Изобретение относится к радиолокации и может быть использовано в РЛС для контроля воздушного пространства и управления воздушным движением.
Процесс контроля воздушного пространства заключается в его обзоре с помощью РЛС, обнаружении объектов и измерении их координат, а процесс управления - в назначении эшелона (высоты полета), параметров трасс движения объектов через контролируемое пространство и проверка выполнения объектами назначенных параметров.
Для обеспечения этих функций необходимо знание текущих координат объектов - азимута, дальности и высоты полета, измерение азимута и дальности должно проводиться непрерывно, а высоты - эпизодически (при смене эшелона, при входе объекта в часть зоны с высокой плотностью движения, с гористым рельефом местности, при обнаружении маневра по высоте и т.д.) [Справочник по радиолокации /Под ред. М.Сколника, т.4., М.: Советское радио, 1978, с.69].
Для непрерывного контроля за объектами необходимо непрерывное их наблюдение РЛС, поэтому в районах интенсивного движения воздушных объектов применяют несколько РЛС, каждая их которых обслуживает часть объектов.
Классическим способом обзора воздушного пространства является последовательный обзор с помощью РЛС, имеющей игольчатую форму луча ДНА (там же, с. 72, а также Сиверс А.П., Суслов Н.А. Основы радиолокации. -М.: Советское радио, 1956, с. 148), при этом дальность определяется по времени запаздывания приема отраженного сигнала, а азимут и угол места, по которому вычислят затем высоту при известной дальности, определяют по положению луча антенны, при котором обнаружен объект.
Игольчатый луч можно реализовать в коротковолновом, например, S-диапазоне (Справочник по радиолокации /Под ред. М. Сколника. -М.: Советское радио, т.1, 1976, с.16).
Однако в S-диапазоне трудно обнаруживаются малозаметные объекты, под которыми имеются в виду как летательные аппараты с малыми линейными размерами, так и объекты, созданные по технологии, обеспечивающей их слабую радиозаметность, например по технологии Stealth (Interavia, 1987, IV, p. 331 - 333). Этого недостатка лишен способ обзора пространства длинноволновой РЛС, поскольку отражающая поверхность малозаметных объектов, например, в УВЧ-диапазоне в несколько раз выше, чем в S-диапазоне [БИНТИ-46 (2291), ТАСС, 12.11.86].
Однако в длинноволновом диапазоне трудно получить игольчатую форму луча ДНА, поскольку для этого требуется большая площадь раскрыва антенн (сотни м2), поэтому возникает задача обеспечения обзора пространства РЛС с плоским лучом ДНА.
Известен способ обзора пространства РЛС с плоским и лучами ДНА, формируемыми антенной в виде креста МИЛСА (Сканирующие антенны СВЧ. Пер. с англ. Под ред. Маркова. -М.: Советское радио, 1966). Антенна такого вида состоит из двух пересекающихся под прямым углом линейных решеток, каждая из которых формирует плоский луч. Луч суммарной ДНА представляет собой две пересекающиеся под прямым углом плоскости (сечение такого луча изображено на фиг. 1).
