Изобретение относится к контрольно-измерительной технике и может быть использовано при проведении соревнований различных подводных объектов, например аквалангистов на морской акватории.
Известен способ аналогичного назначения, принятый за прототип /Патент США №4752764, кл. 340/323R (G 03 B 23/00, Н 04 №7/18), 1988/.
Согласно прототипу на финишной прямой вне трассы следования подводных объектов (ПО) устанавливают финишный гидроакустический приемник (ГП) и обрабатывают выходной сигнал ГП на компьютере.
Для проведения пространственно-временного мониторинга имеется телевизионная камера, что позволяет на телевизионном экране наблюдать за ходом соревнований ПО в любой момент времени.
Недостатком прототипа является ограниченность его применения случаями небольших морских акваторий для соревнований ПО, поскольку световые лучи плохо пропускаются водой.
Техническим результатом, получаемым от использования изобретения, является распространение известного способа на случай больших морских акваторий, не пропускающих световых лучей.
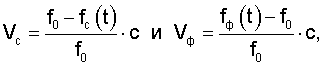
Данный технический результат достигают за счет того, что в известном способе проведения пространственно-временного мониторинга соревнований самодвижущихся ПО в натурном водоеме, заключающемся в расположении на финишной прямой вне трассы следования ПО финишного ГП и обработке выходных сигналов ГП на компьютере, на стартовой прямой вне трассы следования ПО дополнительно располагают стартовый ГП, а на каждом из ПО устанавливают тональный гидроакустический излучатель (ГИ) с частотой f0, (Гц), затем стартовым и финишным ГП принимают доплеровские частоты fc(t), (Гц), и fф(t), (Гц), соответствующие каждому из двигающихся ПО, и на временах tc ≪t, (с) и t≪tф, (с), когда значения соответствующих доплеровских частот fc(t) и fф(t) с точностью до погрешностей измерений постоянны, определяют скорости Vc,.(м/с) и Vф, (м/с) движения каждого из ПО по математическим соотношениям:
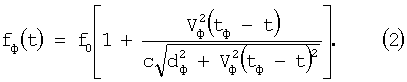
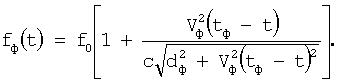
где t - текущее время; с, (м/с) - скорость звука в воде, затем фиксируют времена tф финиширования ПО в момент равенства нулю мгновенных доплеровских частот (fф(t)-f0) и определяют на компьютере траверзные расстояния dф, (м) между каждым ПО и финишным ГП, исходя из математической зависимости:
Кроме того, дополнительно определяют мгновенную разностную доплеровскую частоту fфс(t), (c)=fф(t)-fc(t) для каждого из движущихся ПО и уточняют на компьютере значения кинетических параметров, исходя из математического соотношения:
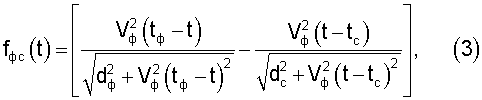
где dc, (м) - траверзные дистанции между ПО и стартовым ГП (в момент старта). Мгновенная разностная доплеровская частота fфс(t) определяется в середине трассы.
Мгновенную разностную доплеровскую частоту определяют путем объединения стартового и финишного ГП в интерферометр.
Существо способа заключается в том, что при равномерном прямолинейном движении тонального ГИ частотой f0 неподвижный финишный ГП регистрирует доплеровскую частоту fф(t), зависящую от четырех параметров Vф, tф, dф и с, взаимосвязанных параметрическим уравнением (2).
При этом если значения функции fф(t) каким-либо образом оценены для ряда временных отсчетов ti, (с), то оценки параметров траектории могут быть получены на основе решения задачи нелинейной регрессии методом наименьших квадратов [Д.Дж.Уайлд "Методы поиска экстремума", М., "Наука", 1967, с.17-27].
Модель регрессии задается уравнением (2). Функционал метода наименьших квадратов имеет вид:

где w2 - весовая функция,  , (Гц) - измеренные значения частот. [Ф.Гилл и др. "Практическая оптимизация", М., "Мир", 1985, с.104-110].
, (Гц) - измеренные значения частот. [Ф.Гилл и др. "Практическая оптимизация", М., "Мир", 1985, с.104-110].
Для параметрического уравнения (2) интересны два частных случая.
Когда t≪tф из уравнения (2) можно получить уравнение (1), стоящее справа, и определить скорость движения ПО.
Когда t=tф уравнение (2) позволяет определить траверзные дистанции ПО.
