Изобретение относится к области ракетной техники и предназначается для телеуправления двухканальными вращающимися ракетами.
Известен способ управления, включающий выработку команд управления ракетой по каналам тангажа и рыскания UY и UZ, пропорциональных составляющим потребной нормальной к траектории перегрузки ракеты по соответствующим каналам управления (см. В.П.Демидов, Н.Ш.Кутыев. Управление зенитными ракетами. - М.: Военное издательство, 1989, А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965). Требуемая перегрузка создается поворотом органов управления вокруг связанных с ракетой поперечных осей OZ и OY и обеспечивает движение ракеты в точку встречи с целью по расчетной кинематической траектории наведения. Способ управления ракетой по каналам тангажа и рыскания называется управлением в прямоугольной системе координат, или декартовым управлением.
С целью согласования сигналов ошибок наведения и управляющих воздействий по углу крена ракеты в системах с декартовым управлением ракетами применяется стабилизация вращения ракеты по крену (см. А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.218-223).
Недостатком подобных систем является необходимость применения органов управления креном ракеты (например, элеронов или дифференциальных рулей) и, следовательно, усложнение системы наведения.
Наиболее близким аналогом предлагаемого изобретения является способ управления двухканальной вращающейся ракетой, в котором отсутствует управление креном ракеты (ракета свободно проворачивается относительно продольной оси) и который включает выработку команд управления ракетой по каналам тангажа и рыскания и их перераспределение между каналами в зависимости от измеряемого угла крена. Такую схему управления имеет, например, современный зенитный ракетный комплекс "Тунгуска" (см. // Военный парад, №6, 2001, с.38-41, А.Шипунов, В.Дудка, В.Образумов "Тунгуска" становится эффективнее").
Блок-схема, поясняющая рассматриваемый способ управления, приведена на фиг.1.
Данный способ реализован, например, в системе управления двухканальной вращающейся ракетой противотанкового ракетного комплекса "Фагот", выбранного в качестве прототипа (см. "Переносной противотанковый комплекс 9К111. Техническое описание". - М.: Военное издательство Министерства обороны СССР, 1981, стр.12-17). Такая система управления включает соединенные по каналам тангажа и рыскания блок выработки команд управления ракетой и блок перераспределения команд управления в зависимости от угла крена между каналами управления. Блок выработки команд управления ракетой по измеренным координатам цели и ракеты вырабатывает команды управления по тангажу и рысканию UY и UZ. По линии телеуправления команды поступают в бортовую электронную аппаратуру управления ракетой. Гирокоординатор ракеты, представляющий собой свободный гироскоп с датчиком угла крена ракеты γ, вырабатывает сигналы S(γ)≈sinγ и С(γ)≈cosγ, пропорциональные синусу и косинусу угла крена. Бортовая аппаратура осуществляет преобразование команд управления в связанную с ракетой систему координат (перераспределение команд управления в зависимости от угла крена между каналами управления) по формулам:

Эти команды управления поступают на рулевые приводы и вызывают отклонение рулей ракеты δY' и δZ' в связанной системе координат:

где К - коэффициент передачи рулевого привода.
Таким образом, величина угла отклонения рулей в каждом канале управления проворачивающейся по крену двухканальной ракеты изменяется с частотой крена по гармоническому закону. Отметим, что величина отклонения рулей всегда ограничена некоторой величиной δMAX≈15-20 град, что обусловлено снижением эффективности рулей при большем отклонении, а также конструктивными ограничениями.
Вследствие вращения ракеты по крену осуществляется демодуляция управляющих воздействий (нормальных перегрузок), создаваемых рулями:

где Кп - коэффициент передачи планера по перегрузке, δY и δZ представляют собой отклонения рулей ракеты, приведенные в декартову систему координат.
