Изобретение относится к области измерительной техники и гидроакустики и может быть использовано судейской бригадой для слежения за ходом соревнований подводных пловцов и других самодвижущихся подводных объектов в натурных и искусственных водоемах.
Известен способ аналогичного назначения, пригодный для решения поставленной в заявке задачи, заключающийся в том, что акустический приемник располагают напротив финишной прямой вне трассы следования пловцов и регистрируют времена пересечения пловцами финишной прямой с дальнейшей обработкой выходных сигналов акустического приемника электронным блоком обработки информации (БОИ) и компьютером. /Патент США №4752764, кл. 340-323R (G 03 B 23/00), 1988/.
Данный способ принят за прототип. В прототипе акустический приемник и акустический тональный излучатель установлены напротив друг друга вдоль финишной прямой. Это позволяет определить время пересечения пловцом финишной прямой.
Кроме того, в ходе соревнований применяется видеокамера, позволяющая следить за траекторией движения соревнующихся пловцов (например, их поперечных перемещений).
Недостатком прототипа являются погрешности определения времени пересечения пловцами финишной прямой, связанной с конечными размерами пловца и погрешности визуального определения траектории и скорости движения подводного объекта на телевизионном экране.
Кроме того, на больших расстояниях телевизионная камера не воспринимает изображения пловцов в видимом свете ввиду большого поглощения света водой, что затрудняет проведение временного и пространственного мониторинга поведения пловцов.
Техническим результатом, появляющимся от внедрения изобретения, является повышение точности измерений времени пересечения пловцами финишной прямой и осуществление временного и пространственного мониторингов поведения пловцов при проведении соревнований на больших глубинах и больших расстояниях между стартом и финишем трассы соревнований.
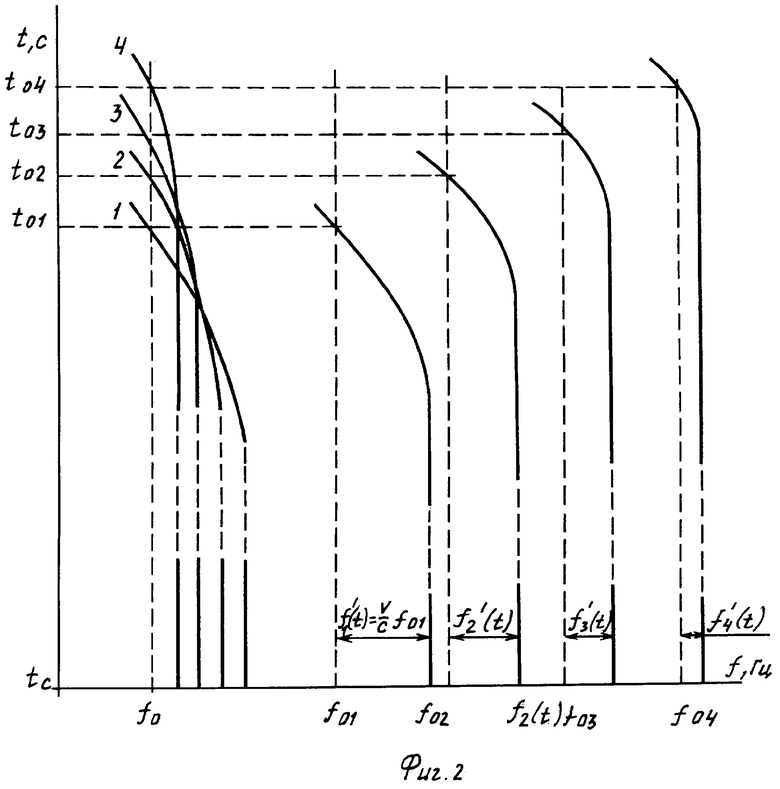
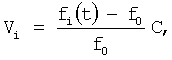
Данный технический результат в первом варианте способа достигают за счет того, что в известном способе слежения за ходом соревнований подводных пловцов с помощью акустического тонального излучателя и акустического приемника, заключающемся в том, что акустический приемник (АП) располагают напротив финишной прямой (ФП) вне трассы следования пловцов и регистрируют времена пересечения пловцами ФП с дальнейшей обработкой выходных сигналов АП электронным БОИ и компьютере, акустический излучатель (АИ) тональный на частоте f0 устанавливают на каждом из n пловцов, при этом АИ и АП выполнены ненаправленными и с помощью АП, электронного БОИ и компьютера прослеживают за изменениями доплеровских частот fi(t) во времени t на тональной частотной составляющей f0 и для времени t много меньших времен t0i пересечения пловцами финишной прямой, в которые с точностью до погрешностей измерений наблюдается постоянство доплеровской частоты fi(t), определяют скорости Vi пловца из математических зависимостей
где С - скорость звука в воде, i=1, 2... n, при этом времена t0i пересечения пловцами ФП определяют в моменты времени, когда значения мгновенных доплеровских частот  , (Гц) равно нулю, а траверзное расстояние d0i между АП и каждым из финиширующих пловцов определяют исходя из математических соотношений
, (Гц) равно нулю, а траверзное расстояние d0i между АП и каждым из финиширующих пловцов определяют исходя из математических соотношений

Во втором варианте способа для той же совокупности существенных признаков известного способа, описанной выше, тональный АИ на различные частоты f0i устанавливают на каждом из пловцов, причем на каждом из пловцов устанавливают тональный АИ своей частоты, а АИ и АП выполняют ненаправленными и с помощью АП, электронного БОИ и компьютера прослеживают за изменением доплеровских частот fi(t), во времени t на тональных составляющих f0i и для времен t, много меньших времен t0i, (с) пересечения пловцами ФП, в которые с точностью до погрешностей измерений наблюдается постоянство значений доплеровских частот, определяют скорости Vi каждого пловца из математических зависимостей
при этом времена t0i пересечения пловцами ФП определяют в моменты времени, когда значения мгновенных доплеровских частот равно нулю, а траверзные расстояния d0i между АП и каждым финиширующим пловцом определяют исходя из математических зависимостей
Сущность данного способа заключается в том, что при равномерном прямолинейном движении тонального АИ параметры его движения могут быть записаны выражениями (2), (4).
