Предлагаемая группа изобретений относится к области разработки систем телеуправления вращающихся вокруг продольной оси ракет и может быть использована в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах.
Одной из задач, решаемых при разработке систем телеуправления ракетами, связанных с обеспечением точности систем автоматического управления ракетами, является задача обеспечения пропорциональности ускорения, развиваемого ракетой в вертикальной и горизонтальной плоскостях наведения, измеренным отклонениям ракеты относительно оси луча (в системах управления по лучу) или оси пеленгатора ракеты (в системах командного управления) соответственно в вертикальной и горизонтальной плоскостях. В идеальном случае вектор ускорения, развиваемого ракетой, и вектор отклонения ракеты от линии прицеливания лежат в одной плоскости и направлены в противоположные стороны (Н.Т.Кузовков. Системы стабилизации летательных аппаратов, М., Высшая школа, 1976 г. , с.226) [1].
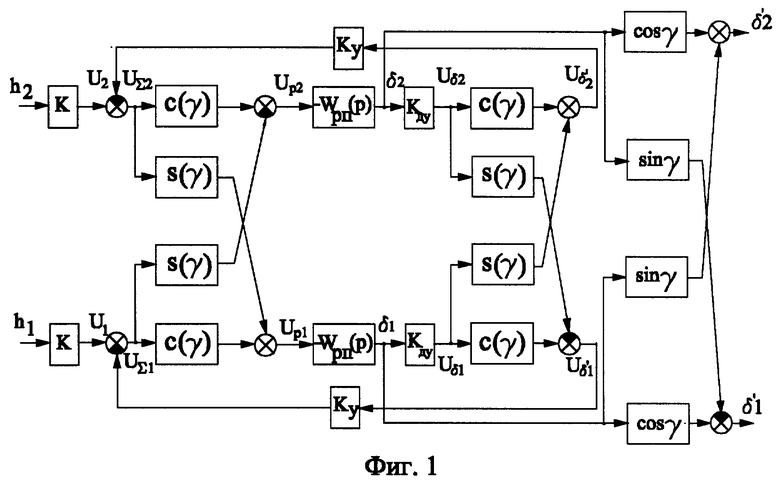
Эту задачу решает способ формирования команд, основанный на охвате двухканального рулевого привода отрицательными обратными связями по огибающим выходных сигналов, заявленный в патенте РФ №2282816, МПК8 F41G 7/00 [2] и являющийся наиболее близким по технической сущности к предлагаемому изобретению. Способ включает формирование сигналов управления U1, U2 первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания соответственно в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты, формирование сигналов управления Up1, Up2 первым и вторым рулевыми приводами путем амплитудной модуляции несущей частоты сигналами управления первого и второго каналов и последующего их суммирования, одновременное с формированием сигналов управления первого и второго каналов формирование сигналов Uδ1, Uδ2, пропорциональных углам отклонения первого и второго рулевых приводов, демодуляцию путем умножения на сигналы несущей частоты и последующее усиление, вычитание из сигналов управления первого и второго каналов в соответствии с зависимостями:
UΣ1=U1-Ky·[Uδ1·c(γ)-Uδ2·s(γ)];
UΣ2=U2-Ky·[Uδ1·s(γ)+Uδ2·c(γ)],
где UΣ1, UΣ2 - сигналы разности в первом и втором каналах,
Ky - коэффициент усиления,
модуляцию сигналов несущей частоты, осуществляемую полученными сигналами разности в первом и втором каналах управления, а также суммирование, осуществляемое в соответствии с зависимостями:
Up1=UΣ1·c(γ)+UΣ2·s(γ);
Up2=-UΣ1·s(γ)+UΣ2·c(γ).
На фиг.1 приведена структурная схема, отражающая динамические процессы формирования сигналов управления рулевыми приводами.
