Изобретение относится к машиностроению, конкретнее к зубчатым передачам, в которых некоторые из колес имеют подвижные геометрические оси.
Известен планетарный механизм [1, с.8, рис.2а]. В нем сателлит вращается вместе с водилом Н и движется относительно колес а и b.
Недостатком этого механизма является то, что сателлит не может двигаться поступательно, так как мгновенным центром его скоростей является неподвижный зуб колеса b.
Наиболее близким к заявляемому можно отнести планетарный механизм с поступательно движущимся сателлитом [2, с.230, рис.3.150]. Сущность этого механизма заключается в том, что центральное неподвижное колесо с внешним зацеплением контактирует с сателлитом первой от центральной оси орбиты, а сателлит второй от центральной оси орбиты совершает поступательное движение, сателлиты первой и второй орбиты посажены на одно водило и диаметр сателлита второй от центральной оси орбиты равен диаметру центрального неподвижного колеса с внешним зацеплением.
Недостатком описанного механизма является то, что реализовать в практических целях поступательное движение сателлита второй орбиты весьма затруднительно, а для больших нагрузок вообще невозможно. Дело в том, что этот сателлит второй орбиты имеет всего две точки опоры, а именно на водило и на сателлит первой орбиты. Известно, что тело является вполне устойчивым, если оно опирается на три точки. Так, в этом механизме водило и сателлит первой орбиты имеют по три точки опоры.
Задачей изобретения является создание такого зубчатого планетарного механизма, в котором сателлит второй от центральной оси орбиты, совершающий поступательное движение, получит три точки опоры. В таком случае любой рычаг, жестко соединенный с сателлитом второй орбиты, может реализовать поступательное движение с преодолением любых заданных сил сопротивления.
Решение задачи достигается введением рычага, реализующего поступательное движение, жестко соединенного с сателлитом второй орбиты, и дополнительного центрального подвижного колеса с внутренним зацеплением, которое входит в контакт с сателлитом второй орбиты.
Сущность изобретения заключается в том, что создается планетарный механизм для реализации поступательного движения рычага, включающий центральное неподвижное колесо с внешним зацеплением, водило, сателлиты, установленные в два ряда и движущиеся по разным орбитам, при этом сателлит первой орбиты входит в зацепление с центральным неподвижным колесом, диаметр сателлита второй орбиты равен диаметру неподвижного центрального колеса, сателлит второй орбиты, получающий поступательное движение, жестко соединен с рычагом, реализующим поступательное движение, и дополнительно контактирует с центральным подвижным колесом с внутренним зацеплением, через которое механизму задается движение.
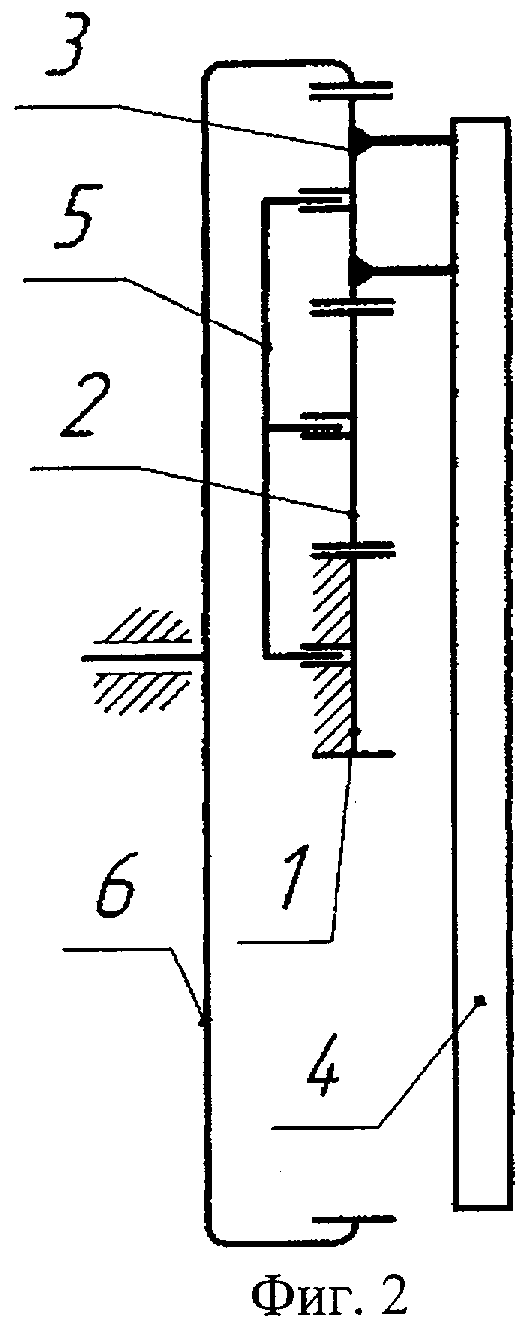
Предлагаемый планетарный механизм для реализации поступательного движения рычага изображен на чертеже, где на фиг.1 изображен вид спереди, а на фиг.2 - вид сбоку.
