Изобретение относится к системам наведения летательных аппаратов на воздушный объект и предназначено для перехвата воздушного объекта на больших дальностях, в том числе интенсивно маневрирующего.
Рассмотрим вариант наведения летательного аппарата (ЛА) на воздушный объект с помощью комбинированной системы наведения. Необходимо отметить, что один из известных способов комбинированного наведения, работающий в четырех режимах: целеуказания (ЦУ), автономного наведения, радиокомандного наведения и самонаведения [2]. Рассмотрим работу данного способа комбинированного наведения в этих режимах.
В автономном режиме работы радиоэлектронная система управления (РЭСУ), имеющая место в ситуациях, когда дальность пуска (Дп) незначительно превышает дальность захвата (Дз) цели радиолокационной головкой самонаведения (РГС), обычно используется метод пропорционального наведения. При этом оценки, необходимые для его реализации, формируются в вычислителе путем решения тех или иных кинематических уравнений, которые определяют взаимное положение воздушного объекта и ЛА как материальных точек. Эти уравнения решаются на основе обработки результатов измерения ускорения ЛА в продольном направлении и в поперечных плоскостях управления при условии, что соблюдается вполне определенная гипотеза движения воздушного объектов (например, с постоянной скоростью) по состоянию на момент пуска. В результате такого наведения ЛА должен быть выведен в зону уверенного захвата воздушного объекта.
Для уменьшения ошибок наведения при маневрах воздушного объекта на автономных участках большой протяженности используется режим командного наведения. В этом режиме из бортовой аппаратуры в РГС поступают сигналы радиокоррекции (РК). В качестве сигнала радиокоррекции периодически передают закодированное значение ошибок наведения по положению и производные этих ошибок по времени. На основе раскодированных сигналов РК траектория ЛА корректируется таким образом, что воздушный объект не выходит за пределы зоны захвата РГС. После того как ЛА приблизилась к воздушному объекту на расстояние Д≤Дз, включается РГС, воздушный объект берется на автоматическое сопровождение и начинается этап самонаведения. В этом режиме обычно используется метод пропорционального наведения со смещением, а основным поставщиком информации для него является РГС [1, с. 23-29].
Режим ЦУ в комбинированных РЭСУ ЛА имеет то же предназначение, что и в системах самонаведения (СН). Отличие состоит лишь в наличии дополнительных команд, используемых в качестве начальных условий для решения кинематических уравнений, которые используются для экстраполяции пространственного положения и скорости воздушного объекта в автономном и радиокомандном режимах.
Однако данный способ обладает недостатком: если Дп>>Дз, то за время длительного автономного наведения воздушный объект может начать маневрировать, изменив тем самым закон своего первоначального движения. Поскольку эти изменения не учитывались в информационно-вычислительных системах (ИВС) автономной системы, то это может привести к ошибкам наведения, при которых воздушный объект может не попасть в зону ее захвата РГС. Применение режима РК не в полной мере позволяет обеспечить уменьшение ошибок наведения при маневре воздушного объекта, особенно при совершении им маневра с высокими показателями перегрузки (более 3 единиц), при этом эффективная дальность наведения значительно уменьшается.
Известен также способ управления ЛА с головками самонаведения, траектории полета которого предполагают три участка: баллистический участок, участок полета с постоянным углом наклона продольной оси к горизонту (участок планирования) и участок самонаведения [3]. Результатом данного способа является уменьшение на участке планирования технического рассеивания ЛА, возникающего к концу баллистического участка полета, за счет сведения траектории планирования к кинематической до момента начала самонаведения. Сущность изобретения заключается в ограничении углов отклонения элементов управления ЛА (например, аэродинамических рулей), что, в свою очередь, обеспечивается за счет ограничения входного сигнала на рулевой привод на участке планирования. При этом уровень сигнала на рулевой привод определяется значением управляющего сигнала, требуемого для движения ЛА по опорной траектории, лежащей ниже реальных траекторий.
Способ обладает тем недостатком, что при движении ЛА на баллистическом участке и участке планирования не рассматривается маневр объекта. Соответственно в ИВС не учитываются изменения траектории движения объекта, что приводит к ошибкам наведения на первых двух участках траектории полета.
Способ комбинированного наведения (СКН) предназначен для реализации способов наведения, обеспечивающих перехват воздушных объектов в широком диапазоне дальностей и существенно превышающих дальности действия ЛА с теленаведением (ТН) и самонаведением. При этом СКН позволяет достичь высоких показателей точности перехвата маневрирующих воздушных объектов, помехозащищенности ИВС ЛА, а также практически реализовать принцип «пуск-перехват». Изобретение позволяет осуществить способ комбинации радиокомандного на начальном участке полета ЛА (в ближней зоне) и радиолокационного или оптического самонаведения на конечном участке (в дальней зоне).