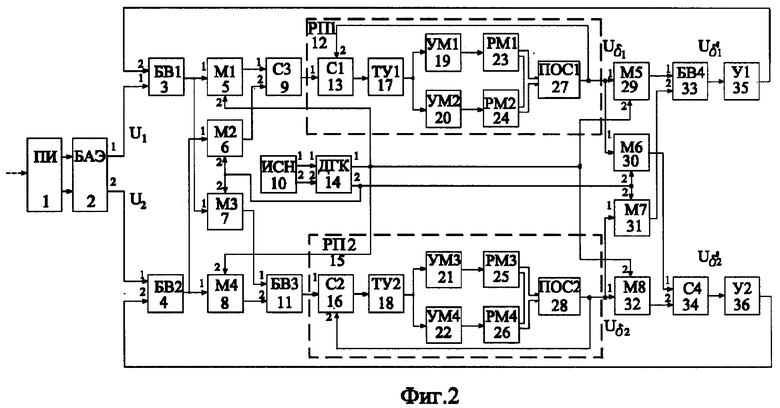
В патенте РФ №2235969, МПК8 F41G 7/00 [3] представлено устройство формирования команд управления, реализующее этот способ. Схема устройства приведена на фиг.2. Устройство включает приемник излучения ПИ 1, бортовую аппаратуру электронную БАЭ 2, первый рулевой привод 12, содержащий первый сумматор 13, первое триггерное устройство 17, первый и второй усилители мощности 19, 20, первую и вторую рулевые машинки 23, 24, первый потенциометр обратной связи 27, второй рулевой привод, содержащий второй сумматор 16, второе триггерное устройство 18, третий и четвертый усилители мощности 21, 22, третью и четвертую рулевые машинки 25, 26, второй потенциометр обратной связи 28, кроме этого устройство включает первый и второй блоки вычитания 3, 4, модуляторы 5, 6, 7, 8, 29, 30, 31, 32, третий сумматор 9, третий блок вычитания 11, четвертый блок вычитания 33, четвертый сумматор 34, первый и второй усилители 35, 36, источник стабилизированного напряжения 10, датчик угла крена гироскопического координатора 14.
В устройстве производится сравнение входных сигналов - команд управления U1, U2 в измерительной невращающейся системе координат с сигналами, полученными путем разложения выходного вектора команд управления  на составляющие Uδ1', Uδ2' в невращающейся системе координат и представляющими собой результат отработки сигналов управления рулевым приводом, который внес в них соответствующие искажения по фазе и амплитуде.
на составляющие Uδ1', Uδ2' в невращающейся системе координат и представляющими собой результат отработки сигналов управления рулевым приводом, который внес в них соответствующие искажения по фазе и амплитуде.
Результат сравнения используется для такого изменения входных сигналов рулевых приводов, которое обеспечивало бы минимальное рассогласование между входным вектором команд управления  и выходным вектором управляющего воздействия
и выходным вектором управляющего воздействия  .
.
Как показано в описании способа и устройства формирования команд управления, основанных на охвате двухканального рулевого привода отрицательными обратными связями по огибающей выходного сигнала и принятых за прототип, в них между вектором управляющего воздействия  и вектором отклонения ракеты
и вектором отклонения ракеты  от линии прицеливания имеет место соотношение
от линии прицеливания имеет место соотношение
 ,
,
что указывает на то, что при реализации указанного способа и устройства формирования команд управления ракетой вектор управляющего воздействия и вектор отклонения ракеты  от линии прицеливания лежат в одной плоскости и направлены в противоположные стороны, т.е. реализуется так называемая радиальная коррекция траектории ракеты, при которой ликвидация отклонения происходит по кратчайшему пути - в плоскости, в которой лежит вектор .
от линии прицеливания лежат в одной плоскости и направлены в противоположные стороны, т.е. реализуется так называемая радиальная коррекция траектории ракеты, при которой ликвидация отклонения происходит по кратчайшему пути - в плоскости, в которой лежит вектор .
Однако последовательность операций в способе формирования команд управления и устройство формирования команд управления, представленные в [2] и [3], не обеспечивают требуемую устойчивость контура управления ракетой, поскольку входящие в контур управления кроме формирователя команд управления динамические звенья "ракета" и "кинематическое звено", связывающее нормальные ускорения, развиваемые ракетой в вертикальной и горизонтальной плоскостях, и ее отклонения от линии прицеливания в соответствующей плоскости, представляют собой слабодемпфированное колебательное и двойное интегрирующее звенья, вследствие чего система автоматического управления ракетой является структурно неустойчивой.
