Изобретение относится к области машиностроения, а именно к планетарным зубчатым передачам и может быть использовано в редукторостроении, станкостроении, горном машиностроении и др.
Известна односателлитная планетарная передача (патент RU №2576215, МПК F16H 1/28, опубл. 27.02.2016), состоящая из неподвижного центрального колеса с внутренним зацеплением, центрального ведущего колеса и сателлита, который соединяется с выходным звеном передачи через дополнительный рычаг, то есть сателлит не закреплен жестко, поэтому его геометрическая ось вращения может смещаться в плоскости. Сателлит, тем самым, самоустанавливаясь в процессе движения, опирается на центральные колеса в трех точках. Кроме того соединение дополнительного рычага с сателлитом может осуществляться как в геометрической оси сателлита, так и в любой другой точке, выбранной на теле сателлита. Недостатком такой передачи является то обстоятельство, что вся мощность от входного звена передается через один сателлит.
Известен также самоустанавливающийся трехсателлитный планетарный редуктор, являющийся наиболее близким к предлагаемому изобретению, состоящий из неподвижного центрального колеса с внутренним зацеплением, центрального ведущего колеса и трех сателлитов, которые соединяются с водилом передачи через трехпарные рычаги. При этом достигается возможность передачи мощности от центрального ведущего колеса к водилу через все три сателлита (патент RU №2541049, МПК F16H 1/48, опубл. 10.02.2015).
Недостатком такой передачи является то обстоятельство, что каждый сателлит контактирует с центральными колесами в двух точках. Данное обстоятельство обуславливается тем, что геометрическая ось вращения каждого из сателлитов не может смещаться в плоскости, вследствие того, что сателлиты жестко закреплены на трехпарных рычагах. Это не позволяет нагрузить такую передачу большим крутящим моментом без изменения материалов зубчатых колес, способа закалки, увеличения модуля колес и т.д.
Технической проблемой, решаемой предлагаемым изобретением, является обеспечение передачи мощности от входного звена к выходному через три сателлита, каждый из которых имеет три точки контакта с центральными колесами.
Решение существующей технической проблемы заключается в том, что в известной трехсателлитной передаче, включающей неподвижное центральное колесо с внутренним зацеплением, центральное ведущее колесо, три сателлита, первый и второй из которых связаны между собой первым трехпарным рычагом, третья пара которого образована вторым трехпарным рычагом, соединенным во вторую пару с третьим сателлитом, и выходное звено, согласно изобретению, каждый из трех сателлитов соединен с трехпарными рычагами через двухпарные поводки, а выходное звено передачи соединено со вторым трехпарным рычагом в его третью кинематическую пару.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в передаче мощности от входного звена к выходному через три сателлита, каждый из которых контактирует с центральными колесами в трех точках.
Это достигается тем, что каждый из сателлитов соединяется с трехпарными рычагами через двухпарные поводки, которые позволяют в процессе движения сателлитов смещаться их геометрическим осям вращения в плоскости, при этом сателлиты самоустанавливаются.
Предлагаемая безводильная трехсателлитная планетарная передача проиллюстрирована на чертеже, где обозначены: неподвижная стойка О, относительно которой осуществляется движение, центральное ведущее зубчатое колесо 1, неподвижное зубчатое колесо с внутренним зацеплением 2, первый сателлит 3, второй сателлит 4, третий сателлит 5, двухпарный поводок 6, который соединяет каждый сателлит с трехпарными рычагами 7 (первый трехпарный рычаг) и 8 (второй трехпарный рычаг). Выходное звено 9 передачи соединено со вторым трехпарным рычагом 8 через его третью пару.
Звенья между собой соединены в кинематические пары: одноподвижные пятого класса р5 (шарниры): I - первый сателлит 3 - с двухпарным поводком 6, II - двухпарный поводок 6 - с первым трехпарным рычагом 7, III - первый трехпарный рычаг 7 - с двухпарным поводком 6, IV - двухпарный поводок 6 - со вторым сателлитом 4, V - первый трехпарный рычаг 7 - со вторым трехпарным рычагом 8, VI - второй трехпарный рычаг 8 - с двухпарным поводком 6, VII - двухпарный поводок 6 - с третьим сателлитом 5, VIII - второй трехпарный рычаг 8 - с выходным звеном 9, IX - выходное звено 9 - со стойкой О.
Двухподвижных пар четвертого класса р4 (пары зацепления) - по три пары каждого из сателлитов соответственно с центральными колесами 1 и 2. Таким образом, всего в механизме используются кинематических пар р5=10, кинематических пар р4=9, а общее число подвижных звеньев n=10.
Известно, что подвижность плоских механизмов с парами р5 и р4 определяется структурной формулой Чебышева П.Л. (Артоболевский И.И. Теория механизмов и машин изд. четвертое «Наука», Москва, 1988 г. с. 38, формула 2,5), имеющей вид:
W=3n-2p5-p4,
где n - число подвижных звеньев;
р5 и р4 - числа кинематических пар пятого и четвертого классов. Как показано выше, в предлагаемой безводильной трехсателлитной планетарной передаче n=10, р5=10, p4=9. Подставляя эти значения в формулу П.Л. Чебышева, получим, что W=30-20-9=1, т.е. предлагаемая планетарная передача работоспособна.