Аналогичные выкладки можно отнести и к стартовому ГП и получить уравнение, аналогичное уравнению (2) для него.
Если стартовый и финишный ГП объединить в интерферометр, то на выходе последнего получим мгновенную разностную доплеровскую частоту, связанную с кинематическими параметрами движущегося ПО уравнением (3).
Таким образом, по параметрическим уравнениям (2), (3) с помощью компьютера можно определить не только время финиширования каждого ПО, но и кинематические характеристики последних за все время их движения, т.е. осуществить пространственно-временной мониторинг движения ПО.
В периоды времени, близкие к tc, слежение за ПО ведет стартовый ГП; во времена, близкие к tф, - финишный ГП.
Когда ПО находится на середине дистанции слежение за ним ведется обоими ГП, объединенными в интерферометр. В последнем случае зависимость мгновенной разностной доплеровской частоты от времени носит более крутой характер по сравнению с функциями fф(t) и fc(t). Что позволяет более точно определить кинематические характеристики ПО на середине дистанции между стартом и финишем.
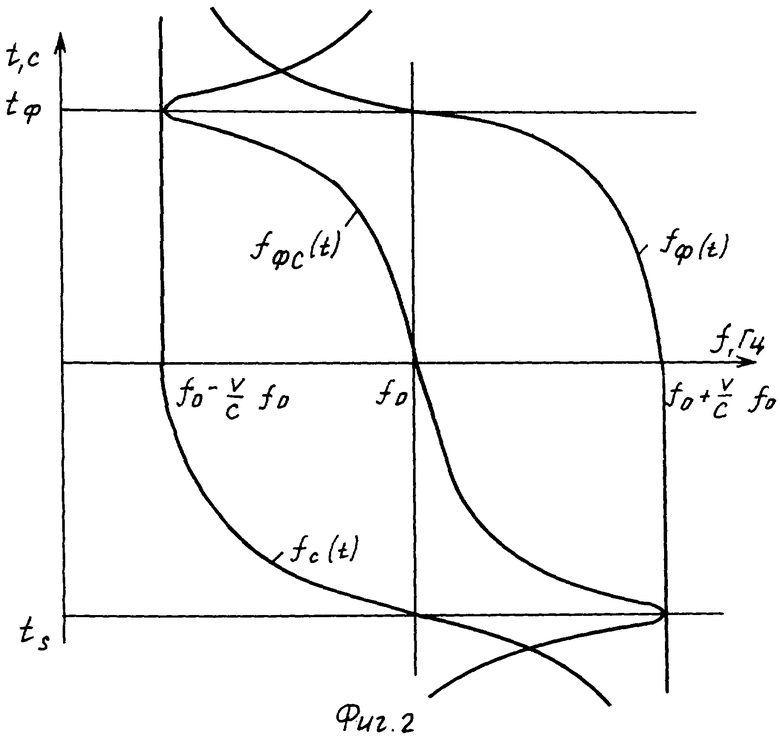
Изобретение поясняется чертежами. На фиг.1 представлена схема реализации способа; на фиг.2 - частотно-временные следы для одного из движущихся ПО, полученные на мониторе компьютера.
На фиг.1 представлен случай, когда предварительно разогнавшиеся ПО1 проходят в момент времени tc стартовую линию 2 со скоростью Vc и затем двигаются по различным дорожкам подводной трассы 3.
Тональные ГИ на чертеже не показаны. ГИ целесообразно выбрать дипольного типа, чтобы их характеристики направленности были в равной степени ориентированы к стартовому и финишному ГП4 и ГП5.
Стартовый ГП4 позволяет определить время tc по нулевому сигналу мгновенной доплеровской частоты (fc(t)-f0) (фиг.2).
Финишный ГП5 в эти времена позволяет по формуле (1) определить скорость ПО1.
Когда ПО1 достигает середины трассы (или близок от нее) ГП4 и ГП5 объединяются в интерферометр с помощью электронной аппаратуры 6 в гидроакустическом центре мониторинга (ГЦМ). (На чертеже ГЦМ не показан). В это время проводится пространственно-временной мониторинг середины трассы 3.
Во времена, близкие к tф, проводят мониторинг с помощью финишного ГП5, которым фиксируют время пересечения ПО1 финишной прямой 7 в момент равенства нулю мгновенной доплеровской частоты fф(t)-f0 (фиг.2). А также определяют с помощью компьютера значение траверзной дистанции dф, используя алгоритм (2). По значениям dф определяют номер дорожки, по которой двигался ПО1 по трассе, а также степень поперечного отклонения движения ПО при движении по дорожке. Одновременно с помощью стартового ГП4 определяют скорость Vф финиширования ПО1.