В этом случае процесс ликвидации отклонения ракеты от линии прицеливания будет носить колебательный характер, что существенно снизит точность наведения ракеты на цель.
Для обеспечения устойчивости системы автоматического управления ракетой вектор управляющего воздействия  должен быть пропорционален не только вектору отклонения ракеты от линии прицеливания, но и скорости изменения этого отклонения.
должен быть пропорционален не только вектору отклонения ракеты от линии прицеливания, но и скорости изменения этого отклонения.
Требуемое соотношение между векторами и выражает зависимость, записанную в операторной форме:

где WКУ(p) - передаточная функция так называемого корректирующего устройства, обеспечивающего стабилизацию системы теленаведения (с.234, [1]).
Задачей предлагаемой группы изобретений является повышение точности наведения ракеты с формирователем команд управления на основе охвата рулевого привода обратными связями по огибающей выходного сигнала за счет повышения запасов устойчивости системы управления ракетой.
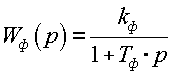
Поставленная задача решается посредством того, что в известном способе формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой, включающем формирование сигналов управления U1, U2 первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания соответственно в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты, демодуляцию сигналов, пропорциональных углам отклонения рулей первого и второго рулевых приводов, сигналами несущей частоты, вычитание полученных в результате демодуляции сигналов в первом и втором каналах из соответствующих сигналов управления и формирование сигналов управления первым и вторым рулевыми приводами посредством модуляции полученных сигналов разности в первом и втором каналах управления сигналами несущей частоты, дополнительно после демодуляции сигналы отклонения рулей первого и второго рулевых приводов пропускают через фильтры нижних частот с передаточной функцией
 ,
,
где  ;
;
TФ=4·ξПЛ·TПЛ·nЭ, c; n=2·nЭ+3·ξПЛ;
 ,
,  , c,
, c,
kРП, kДУ - коэффициенты передачи соответственно рулевого привода, датчика углового отклонения;
φЗЖ - желаемое значение запаса по фазе системы автоматического управления ракетой, … °,
ξпл - относительный коэффициент демпфирования планера ракеты,
fпл - собственная частота планера ракеты, Гц,
а перед модуляцией сигналы разности первого и второго каналов пропускают через фазовращатель на угол фазирования
γф=ω0·τрп,
где ω0 - круговая частота вращения ракеты по крену, 1/с,
τрп - эквивалентная постоянная времени рулевого привода, с.
Предлагаемый способ может быть реализован устройством формирования команд управления вращающейся вокруг продольной оси ракетой, содержащим последовательно соединенные приемник излучения и блок аппаратуры электронной, первый и второй выходы которого соединены с первыми входами соответственно первого и второго блоков вычитания, первый и второй усилители, первый, второй, третий и четвертый модуляторы, последовательно соединенные третий сумматор, первый рулевой привод с последовательно соединенными первым сумматором и первым триггерным устройством, а также с первым потенциометром обратной связи, последовательно соединенные третий блок вычитания и второй рулевой привод с последовательно соединенным вторым сумматором и вторым триггерным устройством, а также со вторым потенциометром обратной связи, причем первый и второй входы третьего сумматора соединены с выходами соответственно первого и второго модуляторов, а первый и второй входы третьего блока вычитания соединены с выходами соответственно третьего и четвертого модуляторов, выходы первого и второго потенциометров обратной связи соединены со вторыми входами соответственно первого и второго сумматоров, пятый и шестой модуляторы, первые входы которых соединены с выходом первого потенциометра обратной связи, седьмой и восьмой модуляторы, первые входы которых соединены с выходом второго потенциометра обратной связи, а также четвертый блок вычитания и четвертый сумматор, подключенные своими первыми входами соответственно к выходам пятого и шестого модуляторов, а вторыми входами - к выходам соответственно седьмого и восьмого модуляторов, последовательно соединенные источник стабилизированного напряжения и датчик угла крена гироскопического координатора, первый выход которого соединен со вторыми входами первого, четвертого, пятого и восьмого модуляторов, а второй выход - со вторыми входами второго, третьего, шестого и седьмого модуляторов, в которое введены третий и четвертый усилители, пятый сумматор, пятый блок вычитания и два фильтра нижних частот, при этом входы первого и второго усилителей соединены с выходом первого блока вычитания, входы третьего и четвертого усилителей соединены с выходом второго блока вычитания, а выходы первого и третьего усилителей соединены соответственно с первым и вторым входами пятого сумматора, выход которого соединен с первыми входами первого и третьего модуляторов, выходы второго и четвертого усилителей соединены соответственно с первым и вторым входами пятого блока вычитания, выход которого соединен с первыми входами второго и четвертого модуляторов, входы первого и второго фильтров нижних частот соединены с выходами соответственно четвертого блока вычитания и четвертого сумматора, а выходы - со вторыми входами соответственно первого и второго блоков вычитания, при этом отношение коэффициентов усиления второго и первого усилителей и отношение коэффициентов усиления третьего и четвертого усилителей составляет ω0·τрп.