Работает предлагаемая трехсателлитная планетарная передача следующим образом: при задании вращения центральному колесу 1, движение от него передается на сателлиты 3, 4, 5 равномерно через три двухпарных поводка 6, и два трехпарных рычага 7 и 8, последний из которых соединен с выходным звеном 9 передачи. Таким образом, крутящий момент от центрального колеса 1 равномерно передается через все три сателлита, каждый из которых имеет три точки контакта с центральными колесами 1 и 2, через группу нулевой подвижности, представленную в виде трех двухпарных поводков 6, двух трехпарных рычагов 7 и 8, и выходного звена 9, что и является достоинством предлагаемой передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| ЧЕТЫРЁХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2012 |
|
RU2499929C1 |
| СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2020 |
|
RU2728880C1 |
| Самоустанавливающаяся пятисателлитная планетарная передача | 2015 |
|
RU2622731C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ШЕСТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2017 |
|
RU2662604C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2018 |
|
RU2701296C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ С БЕЗВОДИЛЬНЫМ САТЕЛЛИТОМ | 2007 |
|
RU2340814C1 |
| СПОСОБ СБОРКИ ЗУБЧАТЫХ ПЛАНЕТАРНЫХ ПЕРЕДАЧ | 2018 |
|
RU2711867C2 |
| Зубчатая безводильная планетарная передача | 2016 |
|
RU2617887C1 |

Изобретение относится к области машиностроения. Безводильная трехсателлитная планетарная передача включает неподвижное центральное колесо с внутренним зацеплением, центральное ведущее колесо, три сателлита, первый и второй из которых связаны между собой первым трехпарным рычагом, третья пара которого образована вторым трехпарным рычагом, соединенным во вторую пару с третьим сателлитом, и выходное звено. Каждый из трех сателлитов соединен с трехпарными рычагами через двухпарные поводки, а выходное звено передачи соединено со вторым трехпарным рычагом в его третью кинематическую пару. Обеспечивается передача мощности от входного звена к выходному через три сателлита, каждый из которых контактирует с центральными колесами в трех точках. 1 ил.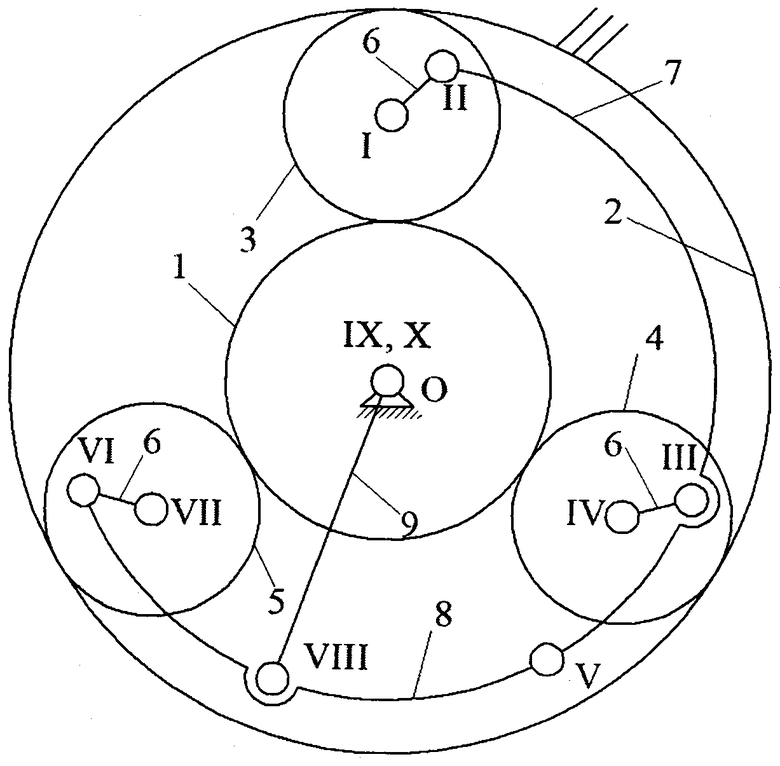
Безводильная трехсателлитная планетарная передача, включающая неподвижное центральное колесо с внутренним зацеплением, центральное ведущее колесо, три сателлита, первый и второй из которых связаны между собой первым трехпарным рычагом, третья пара которого образована вторым трехпарным рычагом, соединенным во вторую пару с третьим сателлитом, и выходное звено, отличающаяся тем, что каждый из трех сателлитов соединен с трехпарными рычагами через двухпарные поводки, а выходное звено передачи соединено со вторым трехпарным рычагом в его третью кинематическую пару.
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| СПОСОБ ЛОВА РЫБЫ | 0 |
|
SU183533A1 |
| US 20190063555 A1, 28.02.2019. | |||