Предлагаемое техническое решение поясняется чертежами, на которых показаны взаимное расположение и связи элементов предлагаемой системы комбинированного наведения летательного аппарата и приняты следующие обозначения (фиг. 1):
1 - наземный борт,
2 - формирователь начальных условий,
3 - формирователь упреждений,
4 - умножитель,
5 - командная радиолиния управления (КРЛУ),
6 - блок выработки полетного задания,
7 - фильтр оценок,
8 - схема контроля промаха,
9 - схема контроля скорости изменения промаха,
10 - коммутатор,
11 - «Автопилот - летательный аппарат» (АП-ЛА),
12 - устройство сопряжения,
13 - канал демпфирования летательного аппарата,
14 - бортовой координатор воздушного объекта (БКВО),
15 - ключ «теленаведения/самонаведения» (ТН/СН),
16 - оптимальный фильтр,
17 - оптимальный регулятор,
18 - селектор ложных тепловых воздушных объектов (ЛТВО),
19 - датчик линейных ускорений (ДЛУ),
20 - фильтр сопровождения,
21 - сумматор,
22 - кинематическое звено,
23 - преобразователь.
Основной задачей изобретения является повышение эффективности системы комбинированного наведения. Техническая реализация повысит точность наведения летательного аппарата для перехвата на больших дальностях, в том числе интенсивно маневрирующего воздушного объекта.
Комбинированное наведение реализуется при функционировании ИВС в трех режимах: целеуказания, радиокомандного наведения (РКН) и самонаведения. При этом применяемые методы наведения и алгоритмы управления обеспечивают всеракурсный перехват воздушного объекта независимо от режима работы, а алгоритмы функционирования ИВС робастны к смене режимов.
В радиокомандном режиме функционирования ИВС в ситуациях, когда относительная дальность автономного наведения значительно превышает дальность захвата воздушного объекта головкой самонаведения (ГСН), целесообразно применять метод оптимального наведения. В этом случае обеспечивается сопряжение кинематических траекторий участков радиокомандного и самонаведения. Применением метода оптимального (квазиоптимального) траекторного управления возможно достичь режима наведения, близкого к режиму параллельного сближения, и тем самым обеспечить наилучшие условия углового прицеливания ГСН, т.е. прицеливания практически по «неподвижному» воздушному объекту в относительном движении. Это позволяет значительно уменьшить ошибки захвата воздушного объекта следящим угломерным координатором, обеспечить переход от радиокомандного наведения к автономному сопровождению воздушного объекта в режиме самонаведения без существенных переходных процессов и предотвратить появление больших ошибок слежения при интенсивном маневрировании воздушного объекта, особенно на малых дальностях, в районе встречи ЛА с воздушным объектом.
В режиме радиокомандного наведения необходимые информационные параметры траекторного управления формируются на наземном пункте управления путем реализации оптимальных алгоритмов траекторного управления [5, 138-162].
При достижении ЛА дальности до воздушного объекта, при которой происходит разрешение воздушного объекта по углам, дальности и скорости ее изменения, осуществляется захват воздушного объекта ГСН с последующим переходом на ее автосопровождение по всем доступным для ГСН фазовым координатам.
С этого момента начинается этап самонаведения. В результате информационного контакта с воздушным объектом на входе ИВС присутствует сигнал от него, несущий всю доступную информацию о его фазовых координатах. Каналы оценивания координат и параметров движения воздушного объекта на основе информации, извлекаемой из сигнала от воздушного объекта (в радио- или оптическом диапазонах), непрерывно формируют оценки требуемых информационных параметров траекторного управления, необходимых для реализации выбранного метода наведения [4, с. 186-196].
Основной задачей режима ЦУ является обеспечение необходимой информацией ИВС наземного пункта управления (НПУ) для формирования полетного задания (ПЗ). В состав ПЗ входят параметры начальных условий для решения кинематических уравнений, которые используются в бортовой ИВС для экстраполяции параметров траекторного управления, а также служебные команды ЦУ, необходимые для обеспечения подготовки к пуску и пуска ЛА. Режим ЦУ имеет место в процессе совместного функционирования систем и аппаратуры НПУ на интервале времени от получения, обработки информации о выбранном для обстрела воздушном объекте и до пуска ЛА. Команды ЦУ начинают поступать в ИВС ЛА только после взятия воздушного объекта на автоматическое сопровождение средствами сопровождения (радиолокационные станции (РЛС) и оптико-электронные станции (ОЭС)) и окончания формирования ПЗ. По информации ПЗ осуществляются наведение антенны радиолокационной ГСН (чувствительного элемента оптической ГСН) по угловым координатам в требуемом направлении, «заряжание» фильтров сопровождения и экстраполяторов «начальными условиями», а также реализация необходимых служебных команд, обеспечивающих функционирование ИВС ЛА при автономном наведении.
Перечень фигур чертежей.
Фиг. 1 - Структура контура наведения, реализующая способ оптимального параллельного комбинированного наведения «ТН+СН».
