты, полученные посредством механической обработки, формовки, выдувания, спекания, литья под давлением, экструзии, или наборы объектов, полученных при помощи этих способов, при этом каждый из указанных объектов состоит из одной или нескольких разных частей, при этом число частей известно, и каждая часть выполнена из материала, имеющего известный коэффициент μ ослабления, являющийся однородным, то есть имеющий одинаковое значение в любой точке рассматриваемой части проверяемой области объекта и предпочтительно постоянный во времени и идентичный для объектов серии.
В некоторых вариантах выполнения, например, в случае механических деталей, отлитых из стали или алюминия, стеклянных бутылок, пластиковой тары, речь может идти о так называемых объектах из одного материала. В этом случае коэффициент μ ослабления известен и является однородным, то есть имеет одинаковое значение в любой точке проверяемой области объекта. Однако изобретение можно также применять для объектов, выполненных из нескольких материалов. В некоторых случаях разные материалы имеют одинаковый коэффициент ослабления, поэтому подразделением объекта на части можно пренебречь, и объект можно рассматривать как объект из одного материала, если только коэффициент ослабления является однородным, то есть одинаковым на всей проверяемой области.
Вместе с тем, изобретение можно применять для измерения линейных размеров на объектах из разных материалов. Такой объект можно рассматривать как соединение однородных по составу объемов, при этом каждый однородный по составу объем рассматривают как часть объекта. Эти объемы или части объекта ограничены замкнутыми поверхностями. В рамках изобретения будет считаться, что число этих частей известно, по меньшей мере для проверяемой области объекта. Это число является исчисляемым для проверяемой области, предпочтительно небольшим, например, меньшим 50, предпочтительно меньшим 20 и еще предпочтительнее - меньшим 10, чтобы ограничить объем вычислений и сохранить сходимость в случае применения итеративного метода коррекции.
Предпочтительно топология этих частей объекта известна, а именно известны относительные расположения связности (наличие общих поверхностей, ситуации включения или исключения различных частей между собой, расположение рядом и относительные положения, и т.д.). Соответственно, можно считать, что проходящий через объект рентгеновский луч прошел через конечное число объемов, имеющих разные, но известные коэффициенты ослабления, следовательно, путь можно разложить на сегменты, при этом каждый сегмент соединяет две точки, принадлежащие к граничным поверхностям части объекта, проходя через область постоянного ослабления, даже если длина этих сегментов априори не известна. Ослабление каждого рентгеновского луча зависит только от длины проходимых последовательных сегментов и от ослабления для каждого сегмента. Следовательно, информация по каждой точке рентгенографического изображения напрямую связана с реальными размерами проверяемой области, структура которой известна. Кроме того, геометрию объекта, в частности, геометрию его различных частей можно описать компьютерным методом заранее (до измерения) посредством отображения всех замкнутых поверхностей, которые можно назвать граничными поверхностями объекта. Граничные поверхности объекта являются поверхностями раздела. Таким образом, можно иметь одну или несколько наружных граничных поверхностей объекта, каждая из которых является разделом между окружающим воздухом и материалом части объекта. Можно также иметь одну или несколько внутренних граничных поверхностей объекта, каждая из которых является разделом между двумя материалами двух расположенных рядом частей объекта. В случае полого объекта, содержащего внутреннюю полость, ограниченную внутренней поверхностью объекта, внутренняя поверхность является наружной граничной поверхностью объекта, так как она является границей раздела между материалом объекта и окружающим воздухом даже в случае замкнутой полости, в которой может быть заключен окружающий воздух.
Следует отметить, что коэффициент μ ослабления материала неукоснительно является спектральным свойством μ(λ) в соответствии с длиной волны λ или с энергией рентгеновских лучей. Эту характеристику не обязательно учитывать при измерении, когда источник рентгеновских лучей имеет свой собственный излучаемый спектр, и можно считать, что ослабление μ является характеристикой материала при спектре выбранного источника. Кроме того, специалист в данной области сможет осуществлять изобретение, используя любой метод учета спектрального ослабления или усиления пучков.
Разумеется, локальные и/или временные колебания коэффициента μ ослабления небольшой амплитуды не препятствуют осуществлению способа, но в зависимости от своей амплитуды могут стать причиной незначительных или чувствительных потерь точности в измерениях, производимых установкой. Таким образом, считается, что такие небольшие колебания, связанные, например, с вариациями состава объектов, с изменениями параметров процесса изготовления, с изменениями окружающих условий или с изменениями в работе источников рентгеновских лучей, возможны, считая при этом проверенными единство и постоянство ослабления материала в каждой части объекта. С другой стороны, изобретение нельзя применять для разнородных частей объекта, таких как конгломераты крупного гранулометрического размера, штукатурки с галькой, если разнородные зерна и ослабления являются более значительными, чем разрешение изображений. Изобретение нельзя применять для контроля объектов с неизвестными заранее формой и содержимым, таких как предметы багажа. По этой же причине изобретение нельзя применять для систем получения изображений в области медицины или биологии в целом, если только объекты не отвечают соответствующим критериям.
Ослабление воздуха можно считать ничтожным по сравнению с ослаблением материала или материалов. В этом случае ослабление пучка рентгеновских лучей, проходящего через объект, будет зависеть только, с одной стороны, от указанного однородного ослабления при излучаемом спектре рентгеновских лучей и, с другой стороны, от совокупной толщины проходимого материала. Альтернативно, считают, что толщина проходимого воздуха является большой и однородной для всех лучей, и, следовательно, ее можно считать известной. Ослабление, связанное с воздухом, можно вычесть из общего измеряемого ослабления. Так, например, можно считать, что уровень серого в каждом рентгенографическом изображении, возможно, скорректированный, зависит только и непосредственно от общей совокупной проходимой толщины материала. В этом случае можно точно определить граничные поверхности, которые представляют собой переходы между воздухом и материалом.
Таким образом, цифровой анализ рентгенографических изображений объекта позволяет определить относительное положение в пространстве определенного числа точек граничных поверхностей объекта.
В случае необходимости, цифровой анализ рентгенографических изображений каждого объекта позволяет построить цифровую трехмерную геометрическую модель каждого объекта, в дальнейшем называемую цифровой геометрической моделью. Эта цифровая геометрическая модель может быть простым наслоением двухмерных цифровых геометрических моделей. Реализация цифровой геометрической модели является способом, - с точки зрения математики, графики и структуры данных, - при помощи которого трехмерные объекты могут быть представлены и использованы в цифровом виде в памяти компьютерной системы. Следует заметить, что в некоторых вариантах осуществления изобретение позволяет определить столько же трехмерных цифровых геометрических моделей, сколько имеется облучаемых объектов, и что может иметься столько облучаемых объектов, сколько объектов перемещаются на системе транспортировки. Действительно, отличительным признаком изобретения является то, что, в случае необходимости, оно позволяет производить измерение на каждом из объектов, движущихся в установке, в том числе на высокой скорости.
Можно получить поверхностную модель непосредственно на основании рентгенографических изображений, то есть обходясь без вычисления объемной модели.
При поверхностном моделировании объект образован по меньшей мере одной трехмерной поверхностью, в частности, замкнутой ориентированной трехмерной поверхностью, соответствующей наружной граничной поверхности между материалом объекта и наружной окружающей средой (как правило, воздухом), что позволяет манипулировать понятиями внутреннего и наружного пространств объекта. Для таких поверхностей можно применять различные методы моделирования: имплицитные поверхности, параметрируемые поверхности (части плоскости, В-сплайн, NURBS, …), возможно ограничиваемые сетью кривых. Простым моделированием является разделение на треугольные ячейки, которые можно рассматривать как граничную поверхность объема, образованного тетраэдрами.
Сечение трехмерного объекта, то есть пересечение объекта с плоскостью сечения, позволяет определить оконтуривание объекта в плоскости сечения. Сечение трехмерных поверхностей объекта, то есть его граничных поверхностей, определяется одной или несколькими двухмерными кривыми в плоскости сечения, которые при совокупном рассмотрении образуют оконтуривание объекта в плоскости сечения. Знание двухмерных кривых в последовательности плоскостей разреза позволяет произвести реконструкцию трехмерных поверхностей с точностью, которая, разумеется, зависит от числа плоскостей сечения.
Чтобы оперировать измерениями линейных размеров, таких как длина, существует несколько подходов.
В рамках так называемого поверхностного метода можно вычислить сегмент, концами которого являются пересечения прямой с граничной поверхностью материал/воздух поверхностной модели. Наконец, смешанный метод состоит в преобразовании объемной модели в поверхностную модель, затем применяют второй метод.
Третий метод состоит в определении в плоскости разреза расстояния между двумя точками одной или двух двухмерных кривых, при этом любая кривая является границей между материалом и воздухом.
Трехмерная точка является точкой, координаты которой известны в трехмерном пространстве в любой системе координат.
Эти три предыдущих метода являются примерами определения расстояния между двумя трехмерными точками для определения измерения линейного размера.
Задачей изобретения является осуществление более полных измерений, чем измерения, достигаемые при помощи простых двухмерных рентгенографических изображений. Действительно, при помощи матричного датчика изображений можно легко получить двухмерное рентгенографическое изображение, соответствующее проекции проверяемой области, и измерить размеры в плоскости, ортогональной к направлению проекции и называемой «плоскостью проекции». Точно так же, при помощи линейного датчика изображений можно легко получить двухмерное рентгенографическое изображение, соответствующее проекции проверяемой области, полученной путем расположения рядом последовательных линий изображения, снимаемых во время перемещения в направлении перемещения, и измерить размеры в плоскости проекции, параллельной направлению перемещения. С другой стороны, согласно изобретению, можно измерять линейные размеры в направлениях, которые не содержатся в плоскостях проекции и не являются параллельными плоскостям проекции. Действительно, во время обработки комбинации рентгенографических изображений по меньшей мере в трех разных направлениях проекции способ может включать в себя реконструкцию и измерение размеров практически во всех направлениях. Это можно осуществлять при помощи любого метода, обеспечивающего определение трехмерных точек в пространстве, принадлежащих к граничной поверхности, включенной в проверяемую область объекта. Возможным методом является реконструкция трехмерной модели проверяемой области поверхностного или объемного типа или на основании плоскостей разреза. Действительно, на основании объемной трехмерной модели проверяемой области и предпочтительно на основании поверхностной трехмерной модели проверяемой области, возможно, определяя сечения трехмерной модели области, можно опосредованно определить по меньшей мере две трехмерные точки и даже предпочтительно облака трехмерных точек, распределенных в направлениях, не измеряемых на основании только двухмерных рентгенографических изображений.
Таким образом, цифровая геометрическая модель состоит из разных геометрических элементов, таких как точки, сегменты, кривые, поверхности, вычисляемые на основании рентгенографических проекций, рассматривая при вычислении каждого элемента ослабление по меньшей мере некоторых рентгеновских лучей, прошедших через эту точку на реальном объекте, чтобы цифровая геометрическая модель была точным отображением геометрии реального объекта, включая деформации по отношению к идеальному объекту. Иначе говоря, координаты геометрических элементов определяют, считая, что указанные координаты изменили рентгенографические проекции, даже когда эти геометрические элементы не различимы ни в одной из двухмерных рентгенографических проекций. Таким образом, измерения размеров на цифровой геометрической модели дают информацию о размерах каждого моделированного объекта на основании геометрических элементов, не различимых ни в одной из рентгенографических проекций.
Следовательно, преимуществом заявленного способа является то, что он позволяет определять для каждого объекта цифровую геометрическую модель, состоящую по меньшей мере из двух трехмерных точек, при этом каждая из этих точек принадлежит к граничной поверхности проверяемой области, даже если эти две точки не находятся ни в плоскости, ортогональной к направлению Dji, Djik проекции, ни в плоскости, параллельной направлению перемещения.
Разумеется, интерес метода состоит не только в получении измерений в направлениях за пределами плоскости, ортогональной к направлению Dji, Djik проекции, и за пределами плоскости, параллельной направлению перемещения, но также в получении большого числа измерений, распределенных в проверяемой области, то есть размеров в многочисленных направлениях между многочисленными парами точек. Предпочтительно цифровая геометрическая модель состоит из:
- по меньшей мере двух трехмерных точек пространства, каждая из которых принадлежит к граничной поверхности проверяемой области и которые не находятся в плоскости, ортогональной к направлению Dji, Djik проекции, и не находятся в плоскости, параллельной направлению Т перемещения;
- и/или по меньшей мере из одной трехмерной поверхности проверяемой области, содержащей точки, не принадлежащие к плоскости, ортогональной к направлению Dji, Djik проекции, и не принадлежащие к плоскости, параллельной направлению Т перемещения;
- и/или по меньшей мере из одного сечения проверяемой области по плоскости, отличной от плоскости, ортогональной к направлению Dji, Djik проекции, и отличной от плоскости, параллельной направлению перемещения.
Так называемая «априорная» геометрическая модель является цифровой геометрической моделью серии объектов, которая может служить в качестве инициализации для программы реконструкции, чтобы построить цифровую геометрическую модель объекта. Ее роль в основном состоит в предоставлении компьютерной системе данных о форме, геометрии и размерах объекта и/или различных частей объекта, моделируемого путем вычисления, причем эти данные являются вместе с тем недостаточно точными для обеспечения измерения объекта с точностью, требуемой от измерения.
Благодаря этим данным, становится, в частности, возможным:
- не моделировать, на основании рентгенографических изображений, ослабление в областях пространства изображений, априори не содержащих материала, так как ослабление в них считается нулевым;
и/или
- моделировать на основании рентгенографических изображений только поверхности, на которых необходимо произвести измерения;
и/или
- определять только расхождения между поверхностями, моделируемыми на основании рентгенографических изображений, и идеальными теоретическими поверхностями.
В случае объектов только из одного материала знание априорной геометрической модели позволяет также не определять на основании рентгенографических изображений значения ослабления в областях пространства изображения, содержащих материал в соответствии с априорной моделью, так как она известна как модель материала изготовления объекта.
Вместе с тем, необходимо понимать, что, согласно изобретению, ни одно измерение объекта не выводят из измерения на априорной геометрической модели, поскольку эта модель известна независимо от указанного объекта и отображает не реальный теоретический идеал.
Как следует из чертежей и, в частности, из фиг. 1 и 2, объектом изобретения является установка 1, позволяющая осуществлять способ автоматического осуществления измерений линейных размеров на изготовленных объектах 2, перемещающихся с высокой скоростью. Изобретение относится к так называемому «линейному» контролю серии изготовленных объектов, при этом предположительно объекты серии являются идентичными после этапа трансформации или изготовления, чтобы контролировать качество объектов или способа трансформации или изготовления. Объекты предполагаются идентичными, поскольку не было произведено никакого намеренного действия, чтобы они различались. Однако, хорошо известно, что в серии не все объекты являются идентичными с учетом непредвиденных случайностей во время трансформации или изготовления.
Способ работает при скорости перемещения потока объектов 2. В идеале, установка 1 может обрабатывать продукцию со скоростью производства, например, более 100 объектов в минуту, предпочтительно более 300 объектов в минуту и, например, со скоростью не менее 600 объектов в минуту.
Однако продолжительность вычисления может превысить интервал между двумя объектами. Точно так же, время экспонирования, называемое также временем интеграции датчиков изображений и считывания, может быть слишком длительным. Если самый быстрый поток не может быть обработан одной установкой в соответствии с изобретением, то параллельно можно применять несколько установок, каждая из которых контролирует часть продукции. Так, можно разделить проток продукции на две или три параллельных потока, контролируемых двумя или тремя заявленными установками. Естественно, экономический эффект изобретения повышается, если количество потока и, следовательно, число заявленных установок является небольшим.