Схема устройства представлена на фиг.4.
Устройство включает приемник излучения ПИ 1, бортовую аппаратуру электронную БАЭ 2, первый рулевой привод (РП1) 12, содержащий первый сумматор 13, первое триггерное устройство 17, первый и второй усилители мощности 19, 20, первую и вторую рулевые машинки 23, 24, первый потенциометр обратной связи 27, второй рулевой привод (РП2) 15, содержащий второй сумматор 16, второе триггерное устройство 18, третий и четвертый усилители мощности 21, 22, третью и четвертую рулевые машинки 25, 26, второй потенциометр обратной связи 28, первый и второй блоки вычитания 3, 4, модуляторы 5, 6, 7, 8, 29, 30, 31, 32, третий сумматор 9, третий блок вычитания 11, четвертый блок вычитания 33, четвертый сумматор 34, первый усилитель 35, второй усилитель 36, источник стабилизированного напряжения 10, датчик угла крена гироскопического координатора 14, к которым добавлены фазовращатель, выполненный на четырех усилителях 35, 36, 37, 38, пятом сумматоре 39, пятом блоке вычитания 40, и два фильтра нижних частот (ФНЧ) 41, 42.
Поступающий в ПИ оптический сигнал, содержащий информацию об отклонении ракеты от оси информационного поля, преобразуется в электрические сигналы, которые поступают на входы БАЭ.
БАЭ осуществляет преобразование сигналов с целью выделения постоянных составляющих напряжений, пропорциональных величинам отклонений ракеты от центра поля по каждому каналу управления.
Фазовращатель осуществляет поворот управляющего вектора команды на угол фазирования γф:
UФ1=UΣ1·k1+UΣ2·k2;
UФ2=UΣ2·k1-UΣ1·k2,
где k1=cosγф, k2=sinγф.
Далее осуществляется преобразование команд управления из системы координат наземной аппаратуры управления во вращающуюся с ракетой систему координат посредством модуляторов вместе с третьим сумматором 9 и третьим блоком вычитания 11 в соответствии с формулами:
UР1=UФ1·с(γ)+UФ2·s(γ);
UР2=UФ2·с(γ)-UФ1·s(γ).
С выходов сумматора 9 и блока вычитания 11 и сигналы UР1 и UР2 поступают на входы двух РП, которые отрабатывают их и формируют вектор управляющих сил, под действием которых ракета изменяет свое угловое положение на траектории и в результате движется в сторону уменьшения отклонений от оси поля управления. На выходах потенциометров обратной связи 27, 28 формируется информация об отклонениях рулей, используемая не только для получения автоколебаний в контуре каждого РП, но и для организации обратной связи по огибающей выходных сигналов РП.
Модуляторы 29, 30, 31, 32 вместе с четвертым блоком вычитания 33 и четвертым сумматором 34 осуществляют преобразование огибающей выходного сигнала РП из вращающейся связанной с ракетой системы координат в невращающуюся систему координат, связанную с наземной аппаратурой управления в соответствии с формулами:
Uδ'1=Uδ1·c(γ)-Uδ2·s(γ);
Uδ'2=Uδ2·c(γ)+Uδ1·s(γ),
где Uδ1, Uδ2 - сигналы с выходов потенциометров обратной связи соответственно первого и второго РП.
