Изобретение относится к области машиностроения, а именно к планетарным зубчатым передачам и может быть использовано в редукторостроении, станкостроении, горном машиностроении и др.
Известна односателлитная планетарная передача, так называемый «планетарный механизм Джеймса». Он содержит в своем составе неподвижное центральное колесо, центральное ведущее колесо, сателлит и водило (Артоболевский И.И. Теория механизмов и машин изд. четвертое «Наука», Москва, 1988 г., стр. 162, рис. 7.23).
Недостатком такой передачи является то, что вся мощность от входного звена передается через один сателлит.
Как следует из работы Руденко Н.Ф. (Планетарные передачи. Гос. Науч. Тех. Издательство, Машиностроительная литература. Москва 1947, стр. 564, §52), при постановке нескольких сателлитов, передача вращательного момента делится между ними и «нагрузка на зубья уменьшается, а редуктор получает меньшие габаритные размеры». Однако при этом возникает проблема с подвижностью механизмов и передачей нагрузки, т.к. «весьма трудно добиться равномерного распределения нагрузки на сателлиты», что требует постановки «уравнительных механизмов». В этой работе на стр. 546, фиг. 702, приводятся две схемы (а и b) создания уравнительных механизмов. Оказалось, что уже при двух сателлитах необходимо вводить дополнительно от трех до пяти звеньев. Такие решения не получили в технике применения.
Наиболее близкой к предлагаемой планетарной передаче является передача с пятью сателлитами (патент RU №2622731, МПК F16H 1/48, опубл. 19.06.2017), где достигается возможность передачи движения от центрального колеса к водилу через пять сателлитов.
Недостатком такой передачи является то, что она усложнена тем, что шарниры, соединяющие между собой трехпарные шатуны, вынесены за пределы осей сателлитов, вследствие этого для обеспечения самоустанавливаемости сателлитов между центральными колесами, необходимо использовать специально выполненные шарниры.
Технической проблемой, решаемой предлагаемым изобретением, является обеспечение определенности движения и передачи мощности от входного звена к водилу через все пять сателлитов без введения в механизм дополнительных специально выполненных шарниров.
Решение технической проблемы заключается в том, что в известной пятисателлитной планетарной передаче, состоящей из центрального ведущего зубчатого колеса, неподвижного центрального колеса с внутренним зацеплением, пяти сателлитов, соединенных четырьмя трехпарными шатунами, и водила, согласно изобретению, каждый трехпарный шатун, со второго по четвертый, соединен с предыдущим шатуном вторым шарниром, выполненным соосно соответствующему сателлиту, а шарнир, соединяющий четвертый трехпарный шатун и водило, выполнен соосно с пятым сателлитом.
Технический результат, получаемый при использовании предлагаемого изобретения заключается в передаче мощности от входного звена к водилу через все пять сателлитов за счет выполнения вторых шарниров, соединяющих трехпарные шатуны в пары, соосными сателлитам передачи.