То есть зависимость наблюдаемой доплеровской частоты fi(t) от времени t является функцией, содержащей четыре параметра f0i, t0i, d0i, Vi.
Если значения функции fi(t) каким-либо образом оценены для ряда временных отсчетов tк, (к=1, 2, 3...), то оценки параметров траектории могут быть получены на основе решения задач нелинейной регрессии методом наименьших квадратов. /Д.Дж.Уайлд "Методы поиска экстремума". М.: Наука, 1967, с.17-27/.
Модель регрессии задается уравнениями (2), (4). Функционал метода наименьших квадратов имеет вид

где Wк - весовая функция;  - измеренные значения частот. /Ф.Гилл и др. "Практическая оптимизация". М.: Мир, 1985, с.104-110/.
- измеренные значения частот. /Ф.Гилл и др. "Практическая оптимизация". М.: Мир, 1985, с.104-110/.
Из параметрических уравнений (2), (4) следует, что для частных случаев, когда t≪t0i fi(t)≅const с точностью до погрешностей измерений, а для случая t=t01 fi(t)=f0i. Это дает возможность по формуле (1) определить скорость пловца Vi, а по формуле (2) или (4) траверзное расстояние между АП и пловцом на ФП.
В общем случае для любого времени t по уравнениям (2), (4) можно определить пространственное положение пловца, измерив параметры t0i, d0i и Vi.
Варианты способа различаются только тем, что слежение за доплеровской частотой fi(t) ведется относительно одной тональной составляющей f0 для всех пловцов количеством n (первый вариант) или относительно различных тональных составляющих f0i (i=1, 2... n), (второй вариант).
Первый вариант проще, но фиксируемые в нем частотно-временные следы (ЧВС) пловцов пересекаются для ряда значений t друг с другом, что может внести неопределенность в интерпретацию результатов соревнований.
Второй вариант способа сложнее, поскольку требует тональные ГИ на различные частоты f0i, но позволяет получить непересекающиеся ЧВС и однозначную интерпретацию результатов соревнований для любых времен t.
Изобретение поясняется чертежами.
На фиг.1 представлена схема реализации способа для обоих вариантов; на фиг.2 - ЧВС, получаемых для соревнующихся пловцов по первому варианту (слева) и второму варианту способа.
На водной акватории (не обозначена) условно размещено четыре трассы, по которым могут двигаться четыре подводных пловца 1, 2, 3, 4. То есть в данном случае i=4.
На финише (на фиг.1 буква Ф) размещен ГП5, подключенный к БОИ 6 с компьютером (на чертеже не обозначен).
На каждом пловце, например на его шлеме или маске, размещается тональный ГИ на одну или различные частоты (на чертеже ГИ не показаны).
Если тональная составляющая f0 одна для всех пловцов, то при их движении реализуется ЧВС, изображенные слева на фиг.2 (под номерами пловцов 1, 2, 3, 4). Для различных тональных составляющих f01, f02, f03, f04 ЧВС изображены на фиг.2, справа. Причем на фиг.2 представлен случай, когда пловцы проходят старт (на фиг.1 буква С), предварительно разогнавшись до скорости Vi.