Эти сигналы далее подают на ФНЧ 41, 42, которые осуществляют фильтрацию высокочастотных составляющих и выделяют низкочастотные составляющие сигналов отклонений рулей.
На первом и втором блоках вычитания 3, 4 осуществляется сравнение сигналов координат ракеты с сигналами с выходов ФНЧ.
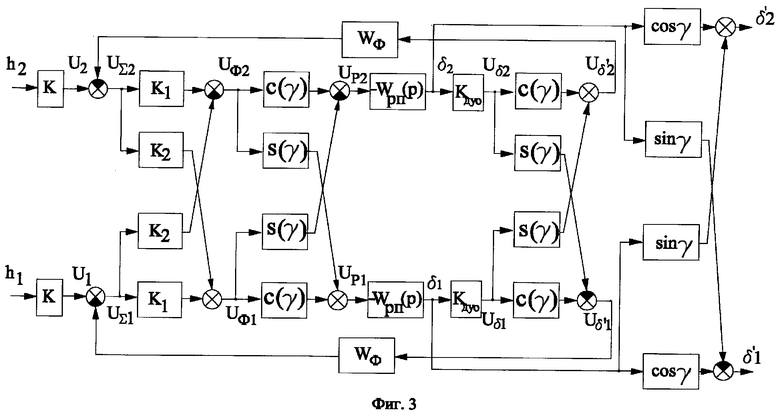
В структурно-динамическом отношении предлагаемое устройство формирования команд управления представляет собой двухканальную систему управления, структурная схема которой приведена на фиг.3. Используя аппарат комплексных переменных и комплексных передаточных функций (А.А.Казамаров, A.M.Палатник, Л.О.Роднянский. Динамика двумерных систем автоматического регулирования. М., Наука, 1967 г., [4]), передаточную функцию предлагаемого устройства формирования команд можно представить в виде:

При решении задач синтеза систем телеуправления ракетами и анализа их устойчивости динамические характеристики РП обычно описываются передаточной функцией
WРП=KРП·expt[-τРП·р]
(В.И.Морозов, С.В.Алехин "Коррекция одноканальных систем телеуправления малогабаритными ракетами". Известия Тульского государственного университета. Серия "Проблемы специального машиностроения", выпуск 3 (ч.1). Материалы региональной научно-технической конференции, г.Тула, 2000, с.302-305, [5]).
С учетом этого:

Учитывая, что в полосе частот пропускания системы телеуправления ракетой ω=0…ωс, где ωс - круговая частота среза (частота пересечения логарифмической амплитудной частотной характеристикой разомкнутой системы оси абсцисс, обычно ωс≤6.28 1/с)
exp[jτРПω]≅1,
а угол фазирования γф выбираем равным ω0·τрп, вследствие чего
exp[jγФ]·exp[-jτРПω0]≡1,
зависимость (3) можно переписать в виде:
или:
где n=1+KРП·KДУ·KФ; 
Анализ зависимости (5) показывает, что передаточная функция предлагаемого устройства формирования команд управления идентична передаточной функции широко используемого для коррекции систем управления (в том числе систем телеуправления ракетами) дифференцирующего фильтра (Н.Т.Кузовков. Теория автоматического регулирования, основанная на частотных методах. М., Оборонгиз, 1960 г., с.343-345, [6]), что указывает на то, что в динамическом отношении предлагаемое устройство формирования команд управления обладает свойствами корректирующего устройства и соответствующим выбором его параметров можно обеспечить устойчивость и точность системы управления ракетой.
Как показано в [5], для обеспечения устойчивости и точности систем телеуправления ракетами параметры дифференцирующего фильтра должны быть связаны с параметрами планера ракеты (собственной частотой fпл и относительным коэффициентом демпфирования ξпл) зависимостями:

 где
где 
φзж - желаемое значение запаса по фазе системы автоматического управления ракетой,

TS=2·ξПЛ·TПЛ.
С учетом (8) зависимости (7) можно переписать в виде
Для обеспечения требуемого в соответствии с зависимостью (9) значения n коэффициент передачи сглаживающего фильтра Kф при заданных КРП и КДУ в соответствии с зависимостью (6) должен составлять:
 .
.