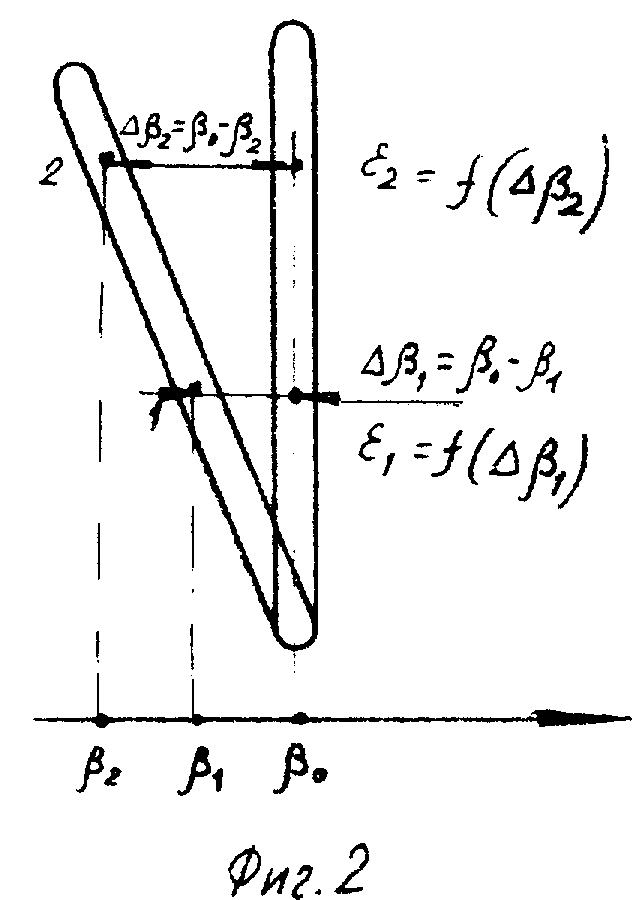
Обзор пространства РЛС с антенной в виде креста МИЛСА может быть осуществлен следующим образом. В процессе вращения антенны в горизонтальной плоскости луч 2, формируемый вертикальной линейной решеткой совершает пилообразное движение вверх-вниз. Принимают решение об обнаружении объекта, если отраженный от него сигнал принят обеими решетками. Угловые координаты объекта будут определяться угловыми координатами перекрестия диаграмм решеток, что эквивалентно положению иглообразного луча. Антенна в виде креста МИЛСА относится к классу антенн с незаполненной апертурой, имеющих площадь существенно ниже по сравнению с обычными антеннами при равных точностях измерения угловых координат. Но линейные размеры в двух измерениях при этом остаются прежними (десятки метров в СВЧ-диапазоне). Поэтому недостаток такого способа состоит в трудности его реализации, особенно для подвижных РЛС из-за чрезмерной громоздкости антенной системы. Кроме того, при нахождении источника помех в зоне обзора РЛС выпадает из-под контроля участок пространства в суммарном объеме двух лучей. Известен способ обзора пространства РЛС с плоскими лучами ДНА, заключающейся в азимутальном перемещении пересекающихся лучей ДНА одного вертикального, а другого - наклонного под углом 45o (РЛС с У-образным лучом) [см. Сиверс А.П., Суслов Н.А., с.157 и Сколник М., т.4, с. 70).
Сечение лучей в вертикальной плоскости показано на фиг. 2. Способ реализуется, по-существу, двумя РЛС с конструктивно объединенными приемо-передающими трактами. Определение расстояния и азимута производится РЛС вертикальным лучом, а РЛС с наклонным лучом включается только при определении угла места обнаруженного объекта. Процесс измерения угла места состоит в следующем. Антенная система вращается в горизонтальной плоскости так, что объект вначале попадает в зону действия вертикального луча, а затем после поворота антенной системы на угол Δβ - наклонного. При этом величина угла Δβ зависит от угла места объекта - εo.
Причем можно показать (там же, с.158), что эта зависимость определяется выражением
Недостатки этого способа обзора пространства состоят в следующем:
1. Неоднозначность определения угла места объекта, если в пределах азимутального разноса вертикального и наклонного лучей находятся несколько объектов на одинаковых дальностях.
2. Возможно перепутывание углов места объектов за счет их перемещения в пространстве в интервале времени, необходимого для поворота антенны на угол Δβ. Исключение составляют объекты, расположенные под минимальным углом места, соответствующем зоне пересечения двух лучей.
3. Выпадение из-под контроля большого объема пространства при воздействии помех (суммарный объем двух лучей).
4. Трудность размещения законченной РЛС на одном транспортном средстве из-за сложности антенной системы. По-существу, требуется разместить две РЛС с совмещенными антенными системами, одна из которых используется эпизодически.
Наиболее близким к изобретению является способ обзора пространства с плоскими лучами ДНА, основанный на образовании в пространстве перекрестия лучей ДНА путем поочередного обнаружения объекта двумя РЛС, одна из которых имеет плоский луч в вертикальной плоскости (поисковая РЛС кругового обзора), а другая - в горизонтальной (РЛС для определения угла места или высотомер) (см. выше А.П.Сиверс, с.142 и Справочник..., т.4, с.68). Поисковая РЛС обнаруживает объект, определяет его дальность и азимут, после чего в этом направлении ориентирует луч ДНА высотомера и просматривают его в пределах углов места, где реально может быть обнаружен объект. При его обнаружении его угловые координаты совпадут с угловыми координатами области пересечения двух зон, соответствующих положениям лучей двух РЛС, при которых был обнаружен объект, привязанный к одной дальности (фиг. 3).