Если при управлении ракетой рули отклоняются в пределах линейной зоны ±δMAX, то, как следует из формул 1-3, управляющие воздействия пропорциональны командам управления по каждому из каналов управления. Таким образом, рассмотренный способ управления при названных ограничениях обеспечивает согласование сигналов управления и развиваемой ракетой перегрузки.
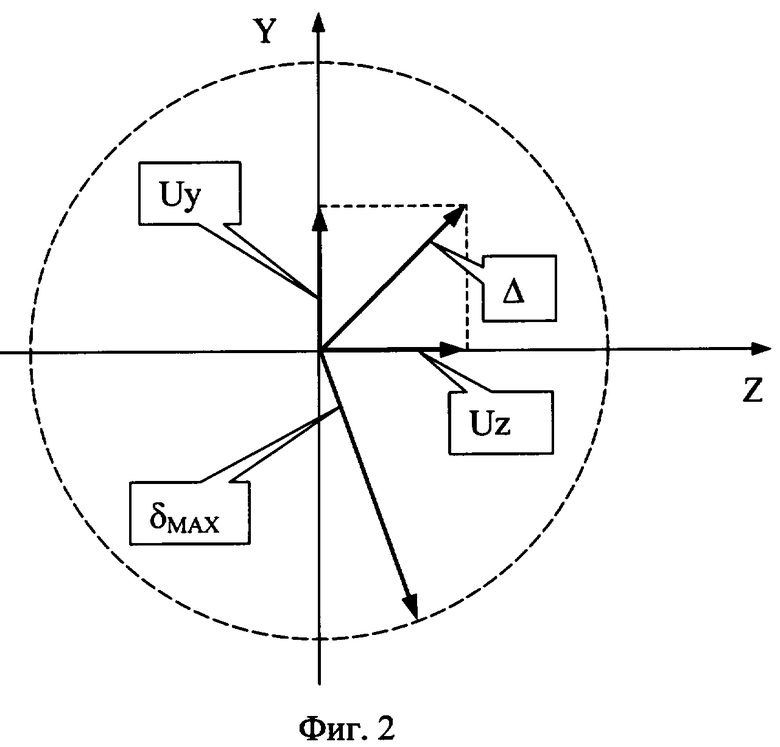
Графики сигналов управления ракетой для данного случая представлены на фиг.2, где показаны проекции вектора команд UY, UZ по осям управления, суммарный вектор команды  и проведена окружность радиусом δМАХ, ограничивающая зону линейного прохождения команд через аппаратуру ракеты. Зоной линейной работы, как следует из фиг.2, является выполнение условия Δ<δМАХ.
и проведена окружность радиусом δМАХ, ограничивающая зону линейного прохождения команд через аппаратуру ракеты. Зоной линейной работы, как следует из фиг.2, является выполнение условия Δ<δМАХ.
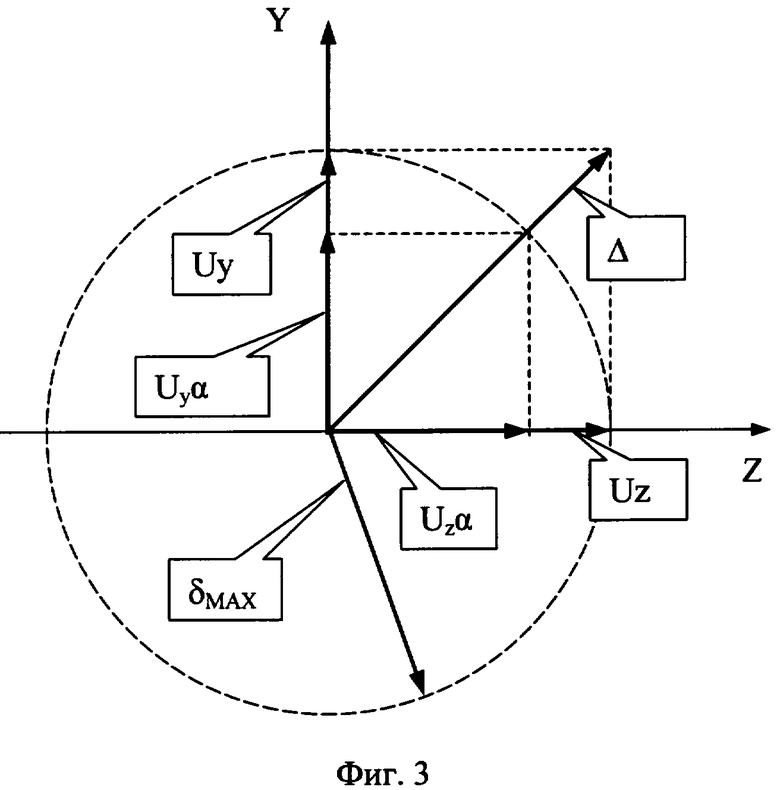
На фиг.3 представлены графики сигналов управления для одного из частных случаев, где величина команд управления по каждому каналу соответствует δМАХ, а модуль вектора управления, приведенный к выходу рулевого привода, составляет  .