По общему характеру ЧВС можно определить не только времена пересечения каждым пловцом финишной прямой, но и знать их скорости и отклонения от прямолинейного движения (от своей трассы следования). Причем для получения результатов соревнований обрабатываются не импульсные сигналы, как в прототипе, а частотные, обладающие по сравнению с первыми узкой полосой частот. Кроме того, для пространственно временного мониторинга хода соревнований используется только акустический канал, а не оптический, как в прототипе. Это позволяет проводить соревнования пловцов на значительных глубинах и длинных трассах без потери информации о параметрах движения пловцов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕДЕНИЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО МОНИТОРИНГА СОРЕВНОВАНИЙ САМОДВИЖУЩИХСЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284546C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2297012C2 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ В УСЛОВИЯХ ПЛОХОЙ ВИДИМОСТИ | 2005 |
|
RU2290660C2 |
| ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2284543C2 |
| СПОСОБ КОНТРОЛЯ ДОРОЖНО-ПАТРУЛЬНОЙ СЛУЖБОЙ ДВИЖЕНИЯ НА ОПАСНОМ УЧАСТКЕ СКОРОСТНОЙ МАГИСТРАЛИ | 2005 |
|
RU2287859C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2395815C1 |
| Доплеровский способ оценки технических параметров подводного объекта на гидроакустическом полигоне | 2017 |
|
RU2649059C1 |
| СПОСОБ ОЦЕНКИ ДОПЛЕРОВСКОГО СМЕЩЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СЛОЖНОГО СИГНАЛА | 2014 |
|
RU2565237C1 |
| Гидроакустический доплеровский способ оценки технических параметров отдельных участков корпуса подводного объекта на полигоне | 2017 |
|
RU2650722C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2557666C2 |
Изобретение относится к области измерительной техники и гидроакустики и может быть использовано судейской бригадой для слежения за ходом соревнований. Технический результат заключается в повышении точности измерений времени пересечения пловцами финишной прямой. Способ заключается в том, что акустический приемник располагают напротив финишной прямой вне трассы следования пловцов и регистрируют время пересечения пловцами финишной прямой с дальнейшей обработкой выходных сигналов акустического приемника электронным блоком обработки информации и компьютером, причем акустический тональный излучатель на частоте f0 устанавливают на каждом из n пловцов, при этом акустические тональные излучатели и акустический приемник выполнены ненаправленными и с помощью акустического приемника, электронного блока обработки информации и компьютера прослеживают за изменениями доплеровских частот fi(t) во времени t на тональной частотной составляющей f0 и для времен t много меньших времен t0i пересечения пловцами финишной прямой, в которые с точностью до погрешностей измерений наблюдается постоянство значений доплеровской частоты fi(t), определяют скорости Vi каждого пловца, когда значения мгновенных доплеровских частот 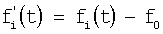 равно нулю, и определяют траверзное расстояние d0i между акустическим приемником и каждым из финиширующих пловцов. 2 н.п. ф-лы, 2 ил.
равно нулю, и определяют траверзное расстояние d0i между акустическим приемником и каждым из финиширующих пловцов. 2 н.п. ф-лы, 2 ил.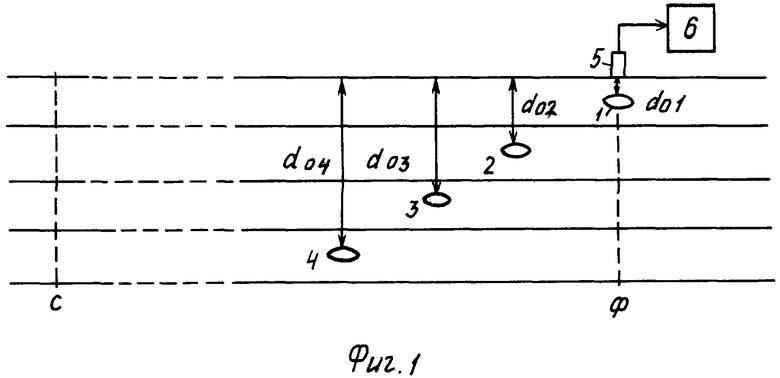
где С - скорость звука в воде, i=1, 2,..., n, при этом время t0i пересечения пловцами финишной прямой определяют в моменты времени, когда значения мгновенных доплеровских частот  равно нулю, а траверзное расстояние d0i между акустическим приемником и каждым из финиширующих пловцов определяют исходя из математических соотношений
равно нулю, а траверзное расстояние d0i между акустическим приемником и каждым из финиширующих пловцов определяют исходя из математических соотношений
где i=1, 2,..., n, С - скорость звука в воде, при этом времена t0i, пересечения пловцами финишной прямой определяют в моменты времени, когда значения мгновенных доплеровских частот  равно нулю, а траверзные расстояния d0i между акустическим приемником и каждым из финиширующих пловцов определяют исходя из математических соотношений:
равно нулю, а траверзные расстояния d0i между акустическим приемником и каждым из финиширующих пловцов определяют исходя из математических соотношений:
| US 4752764, 21.06.1998 | |||
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ СКОРОСТИ ДВИЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154287C1 |
| US 5463598 А, 31.10.1995 | |||
| ИНДИКАТОР КОНТРОЛЯ СТЕПЕНИ СУХОСТИ НАСЫЩЕННОГО ВОДЯНОГО ПАРА | 2007 |
|
RU2376585C2 |
| JP 2000111375, 18.04.2000 | |||
| JP 2002277481, 25.09.2002. | |||