Изобретение представляет собой значительное усовершенствование, благодаря измерению движущихся объектов, избегая спирального сканирования и сканирования на плите, которые не адаптированы к темпам производства, так как эти две возможности, предусматривающие относительное вращение объектов по отношению к источникам и/или к датчикам, создают «перерыв в движении» или слишком медленное движение объектов внутри установки.
Заявленный способ обеспечивает измерение, предпочтительно на каждом объекте 2, по меньшей мере одного и, как правило, нескольких линейных размеров, то есть длин. Действительно, линейный размер является длиной, измеряемой вдоль линии. Эта линия, вдоль которой измеряют линейный размер, может быть прямой линией или не прямой линией, например, любой кривой линией, круговой линией, ломаной линией, и т.д. Эта линия может быть плоской линией, содержащейся в одной плоскости, или трехмерной линией, которая не заключена в одной плоскости. Длина является измерением, выраженным в единицах длины, например, в дюймах или метрах. Линейный размер изготовленного объекта является, например, диаметром, толщиной, высотой, длиной, шириной, глубиной, расстоянием, координатой как расстоянием точки по отношению к началу координат, периметром изготовленного объекта. По меньшей мере одно линейное измерение проверяемой области является расстоянием между по меньшей мере двумя трехмерными точками, каждая из которых принадлежит к граничной поверхности, в частности, к наружной граничной поверхности проверяемой области, и которые находятся в одной плоскости, в том числе в плоскости, не ортогональной к направлению Dji, Djik проекции.
Согласно изобретению, объекты 2 предположительно являются идентичными, если не считать некоторых размерных колебаний, и образуют серию объектов. Иначе говоря, серия состоит из теоретически идентичных объектов, если они выполнены в соответствии с требованиями. Размерный контроль состоит в измерении реальных размеров и в их сравнении с требуемыми размерами. Априори, любой объект серии является близким к идеальному контрольному объекту, имеющему требуемые размеры, но отличается от него размерными колебаниями.
Согласно предпочтительному отличительному признаку изобретения, для проверки выбирают по меньшей мере одну область объекта 2, чтобы можно было произвести измерения размеров в этой области объекта, соответствующих размерной характеристике проверяемой области. По меньшей мере область объекта, в которой необходимо измерить линейный размер или линейные размеры, контролируют при помощи рентгеновских лучей. Таким образом, проверяемая область может соответствовать всему объекту или одной или нескольким областям этого объекта.
Как было указано выше, все объекты 2 серии состоят только из одной части или из нескольких разных частей, при этом каждая часть выполнена из материала, имеющего однородный коэффициент ослабления в любой точке рассматриваемой части объекта.
Согласно предпочтительному варианту изобретения, компьютерная система знает этот коэффициент для каждой части проверяемой области. Способ может предусматривать средство предоставления компьютерной системе значения коэффициента ослабления материала. Это значение может быть спектральным в смысле значения, являющегося свойством материала, которое определяет взаимодействие этого материала с излучением и зависит от длины волны излучения. Это значение может не быть спектральным, то есть не зависеть от длины волны излучения. Это значение можно сделать зависимым от регулировок источников рентгеновских лучей. Предоставление можно осуществлять при помощи различных устройств ввода, связи и памяти. Например, устройство предоставления компьютерной системе значения коэффициента ослабления материала является массовой памятью, проводной или беспроводной сетью или интерфейсом человек-машина.
Установка 1 содержит также устройство 5 транспортировки объектов 2 в плоскости РС транспортировки, то есть вдоль плоской траектории с направлением, представленным вектором Т перемещения. Предпочтительно траектория является прямолинейной в пределах, обычно допускаемых прямолинейностью конвейерной линии. Классически, устройство 5 транспортировки является ленточным или цепным конвейером, обеспечивающим линейное поступательное движение находящихся на нем объектов 2. Таким образом, объекты 2 одной серии в основном совершают поступательное движение в плоскости РС транспортировки. Как показано, в частности, на фиг. 1 и 2, для удобства в этом описании условно направление перемещения объектов 2 проходит вдоль горизонтальной оси Х системы координат X, Y, Z, содержащей вертикальную ось Z, перпендикулярную к горизонтальной оси Х, и поперечную ось Y, перпендикулярную к вертикальной оси Z и к горизонтальной оси Х, при этом Х и Y находятся в плоскости, параллельной относительно плоскости РС транспортировки, которая предпочтительно, но не обязательно является горизонтальной.
Положение объектов, рассматриваемое в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т, является фиксированным во время их перемещения и съемки рентгенографических изображений. Это фиксированное положение предполагает, в частности, отсутствие вращения объекта в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т, в частности, например, отсутствие вращения объекта вокруг возможной оси симметрии объекта. Например, объекты находятся на ленте конвейера в положении устойчивой опоры, возможно, на собственную плоскость укладки, такую как дно сосуда или ножки кресла.
В варианте изобретения можно предусмотреть опору для объектов 2. В этом случае эта опора является неподвижной в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т. Чтобы опора не влияла на измерения, согласно первому варианту, ее исключают из проверяемой области, чтобы она не проявлялась наложенной на проверяемую область в проекциях. Согласно второму варианту, ее коэффициент ослабления является ничтожным по отношению к коэффициенту ослабления объектов, и его можно приравнять к воздуху или к нулевому ослаблению. Согласно менее предпочтительному третьему варианту, геометрия опоры, а также ее положение в подвижной системе координат точно известны и повторяются для серии объектов, и ее коэффициент ослабления является точно известным и стабильным и, как правило, идентичным коэффициенту ослабления объектов серии объектов, чтобы учитывать опору в реконструкции и изолировать от геометрической модели объекта.
Поскольку положение объектов является стабильным (во время движения и съемки рентгенографических изображений), предпочтительно также, чтобы это положение в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т, было одинаковым для каждого объекта серии объектов.
Если это не так, то, согласно варианту изобретения, можно применить средство определения положения каждого объекта в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т, по отношению к общей системе координат установки, причем это положение учитывают, например, средства вычисления оконтуривания объекта в плоскостях сечений, которые будут описаны ниже. На этом предварительном этапе определяют положение каждого объекта. Он может включать в себя согласование в виртуальной системе координат снятых изображений с априорными оконтуриваниями объекта, которые могут, например, быть производными от априорной геометрической модели. Во всех случаях это предполагает определение оконтуриваний объектов и, возможно, трехмерной модели объектов на их основании в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т.
С другой стороны, понятно, что, если положение объектов является стабильным в ортонормированной подвижной системе координат, поступательно перемещающейся в направлении Т во время перемещения и съемки их изображений, то нет необходимости определять положение каждого объекта относительно общей системы координат установки.
Как показано на фиг. 4, во время своего поступательного перемещения объекты 2 образуют или проходят через так называемый объем Vt транспортировки. Плоскость PS является плоскостью, секущей объем Vt транспортировки, ортогональной к плоскости РС транспортировки и параллельной направлению Т перемещения. Например, плоскость PS является срединной плоскостью, которая делит объем Vt транспортировки на два одинаковых субобъема. Секущая плоскость PS является вертикальной плоскостью в случае, когда плоскость транспортировки является горизонтальной.
Как показано на фиг. 1 и 2, установка 1 содержит также по меньшей мере один источник Fj (где j меняется от 1 до NF) рентгеновской трубки 7, создающий направленный расходящийся пучок рентгеновских лучей, чтобы он проходил через объем Vt транспортировки и, в частности, проходил по меньшей мере через проверяемую область объекта 2. В вариантах, в которых установка содержит несколько источников Fj, как показано на фиг. 5 и 6, все источники, которые будут использованы для осуществления заявленного способа, должны быть расположены на одной базовой прямой Р, параллельной направлению Т перемещения вдоль прямолинейной траектории. Это не препятствует возможному наличию одного или нескольких вспомогательных источников (не показаны), которые могут использоваться для съемки других изображений.
Установка 1 содержит также датчики Ci, Cik изображений (где i меняется от 1 до N, и N может в некоторых случаях превышать или быть равным 3), чувствительных к рентгеновским лучам и расположенных таким образом, чтобы облучаться рентгеновскими лучами, выходящими из источника Fj и прошедшими через объем Vt транспортировки и, в частности, по меньшей мере через проверяемую область объекта 2. Разумеется, трубка или трубки 7 и датчики Ci, Cik изображений находятся за пределами объема Vt транспортировки, чтобы обеспечивать свободное перемещение объектов в этом объеме. Классически, рентгеновские трубки 7 и датчики Ci, Cik изображений расположены в камере, непроницаемой по отношению к рентгеновским лучам.
В некоторых вариантах выполнения датчик Ci, Cik изображений связан с единственным источником Fj в том смысле, что при осуществлении способа этот датчик Ci изображений предусмотрен таким образом, чтобы изображения, которые он выдает и которые учитываются в рамках способа, формировались только лучами, исходящими из связанного с ним источника Fj. Например, установка может быть выполнена таким образом, чтобы только лучи, выходящие из данного источника, достигали соответствующего датчика изображений, например, посредством соответствующего размещения поглощающих масок. Согласно другому примеру, которые можно комбинировать с предыдущим, съемку изображений датчиком изображений начинают, только когда активирован только единственный связанный с ним источник.
Однако в некоторых вариантах выполнения несколько датчиков изображений могут быть связаны с одним источником Fj, и/или несколько источников Fj могут быть связаны с одним датчиком изображений. В предпочтительном варианте выполнения несколько датчиков изображений связаны с одним источником Fj.
Как было указано выше, датчик Ci, Cik изображений соответствует физическому детекторному компоненту CC1, CC2, …, CCnmax, части физического детекторного компонента или соединению частей одного или нескольких физических детекторных компонентов.
Пучки рентгеновских лучей, выходящие из источника Fj, проходят по меньшей мере через проверяемую область и формируют на датчике изображений рентгенографическую проекцию проверяемой области в направлении Dji, Djik проекции (фиг. 1 и 2). Направление Dji, Djik проекции является ориентированным направлением вектора, исходящего из источника Fj и проходящего через центр применяемого для съемки датчика Ci, Cik изображений. Источник или источники Fj и датчики Ci, Cik изображений расположены таким образом, чтобы каждый датчик изображений принимал рентгенографическую проекцию проверяемой области в направлении проекции.
Установка 1 содержит также систему считывания, соединенную с датчиками Ci, Cik изображений таким образом, чтобы для каждого объекта 2 в ходе его перемещения считывать набор одномерных рентгенографических изображений обработки объекта, в котором каждое одномерное рентгенографическое изображение обработки содержит проекцию сечения объекта по плоскости Pk сечения, содержащей базовую прямую В. В частности, этот набор изображений включает в себя:
- такие одномерные рентгенографические изображения обработки для числа NK отдельных плоскостей Pk сечения, содержащих базовую прямую;
- для каждой плоскости Pk сечения число NP таких одномерных рентгенографических изображений обработки Spk, Sp’k, Sp”k, … проверяемой области, полученных по меньшей мере в трех разных направлениях Djik проекции в плоскости Pk сечения.
Этот набор изображений содержит, таким образом, для каждой плоскости Pk сечения во множестве плоскостей сечения, содержащих базовую прямую, по меньшей мере три одномерных рентгенографических изображения Spk обработки проверяемой области объекта, каждое из которых получено в разном направлении Djik проекции в плоскости Pk сечения.
На фиг. 2 показан контур нескольких отдельных плоскостей Pk, Pk’ сечения, содержащих базовую прямую В и, следовательно, содержащих источник Fj. Следует отметить, что в вариантах выполнения, содержащих несколько разных источников Fj, поскольку эти источники расположены на одной и той же базовой прямой В, данная плоскость Pk, Pk’, Pk”, … сечения содержит все источники Fj. Следует отметить, что отдельные плоскости Pk, Pk’, … сечения по определению не являются параллельными между собой, а расположены в виде веера вокруг базовой прямой В. Следовательно, базовая прямая является пересечением всех плоскостей Pk сечения, образующих вместе семейство плоскостей.
Таким образом, плоскость Pk сечения образована базовой прямой В и по меньшей мере одним чувствительным элементом Cik, Ci’k, Ci”k, … датчика изображений содержащимся в этой плоскости Pk сечения, и/или, как в примере на фиг. 9, линейным датчиком Cik, Ci’k, Ci”k, … изображений, содержащимся в плоскости Pk сечения. В случае линейного датчика он может быть ориентирован параллельно базовой прямой В или может быть ориентирован в направлении, которое пересекает базовую прямую В. Базовая прямая В является неподвижной для установки, следовательно, плоскость Pk сечения связана с этим чувствительным элементом Cik, содержащимся в плоскости Pk сечения, или с этим линейным датчиком Cik, содержащимся в плоскости Pk сечения. Таким образом, по меньшей мере в случае некоторых плоскостей Pk сечения плоскость сечения может пересекать объект 2.
Пересечение плоскости Pk сечения с объектом 2 определяет сечение объекта 2. Как было указано выше, каждая плоскость Pk сечения образует на своем пересечении с объектом оконтуривание объекта 2 в плоскости сечения, при этом оконтуривание образовано одной или несколькими двухмерными кривыми, рассматриваемыми вместе в плоскости сечения.
Следует заметить, что существует только одна плоскость Pk сечения, которая является параллельной относительно плоскости РС транспортировки. Выше было указано, что по меньшей мере в некоторых вариантах выполнения плоскость транспортировки считается горизонтальной. В некоторых вариантах применения изобретения серия объектов может быть серией сосудов, в частности, бутылок и, в частности, стеклянных бутылок. В случае этих сосудов в целом отмечается, что они имеют центральную ось, вдоль которой удлинена их форма, причем эта ось для некоторых бутылок может быть осью симметрии и даже осью симметрии тела вращения. Обычно транспортировку таких объектов производят с их центральной осью в вертикальном положении. Отсюда следует, что различные плоскости Pk сечения пересекают каждый объект, образуя разный угол с центральной осью объекта. В случае объекта, который в основном имеет огибающую или наружную поверхность цилиндрической формы тела вращения, плоскости Pk сечения секут объект таким образом, что наружный контур объекта проявляется в виде эллиптический кривой.
Кроме того, плоскость Pk сечения определяет проекцию этого сечения объекта на соответствующий чувствительный элемент Cik, содержащийся в плоскости Pk сечения, или на линейный датчик Cik изображений, ориентированный параллельно базовой прямой В и содержащийся в плоскости Pk.
Во время работы чувствительный элемент Cik, пересекаемы плоскостью Pk, или линейный датчик Cik изображений, пересекаемы плоскостью Pk, позволяет получить одномерное рентгенографическое изображение Spk проекции этого сечения в этой плоскости сечения.
В обоих случаях независимо от того, снято ли это одномерное рентгенографическое изображение линейным датчиком изображений или получено опосредованно посредством дискретизации при помощи единственного чувствительного элемента, это изображение будет использовано для обработки в рамках изобретения и, следовательно, будет считаться одномерным рентгенографическим изображением обработки.