.
В соответствии с выражением (3), описывающим пересчет команд управления ракетой (рулей) из системы координат, вращающейся по крену, в систему координат управления, за период вращения по крену среднее значение команды равно величине первой гармоники в командах отклонения рулей. При прохождении гармонического сигнала с амплитудой М через амплитудный ограничитель амплитуда первой гармоники А на выходе ограничителя равна:
А=Кн×М,
где Кн - коэффициент передачи по первой гармонике определяется по выражению:

где В=Хом/М - отношение уровня ограничения (Хом) к амплитуде гармонического сигнала на входе ограничителя (М), см. Попов Е.П., Пальтов И.П. "Приближенные методы исследования нелинейных автоматических систем." - М.: Физматгиз, 1960.
При М≫Хом А≈4×Хом/π, т.е. амплитуда первой гармоники на выходе амплитудного ограничителя не может быть больше 1.27 уровня ограничения, следовательно, отработать модуль команды, равный  аппаратура ракеты не может.
аппаратура ракеты не может.
При ограничении управляющих сигналов уровнем линейности рулевых приводов происходит не только уменьшение коэффициента передачи, но, что очень важно, происходит перегрузка контуров управления рулевых приводов. При величине входного сигнала, превышающей зону линейности привода, руль ложится на упор, контур управления привода размыкается и эквивалентные динамические характеристики (частотные характеристики по первой гармонике частоты крена, измеренные за период вращения по крену) резко ухудшаются. Увеличение фазового запаздывания рулевого привода уменьшает запасы устойчивости контура управления ракеты в целом, что снижает точность наведения ракеты на цель и понижает эффективность ракетного вооружения.
Кроме ухудшения динамики контура управления, подача на рулевой привод команд, превышающих его линейную зону, приводит к образованию на выходе привода высших гармоник частоты вращения по крену, которые создают дополнительные возмущения на ракету. Эти возмущения приводят к увеличению колебаний ракеты по углам атаки и скольжения, увеличению нагрузок на конструкцию и снижению скорости и перегрузки ракеты вследствие возрастания индуктивной составляющей силы лобового сопротивления.
Таким образом, рассмотренный способ управления ракетой приводит к случайному разбросу коэффициента передачи контура управления ракетой и в целом к снижению точности наведения ракеты.
Задачей предлагаемого изобретения является повышение точности наведения ракеты.
Для решения поставленной задачи в способе управления двухканальной вращающейся ракетой, включающем выработку сигналов управления ракетой UY и UZ по каналам тангажа и рыскания, измерение угла крена ракеты и перераспределение команд управления в зависимости от угла крена между каналами управления, с момента начала управления определяют модуль команды ракеты по формуле  , где К - коэффициент передачи рулевого привода, и отношение максимального угла отклонения рулей ракеты δМАХ к модулю команды δМАХ/Δ=α, после чего, если модуль команды превышает величину максимального отклонения рулей Δ>δМАХ, то уменьшают сигналы управления ракетой UY и UZ пропорционально коэффициенту α.