Устройство, реализующее предлагаемый способ, может быть выполнено следующим образом. ПИ состоит из следующих структурных единиц: линзы, светофильтра, фотодиода, усилителя (Выстрел ЗУБК10 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации ЗУБК10.00.00.000 ТО, М., Военное издательство, 1987 г., с.41, [7]). БАЭ состоит из усилителя-ограничителя со схемой автоматической регулировки усиления, порогового устройства, четырех избирательных фильтров, четырех компараторов, четырех нормирующих устройств, двух схем выделения координат, двух корректирующих фильтров, двух усилителей. Связи между структурными единицами БАЭ показаны на рис.11, с.18 [7].
Каждый РП состоит из усилителя, двух рулевых машинок и датчика углового отклонения руля. В свою очередь усилитель состоит из двух идентичных каналов, в состав которых входят суммирующее устройство или сумматор, корректирующий фильтр, триггерное устройство и два противофазных усилителя мощности, нагрузками которых являются обмотки управляющих электромагнитов рулевых машинок. Каждая из рулевых машинок состоит из управляющего электромагнита, распределительного устройства и цилиндра (см. с.20-24, [7]). Принципиальная электрическая схема датчика угла крена гироскопического координатора приведена на рис.12, с.19 [7].
Сумматоры и блоки вычитания выполнены по схеме рис.11.1 (У.Титце, К.Шенк. Полупроводниковая схемотехника. М., Мир, 1982 г., с.137, [8]). Модуляторы выполнены по схеме четырехквадратного умножения (рис.11.41, с.162, [8]). Усилители выполнены по схеме на рис.13.11, с.202, [8]. Источник стабилизированного напряжения выполнен по схеме на рис.3.12, с.102, [8]. Фильтр нижних частот может быть реализован по схеме на рис.13.11, с.202, [8].
Эффективность предлагаемых способа формирования команд управления и устройства для его осуществления подтверждена в процессе разработки комплекса управляемого вооружения "Вихрь".
Источники информации
1. Н.Т.Кузовков. Системы стабилизации летательных аппаратов. М., Высшая школа, 1976 г., с.226.
2. Патент 2282816, ближайший аналог.
3. Патент 2235969, ближайший аналог.
4. А.А.Казамаров, A.M.Палатник, Л.О.Роднянский. Динамика двумерных систем автоматического регулирования. М., Наука, 1967 г.
5. Н.Т.Кузовков. Теория автоматического регулирования, основанная на частотных методах. М., Оборонгиз, 1960 г., с.343-345.
6. В.И.Морозов, С.В.Алехин. "Коррекция одноканальных систем телеуправления малогабаритными ракетами". Известия Тульского государственного университета. Серия "Проблемы специального машиностроения", выпуск 3 (ч.1). Материалы региональной научно-технической конференции, г.Тула, 2000, с.302-305.
7. Выстрел ЗУБК10 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации ЗУБК10.00.00.000 ТО. М., Военное издательство, 1987 г., с.18, 19, 20-24, 41.
8. У.Титце, К.Шенк. Полупроводниковая схемотехника. М., Мир, 1982 г, с.102, 137, 162, 202.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2005 |
|
RU2282816C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2002 |
|
RU2234671C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |

Изобретение относится к области наведения ракет и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах. Технический результат - повышение точности наведения ракеты. Способ включает формирование сигналов управления первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания соответственно в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты, пропорциональных синусу и косинусу угла крена у ракеты. Осуществляют демодуляцию сигналов, пропорциональных углам отклонения рулей первого и второго рулевых приводов, сигналами несущей частоты, вычитание полученных в результате демодуляции сигналов в первом и втором каналах из соответствующих сигналов управления и формирование сигналов управления первым и вторым рулевыми приводами посредством модуляции полученных сигналов разности в первом и втором каналах управления сигналами несущей частоты. Дополнительно после демодуляции сигналы отклонения рулей первого и второго рулевых приводов пропускают через фильтры нижних частот с определенной передаточной функцией. 2 н.. и 1 з.п. ф-лы, 4 ил.