В случае, представленном на фиг. 2, 3 и 5, где для съемки этого одномерного рентгенографического изображения обработки применяют единственный чувствительный элемент Cik, необходимо его формировать посредством дискретизации точечного изображения, снятого при помощи чувствительного элемента Cik в течение времени сканирования, соответствующего времени перемещения объекта между источником и чувствительным элементом Cik в ходе его перемещения, следовательно, путем расположения рядом друг с другом нескольких изображений, снятых последовательно во времени в течение времени сканирования применяемым чувствительным элементом Cik, который образует точечный датчик изображений. При этом отмечается, что каждое изображение, снятое последовательно во времени применяемым точечным датчиком Cik изображений, представляет собой пиксель одномерного рентгенографического изображения обработки. Время между двумя точечными изображениям, снятыми последовательно применяемым точечным датчиком Cik изображений, соответствует инкрементальному перемещению объекта вдоль траектории перемещения. Время сканирования соответствует, таким образом, времени, необходимому, чтобы все сечение объекта в плоскости Pk сечения прошло через опорную линию направления проекции. Отмечается также, что в этом случае каждый пиксель получают со строго идентичным направлением проекции, соединяющим источник Fj с чувствительным элементом Cik, поскольку все пиксели рентгенографического изображения обработки получают при помощи одного и того же чувствительного элемента Cik, только со смещением во времени.
В случае, представленном на фиг. 9, где для съемки этого одномерного рентгенографического изображения обработки применяют линейный датчик Cik изображений, оно может быть снято за одно время съемки или время интеграции датчика. Таким образом, линейное одномерное рентгенографическое изображение соответствует одновременной съемке нескольких точечных изображений, выдаваемых, каждое, чувствительным элементом, принадлежащим к набору чувствительных элементов, расположенных в линию по прямой, содержащейся в плоскости Pk сечения. При этом отмечается, что в этом случае каждый пиксель рентгенографического изображения обработки соответствует отдельному чувствительному элементу, и отсюда следует, что каждый пиксель получают с проекцией, соответствующей направлению вектора, соединяющего источник Fj с конкретным чувствительным элементом, соответствующим этому пикселю. Однако условно считают, что направление рентгенографической проекции для этого одномерного рентгенографического изображения обработки является направлением, которое соединяет источник Fj с центром линейного датчика изображений, применяемого для съемки этого одномерного рентгенографического изображения обработки. Следовательно, в данном случае рассматривают направление Djik проекции, которое образует среднее направление проекции для одномерного рентгенографического изображения обработки.
Каждый пиксель одномерного рентгенографического изображения обработки Spk образован значением, отображающим сигнал, принимаемый соответствующим чувствительным элементом в течение времени интеграции этого пикселя. Следовательно, значение этого сигнала зависит от интенсивности принимаемого рентгеновского луча, то есть зависит от совокупного ослабления, которому подвергается рентгеновский луч между источником Fj и соответствующим чувствительным элементом. Это зависит от толщины и от коэффициента материла или каждого из слоев материалов, через которые прошли рентгеновские лучи между источников Fj и соответствующим чувствительным элементом. Таким образом, каждое одномерное рентгенографическое изображение Spk обработки проверяемой области может быть представлено набором этих цифровых или аналоговых значений для всего сечения объекта в соответствующей плоскости сечения, причем этот набор значений получен за одно время съемки линейного датчика или за последовательные отрезки времени съемки точечного датчика изображений.
Для каждого измеряемого объекта и для каждой отдельной плоскости Pk сечения в рамках изобретения определяют оконтуривание объекта в рассматриваемой плоскости Pk сечения. Это определение в каждой плоскости сечения осуществляют на основании числа одномерных рентгенографических изображений обработки проверяемой области, полученных по меньшей мере в трех разных направлениях Djik проекции в плоскости сечения, то есть на основании по меньшей мере трех одномерных рентгенографических изображений обработки Spk этого сечения проверяемой области объекта, предпочтительно от 3 до 40, еще предпочтительнее от 8 до 15 изображений, каждое из которых получено в разном направлении Djik проекции в плоскости сечения.
Следует отметить, что это необходимо повторять для каждой плоскости сечения, которая пересекает проверяемую область объекта. Таким образом, повторение необходимо производить для NK плоскостей Pk сечения.
В примерах, представленных на фиг. 1-3, предусмотрено использование физических детекторных компонентов, которые являются линейными (на фиг. 2 показаны только два из этих линейных физических детекторных компонентов). В этих примерах каждый физический детекторный компонент CC1, CC2, …, CCnmax содержит линейную сеть элементов, чувствительных к рентгеновским лучам, распределенных вдоль опорной прямой Ln, образуя вместе с соответствующим источником Fj плоскость PPji проекции (фиг. 2). В данном примере опорные прямые Ln линейных физических детекторных компонентов являются параллельными между собой и ортогональными к плоскости РС транспортировки. В примере, представленном на фиг. 1, предусмотрено восемь линейных физических детекторных компонентов. Эти физические детекторные компоненты CCi расположены таким образом, что каждый из этих физических детекторных компонентов получает рентгенографическую проекцию проверяемой области объекта при помощи пучка рентгеновских лучей, выходящего из источника Fj во время перемещения объекта между источником Fj и датчиком. В каждой плоскости Pk сечения каждый линейный физический детекторный компонент CCi содержит единственный чувствительный элемент Cik. Следовательно, чувствительные элементы Cik каждого линейного физического детекторного компонента CCi могут, каждый, выдавать при дискретизации в течение времени сканирования, соответствующего времени перемещения объекта между источником и чувствительным элементом, то есть посредством расположения рядом друг с другом нескольких последовательно снятых во времени изображений, одномерное рентгенографическое изображение обработки Spk. Понятно, что в данной плоскости Pk сечения каждый чувствительный элемент, присутствующий в этой плоскости, принадлежит к отдельному линейному физическому детекторному компоненту и образует вместе с источником Fj отдельное направление проекции, и что получают одномерные рентгенографические изображения обработки Spk в разных направлениях Djik проекции, в данном случае в стольких разных направлениях проекции, сколько чувствительных элементов находятся в плоскости Pk сечения. Как было указано выше, предпочтительно линейные физические детекторные компоненты расположены таким образом, что образуют разные направления Dji, Djik проекции, попарно образующие между собой минимальный угол, по меньшей мере равный 3 градусам угла, предпочтительно по меньшей мере равный 5 градусам угла в плоскости Pk сечения, причем в каждой применяемой плоскости Pk сечения.
В примере на фиг. 5 отображен тот же принцип, но с двумя источниками F1 и F2, расположенными в линию на базовой прямой В, при этом каждый из них связан с несколькими, в данном случае с пятью линейными физическими детекторными компонентами, опорные прямые Li которых параллельны между собой и ортогональны к плоскости РС транспортировки. Таким образом, для каждой плоскости Pk сечения посредством дискретизации точечного изображения, снятого чувствительным элементом Cik линейного физического детекторного компонента, содержащимся в рассматриваемой плоскости сечения, для каждого линейного физического детекторного компонента получают 10 одномерных рентгенографических изображений обработки Spk в 10 разных направлениях Dji проекции.
В примере, представленном на фиг. 9-10, используют физические детекторные компоненты, которые являются матричными или двухмерными. В этом примере их число равно трем. В этом примере каждый физический детекторный компонент СС1, СС2, СС3 содержит матричную сеть элементов, чувствительных к рентгеновским лучам и распределенных в опорной плоскости. В данном примере опорные плоскости матричных физических детекторных компонентов СС, СС2, СС3 не являются параллельными между собой. Действительно, в этом примере каждый матричный физический детекторный компонент СС1, СС2, СС3 расположен таким образом, что его опорная плоскость является ортогональной к направлению проекции, образованному источником Fj и центром матричного физического детекторного компонента СС1, СС2, СС3. Однако матричные физические детекторные компоненты СС1, СС2, СС3 или по меньшей мере некоторых из них могут быть параллельными между собой. В этом примере их соответствующие опорные плоскости являются перпендикулярными к плоскости РС транспортировки. Для каждого матричного физического детекторного компонента СС1, СС2, СС3 по меньшей мере m линий чувствительных элементов Cik получают рентгенографическую проекцию проверяемой области объекта при помощи пучка рентгеновских лучей, выходящего из источника F, когда объект находится между источником Fj и датчиком. В каждой плоскости Pk сечения каждый матричный физический детекторный компонент CCi содержит линию чувствительных элементов, образующую линейный датчик Cik изображений. Таким образом, чувствительные элементы этого линейного датчика Cik изображений могут вместе снимать одномерное рентгенографическое изображение обработки Spk за одно время съемки или время интеграции датчика. Как правило, чувствительные элементы на матричном детекторном компоненте расположены в виде матричной компоновки с вертикальным (столбцы) и горизонтальным (строки) линейным расположением чувствительных элементов. В случае, когда матричный детекторный компонент CCi образует плоскость, не параллельную базовой прямой В, пересечение плоскостей Pk с плоскостью матричного детекторного компонента CCi является прямой, не совпадающей с физической компоновкой пикселей. В этом случае линейный датчик Cik изображений является группой чувствительных элементов, которая не следует горизонтальной или вертикальной линейности компоновки матричного детекторного компонента. Линейное изображение, соответствующее линейному датчику Cik изображений, который, таким образом, является частью матричного детекторного компонента CCi, можно получить, комбинируя значения, получаемые от чувствительных элементов, пересекаемых виртуальной прямой, отображающей линейный датчик Cik изображений, возможно, учитывая также пиксели, получаемые от соседних чувствительных элементов. Например, специалисту в данной области известно применение интерполяций и повторных дискретизаций при комбинировании пикселей.
Понятно, что в данной плоскости Pk сечения каждая линия чувствительных элементов образует линейный датчик Cik изображений в матричном физическом детекторном компоненте и вместе с источником Fj образует отдельное направление проекции и что одномерные рентгенографические изображения обработки Spk получют в разных направлениях Djik проекции, в данном случае в стольких же разных направлениях проекции, сколько имеется матричных физических детекторных компонентов CCi.
На основании оконтуриваний объекта в каждой отдельной плоскости сечения, получаемых, каждое, на основании рентгенографических изображений обработки по меньшей мере в трех разных направлениях проекции в этой плоскости сечения, можно для каждого измеряемого объекта определить по меньшей мере одно измерение линейного размера проверяемой области измеряемого объекта. Например, такое измерение линейного размера проверяемой области измеряемого объекта можно определить как расстояние между по меньшей мере двумя трехмерными точками, каждая из которых принадлежит к граничной поверхности проверяемой области. Для этого система считывания соединена с компьютерной системой, не ограничительный пример которой символически представлен на фиг. 3, но которая может быть системой любого типа. Согласно предпочтительному отличительному признаку выполнения, компьютерная система записывает при помощи датчиков Ci, Cik изображений для каждого объекта серии во время его перемещения рентгенографические изображения, получаемые из определенного числа рентгенографических проекций проверяемой области в разных направлениях проекции.
Как было указано выше, оконтуривание объекта содержит кривую или набор кривых, которые представляет собой пересечение граничных поверхностей объекта с плоскостью Pk сечения. В таком оконтуривании кривая или каждая кривая оконтуривания является плоской кривой, которую можно смоделировать при помощи параметрической системы, в частности, системы из одного или нескольких параметрических уравнений. Предпочтительно кривую или каждую кривую оконтуривания моделируют при помощи фиксированного числа параметров. Например, такая кривая оконтуривания может быть многоугольной кривой. В этом случае координаты вершин многоугольника могут выполнять роль параметров.
Среди возможных методов определения оконтуривания объекта в плоскости сечения можно применить алгоритм коррекции кривой, отталкивающийся от априорного оконтуривания объекта в плоскости сечения.
Такой алгоритм может быть итеративным алгоритмом, в частности, алгоритмом нелинейной регрессии.
Как показано на фиг. 12, итеративный алгоритм 100, который можно использовать, может итеративно осуществлять этап 110 моделирования, этап 120 сравнения и этап 130 уменьшения погрешности посредством коррекции одного или нескольких параметров в параметрической системе.
Предпочтительно в качестве первоначального этапа 101 такой алгоритм может учитывать 101 априорное оконтуривание DLk1 объекта в плоскости Pk сечения в качестве вычисленного оконтуривания первого ранга итерации. Такое априорное оконтуривание DLk1 состоит в определении, в данной плоскости сечения, первоначальной кривой или набора первоначальных кривых, предпочтительно достаточно близких к ожидаемому оконтуриванию, которое тем не менее не известно. Предпочтительно первоначальное оконтуривание позволяет определить число и порядок материалов, через которые будет проходить число рентгеновских лучей, излучаемых источником Fj, содержащихся в рассматриваемой плоскости сечения и принимаемых датчиком изображений после прохождения через объект. Это априорное оконтуривание DLk1 может быть получено из априорной параметрической модели объекта и/или из измерения одного или нескольких объектов одной серии при помощи измерительного устройства, и/или из введенных значений, и/или из выполненных чертежей, и/или из форм, выбранных оператором на интерфейсе человек-машина компьютерной системы. В случае серии полых цилиндрических объектов, содержащих только один материал и имеющих теоретическую центральную ось, перпендикулярную к плоскости транспортировки, оконтуривание в плоскости сечения может быть образовано внутренней первоначальной кривой и наружной первоначальной кривой, предпочтительно замкнутыми кривыми, например, типа окружности или эллипса или типа многоугольной кривой. Такие кривые будут исключительно эффективными для объектов в виде тела вращения вокруг теоретической центральной оси. Вместе с тем, их можно использовать с удовлетворительными результатами для объектов, сечение которых по плоскости, перпендикулярной к теоретической центральной оси, является сечением призматического типа.
Итеративный алгоритм может при этом итеративно осуществлять следующие этапы.
Повторяемым этапом может быть этап 110 моделирования, который предусматривает вычисление SIM, на основании вычисленного оконтуривания DLkr данного ранга r итерации объекта в плоскости сечения, числа NP, по меньшей мере равного трем моделированным одномерным рентгенографическим изображениям SSpkr, SSp’kr, SSp”kr проверяемой области, каждое из которых вычислено в плоскости Pk сечения в одном из разных направлений Djik проекции, которые были использованы для съемки одномерных рентгенографических изображений обработки Spk, Sp’k, Sp”k в плоскости сечения.
Таким образом, в данном случае рассматривают одно из одномерных рентгенографических изображений обработки Spk, Sp’k, Sp”k, то есть изображение, для которого реальные значения сигнала изображения известны и получены при помощи датчика изображений. Это изображение обязательно соответствует данному направлению Dijk проекции и, следовательно, данному источнику Fj и данному линейному датчику Cik изображений. Принцип состоит в вычислении, при каждом данном ранге итерации, оценки SSpkr, SSp’kr, SSp”kr значений, характеризующих сигнал, который может быть получен этим же датчиком для пучка рентгеновских лучей, излучаемого этим же источников Fj, но после прохождения объекта, оконтуриванием которого может быть вычисленное оконтуривание DLkr данного ранга r итерации. Во время первой итерации можно использовать вычисленное оконтуривание DLk1 первого ранга итерации, то есть первоначальное оконтуривание. Для следующих оконтуриваний используют оконтуривание, вычисленное во время предыдущей итерации.
При каждой итерации это вычисление осуществляют для числа одномерных рентгенографических изображений обработки, которые учитываются способом в плоскости сечения, а именно по меньшей мере трех, например, от трех до сорока, в смысле от трех до сорока, включая пределы, еще предпочтительнее от четырех до пятнадцати, в смысле от четырех до пятнадцати, включая пределы.