, где К - коэффициент передачи рулевого привода, и отношение максимального угла отклонения рулей ракеты δМАХ к модулю команды δМАХ/Δ=α, после чего, если модуль команды превышает величину максимального отклонения рулей Δ>δМАХ, то уменьшают сигналы управления ракетой UY и UZ пропорционально коэффициенту α.
Таким образом, после выработки сигналов управления ракетой UY и UZ их дополнительно преобразовывают по формулам:
Предложенный способ управления ограничивает модуль управляющего сигнала, приведенный к значению угла отклонения рулевого привода ракеты, величиной максимального угла отклонения привода ракеты. При этом входные сигналы рулевых приводов ограничиваются таким образом, чтобы управление ракетой осуществлялось в пределах линейной зоны отклонения рулей ±δMAX. Исключается перегрузка рулевого привода ракеты и, как следствие, устраняется увеличение фазовых запаздываний рулевого привода, обеспечиваются необходимые запасы устойчивости контура управления, что гарантирует реализацию расчетной точности наведения ракеты.
Изложенный способ может быть реализован посредством системы управления двухканальной вращающейся ракетой, включающей соединенные по каналам тангажа и рыскания блок выработки команд управления и блок перераспределения команд управления в зависимости от угла крена между каналами управления. Новым в системе является то, что в нее введены устройство вычисления модуля сигнала, делитель сигналов, первый и второй усилители-ограничители, при этом первый и второй входы устройства вычисления модуля сигнала соединены с выходами блока выработки команд управления ракетой, вход делителя сигналов соединен с выходом устройства вычисления модуля сигнала, первые и вторые входы усилителей-ограничителей соединены соответственно с выходами блока выработки команд управления и с выходом делителя сигналов, а выходы усилителей-ограничителей - с первым и вторым входами блока перераспределения команд управления.
Изобретение поясняется графическими материалами, где на фиг.1 приведена блок-схема, поясняющая способ управления двухканальной вращающейся ракетой, в котором отсутствует управление креном ракеты и который включает выработку команд управления ракетой по каналам тангажа и рыскания и их перераспределение между каналами в зависимости от измеряемого угла крена; на фиг.2 приведены графики сигналов управления ракетой для случая, когда рули отклоняются в пределах линейной зоны ±δMAX; на фиг.3 представлены графики сигналов управления для одного из частных случаев, где величина команд управления по каждому каналу соответствует δМАХ.
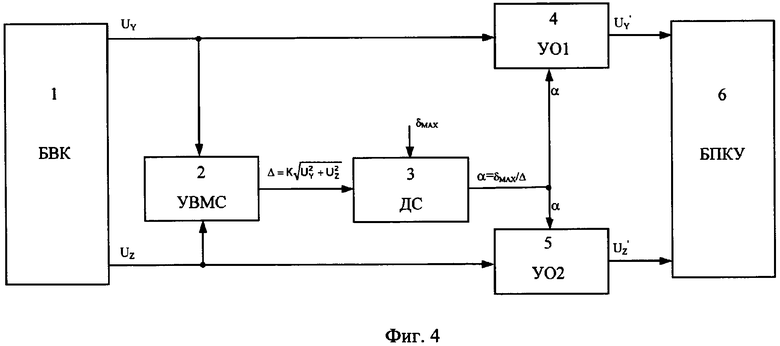
Блок-схема предложенной системы управления представлена на фиг.4, где приняты обозначения: 1 - блок выработки команд управления ракетой (БВК), 2 - устройство вычисления модуля сигнала (УВМС), 3 - делитель сигналов (ДС), 4 и 5 - первый и второй усилители-ограничители (УO1 и УO2), 6 - блок перераспределения команд управления в зависимости от угла крена между каналами управления (БПКУ). Работа системы управления заключается в следующем.