Механизм содержит центральное неподвижное колесо 1 с внешним зубчатым зацеплением, два сателлита 2 и 3, рычаг 4, водило 5, ось которого является основной осью, относительно которой рассматривается движение механизма, центральное подвижное колесо 6 с внутренним зубчатым зацеплением. Геометрические оси колес 1 и 6 совпадают с основной осью.
Как следует из чертежа, неподвижным центральным колесом с внешним зубчатым зацеплением является колесо 1. Подвижным центральным колесом является колесо 6 с внутренним зубчатым зацеплением. Сателлиты 2 и 3 устанавливаются на водило 5 в ряд. Сателлит 2 входит в зацепление с зубчатым колесом 1 одной кинематической парой р4, колесом 3 одной кинематической парой р4 и водилом 5 с образованием одной кинематической пары р5. Сателлит 3 входит в зацепление с зубчатым колесом 2 одной кинематической парой р4, колесом 6 одной кинематической парой р4 и водилом 5 одной кинематической парой р5, таким образом сателлит получил три точки опоры, а именно на сателлит первой орбиты, на водило и на центральное подвижное колесо с внутренним зацеплением.
Работает механизм следующим образом. При подаче движения на центральное подвижное колесо 6 приводится в движение сателлит 3, который совершает поступательное движение, при этом колесо 2, отталкиваясь от неподвижного колеса 1, совершает сложное движение. Работоспособность такого механизма доказывается известной формулой Чебышева П.Л. [3, с.39, формула (2.5)]
W=3n-2p5-p4.
В предлагаемом механизме число подвижных звеньев n=4: водило 5, колеса 2, 3, 6; число шарниров р5=4: соединение с опорой колеса 6 и водила 5, соединение колес 2 и 3 с водилом 5; число кинематических пар р4=3: контакты колес 1, 2, 3, 6 друг с другом, тогда W=1, что доказывает работоспособность предложенного планетарного механизма для реализации поступательного движения рычага.
Источники информации
1. Кудрявцев В.Н. Планетарные передачи. Москва, Издательство "Машиностроение", 1966, 307 с.
2. Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. Москва, Издательство "Машиностроение", 1965, 1060 с.