1. Способ формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой, включающий формирование сигналов управления первого и второго каналов, пропорциональных линейным отклонениям ракеты относительно линии прицеливания соответственно в горизонтальной и вертикальной плоскостях, формирование периодических сигналов несущей частоты s(γ), с(γ), пропорциональных синусу и косинусу угла крена γ ракеты, демодуляцию сигналов, пропорциональных углам отклонения рулей первого и второго рулевых приводов, сигналами несущей частоты, вычитание полученных в результате демодуляции сигналов в первом и втором каналах из соответствующих сигналов управления и формирование сигналов управления первым и вторым рулевыми приводами посредством модуляции полученных сигналов разности в первом и втором каналах управления сигналами несущей частоты, отличающийся тем, что после демодуляции сигналы отклонения рулей первого и второго рулевых приводов пропускают через фильтры нижних частот с передаточной функцией
 ,
,
где  ;
;
TФ=4·ξпл·Tпл·nэ, c; n=2·nэ+3·ξпл,
 ,
,  , c,
, c,
Kрп, kду - коэффициенты передачи соответственно рулевого привода, датчика углового отклонения рулей;
φзж - значение запаса по фазе системы автоматического управления ракетой, град.;
ξпл - относительный коэффициент демпфирования планера ракеты;
fпл - собственная частота планера ракеты, Гц;
а перед модуляцией сигналы разности первого и второго каналов пропускают через фазовращатель на угол фазирования
γф=ω0·τрп,
где ω0 - круговая частота вращения ракеты по крену, 1/с;
τрп - эквивалентная постоянная времени рулевого привода, с.
2. Устройство формирования команд управления вращающейся вокруг продольной оси двухканальной ракетой, содержащее последовательно соединенные приемник излучения и блок аппаратуры электронной, первый и второй выходы которого соединены с первыми входами соответственно первого и второго блоков вычитания, первый и второй усилители, первый, второй, третий и четвертый модуляторы, последовательно соединенные третий сумматор, первый рулевой привод с последовательно соединенными первым сумматором и первым триггерным устройством, а также с первым потенциометром обратной связи, последовательно соединенные третий блок вычитания и второй рулевой привод с последовательно соединенными вторым сумматором и вторым триггерным устройством, а также со вторым потенциометром обратной связи, причем первый и второй входы третьего сумматора соединены с выходами соответственно первого и второго модуляторов, а первый и второй входы третьего блока вычитания соединены с выходами соответственно третьего и четвертого модуляторов, выходы первого и второго потенциометров обратной связи соединены со вторыми входами соответственно первого и второго сумматоров, пятый и шестой модуляторы, первые входы которых соединены с выходом первого потенциометра обратной связи, седьмой и восьмой модуляторы, первые входы которых соединены с выходом второго потенциометра обратной связи, а также четвертый блок вычитания и четвертый сумматор, подключенные своими первыми входами соответственно к выходам пятого и шестого модуляторов, а вторыми входами - к выходам соответственно седьмого и восьмого модуляторов, последовательно соединенные источник стабилизированного напряжения и датчик угла крена гироскопического координатора, первый выход которого соединен со вторыми входами первого, четвертого, пятого и восьмого модуляторов, а второй выход - со вторыми входами второго, третьего, шестого и седьмого модуляторов, отличающееся тем, что оно снабжено третьим и четвертым усилителями, пятым сумматором, пятым блоком вычитания и двумя фильтрами нижних частот, при этом входы первого и второго усилителей соединены с выходом первого блока вычитания, входы третьего и четвертого усилителей соединены с выходом второго блока вычитания, а выходы первого и третьего усилителей соединены соответственно с первым и вторым входами пятого сумматора, выход которого соединен с первыми входами первого и третьего модуляторов, выходы второго и четвертого усилителей соединены соответственно с первым и вторым входами пятого блока вычитания, выход которого соединен с первыми входами второго и четвертого модуляторов, входы первого и второго фильтров нижних частот соединены с выходами соответственно четвертого блока вычитания и четвертого сумматора, а выходы - со вторыми входами соответственно первого и второго блоков вычитания.
3. Устройство по п.2, отличающееся тем, что отношение коэффициентов усиления второго и первого усилителей и отношение коэффициентов третьего и четвертого усилителей составляют ω0·τрп.
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2005 |
|
RU2282816C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5197691 A, 30.03.1993 | |||
| DE 3034838 C1, 29.11.1990. | |||