Таким образом, при каждой итерации можно осуществить сравнение 120 моделированных одномерных рентгенографических изображений SSpkr, SSp’kr, SSp”kr с одномерными рентгенографическими изображениями обработки Spk, Sp’k, Sp”k. Это сравнение можно осуществлять, например, для каждого моделированного одномерного рентгенографического изображения в виде функции сравнения СОМР, например, функции разностей значений сигнала моделированного одномерного рентгенографического изображения SSpk по отношению к значениям линейного рентгенографического изображения обработки Spk, соответствующего одной и той же рентгенографической проекции. Эта функция разностей может быть функцией разности от пикселя к пикселю. Это сравнение можно, например, производить, рассматривая вместе несколько или все моделированные одномерные рентгенографические изображения SSpkr, SSp’kr, SSp”kr с соответствующими одномерными рентгенографическими изображениями обработки Spk, Sp’k, Sp”k. Это сравнение может включать в себя, например, вычисление значения сравнения COMPVAL, которое может быть значением погрешности, например, значением квадратичной погрешности.
Отмечается, что этот итеративный алгоритм работает на линейных рентгенографических изображениях обработки в данной плоскости Pk сечения, то есть на изображениях, которые принадлежат к одной и той же плоскости. Вычисления, применяемые в алгоритме, относятся, таким образом, к данным, принадлежащим к одной определенной плоскости Pk, соответствующей плоским двухмерным единицам, каковыми являются оконтуривания. Это значительно упрощает вычисления по сравнению с итеративным алгоритмом, который бы использовал данные, соответствующие трехмерным единицам.
В зависимости от сравнения итеративный алгоритм может предусматривать, например, при каждой итерации перед последней, изменение 130 вычисленного оконтуривания, имеющего рассматриваемый ранг r итерации, в новое вычисленное оконтуривание DLk(r+1) более высокого ранга итерации (r+1), которое будет использовано для следующей итерации, то есть для итерации с более высоким рангом итерации. Осуществляемое изменение может быть функцией изменения MOD, которая может учитывать текущее оконтуривание Dlkr, значение сравнения COMPVAL, вычисленное функцией сравнения СОМР на этапе сравнения 120, и/или, возможно, другие вычисления, произведенные на предыдущих итерациях, чтобы уменьшить значение этой функции COMPVAL на следующей итерации согласно принципу методов понижения при оптимизации. Функцию изменения можно использовать, например, при помощи метода наименьших квадратов, например, метода наименьших линейных квадратов.
Действительно, вышеупомянутые этапы можно повторять, пока затем при последней итерации сравнение не достигнет заранее определенного критерия CRIT оптимизации. Достижение этого заранее определенного критерия оптимизации можно проверить во время этапа 125 проверки. Например, можно проверить, дает ли функция проверки определенное значение. Можно проверить один или разные критерии, такие как значение функции СОМР по отношению к пороговому значению, число r итераций по отношению к максимальному пороговому числу и т.д. Эта проверка может быть основана на значении сравнения COMPVAL, например, чтобы проверить достигло оно или превысило заранее определенное значение квадратичной погрешности.
Как правило, для каждой плоскости сечения число разных направлений Dji, Djik проекции составляет от трех до сорока, в смысле от трех до сорока, включая пределы, предпочтительно от четырех до пятнадцати, в смысле от четырех до пятнадцати, включая пределы. В связи с этим, согласно предпочтительному варианту выполнения, установка 1 содержит в данной плоскости сечения от трех до сорока датчиков Ci изображений, в смысле от трех до сорока, включая пределы. Согласно предпочтительному варианту выполнения, установка 1 содержит в данной плоскости сечения от четырех до пятнадцати датчиков Ci изображений, в смысле от четырех до пятнадцати, включая пределы.
Как будет более детально пояснено в дальнейшем тексте описания, компьютерная система запрограммирована таким образом, чтобы для каждого объекта анализировать указанные по меньшей мере три одномерных рентгенографических изображения, полученные в каждой плоскости сечения из указанных по меньшей мере трех рентгенографических проекций разных направлений, чтобы узнать трехмерную геометрию объекта.
В некоторых случаях можно построить цифровую геометрическую модель каждого измеряемого объекта. Эту цифровую геометрическую модель можно реализовать при помощи любого соответствующего метода со степенью точности, зависящей от точности, необходимой для требуемого измерения расстояния. Так, цифровая геометрическая модель может быть образована по меньшей мере двумя трехмерными точками, каждая из которых принадлежит к граничной поверхности проверяемой области объекта и которые не находятся в плоскости, ортогональной к направлению Dji, Djik проекции, а также не находятся в плоскости, параллельной направлению Т перемещения. Указанные по меньшей мере две точки могут принадлежать к двум разным граничным поверхностям, например, для измерения толщины или воздушного зазора.
Цифровая геометрическая модель может быть также образована одним и предпочтительно несколькими сечениями проверяемой области, при этом каждое сечение находится в плоскости, отличной от плоскости, ортогональной к направлению Dji, Djik проекции. Этой плоскостью сечения может быть одна из плоскостей Pk сечения, применяемая для съемки изображений, или может быть другой плоскостью. Кроме того, цифровая геометрическая модель может быть образована по меньшей мере одной трехмерной поверхностью проверяемой области, отличной от плоскости, ортогональной к направлению Dji, Djik проекции, и отличной от плоскости, параллельной направлению Т перемещения.
Таким образом, в соответствии с описанными выше методами получают для каждого объекта оконтуривание объекта в целом ряду плоскостей Pk сечения, содержащих базовую прямую В, то есть в плоскостях, расположенных в виде веера вокруг этой базовой прямой. Каждое оконтуривание можно представить в виде параметрической системы, например, в виде совокупности точек и/или сегментов, в частности, совокупности точек и/или сегментов, принадлежащих к наружным граничным поверхностям объекта. Полученный таким образом набор оконтуриваний можно рассматривать как геометрическую модель объекта, полученную путем измерения. В варианте геометрическую модель объекта можно построить на основании этого набора оконтуриваний, например, при помощи методов интерполяции. Так, оконтуривания в плоскостях Pk можно объединить в трехмерные кривые (границы), например, чтобы получить модель типа STL. Затем, полученную таким образом трехмерную поверхностную модель можно опять разрезать плоскостями разреза, которые соответствуют плоскостям, в которых сделаны измерения.
Таким образом, вышеупомянутые методы позволяют построить для измеряемого объекта при помощи компьютерной системы и на основании оконтуриваний объекта в каждой из отдельных плоскостей Pk сечения трехмерную цифровую геометрическую модель проверяемой области, содержащую:
- трехмерные точки пространства, каждая из которых принадлежит к граничной поверхности проверяемой области объекта;
- и/или по меньшей мере одну трехмерную поверхность проверяемой области.
В случаях, когда применяют определение трехмерной геометрической модели, можно определить измерение линейного размера проверяемой области измеряемого объекта, определяя расстояние между по меньшей мере двумя трехмерными точками трехмерной цифровой геометрической модели проверяемой области.
Разумеется, изобретение позволяет построить цифровую геометрическую модель с большим числом трехмерных точек или с облаками трехмерных точек.
Цифровую геометрическую модель строят, используя коэффициент ослабления материала или материалов объектов серии.
Выше было указано, что в некоторых вариантах выполнения изобретения оконтуривания в каждой плоскости сечения и, следовательно, в случае необходимости, цифровую геометрическую модель можно построить, используя априорную геометрическую модель проверяемой области для серии объектов. Иначе говоря, в таком случае для построения цифровой геометрической модели каждого объекта компьютерная система использует, с одной стороны, априорную геометрическую модель проверяемой области для серии объектов и, с другой стороны, коэффициент ослабления материала или различные коэффициенты ослабления различных частей каждого объекта серии.
Таким образом, компьютерная система учитывает коэффициент или коэффициенты ослабления материала или материалов объектов в ходе контроля для этой операции вычисления. Предпочтительно установка 1 содержит устройство предоставления для компьютерной системы коэффициента или коэффициентов ослабления материала или материалов объектов серии.
Это устройство представления может быть реализовано при помощи массовой памяти, интерфейса человек-машина или при помощи проводной или беспроводной информативной сети.
Точно так же, в некоторых вариантах выполнения компьютерная система располагает так называемой априорной геометрической моделью проверяемой области для осуществления операции вычисления. Так, установка 1 может содержать устройство предоставления для компьютерной системы априорной геометрической модели проверяемой области для серии объектов.
Устройство предоставления априорной геометрической модели проверяемой области для компьютерной системы представляет собой, например, массовую память, информативную проводную или беспроводную сеть или интерфейс человек-машина.
Как указано в определительной части, априорная геометрическая модель является цифровой моделью серии объектов, которую можно поместить в систему координат, связанную с устройством, и которая может служить в качестве инициализации для способа определения оконтуриваний объекта в каждой плоскости Pk сечения.
В отсутствие знания априорной геометрической модели реконструкция может быть исключительно дорогой с точки зрения вычисления, так как для каждой точки трехмерного пространства необходимо вычислить ее ослабление. Применение априорной геометрической модели позволяет производить измерения линейных размеров на объектах с достаточной точностью за очень короткое время и при небольших затратах.
Согласно первому варианту, априорную геометрическую модель получают при помощи цифровой модели компьютерного проектирования объектов серии, полученной во время проектирования (САПР 3D) объектов. В этом случае ее предоставляют для компьютерной системы при помощи различных возможных средств, таких как подключение через компьютерную сеть к базе данных, содержащей несколько моделей САПР, соответствующих разным сериям объектов, которые можно измерять в ходе производства, выбор оператором во внутренней базе данных установки и т.д.
Согласно второму варианту, априорную геометрическую модель получают из цифровой геометрической модели, построенной на основании измерения одного или нескольких объектов одной серии при помощи измерительного устройства, например, при помощи измерительной машины со щупом или при помощи аппарата осевой томографии, который отличается медлительностью относительно изобретения. Априорную геометрическую модель можно построить путем объединения измерений нескольких изготовленных объектов одной серии.
Согласно третьему варианту, априорная геометрическая модель является цифровой геометрической моделью, созданной компьютерной системой на основании введенных значений и/или выполненных чертежей и/или форм, выбранных оператором, на интерфейсе человек-машина системы.
Например, для получения априорной геометрической модели в случае гайки с шестью наружными гранями стандартного типа М13 с резьбовым отверстием достаточно произвести следующие действия. Оператор вводит на клавиатуре число и высоту граней, диаметр и шаг резьбы, при этом система выполнена с возможностью проверять метрические гайки. Она не получает никакого дополнительного точного размера. В другом примере для контроля сосуда из одного материала из стекла или из синтетического полимерного материала, такого как полиэтилен или полиэфир, оператор в качестве информации указывает только, что объект является замкнутым цилиндром с дном, над которым находится конус, при этом два диаметра, две высоты и толщина являются достаточными, чтобы система знала априорную геометрическую модель контролируемого объекта. Согласно еще одному примеру, компьютерная система может через свои интерфейсы получать технические описания априорной модели, такие как число, диаметры, глубины и положения различных отверстий, присутствующих в поверхности, которые могут быть частью проверяемой области большего объекта. Описание может быть геометрическим, например, если компьютерная система получает число и общий вид граничных поверхностей, позволяющие сделать описание, число полостей, число сторон или граней многогранника. Понятно, что априорная геометрическая модель должна по меньшей мере содержать достаточно технических, геометрических, топологических и/или численных данных, чтобы информировать компьютерную систему о трехмерной структуре объекта, при этом степень детализации и точности этих данных может быть очень низкой, не сказываясь при этом отрицательно на требуемой точности для линейных измерений.
Одним из преимуществ, обеспечиваемых определением геометрической модели, является то, что при помощи одной и той же компьютерной системы или при помощи другой системы, которой предоставлена модель, для каждого объекта серии на основании цифровой геометрической модели проверяемой области, соответствующей указанному объекту серии, можно определить по меньшей мере одно линейное измерение проверяемой области в любом направлении, то есть не обязательно содержащемся в плоскости, ортогональной к направлению проекции и не обязательно содержащемся в плоскости, параллельной направлению перемещения.
На объектах 2 проверяют по меньшей мере один размер и, как правило, несколько размеров. Как правило, задачей является сравнение размеров, полученных на объектах, с требуемыми значениями, например, определенными службой контроля качества. Эти измерения размеров или отклонения этих измерений по отношению к требуемым значениям могут быть выведены на экран, записаны в памяти и т.д. Они могут также служить для принятия решений о соответствии объектов, которые могут отсортировываться автоматически.
Измерения можно получать из измерений цифровой геометрической модели проверяемой области, построенной для каждого объекта. Например, проверяемая область может содержать отверстие. В цифровой геометрической модели можно определить измерения диаметра или глубины отверстия, вычислив на цифровой геометрической модели расстояния между диаметрально противоположными элементами поверхности. Если объект выполнен из одного материала, определение положения элементов поверхности может быть более точным при минимуме вычислений.
Другим средством определения измерений диаметра или глубины отверстия является сравнение цифровой геометрической модели проверяемой области с контрольной или теоретической геометрической моделью.
Контрольная геометрическая модель является идеальной моделью серии контролируемых объектов. Для осуществления размерного контроля можно сравнить цифровую геометрическую модель проверяемой области с контрольной геометрической моделью при помощи алгоритма, включающего в себя совмещение моделей, затем измерение отклонений между моделями. Контрольную геометрическую модель можно также получить при помощи системы САПР.
Таким образом, можно произвести операцию совмещения цифровой геометрической модели проверяемой области с контрольной геометрической моделью, затем определить отклонения размера, измерив расстояния между элементами поверхности, принадлежащими к цифровой геометрической модели. В примере измерения отверстия можно виртуально расположить цилиндр максимального диаметра, вписывающийся в смоделированную внутреннюю поверхность отверстия, и точно так же цилиндр минимального размера, содержащий указанную смоделированную внутреннюю поверхность, и в качестве измерений диаметра отверстия в проверяемой области рассматривать диаметр одного и/или другого вписанного и описанного цилиндров. Этот тип анализа возможен также для проверки внутренних диаметров в горлышке стеклянных бутылок, полученных в результате процессов прессования-выдувания или выдувания-выдувания, или бутылок из пластика.
Согласно варианту изобретения, контрольная геометрическая модель и априорная геометрическая модель являются одной и той же геометрической моделью.
Согласно другому варианту изобретения, априорная геометрическая модель является менее точной, менее полной и/или отличающейся от контрольной геометрической модели.
Для осуществления таких измерений установка предпочтительно содержит устройство предоставления для компьютерной системы значений линейных размеров и/или допусков на этих размерах, и/или контрольных геометрических моделей.
Согласно предпочтительному отличительному признаку выполнения, компьютерная система соединена с устройством визуализации значений линейных измерений проверяемой области и/или размерных отклонений по отношению к контрольным значениям, и/или отклонений между цифровой геометрической моделью проверяемой области и контрольной геометрической моделью. Например, для гайки на экран выводятся такие измерения, как глубина витка, средний шаг витка, средний радиус дна витка, высота, минимальный или максимальный внутренний диаметр, плоскостность одной или нескольких из ее наружных сторон. Для стеклянного или пластикового сосуда система выводит на экран общую высоту и, например, минимальный диаметр и максимальный диаметр цилиндрической части на высоте, заранее определенной посредством регулировок проверяемых размеров. Размеры могут выводиться на экран с разными цветами в зависимости от их соответствия или не соответствия.
Согласно предпочтительному отличительному признаку выполнения, компьютерная система соединена с устройством сортировки объектов в зависимости от линейного измерения проверяемой области. Таким образом, устройство сортировки может, например, при помощи эжектора, выбрасывать из устройства транспортировки объекты, признанные как дефектные с учетом измеренных линейных размеров.