3. Артоболевский И.И. Теория механизмов и машин. Москва, Издательство "Наука", 1975, 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЁХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2012 |
|
RU2499929C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2018 |
|
RU2701296C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ШЕСТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2017 |
|
RU2662604C1 |
| Самоустанавливающаяся пятисателлитная планетарная передача | 2015 |
|
RU2622731C1 |
| БЕЗВОДИЛЬНАЯ ТРЕХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2020 |
|
RU2736963C1 |
| СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2020 |
|
RU2728880C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ С БЕЗВОДИЛЬНЫМ САТЕЛЛИТОМ | 2007 |
|
RU2340814C1 |
| СПОСОБ СБОРКИ ЗУБЧАТЫХ ПЛАНЕТАРНЫХ ПЕРЕДАЧ | 2018 |
|
RU2711867C2 |
| ДВУХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА СО СДВОЕННЫМИ КОЛЕСАМИ | 2024 |
|
RU2837945C1 |
Изобретение относится к машиностроению, конкретнее к зубчатым передачам. Механизм содержит центральное неподвижное колесо 1 с внешним зацеплением, два сателлита 2 и 3, водило 5 и подвижное центральное колесо 6 с внутренними зубьями, через которое механизму задается движение. Сателлиты 2 и 3 установлены на водиле 5 в ряд и образуют с водилом 5 вращательные пары. Сателлит 2 входит в зацепление с зубчатым колесом 1 и сателлитом 3. Сателлит 3 входит в зацепление с подвижным центральным колесом 6 и имеет три точки опоры. Диаметры центрального колеса 1 и сателлита 3 равны. Рычаг 4 жестко соединен с сателлитом 3 и совершает поступательное движение. Технический результат - преодоление любых малых сил сопротивления при поступательном движении рычага. 2 ил.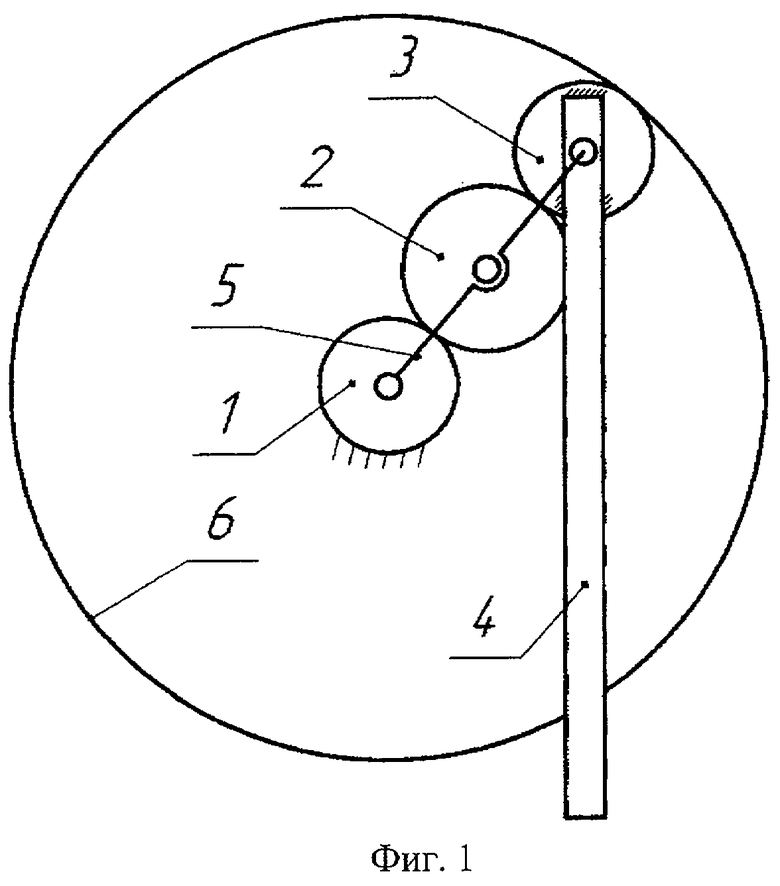
Планетарный механизм для реализации поступательного движения рычага, включающий центральное неподвижное колесо с внешним зацеплением, водило, сателлиты, установленные в два ряда и движущиеся по разным орбитам, при этом сателлит первой орбиты входит в зацепление с центральным неподвижным колесом, диаметр сателлита второй орбиты равен диаметру неподвижного центрального колеса, отличающийся тем, что сателлит второй орбиты, получающий поступательное движение, жестко соединен с рычагом, реализующим поступательное движение, и дополнительно контактирует с центральным подвижным колесом с внутренним зацеплением, через которое механизму задается движение.
| АРТОБОЛЕВСКИЙ И.И | |||
| «Механизмы в современной технике | |||
| Зубчатые механизмы» | |||
| Т.III, M.: Наука, 1973, с.467, схема 585 | |||
| Там же, с.561, схема 685. |

