Предлагаемое изобретение относится к системам наведения ракет, использующих метод пропорциональной навигации или его модификации («Динамическое проектирование систем управления автоматических маневренных летальных аппаратов»/ Е.А.Федосов, В.Т.Бобронников, М.Н.Красильщиков, В.И.Кухтенко и др.; Под ред. Е.А.Федосова. - М.: Машиностроение, 1997, с.308; 312-313).
Известен способ формирования сигнала компенсации влияния продольного ускорения ракеты на точность наведения, в котором для формирования сигнала компенсации используют измерения текущих значений проекций продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения  нормальных к линии визирования («Проектирование зенитных управляемых ракет» / И.И. Архангельский, П.П. Афанасьев, Е.Г. Болотов и др. / Под ред. И.С.Голубева и В.Г. Светлова. - Изд. Второе, перераб. и доп. - М.: Изд-во МАИ, 2001, с.337-339; 344). Этот способ взят в качестве прототипа.
нормальных к линии визирования («Проектирование зенитных управляемых ракет» / И.И. Архангельский, П.П. Афанасьев, Е.Г. Болотов и др. / Под ред. И.С.Голубева и В.Г. Светлова. - Изд. Второе, перераб. и доп. - М.: Изд-во МАИ, 2001, с.337-339; 344). Этот способ взят в качестве прототипа.
Недостатком указанного способа является снижение точности наведения для ракет с резким спадом тяги в момент окончания работы двигателя (за время менее 1,5-2 с), что в свою очередь приводит к скачку продольной перегрузки ракеты (более 7-10 ед.). В этом случае промах может возрасти в 1,5-2 раза. Причиной повышенного промаха является инерционность контура управления, которая приводит к запаздыванию при отработке сигналов компенсации продольной перегрузки.
Целью данного изобретения является повышение точности наведения за счет уменьшения влияния продольного ускорения ракеты на точность наведения при использовании метода пропорциональной навигации или его модификаций.
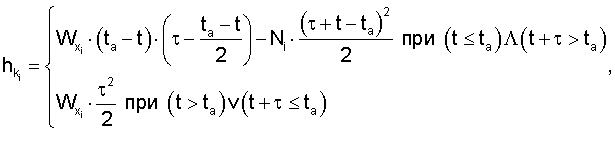
Поставленная цель достигается тем, что до формирования сигналов управления ракетой задают время работы двигателя ta, задают априорную оценку проекций продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения после окончания работы двигателя Ni, измеряют текущее время полета t, определяют время до встречи с целью τ, определяют оценку промаха из-за продольного ускорения ракеты при (t≤ta)∧(t+τ>ta)

в остальных случаях
формируют проекции сигналов компенсации продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения, добавляемые к основным сигналам управления по методу пропорциональной навигации или его модификациям
В этом способе сигнал компенсации продольного ускорения ракеты формируется пропорциональным оценке будущего промаха, вызванного продольным ускорением ракеты. Для характерного профиля продольного ускорения ракеты, представленного на фиг.1, оценка промаха имеет вид:
где  - проекции измеренного продольного ускорения на оси антенной системы координат (i=YA; ZA);
- проекции измеренного продольного ускорения на оси антенной системы координат (i=YA; ZA);
Ni - проекции априорной оценки продольного ускорения на оси антенной системы координат (i=YA; ZA);
t - текущее время;
ta - время работы двигателя;
τ - время, оставшееся до точки встречи;
∨ - логическое «и»;
∧ - логическое «или».
Сигнал компенсации влияния продольного ускорения определяют следующим образом:
где Кн - навигационная постоянная.
Полученный сигнал компенсации суммируется с сигналом управления ракетой по методу пропорциональной навигации или его модификациям  :
:
На фиг.2 приведено сравнение интегральных законов распределения вероятности промахов при наведении в характерную точку зоны поражения для прототипа и предлагаемого способа, полученных с помощью моделирования на имитационной математической модели. Точность наведения в рассматриваемых условиях в случае использования предлагаемого способа в два раза выше, чем у прототипа. Это достигается за счет упреждающего учета влияния продольного ускорения ракеты на промах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ НА УЧАСТКЕ ВОЗРАСТАНИЯ СКОРОСТНОГО НАПОРА | 2006 |
|
RU2331839C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2023 |
|
RU2804765C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ САМОНАВЕДЕНИЯ НА НАЗЕМНУЮ ЦЕЛЬ | 2018 |
|
RU2714531C1 |
| Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления | 2015 |
|
RU2613016C1 |
Изобретение относится к системам наведения управляемых ракет. Технический результат - повышение точности наведения. Сущность изобретения заключается в том, что до формирования сигналов управления ракетой задают время работы двигателя, задают априорную оценку проекций вектора продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения. После окончания работы двигателя измеряют текущее время полета, определяют время до встречи с целью и определяют оценку промаха из-за продольного ускорения ракеты. Сигнал компенсации продольного ускорения формируют пропорциональным оценке промаха, вызванного продольным ускорением ракеты. Полученный сигнал компенсации суммируется с сигналом управления ракетой по методу пропорциональной навигации или его модификациям. 2 ил.
Способ формирования сигналов управления ракетой, включающий измерение проекций вектора продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения  нормальные к линии визирования цели, формирование сигналов управления ракетой по методу пропорциональной навигации или его модификациям с навигационной постоянной Кн, формирование проекций вектора компенсации влияния продольного ускорения
нормальные к линии визирования цели, формирование сигналов управления ракетой по методу пропорциональной навигации или его модификациям с навигационной постоянной Кн, формирование проекций вектора компенсации влияния продольного ускорения  на измерительные оси антенной системы координат, суммирование проекций вектора компенсации с основными сигналами управления, отличающийся тем, что для компенсации влияния продольного ускорения ракеты на точность наведения до формирования сигналов управления ракетой задают время работы двигателя ta, задают априорную оценку проекций вектора продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения после окончания работы двигателя Ni, измеряют текущее время полета t, определяют время до встречи с целью τ, определяют оценку промаха из-за влияния продольного ускорения ракеты по математическим выражениям:
на измерительные оси антенной системы координат, суммирование проекций вектора компенсации с основными сигналами управления, отличающийся тем, что для компенсации влияния продольного ускорения ракеты на точность наведения до формирования сигналов управления ракетой задают время работы двигателя ta, задают априорную оценку проекций вектора продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения после окончания работы двигателя Ni, измеряют текущее время полета t, определяют время до встречи с целью τ, определяют оценку промаха из-за влияния продольного ускорения ракеты по математическим выражениям:
при (t≤ta)∧(t+τ>ta)

в остальных случаях
формируют проекции вектора компенсации продольного ускорения ракеты на измерительные оси антенной системы координат головки самонаведения, добавляемые к основным сигналам управления по методу пропорциональной навигации или его модификациям по математическим выражениям:
| Проектирование зенитных управляемых ракет | |||
| Под ред | |||
| Голубева И.С | |||
| и Светлова В.Г | |||
| - М.: Изд-во МАИ, 2001, с.337-339, 344 | |||
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| DE 3338191 A1, 04.02.1988 | |||
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| US 4898341 A, 06.02.1990 | |||
| US 4381090 A, 26.04.1983. | |||