Согласно предпочтительному отличительному признаку выполнения, компьютерная система может быть соединена с устройством маркировки объектов в зависимости от линейного измерения проверяемой области. Это устройство маркировки может записывать, например, измеренные линейные размеры или состояние соответствия или состояние дефектности объекта.
Относительные положения источников Fj и датчиков Ci, Cik в неподвижной системе координат X,Y,Z установки известны компьютерной системе. Это положение можно получить путем предположения или посредством калибровки. Калибровка состоит, например, в введении в установку точно обработанного калибра.
Разумеется, относительные положения источников Fj и датчиков Ci, Cik изображений являются самыми разными, при этом следует напомнить, что источники Fj и датчики Ci, Cik изображений расположены за пределами объема Vt транспортировки.
Согласно варианту выполнения, установка 1 содержит только один источник Fj = F1, расположенный вдоль одной стороны объема Vt транспортировки, и ряд линейных физических детекторных компонентов CC1, CC2, CCnmax, опорная линия которых является перпендикулярной к плоскости транспортировки и каждый из которых содержит датчики изображений для множества плоскостей сечений, расположенные с противоположной стороны объема Vt транспортировки, чтобы принимать лучи, выходящие из источника Fj и прошедшие через проверяемую область. В этом примере источник имеет апертуру Of, которую измеряют по меньшей мере в одной какой-либо плоскости, например, в плоскости X,Y на фиг. 1, и которая превышает или равна 120°. Эту апертуру Of рассматривают на выходе из источника в случае, когда между источником и объемом Vt или между объемом Vt и датчиками изображений установка содержит экраны ограничения пучков только полезными пучками, чтобы уменьшить рассеяние.
Согласно другому варианту выполнения, по меньшей мере два источника Fj (F1 и F2) рентгеновских лучей расположены раздельно в двух разных положениях вдоль базовой прямой В, параллельной относительно прямолинейной траектории объектов, и по меньшей мере три физических детекторных компонента, содержащие, каждый, для множества плоскостей сечения датчики изображений, чувствительные к рентгеновским лучам, расположены таким образом, чтобы каждый источник был связан в каждой плоскости сечения по меньшей мере с одним датчиком изображений и чтобы каждый датчик изображений был связан с источником и принимал рентгеновские лучи, исходящие из указанного источника и проходящие через проверяемую область. В этом примере каждый источник имеет апертуру, превышающую или равную 60°, при этом сумма апертур обоих источников превышает или равна 120°.
В примере выполнения, представленном на фиг. 5 и 6, установка 1 содержит два источника F1, F2, расположенные в линию на базовой прямой В, параллельной траектории объектов 2. Оба источника F1, F2 связаны, каждый, с отдельной трубкой 7. Установка 1 содержит также пять линейных физических детекторных компонентов СС11, СС12, СС13, СС14 и СС15, которые расположены с их опорной линией, перпендикулярной к плоскости транспортировки, и которые содержат, каждый, для множества плоскостей сечения датчики изображений, чувствительные, каждый, к рентгеновским лучам, выходящим из первого соответствующего источника F1. Установка 1 содержит также пять линейных физических детекторных компонентов СС21, СС22, СС23, СС24 и СС25, которые расположены с их опорной линией, перпендикулярной к плоскости транспортировки и которые содержат, каждый, для множества плоскостей сечения датчики изображений, чувствительные, каждый, к рентгеновским лучам, выходящим из второго соответствующего источника F2.
Согласно этому примеру выполнения, следует отметить, что источник (F1 и F2 в данном примере), из которого выходит расходящийся пучок рентгеновских лучей, расположен с одной стороны от секущей плоскости PS таким образом, чтобы его пучок проходил через секущую плоскость PS и через проверяемую область, тогда как по меньшей мере один датчик Ci изображений, связанный с указанным источником Fj для приема рентгеновских лучей, выходящих из источника Fj, расположен с противоположной стороны относительно секущей плоскости PS. (В этом примере такими являются пять датчиков С11, С12, С13, С14 и С15 изображений, чувствительных, каждый, к рентгеновским лучам, исходящим из соответствующего источника F1, и пять датчиков С21, С22, С23, С24 и С25 изображений, чувствительных, каждый, к рентгеновским лучам, исходящим из соответствующего источника F2).
Согласно предпочтительному варианту выполнения, источник или источники Fj расположен/расположены в плоскости РС транспортировки. Предпочтительно эти источники взаимодействуют с соответствующими датчиками изображений, находящихся противоположно к ним относительно секущей плоскости PS. Таким образом, в случае транспортировки объектов, находящихся на плоском конвейере, это расположение способствует тому, что в рентгенографических изображениях проекции объектов не накладываются на проекцию конвейера. Таким образом, в цифровой геометрической модели объектов можно точно определить часть объекта, входящую в контакт с конвейером.
Согласно предпочтительному отличительному признаку выполнения, расположение датчиков Ci изображений и источников являются таким, что рентгеновские лучи, выходящие из источника или источников Fj и достигающие датчиков Ci изображений, проходят только через одну проверяемую область за один раз. Иначе говоря, рентгеновские лучи проходят только через один объект за один раз. Следует отметить, что установка может содержать систему для контроля промежутка между последовательно движущимися объектами.
Задачей изобретения является разработка способа, который является не только быстрым, но также недорогим и позволяет вычислять трехмерную геометрию каждого объекта, транспортируемого на конвейере, с точностью, необходимой для размерного контроля. Изобретение должно уменьшить число изображений, необходимых для реконструкции, до минимального числа, позволяющего добиться требуемой размерной точности. Например, при девяти проекциях и при ограниченном числе изображений проверяемой области изобретение позволяет измерить с точностью +/-0,05 мм внутренний диаметр цилиндра от 10 до 120 мм. Предпочтительно заявленная установка содержит от одного до четырех источников Fj и предпочтительно один или два источника Fj и предпочтительно число датчиков изображений, позволяющее снимать в каждой плоскости сечения рентгенографические проекции в разных направлениях проекции в количестве от четырех до пятнадцати.
Согласно изобретению, датчики изображений и источник или источники следует располагать таким образом, чтобы комбинация указанных по меньшей мере трех направлений проекции оптимизировала определение оконтуривания проверяемой области объектов, транспортируемых на конвейере, в каждой из множества плоскостей сечения, содержащих базовую прямую В, параллельную прямолинейной траектории Т объектов, с учетом того, что необходимо оставлять проходимый объем Vt свободным для прохождения объектов. Предпочтительно в рамках изобретения применяют нижеследующие правила, причем эти правила действительны для линейных или матричных датчиков изображений.
В дальнейшем угол будет считаться абсолютной величиной. На фиг. 7 и 8 показаны два направления Dji и D’ji проекции, которые являются также векторами. В данном случае рассматривают два направления Dji и D’ji проекции, которые содержатся в одной плоскости Pk сечения. На этих фигурах показаны угол а между этими двумя направлениями проекции, то есть 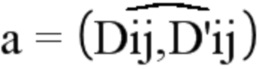 , и угол s, дополняющий угол а, то есть s = 180° - а. По определению полезный угол α между двумя разными направлениями Dji и D’ji проекции в их плоскости Pk сечения является наименьшим из углов а и s, то есть α = Min(a, s). Таким образом, полезный угол α является наименьшим из углов, образованных двумя прямыми, по которым проходят направления Dji, D’ji проекции.
, и угол s, дополняющий угол а, то есть s = 180° - а. По определению полезный угол α между двумя разными направлениями Dji и D’ji проекции в их плоскости Pk сечения является наименьшим из углов а и s, то есть α = Min(a, s). Таким образом, полезный угол α является наименьшим из углов, образованных двумя прямыми, по которым проходят направления Dji, D’ji проекции.
Согласно предпочтительному варианту изобретения, для каждого объекта и для каждой плоскости Pk сечения среди указанных по меньшей мере трех рентгенографических изображений, полученных из рентгенографических проекций по меньшей мере в трех разных направлениях проекции, считывают по меньшей мере два изображения, полученные из двух рентгенографических проекций в двух разных направлениях Dji и D’ji проекции, образующих между собой полезный угол α, превышающий или равный 45° и меньший или равный 90°. Согласно предпочтительному варианту выполнения, для каждого объекта и для каждой плоскости сечения среди указанных по меньшей мере трех рентгенографических изображений, полученных из рентгенографических проекций в разных направлениях проекции, считывают по меньшей мере два изображения, полученные из двух рентгенографических проекций в двух разных направлениях, образующих между собой полезный угол α, превышающий или равный 60° и меньший или равный 90°.
Для этого заявленная установка 1 содержит по меньшей мере один источник и два датчика изображений, расположенные таким образом, чтобы направления принимаемой ими проекции проверяемой области имели между собой полезный угол α, превышающий или равный 45° и меньший или равный 90° и предпочтительно превышающий или равный 60° и меньший или равный 90°.
Например, как показано на фиг. 5, полезный угол α между направлениями D15 и D11 и между направлениями D13 и D25 превышает 45°. Разумеется, понятно, что по меньшей мере один полезный угол превышает или равен 45° и меньше или равен 90° и предпочтительно по меньшей мере один полезный угол превышает или равен 60° и меньше или равен 90°, а другие полезные углы между двумя направлениями Dji, D’ji являются любыми. На основании этого правила специалист в данной области сможет найти расположение, которое дает наиболее полное распределение направлений проекции проверяемой области.
В частном случае можно предусмотреть, чтобы источники находились в плоскости РС транспортировки и чтобы физические детекторные компоненты располагались таким образом, чтобы плоскость РС транспортировки была одной из плоскостей Pk сечения. Это условие применимо в плоскости Pk сечения, соответствующей плоскости РС транспортировки, а именно для каждого объекта и для горизонтальной плоскости Pk сечения, совпадающей с плоскостью PС транспортировки, среди указанных по меньшей мере трех рентгенографических изображений, полученных из рентгенографических проекций в разных направлениях проекции, считывают по меньшей мере два изображения, полученные из двух рентгенографических проекций в двух разных направлениях, образующих между собой полезный угол α, превышающий или равный 45° и меньший или равный 90°.
Предпочтительно полезный угол α между двумя последовательными направлениями Dijk проекции в данной плоскости Pk сечения являются идентичным для всех последовательных направлений Dijk проекции, применяемых для съемки одномерных изображений обработки в данной плоскости Pk сечения. Иначе говоря, направления Dijk проекции, применяемые для съемки по меньшей мере трех одномерных изображений обработки в данной плоскости Pk сечения, отстоят друг от друга в угловом направлении равномерно в данной плоскости Pk сечения. Предпочтительно, направления проекции, применяемые для съемки по меньшей мере трех одномерных изображений обработки в данной плоскости Pk сечения, распределены в угловом направлении в плоскости Pk сечения таким образом, чтобы перекрывать угловую амплитуду, измеряемую в плоскости Pk сечения, перекрываемую апертурой Of источника или источников Fj, предпочтительно таким образом, чтобы перекрывать по меньшей мере 50% этой угловой амплитуды, предпочтительно по меньшей мере 70% этой амплитуды.
Согласно другому предпочтительному отличительному признаку, для каждого объекта компьютерная система считывает по меньшей мере одно рентгенографическое изображение проверяемой области, соответствующее направлению проекции, образующему в проекции на плоскость РС транспортировки определенный угол раскрытия β с направлением Т перемещения.
Как показано на фиг. 9, рассматривают угол р между направлением проекции (вектор Dji), приведенным в ортогональной проекции на плоскость РС транспортировки, и траекторией объектов (вектор Т), то есть угол р = (Dji, T), то есть р = (D11, T) и p = (D12, T) в примере, показанном на фиг. 9. Угол q, дополняющий угол р, равен q = 180° - p. По определению угол раскрытия β между направлением Dji проекции, приведенным в ортогональной проекции на плоскость РС транспортировки, и траекторией Т является наименьшим из углов р и q, то есть β = Min (p, q). Таким образом, угол раскрытия β является наименьшим из углов, образованных обеими прямыми, на одной из которых находится направление Dji проекции, приведенное в ортогональной проекции на плоскость РС транспортировки, а на другой - траектория Т.
Согласно еще одному предпочтительному отличительному признаку, для каждого объекта компьютерная система считывает по меньшей мере одно рентгенографическое изображение проверяемой области, соответствующее направлению Dji, Djik проекции, образующему с направлением Т перемещения угол раскрытия β, составляющий от 10° до 60°. Иначе говоря, заявленная установка содержит по меньшей мере один источник и датчик Ci изображений, расположенные таким образом, что, когда объект проходит через поле датчиков изображений, направление Dji, Djik проекции проверяемой области на датчик Ci изображений образует угол раскрытия β с направлением Т перемещения, составляющий от 10° до 60°.
Говоря другими словами, конфигурация установки 1 оптимизирована, чтобы уменьшить ее габарит в направлении перемещения и одновременно сохранить адаптированный для объектов проходимый объем Vt и высокое качество реконструкции.
С учетом проходимого объема Vt установка не производит проекции вокруг направления Т перемещения. Проходимый объем Vt задает минимальный угол раскрытия βmin. Например, минимальный угол раскрытия βmin = 10°. Нет ни одного датчика, расположенного таким образом, чтобы получать проекцию с углом раскрытия β менее 10°.
Из всего вышесказанного следует сделать вывод, что распределение углов проекций для каждого объекта не обязательно является однородным.
Как показано на фиг. 9, распределение углов проекции может иметь пропуск, называемый областью мертвого угла, величиной в 2 × 10°, то есть 20°, вместо полного перекрывания на 180°.
Например, как показано на фиг. 9, заявленная установка содержит по меньшей мере один источник F1 и два физических детекторных компонента СС1, СС2, в данном случае среди трех и, например, двухмерных, каждый из которых содержит для множества плоскостей Pk сечения датчики C1k, C2k, C3k изображений, для которых направления D11, D12 проекции, приведенные в ортогональной проекции на плоскость РС транспортировки, образуют с направлением Т перемещения угол раскрытия β, составляющий от 10° до 60°, соответственно соответствующий углам р и q. Точно так же, установка, показанная на фиг.5, содержит датчик СС11 изображений, связанный с источником F1, направление D11 проекции которого образует с направлением Т перемещения угол раскрытия β, составляющий от 10° до 60°.
Физические детекторные компоненты, которые образуют датчики Ci изображений, как правило, являются матричными или линейными.
Согласно предпочтительному варианту изобретения, установка содержит линейные физические детекторные компоненты. Согласно этому предпочтительному варианту, каждый из физических детекторных компонентов CCi, CCi’ содержит линейную сеть элементов, чувствительных к рентгеновским лучам и распределенных вдоль опорной прямой Li, Li’, образующей с соответствующим источником Fj плоскость PPji, PPji’ проекции, содержащую направление Dji проекции (фиг. 2). Эти физические детекторные компоненты Ci расположены таким образом, что по меньшей мере m чувствительных элементов каждого из датчиков изображений принимают рентгенографическую проекцию проверяемой области при помощи пучка рентгеновских лучей, выходящего из соответствующего источника Fj, с плоскостями PPji проекции для различных физических детекторных компонентов, которые различаются между собой и не являются параллельными плоскости РС транспортировки. Число m чувствительных элементов каждого линейного физического детекторного компонента превышает 128, предпочтительно превышает 512. Расстояние межу соседними чувствительными элементами (называемое «шаг» или “pitch” на английском языке) и/или размер чувствительных элементов предпочтительно меньше 800 мкм. Частота считывания линий изображений предпочтительно превышает 100 Гц, предпочтительно превышает 1 кГц. Разумеется, эти параметры определены в зависимости от размера объектов, от требуемой точности и от скорости движения. Таким образом, располагая соответствующим образом физические детекторные компоненты, можно получать плоскости Pk, отстоящие друг от друга вертикально на значение шага, при этом промежуток измеряют на уровне датчиков. Число плоскостей Pk сечения может достигать 128, даже 512 и даже больше.