Недостатки этого способа состоят в следующем:
1. Неоднозначность определения угла места объекта, если в пределах азимутального размера луча ДНА, высотомера находится несколько объектов на одинаковых дальностях.
2. Возможно перепутывание высот объектов за счет их перемещения в пространстве в интервале времени, необходимом для измерения угла места.
3. В пунктах контроля воздушного пространства наряду с поисковыми РЛС нужно иметь высотомер, хотя угол места требуется измерять эпизодически.
4. Выпадение из-под контроля большого объема пространства при воздействии помех (в суммарном объеме двух лучей).
Задачей предлагаемого изобретения является обеспечение возможности эпизодического объединения обычных обзорных РЛС для совместного измерения углов места обнаруженных объектов, однозначного измерения угла места объектов без перепутывания, сокращение зоны воздействия помех.
Эта задача решается путем образования пересечения плоских лучей ДНА двух или более обзорных РЛС и перемещения области пересечения по углу места в процессе азимутального перемещения лучей.
Технический результат изобретения достигается тем, что в известном способе обзора пространства радиолокационными станциями с плоскими лучами диаграмм направленности антенн, основанном на образовании пересечения лучей ДНА, согласно изобретению область (области) пересечения образуют путем сближения лучей ДНА двух или более РЛС и наклона плоскости луча одной или нескольких РЛС, а в процессе обзора изменяют относительное положение лучей либо по азимуту, либо по углу места или угла наклона или используют совокупность этих вариантов для перемещения области (областей) пересечения по углу места, а при обнаружении объекта, привязанного к одной дальности, каждой из РЛС, имеющих общую область пересечения лучей, за угловые координаты принимают координаты этой области, а также согласно изобретению область пересечения под одним и тем же углом места образуют путем установки различных углов наклона лучей ДНА более чем двух РЛС или путем последовательной установки таких углов при двух РЛС и принимают решение о наличии объекта, если он обнаруживался при всех устанавливаемых углах, а также согласно изобретению угол наклона луча ДНА каждой РЛС устанавливают с учетом минимизации уровня помех в ее приемном канале, а также согласно изобретению осуществляют прием сигналов одной РЛС одновременно каналами нескольких РЛС, образующих с ней область пересечения.
Изобретение иллюстрируется чертежами.
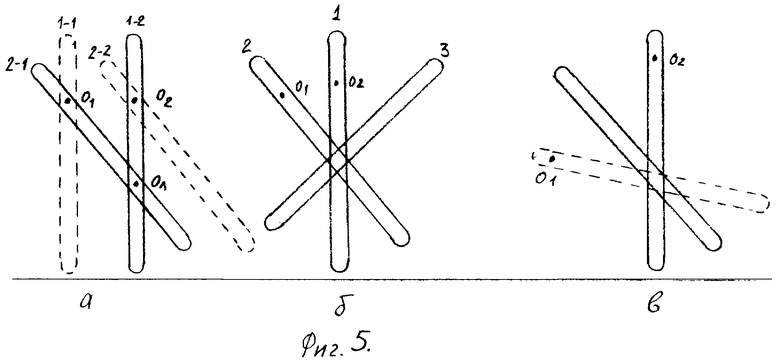
На фиг. 1 изображено сечение лучей в вертикальной плоскости РЛС с антенной типа "крест Милса"; на фиг. 2 - сечение лучей в вертикальной плоскости РЛС с У-образными лучами; на фиг. 3 - сечение лучей в вертикальной плоскости двух РЛС - поисковой (пунктир) и высотомера для положений, при которых обнаружен объект с привязкой к одной дальности; на фиг. 4 - сечение лучей в вертикальной плоскости для РЛС, реализующих изобретение; на фиг. 5: а - сечение лучей в вертикальной плоскости двух РЛС для случая, когда обнаружено два объекта O1 и O2 на одинаковой дальности, в результате чего появляется ложно обнаруженный объект Oл; б, в - возможность устранения Oл с помощью трех РЛС (5,б) и двух (5,в).
Таким образом, сущность изобретения состоит в следующем.