Устройство вычисления модуля сигнала 2, реализованное в форме многофункциональной схемы на операционных усилителях 153УД4 (см. А.Г.Алексеенко, Е.А.Коломбет, Г.И.Стародуб. "Применение прецезионных аналоговых микросхем." - М.: Радио и связь, 1985, рис.240, стр.114), вырабатывает сигнал модуля команды управления  . Отклонение рулей ракеты ограничено величиной δMAX, сигнал с выхода устройства вычисления модуля сигнала Δ и сигнал δMAX подаются на делитель сигналов 3, который вычисляет отношение α=δMAX/Δ, сигнал α поступает на управляющие входы первого и второго усилителей-ограничителей 4 и 5, реализованных на операционных усилителях 140УД7 (см. А.Г.Алексеенко, Е.А.Коломбет, Г.И.Стародуб. "Применение прецезионных аналоговых микросхем." - М.: Радио и связь, 1985, стр.179-180). Усилители-ограничители 4 и 5 осуществляют преобразование команд управления ракетой в соответствии с формулами (5) и обеспечивают ограничение модуля команд управления.
. Отклонение рулей ракеты ограничено величиной δMAX, сигнал с выхода устройства вычисления модуля сигнала Δ и сигнал δMAX подаются на делитель сигналов 3, который вычисляет отношение α=δMAX/Δ, сигнал α поступает на управляющие входы первого и второго усилителей-ограничителей 4 и 5, реализованных на операционных усилителях 140УД7 (см. А.Г.Алексеенко, Е.А.Коломбет, Г.И.Стародуб. "Применение прецезионных аналоговых микросхем." - М.: Радио и связь, 1985, стр.179-180). Усилители-ограничители 4 и 5 осуществляют преобразование команд управления ракетой в соответствии с формулами (5) и обеспечивают ограничение модуля команд управления.
Таким образом, система управления обеспечивает реализацию предложенного способа управления и повышает точность наведения ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2011 |
|
RU2475428C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОДНОКАНАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ (ВАРИАНТЫ) | 1995 |
|
RU2111522C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ С АЭРОДИНАМИЧЕСКИМИ РУЛЯМИ | 2000 |
|
RU2182306C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТЫ, СИСТЕМА НАВЕДЕНИЯ И ПОЗИЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406962C2 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
Изобретение относится к области приборостроения и предназначается для использования в системах управления ракетами. Технический результат - повышение точности системы управления. Для достижения данного результата в зависимости от угла крена между каналами управления с момента начала управления определяют модуль команды управления ракетой и коэффициент отношения максимального угла отклонения рулей ракеты к модулю команды. Если модуль команды превышает величину максимального отклонения рулей, то уменьшают команды управления ракетой пропорционально коэффициенту α. В системе управления двухканальной вращающейся ракетой между каналами управления введены устройство вычисления модуля сигнала, делитель сигналов и первый и второй усилители-ограничители. При этом первый и второй входы устройства вычисления модуля сигнала соединены с выходами блока выработки команд управления ракетой. 2 н.п. ф-лы, 4 ил.
где К - коэффициент передачи рулевого привода, и отношение максимального угла отклонения рулей ракеты δMAX к модулю команды δMAX/Δ=α, после чего, если модуль команды превышает величину максимального отклонения рулей Δ>δMAX, то уменьшают команды управления ракетой UY и UZ пропорционально коэффициенту α.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Техническое описание | |||
| - М.: Военное издательство Министерства обороны СССР, 1981, с.12-17 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| Шипунов А., Дудка В., Образумов В."Тунгуска" становится эффективнее" | |||
| - Военный парад, 2001, №6, с.38-41 | |||
| Лебедев А.А., Карабанов В.А | |||
| Динамика систем управления | |||