Согласно предпочтительному отличительному признаку выполнения, опорные прямые Li по меньшей мере трех линейных физических детекторных компонентов Ci являются параллельными между собой.
Согласно другому предпочтительному отличительному признаку выполнения, опорные прямые Li по меньшей мере трех линейных физических детекторных компонентов Ci являются ортогональными к плоскости РС транспортировки.
Согласно варианту, источник Fj расположен таким образом, чтобы его пучок проходил через проверяемую область, затем через плоскость РС транспортировки. Кроме того, по меньшей мере один соответствующий линейный физический детекторный компонент расположен противоположно к источнику Fj относительно плоскости РС транспортировки и таким образом, чтобы его опорная прямая Li была параллельной относительно плоскости РС транспортировки.
Согласно этим вариантам выполнения с линейными физическими детекторными компонентами система считывания считывает при помощи каждого из указанных по меньшей мере трех физических детекторных компонентов Ci при каждом инкрементальном перемещении каждого объекта по траектории линейные рентгенографические изображения проверяемой области в количестве, выбранном таким образом, чтобы для каждого объекта вся проверяемая область оказалась полностью отображенной на всех линейных рентгенографических изображениях. Таким образом, во время перемещения объекта каждый датчик изображений может снимать линейные рентгенографические изображения таким образом, чтобы вся проверяемая область оказалась полностью отображенной на всех линейных рентгенографических изображениях, получаемых при помощи указанного датчика изображений. Так, для каждого объекта получают по меньшей мере три набора линейных рентгенографических изображений проверяемой области, которые затем подвергают анализу. Можно получать матричные рентгенографические изображения путем расположения рядом друг с другом наборов линейных рентгенографических изображений. Однако реконструкция геометрической модели и измерение этого не требуют в обязательном порядке.
Необходимо отметить, что с учетом проходимого объема Vt ни одну рентгенографическую проекцию не считывают в области мертвого угла (β<±10°), находящейся с двух сторон от направления Т перемещения. Несмотря на отсутствие рентгенографических проекций в этом интервале углов, заявленный способ позволяет построить, например, при помощи априорной геометрической модели, точную и полную цифровую геометрическую модель объекта. Это позволяет производить измерения линейного размера на всей цифровой геометрической модели и, в частности, в направлениях, не ортогональных к возможным направлениям проекции, в том числе измерения линейного размера в направлениях измерения, ортогональных к недостающим направлениям проекции, соответствующим области мертвого угла, находящейся с двух сторон от направления Т перемещения. Действительно, без заявленного способа, например, при применении «полных» традиционных методов, предназначенных для осевой томографии, в случае, когда ни одна рентгенографическая проекция не снимается в направлениях мертвого угла, при этом построенная модель имеет также в угловом секторе, ортогональном к мертвому углу, погрешности реконструкции, делающие невозможным точное определение поверхности и, следовательно, делающие невозможным любое измерение линейного размера объекта, даже только из одного материала.
Таким образом, как показано на фиг. 10 и 11, согласно изобретению, ни одна проекция не возможна в области мертвого угла, равной, например, 20° (βmin = 10°). В известных решениях ни одно точное измерение не может быть произведено в направлении А, которое не является ортогональным ни к одному из направлений проекции. Направление А не находится ближе к перпендикуляру какого-либо из направлений проекции, чем на 10°, в том смысле, что в ортогональной проекции на плоскость РС транспортировки оно имеет угловое отклонение не менее 10 градусов угла с любым из направлений проекции. При реконструкции на основании априорных моделей серии объектов и при постоянном и равномерном ослаблении измерение внутреннего диаметра в направлении А (расстояние а1) и измерение расстояния между двумя наружными гранями, перпендикулярными к направлению А (расстояние а2), являются надежными и точными. Иначе говоря, трехмерная геометрия, определенная для проверяемой области, не имеет недостающих или размытых границ в направлении А.
Разумеется, число источников, число соответствующих каждому источнику датчиков изображений и их относительное расположение определяют соответствующим образом в зависимости от требуемой степени точности измерения, от формы объектов и от промежутков между ними на конвейере.
Таким образом, как схематично показано на фиг. 13, заявленный способ предусматривает:
- транспортировку объектов (TRANS OBJ),
- во время транспортировки съемку (ACQUIMAGE) при помощи датчиков Ci, Cik изображений, для каждого объекта во время его перемещения, набора одномерных рентгенографических изображений обработки, включающего в себя:
- одномерные рентгенографические изображения обработки для числа NK разных плоскостей Pk сечения, содержащих базовую прямую;
- для каждой отдельной плоскости Pk сечения число NP одномерных рентгенографических изображений обработки Spk проверяемой области, полученных по меньшей мере в трех разных направлениях Dijk проекции в плоскости сечения;
- для каждого измеряемого объекта и для каждой отдельной плоскости Pk сечения определение (CALC DLk), при помощи компьютерной системы, оконтуривания DLk объекта в рассматриваемой плоскости Pk сечения на основании указанных по меньшей мере трех одномерных рентгенографических изображений обработки Spk проверяемой области, полученных по меньшей мере в трех разных направлениях Dijk проекции в плоскости сечения;
- и определение (MES) для каждого объекта, на основании оконтуриваний объекта в каждой отдельной плоскости сечения, по меньшей мере одного измерения линейного размера проверяемой области измеряемого объекта.
Способ позволяет производить в реальном времени компьютерную обработку изображений для создания трехмерной модели с целью измерения быстро движущихся объектов в ходе производства. Расположение и поступательное движение позволяют работать в плоскостях Pk сечения. Можно использовать алгоритмы реконструкции в плоскостях Pk сечения, информативно манипулирующие двухмерными геометриями, что, с точки зрения информатики, намного быстрее, чем манипулировать трехмерными данными. Таким образом, при помощи компьютера можно манипулировать параметрическими кривыми, что намного быстрее, чем манипулировать элементами элементарных объемов объемной модели. Способ может учитывать априорные данные объектов, чтобы еще больше ограничить компьютерную вычислительную мощность, необходимую для его осуществления. Предложенный способ обеспечивает реконструкцию без зоны погрешности, называемой “missing edge”, в направлении, ортогональном к перемещению, несмотря на отсутствие изображения в направлении проекций, близких к направлению перемещения.