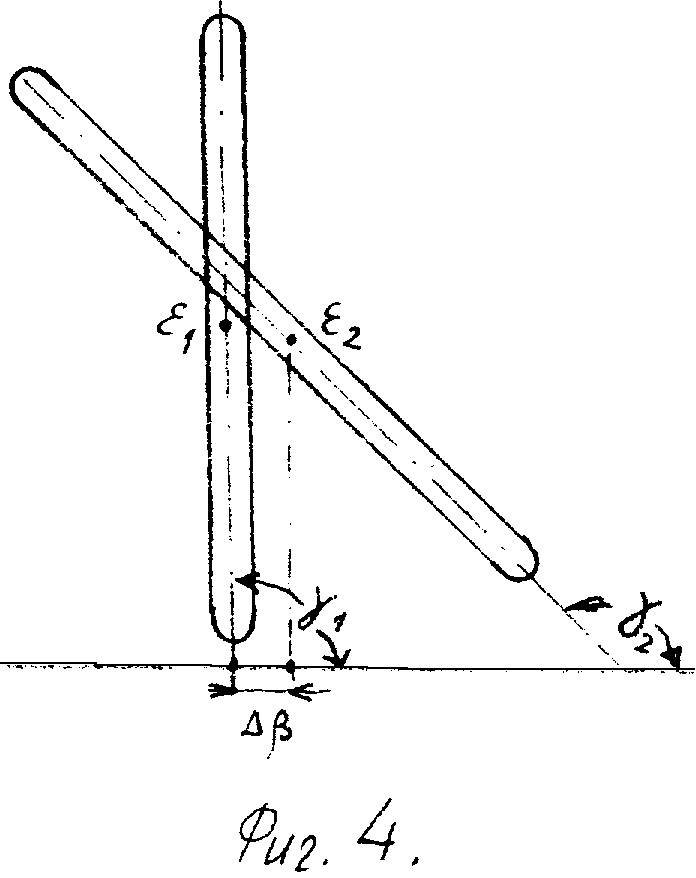
За счет перемещения лучей ДНА РЛС в азимутальной плоскости сближают их, путем наклона плоскости луча хотя бы одной РЛС образуют область (области) пересечения лучей ДНА двух или более РЛС. Сечение в вертикальной плоскости ДНА двух РЛС изображено на фиг. 4. При этом положение лучей ДНА в пространстве определено координатами их осей - углами места ε1, ε2, азимутом одного из лучей, азимутальным углом разноса Δβ, углом наклона к горизонтальной плоскости γ1 и γ2. При обнаружении объекта обеими РЛС на одной дальности (имеется в виду привязка объекта по дальности к одной точке пространства) за его угловые координаты принимают координаты области пересечения. При этом если γ1=90o, то азимут объекта будет соответствовать азимутальному положению ДНА 1-й РЛС, а угол места объекта определяется из соотношений треугольника
Из этого выражения видно, что изменять угол места области пересечения можно за счет перемещения ДНА 2-й РЛС относительно 1-й по азимуту (изменять Δβ ), по углу места (ε2), либо изменять угол наклона (γ2), либо за счет изменения совокупности этих параметров. Наиболее просто осуществлять перемещение области пересечения по углу места за счет изменения Δβ, при этом обзор пространства, например, двумя РЛС будет заключаться в следующем.
ДНА 1-й РЛС осуществляет равномерное круговое движение, а ДНА 2-й РЛС - поочередно обгоняет или отстает от нее, при этом область пересечения будет перемещаться вверх-вниз.
То же самое можно осуществить, если перемещать электронным способом в горизонтальной плоскости луч ДНА 1-й РЛС.
При синхронном вращении антенн перемещение области пересечения возможно за счет изменения одного из углов γ1 или γ2 или их одновременного изменения и т.д.
Выбор варианта перемещения области пересечения будет зависеть и от воздушной обстановки.
Например, в случае возникновения неоднозначности в измерении угла места объектов за счет наличия в зоне нескольких объектов на одинаковом удлинении от РЛС, необходимо осуществить просмотр пространства при различных углах пересечения ДНА. Эта ситуация поясняется на фиг. 5. В воздушном пространстве находится два объекта O1 и O2 на одинаковой дистанции от РЛС. Координаты объекта O1 будут измерены когда лучи ДНА РЛС находятся в положении 1-1 и 2-1 (фиг. 5, а), а объекта O2 - 1-2 и 2-2, но в положении лучей 2-1 и 1-2 будет ложное обнаружение объекта Oл за счет того, что РЛС 2 будет принимать сигналы от объекта O1, а РЛС 1 от O2. Устранить неоднозначность можно за счет образования пересечения под разными углами ДНА 3-х РЛС (фиг. 5,б) либо повторного просмотра участка двумя РЛС с другим углом пересечения (фиг. 5,в), принимая решение от обнаружения объекта только в том случае, если он обнаруживался при всех углах пересечения ДНА.