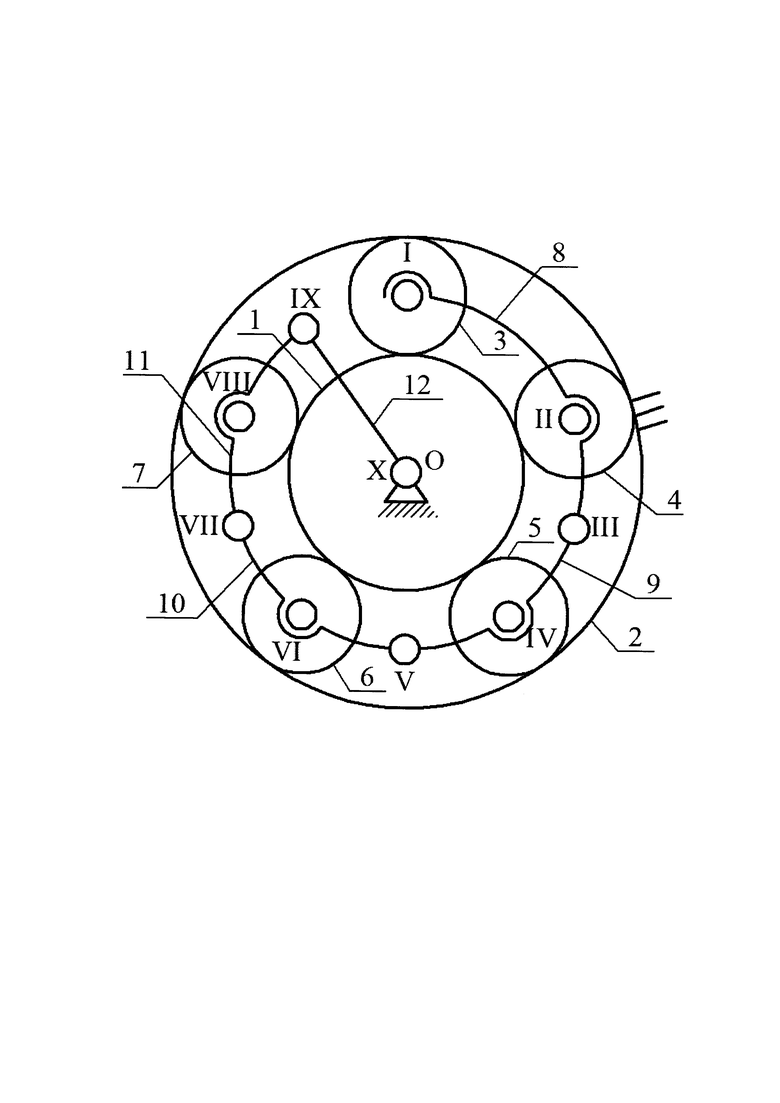
Предлагаемая пятисателлитная планетарная передача изображена на чертеже, где обозначены: неподвижная стойка О, относительно которой осуществляется движение, центральное ведущее зубчатое колесо 1, неподвижное зубчатое колесо 2, первый сателлит 3, второй сателлит 4, третий сателлит 5, четвертый сателлит 6, пятый сателлит 7, первый трехпарный шатун 8, второй трехпарный шатун 9, третий трехпарный шатун 10, четвертый трехпарный шатун 11 и водило 12.
Звенья между собой соединены в кинематические пары: одноподвижные пятого класса р5 (шарниры): I - первый сателлит - 3 с первым трехпарным шатуном 8, II - второй сателлит 4 с первым трехпарным шатуном 8, III - первый трехпарный шатун 8 со вторым трехпарным шатуном 9, IV - третий сателлит - 5 со вторым трехпарным шатуном 9, V-второй трехпарный шатун 9 с третьим трехпарным шатуном 10, VI - четвертый сателлит 6 с третьим трехпарным шатуном 10, VII - третий трехпарный шатун 10 с четвертым трехпарным шатуном 11, VIII - пятый сателлит 7 с четвертым трехпарным шатуном 11, IX - четвертый трехпарный шатун 11 с водилом 12, X - водило 12 со стойкой О, и двухподвижные пары четвертого класса р4 (пары зацепления) - по две пары каждого из сателлитов соответственно с центральным колесом 1 и с неподвижным зубчатым колесом 2. Таким образом, всего в механизме используются кинематических пар р5=11, кинематических пар р4=10, а общее число подвижных звеньев 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 n=11.
Известно, что подвижность плоских механизмов с парами р5 и р4 определяется структурной формулой Чебышева П.Л. (Артоболевский И.И. Теория механизмов и машин изд. четвертое «Наука», Москва, 1988 г. с. 38, формула 2,5), имеющей вид
W=3n-2p5-p4,
где n - число подвижных звеньев, р5 и р4 - числа кинематических пар пятого и четвертого классов.
Как показано выше, в предлагаемой пятисателлитной передаче n=11, р5=11, р4=10. Подставляя эти значения в формулу Чебышева, получим, что W=33-22-10=1, т.е. предлагаемая планетарная передача вполне работоспособна.
Работает предлагаемая пятисателлитная планетарная передача следующим образом: при задании движения центральному колесу 1, движение от него передается на сателлиты 3, 4, 5, 6, 7 равномерно через четыре трехпарных шатуна 8, 9, 10, 11 соединенных с водилом 12.