Благодаря геометрии съемки, предложенной в рамках способа, задача трехмерной реконструкции объекта на основании считываемых рентгенографических данных раскладывается на NK задач реконструкции наклонных двухмерных сечений объекта, что ограничивает компьютерную вычислительную мощность, необходимую для осуществления способа. Действительно, задача трехмерной реконструкции на основании А съемок на С линейных датчиках дает AxCxNk данных, позволяющих оценить примерно AxCxNk вокселей в алгебраическом подходе путем решения линейной системы порядка AxCxNk на AxCxNk. Стоимость такой операции составляет порядка (AxCxNK)^3 при применении метода гауссова типа и iter3Dx(A+C+NK)xAxCxNK при применении итеративного метода, использующего полый характер матрицы, с iter3D итерациями.
При подходе, разделенном на NK задач реконструкции наклонных двухмерных сечений объекта, необходимо решить NK линейных систем порядка АхС на АхС, то есть со стоимостью порядка NKx(AxC)^3 при применении метода гауссова типа (получают выигрыш с коэффициентом NK^2) и iter2D*(A+C)xAxCxNK в данном случае в целом с iter2D<iter3D и, разумеется, (A+C) < (A+C+NK). Следовательно, способ требует намного меньше вычислений и, следовательно, меньше компьютерной мощности. Этот выигрыш в сложности проявляется в том, что в каждом двухмерном сечении можно построить кривые, что намного проще, чем построить поверхность в трех измерениях: объем данных в локальной памяти является меньшим, и сложность управления кривыми намного ниже, чем при управлении поверхностями.
Следует отметить, что поскольку траектория объектов представляет собой поступательное движение и что каждая из плоскостей сечения содержит базовую прямую и, следовательно, является параллельной относительно траектории объектов, каждая из плоскостей Pk сечения является инвариантной относительно объекта во время поступательного движения. Таким образом, все одномерные рентгенографические изображения обработки Spk проверяемой области, полученные в одной и той же плоскости Pk сечения, являются одномерными рентгенографическими изображениями одного и того же сечения объекта, следовательно, одного и того же оконтуривания объекта. Таким образом, понятно, что предложенная способом геометрия съемки позволяет работать напрямую на данных, принадлежащих к одной плоскости, что значительно упрощает вычисления.
Необходимо отметить, что при промышленном серийном изготовлении сразу несколько серий могут поступать одновременно на одну линию изготовления или контроля. В этом случае установка содержит систему, указывающую компьютерной системе серию, к которой принадлежит каждый из объектов, чтобы осуществить заявленный способ для всех объектов одной серии. Действительно, заявленную установку можно применять для проверки потока изготовленных объектов, состоящего ил нескольких разных серий объектов, например, из первой серии и второй серии. Серии могут различаться по форме объектов или по коэффициенту ослабления или по тому и другому одновременно. В этом случае установку необходимо оснастить средством для предоставления компьютерной системе априорной геометрической модели каждой серии объектов, коэффициента ослабления каждой серии объектов и необходимо предусмотреть средство, связывающее в компьютерной системе рентгенографические изображения каждого объекта с серией, к которой он принадлежит.
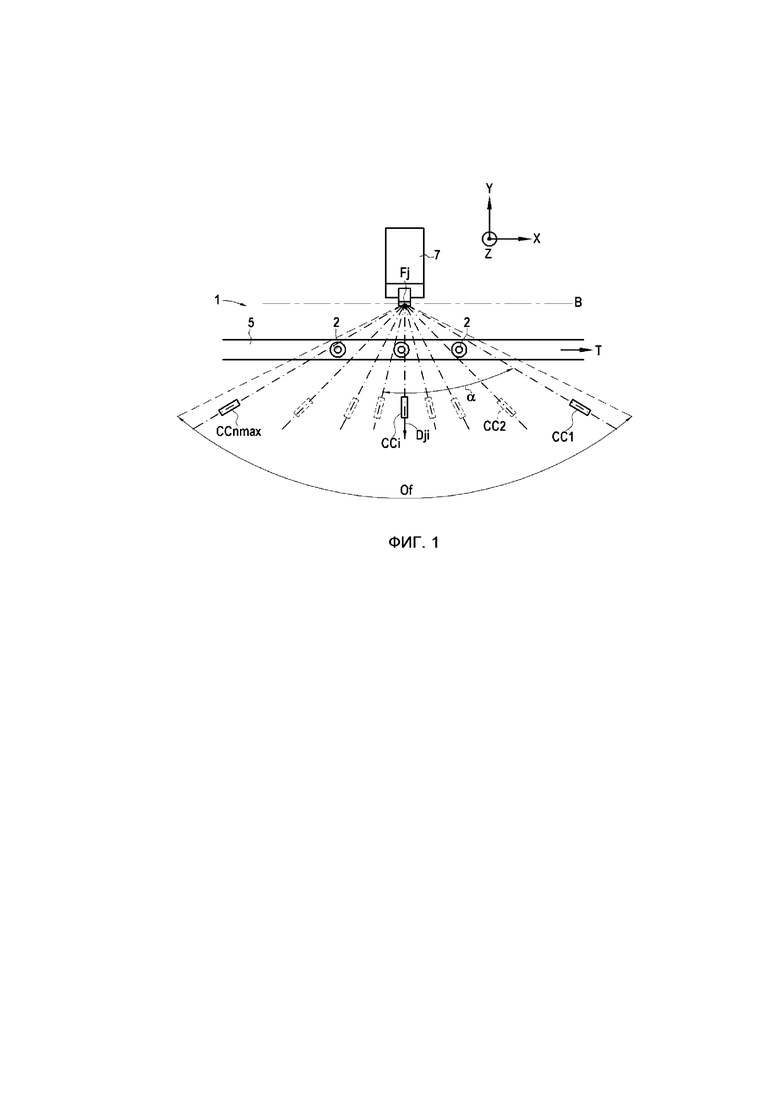
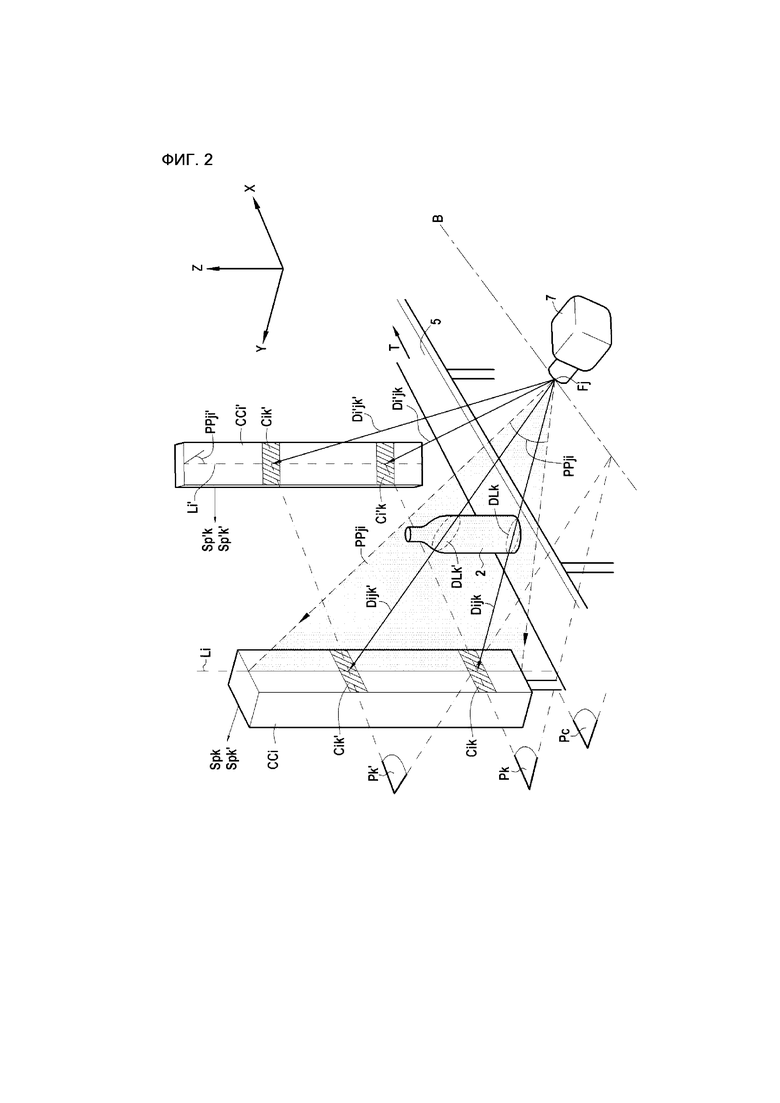
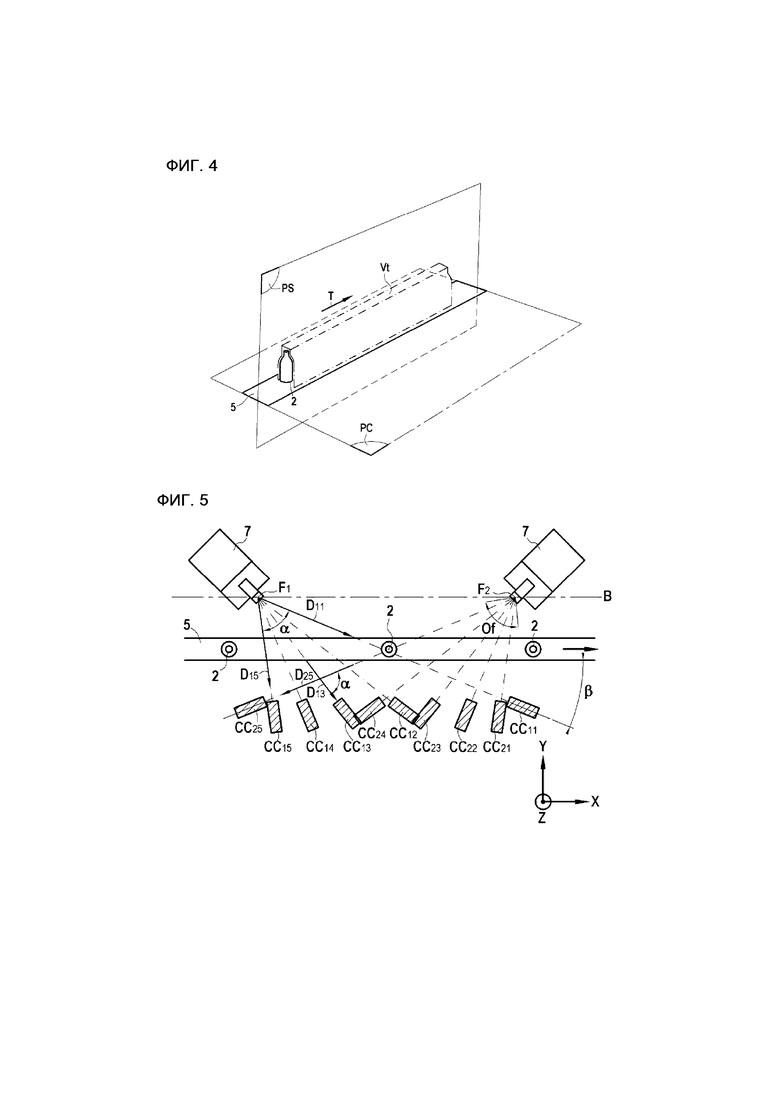
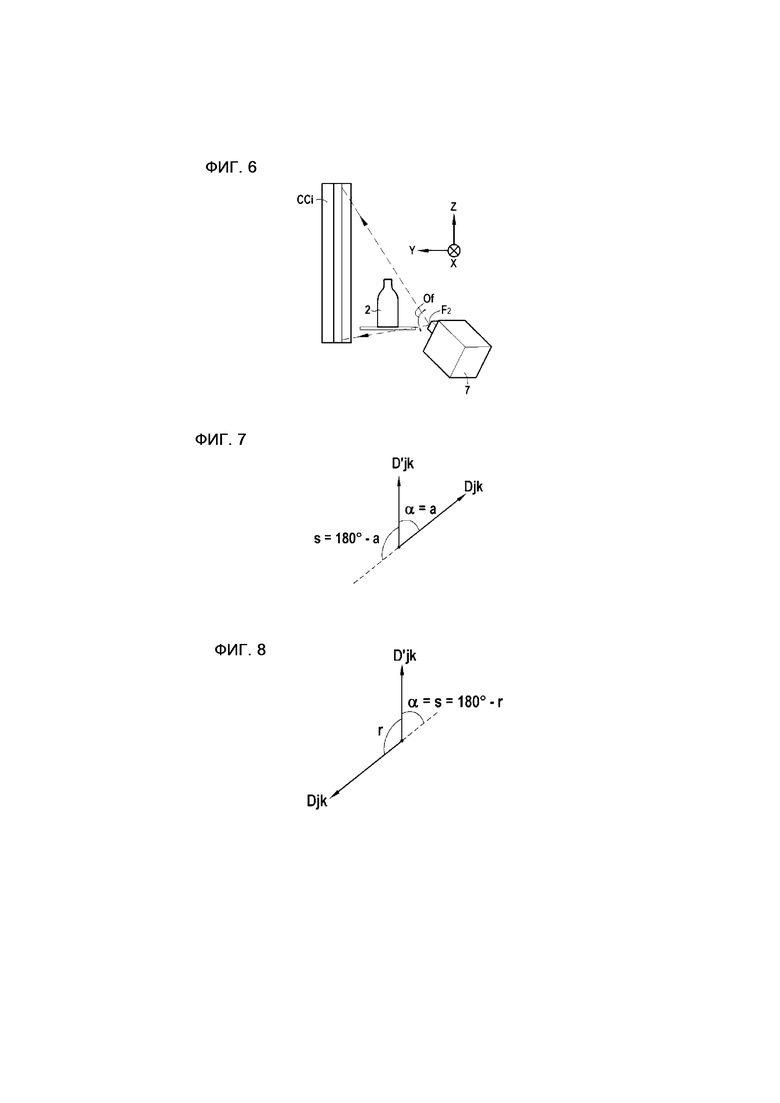
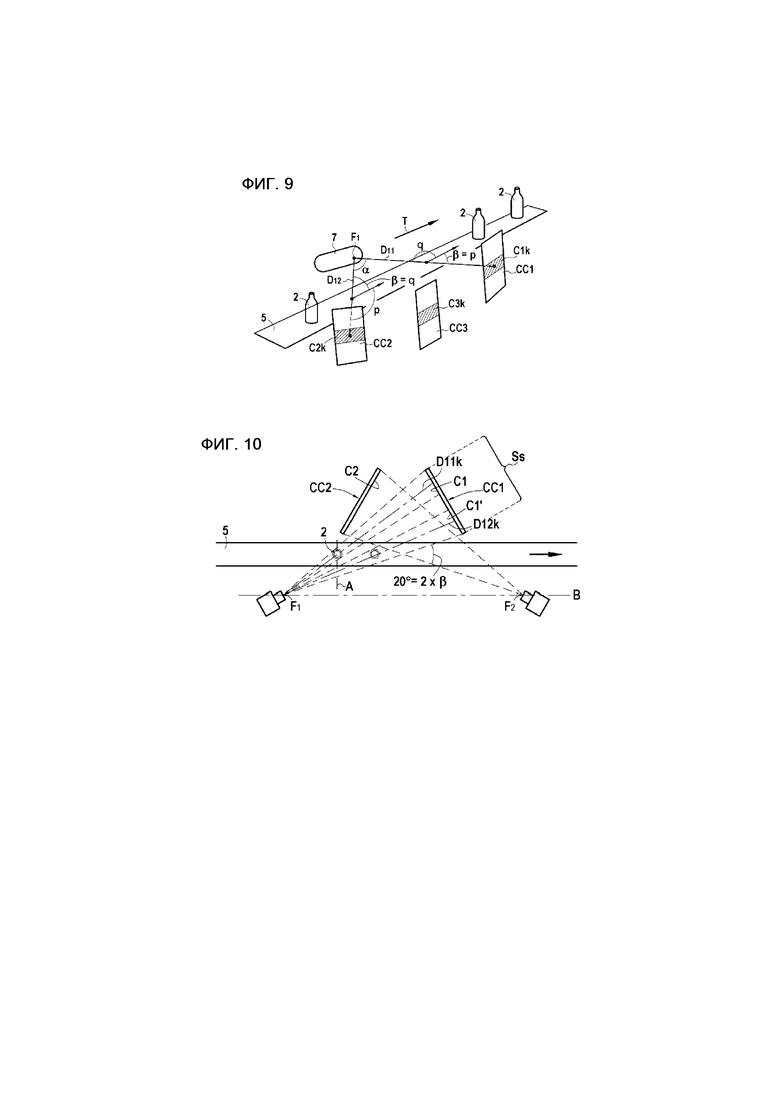
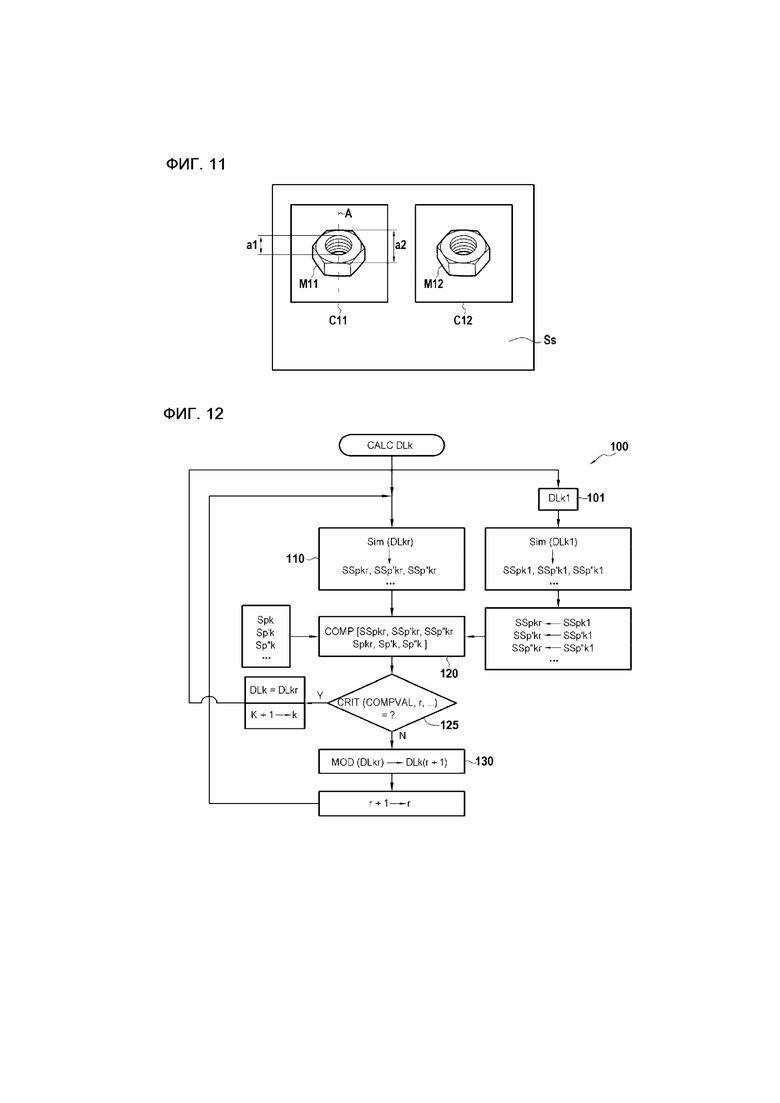
Использование: для измерения линейных размеров изготовленных объектов. Сущность изобретения заключается в том, что размещают по меньшей мере один источник (Fj) рентгеновских лучей на одной и той же базовой прямой (B), параллельной относительно прямолинейной траектории перемещения объектов, и один или нескольких датчиков (Ci) изображений получают, для каждого объекта во время его перемещения, набор одномерных рентгенографических изображений обработки, включающий в себя для некоторого числа (NK) отдельных плоскостей (Pk) сечения, содержащих базовую прямую, некоторое число (NP) указанных изображений, полученных по меньшей мере в трех разных направлениях (Dijk) проекции в плоскости сечения; для каждого объекта и для каждой отдельной плоскости (Pk) сечения определяют, на основании полученных изображений, оконтуривание объекта в рассматриваемой плоскости (Pk) сечения. Технический результат: обеспечение возможности производить точный размерный рентгенографический контроль изготовленных объектов, поступательно перемещающихся на высокой скорости. 2 н. и 31 з.п. ф-лы, 13 ил.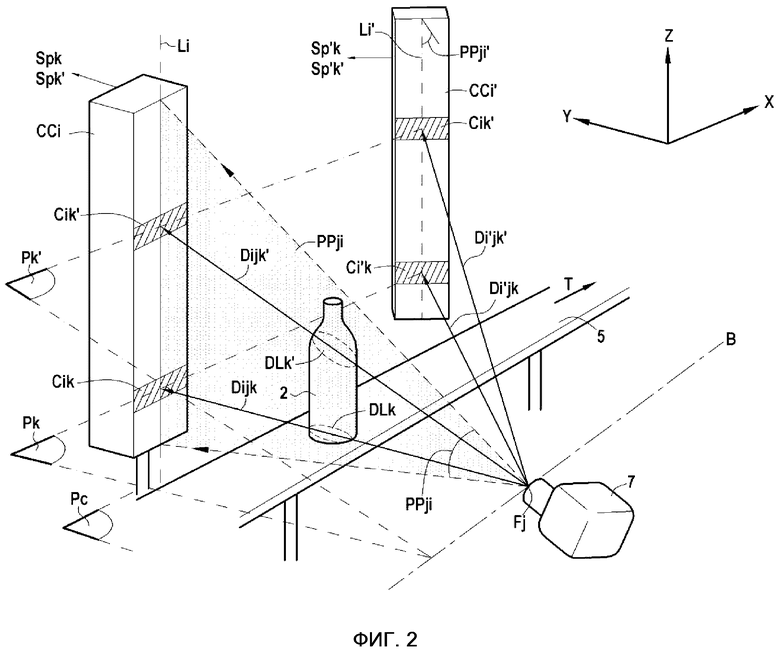
1. Способ автоматического измерения линейных размеров изготовленных объектов (2) серии, содержащий этапы, на которых:
выбирают серию изготовленных объектов (2), в которой каждый из указанных объектов состоит из одной или нескольких отдельных частей, при этом число частей известно, и каждая часть выполнена из материала с известным коэффициентом ослабления, одинаковым в любой точке указанной части объекта;
транспортируют, при помощи устройства транспортировки, объекты в направлении (Т) перемещения вдоль прямолинейной траектории в плоскости (РС) транспортировки, причем указанные объекты образуют объем (Vt) транспортировки во время своего перемещения;
размещают за пределами объема (Vt) транспортировки
по меньшей мере один источник (Fj) рентгеновской трубки, при этом каждый источник (Fj) расположен на одной и той же базовой прямой (B), параллельной направлению (T) перемещения вдоль прямолинейной траектории, и
один или несколько датчиков (Ci) изображений, подвергающихся воздействию рентгеновских лучей и чувствительных к рентгеновским лучам, исходящим из соответствующего источника (Fj), причем рентгеновские лучи проходят по меньшей мере через подлежащую проверке область, производя на каждом датчике изображений рентгенографическую проекцию подлежащей проверке области в направлении (Dji,Djik) проекции;
получают, при помощи датчика(ов) (Ci, Cik) изображений для каждого объекта во время его перемещения, набор одномерных рентгенографических изображений обработки, при этом каждое одномерное рентгенографическое изображение обработки содержит проекцию сечения объекта плоскостью (Pk) сечения, содержащей базовую прямую, при этом указанный набор включает в себя
указанные одномерные рентгенографические изображения обработки для некоторого числа (NK) отдельных плоскостей (Pk) сечения, содержащих базовую прямую;
для каждой отдельной плоскости (Pk) сечения число (NP) указанных одномерных рентгенографических изображений (Spk) обработки подлежащей проверке области, полученных по меньшей мере в трех разных направлениях (Dijk) проекции в плоскости сечения;
для каждого объекта, подлежащего измерению, и для каждой отдельной плоскости (Pk) сечения определяют, при помощи компьютерной системы, оконтуривание объекта в рассматриваемой плоскости (Pk) сечения на основании указанных одномерных рентгенографических изображений (Spk) обработки подлежащей проверке области, полученных в указанных по меньшей мере трех разных направлениях (Dijk) проекции в плоскости сечения, и
для каждого измеряемого объекта определяют, на основании оконтуриваний объекта в каждой отдельной плоскости сечения, по меньшей мере одно измерение линейного размера подлежащей проверке области измеряемого объекта.