Таким образом, данным способом проводится пространственно-временной мониторинг соревнований вдоль всей трассы следования ПО1 на значительных морских акваториях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕЖЕНИЯ ЗА ХОДОМ СОРЕВНОВАНИЙ ПОДВОДНЫХ ПЛОВЦОВ (ВАРИАНТЫ) | 2004 |
|
RU2284547C2 |
| ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2284543C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2297012C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284484C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСТОЯННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ В ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С КВАЗИСЛУЧАЙНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2491572C1 |
| Доплеровский способ оценки технических параметров подводного объекта на гидроакустическом полигоне | 2017 |
|
RU2649059C1 |
| Гидроакустический доплеровский способ оценки технических параметров отдельных участков корпуса подводного объекта на полигоне | 2017 |
|
RU2650722C1 |
| Способ передачи дискретных сообщений между подводными объектами | 2021 |
|
RU2758637C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
Изобретение относится к контрольно-измерительной техники и может быть использовано при проведении соревнований различных подводных объектов (ПО), например аквалангистов на морской акватории. Технический результат заключается в возможности проведения пространственно-временного мониторинга соревнований самодвижущихся ПО на больших морских акваториях, не пропускающих световые лучи. Способ заключается в расположении на финишной прямой вне трассы следования ПО финишного гидроакустического приемника и обработке выходных сигналов гидроакустического приемника на компьютере, причем на стартовой прямой вне трассы следования ПО дополнительно располагают стартовый гидроакустический приемник, а на каждом из ПО закрепляют тональный гидроакустический излучатель с частотой f0, затем стартовым и финишным гидроакустическими приемниками принимают доплеровские частоты fc(t), и fф(t), соответствующие каждому двигающемуся ПО, и на временах tс≪t и t≪tф, когда значения соответствующих доплеровских частот fc(t) и fф(t) с точностью до погрешностей измерений постоянны, определяют скорости Vc и Vф движения каждого из ПО, соответствующие временам tc старта и tф финиша ПО, затем фиксируют время tф финиширования каждого из ПО в момент равенства нулю мгновенных доплеровских частот (fф(t)-f0) и определяют на компьютере траверзные расстояния dф между каждым ПО и финишным гидроакустическим приемником. 2 з.п.ф-лы, 2 ил.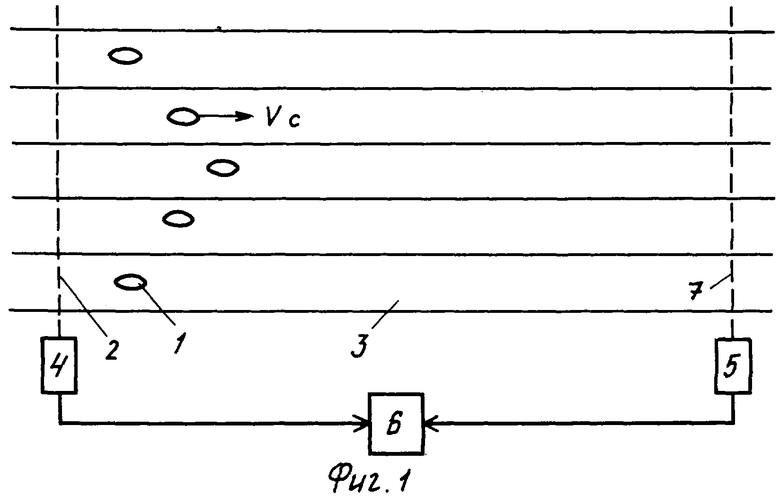
где t, (с) - текущее время; с, (м/с) - скорость звука, затем фиксируют время tф финиширования каждого из подводных объектов в момент равенства нулю мгновенных доплеровских частот (fф(t)-f0), (Гц) и определяют на компьютере траверзные расстояния dф, (м) между каждым подводным объектом и финишным гидроакустическим приемником, исходя из математической зависимости
где dc, (м) - траверзные дистанции между подводными объектами и стартовым гидроакустическим приемником.
| US 4752764, 21.05.1988 | |||
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ СКОРОСТИ ДВИЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154287C1 |
| US 5463598 А, 31.10.1995 | |||
| ИНДИКАТОР КОНТРОЛЯ СТЕПЕНИ СУХОСТИ НАСЫЩЕННОГО ВОДЯНОГО ПАРА | 2007 |
|
RU2376585C2 |
| JP 2000111375, 18.04.2000 | |||
| JP 2002277481, 25.09.2002. | |||