Таким образом, крутящий момент от центрального колеса 1 равномерно передается на все пять сателлитов через группу нулевой подвижности, представленную в виде трехпарных шатунов, у которых шарниры, соединяющие их в пары, выполнены соосно с сателлитами передачи, что и является достоинством предлагаемой планетарной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоустанавливающаяся пятисателлитная планетарная передача | 2015 |
|
RU2622731C1 |
| ЧЕТЫРЁХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2012 |
|
RU2499929C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ШЕСТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2017 |
|
RU2662604C1 |
| СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2020 |
|
RU2728880C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| БЕЗВОДИЛЬНАЯ ТРЕХСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2020 |
|
RU2736963C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| СПОСОБ СБОРКИ ЗУБЧАТЫХ ПЛАНЕТАРНЫХ ПЕРЕДАЧ | 2018 |
|
RU2711867C2 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| ЧЕТЫРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР С ДВУМЯ ВЫХОДНЫМИ ВАЛАМИ | 2023 |
|
RU2814524C1 |
Изобретение относится к области машиностроения. Пятисателлитная планетарная передача состоит из центрального ведущего зубчатого колеса, неподвижного центрального колеса с внутренним зацеплением, пяти сателлитов, соединенных четырьмя трехпарными шатунами, и водила. Каждый трехпарный шатун, со второго по четвертый, соединен с предыдущим шатуном вторым шарниром, выполненным соосно соответствующему сателлиту, а шарнир, соединяющий четвертый трехпарный шатун и водило, выполнен соосно с пятым сателлитом. Обеспечивается передача мощности от входного звена к водилу через все пять сателлитов. 1 ил.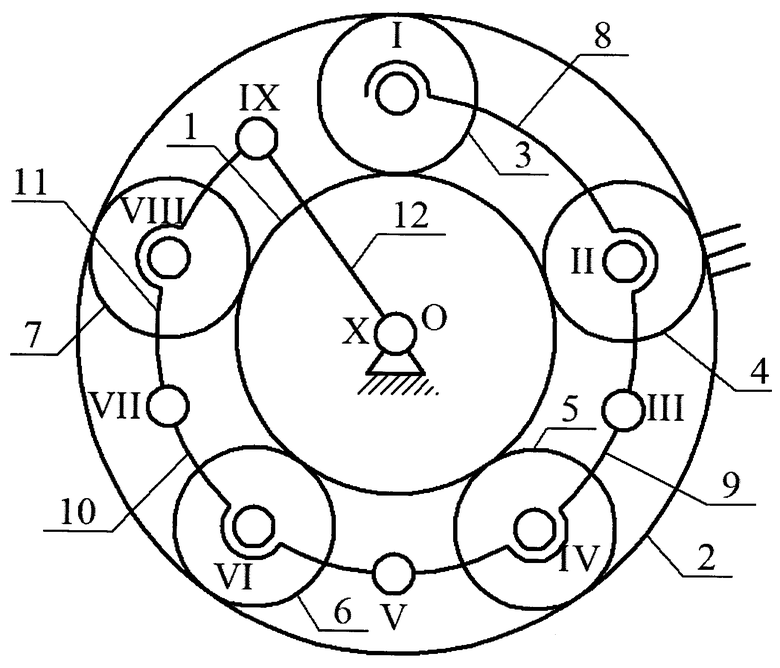
Самоустанавливающаяся пятисателлитная планетарная передача, состоящая из центрального ведущего зубчатого колеса, неподвижного центрального колеса с внутренним зацеплением, пяти сателлитов, соединенных четырьмя трехпарными шатунами, и водила, отличающаяся тем, что каждый трехпарный шатун со второго по четвертый соединен с предыдущим шатуном вторым шарниром, выполненным соосно соответствующему сателлиту, а шарнир, соединяющий четвертый трехпарный шатун и водило, выполнен соосно с пятым сателлитом.
| Самоустанавливающаяся пятисателлитная планетарная передача | 2015 |
|
RU2622731C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| СПОСОБ ЛОВА РЫБЫ | 0 |
|
SU183533A1 |
| US 20160245368 A1, 25.08.2016. | |||