2. Способ по п. 1, в котором оконтуривание объекта содержит кривую или набор кривых, которые отображают пересечение граничных поверхностей объекта с плоскостью сечения.
3. Способ по п. 2, в котором кривая или каждая кривая оконтуривания объекта является плоской кривой, моделированной при помощи параметрической системы.
4. Способ по любому из пп. 1-3, в котором на этапе определения оконтуривания объекта в плоскости сечения реализуют алгоритм коррекции кривой, начиная с априорного оконтуривания объекта в плоскости сечения.
5. Способ по любому из пп. 1-4, в котором на этапе определения оконтуривания объекта в плоскости сечения реализуют алгоритм коррекции кривой типа нелинейной регрессии.
6. Способ по любому из пп. 1-5, в котором на этапе определения оконтуривания объекта в плоскости сечения реализуют итеративный алгоритм коррекции кривой, содержащий этапы, на которых:
учитывают априорное оконтуривание объекта в плоскости сечения в качестве вычисленного оконтуривания первого ранга итерации;
затем итеративно
на основании вычисленного оконтуривания данного ранга итерации объекта в плоскости сечения вычисляют число (NP), по меньшей мере равное трем, моделированных одномерных рентгенографических изображений (SSpk) подлежащей проверке области, вычисленных в плоскости сечения в указанных по меньшей мере трех разных направлениях (Dijk) проекции, которые использовались для получения одномерных рентгенографических изображений обработки (Spk) в плоскости сечения,
сравнивают моделированные одномерные рентгенографические изображения (SSpk) с одномерными рентгенографическими изображениями обработки (Spk),
в зависимости от сравнения преобразуют вычисленное оконтуривание в вычисленное оконтуривание более высокого ранга итерации,
пока сравнение моделированных одномерных рентгенографических изображений (SSpk) с одномерными рентгенографическими изображениями обработки (Spk) не достигнет заданного критерия оптимизации.
7. Способ по любому из пп. 1-6, содержащий этапы, на которых:
получают, при помощи датчиков (Ci, Cik) изображений для каждого объекта во время его перемещения, число (NP), по меньшей мере равное трем, двухмерных рентгенографических изображений (Ri) подлежащей проверке области, каждое из которых получено в своем направлении (Dji) проекции,
извлекают из двухмерных рентгенографических изображений (Ri) одномерные рентгенографические изображения обработки (Spk) для формирования набора одномерных рентгенографических изображений.
8. Способ по любому из пп. 1–7, в котором одномерное рентгенографическое изображение обработки (Spk) объекта формируется посредством дискретизации точечного изображения, полученного при помощи точечного датчика (Cik) изображений, в течение времени сканирования, соответствующего времени перемещения объекта между источником и точечным датчиком (Cik) изображений.
9. Способ по любому из пп. 1-8, содержащий для объекта, подлежащего измерению, этап, на котором строят, при помощи компьютерной системы и на основании оконтуриваний объекта в каждой из отдельных плоскостей (Pk) сечения, цифровую трехмерную геометрическую модель подлежащей проверке области, содержащей:
трехмерные точки пространства, каждая из которых принадлежит к граничной поверхности подлежащей проверке области объекта; и/или
по меньшей мере одну трехмерную поверхность подлежащей проверке области.
10. Способ по п. 9, в котором на этапе определения для объекта, подлежащего измерению, на основании оконтуриваний объекта в каждой отдельной плоскости сечения, по меньшей мере одного измерения линейного размера подлежащей проверке области объекта, подлежащего измерению, определяют расстояние между по меньшей мере двумя трехмерными точками цифровой трехмерной геометрической модели подлежащей проверке области.
11. Способ по любому из пп. 1-10, содержащий этап, на котором вводят в компьютерную систему для каждой плоскости сечения априорное оконтуривание объекта в плоскости сечения.
12. Способ по п. 11, в котором априорные оконтуривания получены:
при помощи цифровой модели компьютерного проектирования объектов серии; и/или
на основании измерения одного или нескольких объектов одной серии при помощи измерительного устройства; и/или
на основании вводимых значений, и/или выполненных чертежей, и/или форм, выбранных оператором на интерфейсе «человек-машина» компьютерной системы.
13. Способ по любому из пп. 1-12, содержащий этап, на котором вводят в компьютерную систему априорную трехмерную геометрическую модель подлежащей проверке области серии, которая получена при помощи:
цифровой модели компьютерного проектирования объектов серии; и/или
цифровой геометрической модели, полученной на основании измерения одного или нескольких объектов одной серии при помощи измерительного устройства; и/или
цифровой геометрической модели, созданной компьютерной системой на основании вводимых значений, и/или выполненных чертежей, и/или форм, выбранных оператором на интерфейсе «человек-машина» компьютерной системы.
14. Способ по любому из пп. 1-13, содержащий этап, на котором размещают источник(и) в плоскости (РС) транспортировки.
15. Способ по любому из пп. 1-14, содержащий этап, на которому получают, при помощи датчика(ов) (Ci, Cik) изображений, для объекта серии во время его перемещения и для каждой рассматриваемой плоскости (Pk) сечения объекта, по меньшей мере два одномерных рентгенографических изображения обработки подлежащей проверке области, соответствующие направлениям (Djik) проекции, образующим в рассматриваемой плоскости сечения эффективный угол (α), превышающий или равный 45° и меньший или равный 90°, предпочтительно превышающий или равный 60° и меньший или равный 90°.
16. Способ по любому из пп. 1-15, содержащий этап, на котором получают, при помощи датчика(ов) (Ci, Cik) изображений, для объекта серии во время его перемещения и для каждой рассматриваемой плоскости (Pk) сечения объекта, по меньшей мере одно рентгенографическое изображение подлежащей проверке области, соответствующее направлению (Djik) проекции, имеющему при приведении в проекцию в плоскости (РС) транспортировки угол раскрытия (β) с направлением (Т) перемещения, составляющий от 10° до 60°.
17. Способ по любому из пп. 1-16, содержащий этап, на котором не получают, при помощи датчика(ов) (Ci, Cik) изображений для объекта серии во время его перемещения, ни одного рентгенографического изображения подлежащей проверке области, соответствующего направлению (Dji, Djik) проекции, имеющему угол раскрытия (β) с направлением (Т) перемещения меньше 10°.
18. Способ по любому из пп. 1-17, содержащий этап, на котором реализуют и получают рентгенографические проекции подлежащей проверке области объекта так, чтобы рентгеновские лучи, исходящие от источника(ов) и достигающие датчиков (Ci) изображений, не проходили через другой объект.
19. Способ по любому из пп. 1-18, содержащий, для каждого объекта серии во время его перемещения и для каждой плоскости сечения, этап, на котором получают одномерные рентгенографические изображения обработки, полученные при помощи от трех до сорока рентгенографических проекций подлежащей проверке области с разными направлениями проекции, предпочтительно полученные при помощи от четырех до пятнадцати рентгенографических проекций подлежащей проверке области с разными направлениями проекции.
20. Способ по любому из пп. 1-19, в котором:
датчики (Ci) изображений образуют часть по меньшей мере трех физических детекторных компонентов (CCi), каждый из который является компонентом линейного типа и содержит линейный массив элементов, чувствительных к рентгеновским лучам и распределенных вдоль опорной прямой (Li), которая образует вместе с источником (Fj) плоскость (PPji) проекции, содержащую направление (Dji,Djik) проекции, причем датчики изображений расположены так, что:
по меньшей мере m чувствительных элементов каждого из физических детекторных компонентов принимают рентгенографическую проекцию подлежащей проверке области при помощи исходящего из источника (Fj) пучка рентгеновских лучей;
плоскости (PPji) проекции для разных физических детекторных компонентов различаются между собой и не параллельны плоскости (PC) транспортировки;
при помощи каждого из указанных по меньшей мере трех линейных физических детекторных компонентов (Ci) при каждом инкрементальном перемещении каждого объекта вдоль траектории (T) получают одномерные рентгенографические изображения подлежащей проверке области в количестве, выбранном так, чтобы для каждого объекта вся подлежащая проверке область была полностью представлена в наборе одномерных рентгенографических изображений;
для каждого объекта анализируют указанные по меньшей мере три набора одномерных рентгенографических изображений проверяемой области.
21. Установка для автоматического измерения линейных размеров по меньшей мере одной подлежащей проверке области изготовленных объектов серии, при этом установка содержит:
устройство транспортировки объектов в направлении, материально представленном вектором (Т) перемещения, вдоль прямолинейной траектории в плоскости (РС) транспортировки, при этом объекты проходят через объем (Vt) транспортировки, расположенный в направлении (T) перемещения;
по меньшей мере один источник (Fj) рентгеновской трубки, который находится за пределами проходимого объема (Vt) и выполнен с возможностью создания направленного расходящегося пучка рентгеновских лучей для прохождения по меньшей мере через одну подлежащую проверке область объекта, при этом каждый источник расположен на одной и той же базовой прямой, параллельной направлению (T) перемещения вдоль прямолинейной траектории;
датчики (Ci, Cik) изображений, находящиеся за пределами объема (Vt) транспортировки, для приема рентгеновских лучей, исходящих из соответствующего источника (Fj), при этом источник(и) (Fj) и датчики (Ci) изображений расположены так, чтобы каждый датчик изображений принимал рентгенографическую проекцию подлежащей проверке области при помощи лучей, исходящих из источника (Fj), когда объект пересекает указанный луч, при этом направления проекции указанных рентгенографических проекций отличаются друг от друга;
систему получения, соединенную с датчиками (Ci, Cik) изображений так, чтобы для каждого объекта во время его перемещения получать набор одномерных рентгенографических изображений обработки, при этом набор содержит:
указанные одномерные рентгенографические изображения обработки для некоторого числа (NK) отдельных плоскостей (Pk) сечений, содержащих базовую прямую;
для каждой отдельной плоскости (Pk) сечения некоторое число (NP) указанных одномерных рентгенографических изображений обработки (Spk) подлежащей проверке области, полученных по меньшей мере в трех разных направлениях (Dijk) проекции в плоскости сечения;
компьютерную систему, выполненную с возможностью:
для каждой отдельной плоскости (Pk) сечения определять оконтуривание объекта в рассматриваемой плоскости (Pk) сечения на основании указанных одномерных рентгенографических изображений обработки (Spk), полученных в указанных по меньшей мере трех разных направлениях (Dijk) проекции в плоскости сечения.
22. Установка по п. 21, содержащая по меньшей мере два источника (F1,F2) рентгеновских лучей, расположенных раздельно в двух разных положениях на одной и той же базовой прямой, параллельной направлению (T) перемещения вдоль прямолинейной траектории, и по меньшей мере три датчика (Ci) изображений, чувствительные к рентгеновским лучам и расположенные так, чтобы:
каждый источник излучал свой пучок по меньшей мере через подлежащую проверке область, чтобы достигать по меньшей мере одного соответствующего датчика (Ci, Cik);
каждый датчик (Ci) был связан с источником и принимал выходящие из указанного источника рентгеновские лучи после прохождения через подлежащую проверке область.
23. Установка по п. 21 или 22, содержащая по меньшей мере один источник, из которого исходит расходящийся пучок рентгеновских лучей с апертурой, превышающей или равной 90°, или по меньшей мере два отдельных источника, из которых исходят расходящиеся пучки рентгеновских лучей, сумма апертур которых превышает или равна 90°.
24. Установка по любому из пп. 21-23, содержащая по меньшей мере один источник, расположенный в плоскости (РС) транспортировки.
25. Установка по п. 22, возможно, в сочетании с любым из пп. 23 и 24, в которой по меньшей мере один источник и два датчика изображений расположены так, чтобы направления проекции подлежащей проверки области имели между собой полезный угол (α), превышающий или равный 45° и меньший или равный 90°, предпочтительно превышающий или равный 60° и меньший или равный 90°.
26. Установка по любому из пп. 21-25, в которой по меньшей мере один источник и один датчик (Ci) изображений расположены так, чтобы, когда объект пересекает поле датчиков, направление (Dji,Djik) проекции подлежащей проверке области на датчик (Cik,Ci) изображений образовало угол раскрытия (β) с направлением (T) перемещения, составляющий от 10° до 60°.
27. Установка по любому из пп. 21-26, в котором, когда ни один источник (Fj) трубки рентгеновских лучей не находится в проходимом объеме (Vt) и ни один датчик (Ci) изображений не находится в объеме (Vt) транспортировки, направление (Dji,Djik) проекции проверяемой области на датчик (Ci) изображений никогда не образует угол раскрытия (β) с направлением (T) перемещения меньше 10°.
28. Установка по любому из пп. 21-27, в которой датчики (Ci) изображений и источники (Fj) расположены так, чтобы рентгеновские лучи, исходящие из источника или источников и достигающие датчиков (Cik,Ci) изображений и проходящие через область объекта, не проходили одновременно через другой объект.
29. Установка по любому из пп. 21-28, содержащая от одного до четырех источников (Fj), принадлежащих к одной или нескольким рентгеновским трубкам.
30. Установка по любому из пп. 21-29, в которой число и расположение датчиков (Cik) изображений и соответствующих источников таковы, что для каждого объекта серии во время его перемещения рентгенографические проекции подлежащей проверке области на датчики изображений имеют от трех до сорока разных направлений проекции, предпочтительно от четырех до пятнадцати разных направлений проекции.
31. Установка по любому из пп. 21-30, в которой датчики (Ci) изображений являются частью физических детекторных компонентов (CCi) линейного типа, каждый из которых содержит линейный массив элементов, чувствительных к рентгеновским лучам и распределенных вдоль опорной прямой (Li), которая образует с соответствующим источником (Fj) плоскость (PPji) проекции, содержащую направление (Dji,Djik) проекции, причем датчики изображений расположены так, что:
по меньшей мере m чувствительных элементов каждого из физических детекторных компонентов (CCi) принимают рентгенографическую проекцию проверяемой области при помощи пучка рентгеновских лучей, исходящего из соответствующего источника (Fj);
плоскости (PPji) проекции для разных датчиков различаются между собой и не параллельны плоскости (РС) транспортировки.
32. Установка по п. 31, в которой опорные прямые (Li) по меньшей мере трех линейных датчиков (Ci) изображений параллельны друг другу.
33. Установка по п. 31 или 32, в которой опорные прямые (Li) по меньшей мере трех линейных физических детекторных компонентов (CCi) ортогональны к плоскости (РС) транспортировки.
| JP 2007147661 A, 14.06.2007 | |||
| WO 2018014138 A1, 25.01.2018 | |||
| JP 2005338011 A, 08.12.2005 | |||
| КУХОННАЯ ПОСУДА С ДАТЧИКОМ ИЗМЕРЕНИЯ ЕЕ ТЕМПЕРАТУРЫ | 1999 |
|
RU2220638C2 |
| Гидравлический сервомеханизм | 1985 |
|
SU1280206A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЧАСТИЦ И РАБОЧИХ ХАРАКТЕРИСТИК ПРОЦЕССОРА В СИСТЕМЕ ОБРАБОТКИ КАМЕННОГО УГЛЯ И МИНЕРАЛОВ | 2004 |
|
RU2376580C2 |