Путем изменения угла наклона ДНА можно уменьшить объем неконтролируемого из-за воздействия помехи пространства. Так, например, (фиг. 5,в) если источник O1 (например, антенна телецентра) излучает помеху для РЛС, то путем изменения угла наклона можно исключить ее попадание в главный луч ДНА РЛС при осмотре той же области пространства, что можно обнаруживать по минимуму уровня помех в приемном канале. В этом случае объем неконтролируемого пространства уменьшится до объема области пересечения, направленного на источник O1, что эквивалентно объему луча игольчатой формы.
Исключить неоднозначность в обнаружении (исключить ложно обнаруживаемые объекты) наряду с предложенным выше вариантом можно путем одновременного приема сигнала РЛС каналами несколькими РЛС, если они работают на одной частоте. В этом случае область обнаружения будет ограничена только областью пересечения приемных ДНА с передающей, поскольку уровень сигнала вне луча передающей ДНА будет на десятки децибел ниже, чем в области пересечения.
После измерения угла места объектов каждая из РЛС может возобновить обзор заданного ей пространства.
Таким образом, недостатки прототипа устраняются.

Изобретение относится к радиолокации и может быть использовано для контроля воздушного пространства и управления воздушным движением. Технический результат изобретения - однозначное измерение угла места объектов и сокращение зоны воздействия помех. Сущность состоит в том, что создают области пересечения плоских лучей диаграмм направленности антенн (ДНА) двух или более радиолокационных станций (РЛС), а в процессе обзора изменяют относительное пространственное положение пересекающихся лучей и при обнаружении объекта, привязанного к одной дальности каждой РЛС, за его угловые координаты принимают координаты общей области пересечения лучей, причем в варианте выполнения осуществляют прием сигналов одной РЛС каналами приема других РЛС. 2 с. и 2 з.п. ф-лы, 5 ил.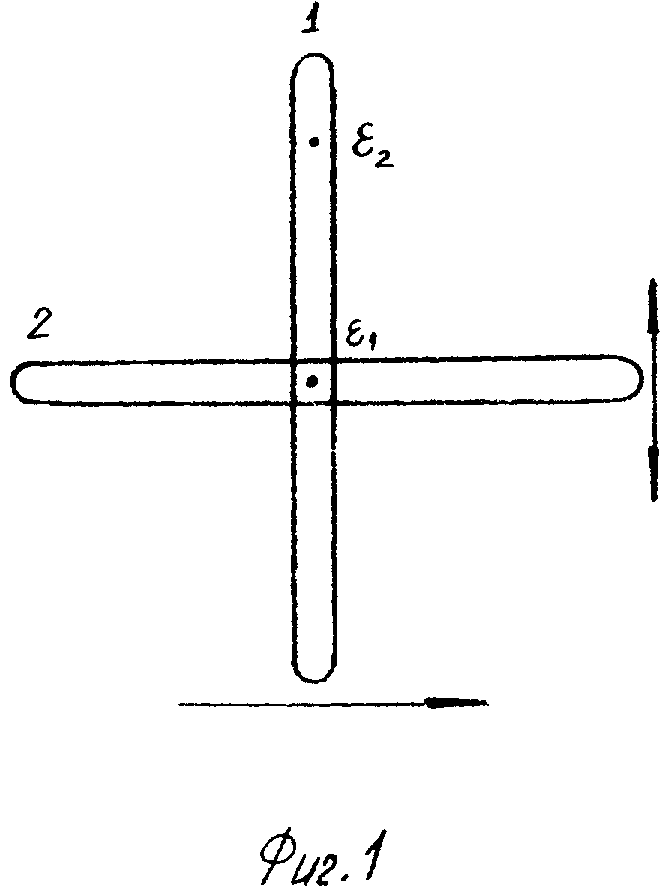
| Болошин И.А | |||
| и др | |||
| Справочник по радиоэлектронным системам /Под ред.Б.Х.Кривицкого, том 2-й | |||
| - М.: Энергия, 1979, с | |||
| Пуговица | 0 |
|
SU83A1 |
| Справочник по радиолокации | |||
| Редактор М.Сколник, том 4-й | |||
| - М.: Советское радио, 1978, с | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |