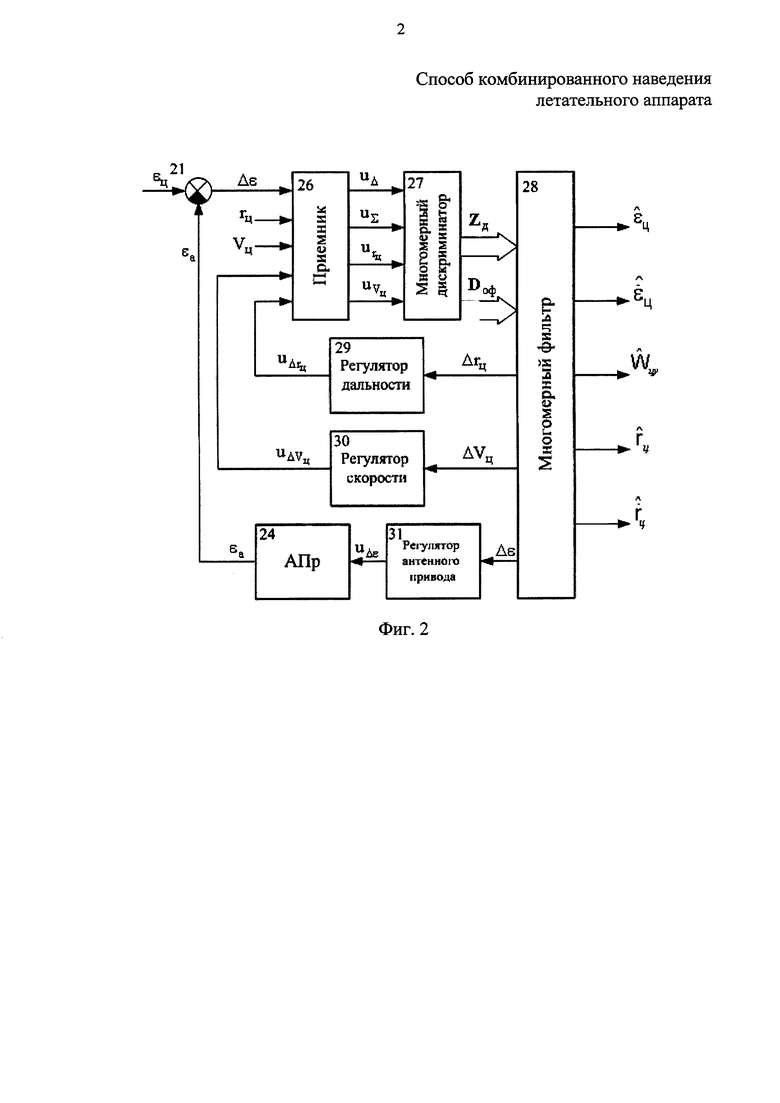
Фиг. 2 - Обобщенная структурная схема комплексного координатора воздушного объекта РЛС сопровождения.
Фиг. 3 - Обобщенная структурная схема вычислителя кинематических параметров относительного движения.
Фиг. 4 - Обобщенная структурная схема формирователя полетного задания.
Фиг. 5 - Структурная схема оптимального регулятора с компенсацией динамической ошибки.
Фиг. 6 - Структурная схема оптимального контура самонаведения.
Рассмотрим алгоритмы работы способа комбинированного наведения в различных режимах:
1. Алгоритмы работы способа комбинированного наведения в режиме целеуказания
В СКН задачи, решаемые в режиме ЦУ, реализуются информационно-управляющей системой (ИУС) наземного пункта управления в составе измерительных средств радиотехнических или в комплексе с оптико-электронными, вычислительными средствами и средствами управления.
В качестве измерительных радиотехнических средств наиболее широкое распространение получили импульсно-доплеровские РЛС с квазинепрерывным сигналом подсвета воздушного объекта (ИД РЛС КНПС), позволяющие:
измерять в угломерном канале с моноимпульсным (моноконическим) пеленгатором угловые координаты εц, βц с одновременным формированием в многомерном фильтре (ММФ) сопровождения (фильтре в контуре сопровождения) оптимальных оценок фазовых координат 





измерять в дальномерном канале с одновременным оцениванием координаты 

На структурной схеме (фиг. 2): uΔ, u∑ - разностные и суммарные сигналы на выходе устройства суммарно-разностной обработки (УСРО) приемника; 




21 - сумматор,
24 - антенный привод (АПр),
26 - приемник,
27 - многомерный дискриминатор,
28 - многомерный фильтр,
29 - регулятор дальности,
30 - регулятор скорости,
31 - регулятор антенного привода.
Структура комплексного координатора воздушного объекта (ККВО) включает три контура сопровождения - по угловым координатам εц (βц), дальности ru и скорости Vц. Каждый контур представляет собой следящую систему с многомерным оптимальным фильтром, формирующим оценки фазовых координат для внешнего потребления
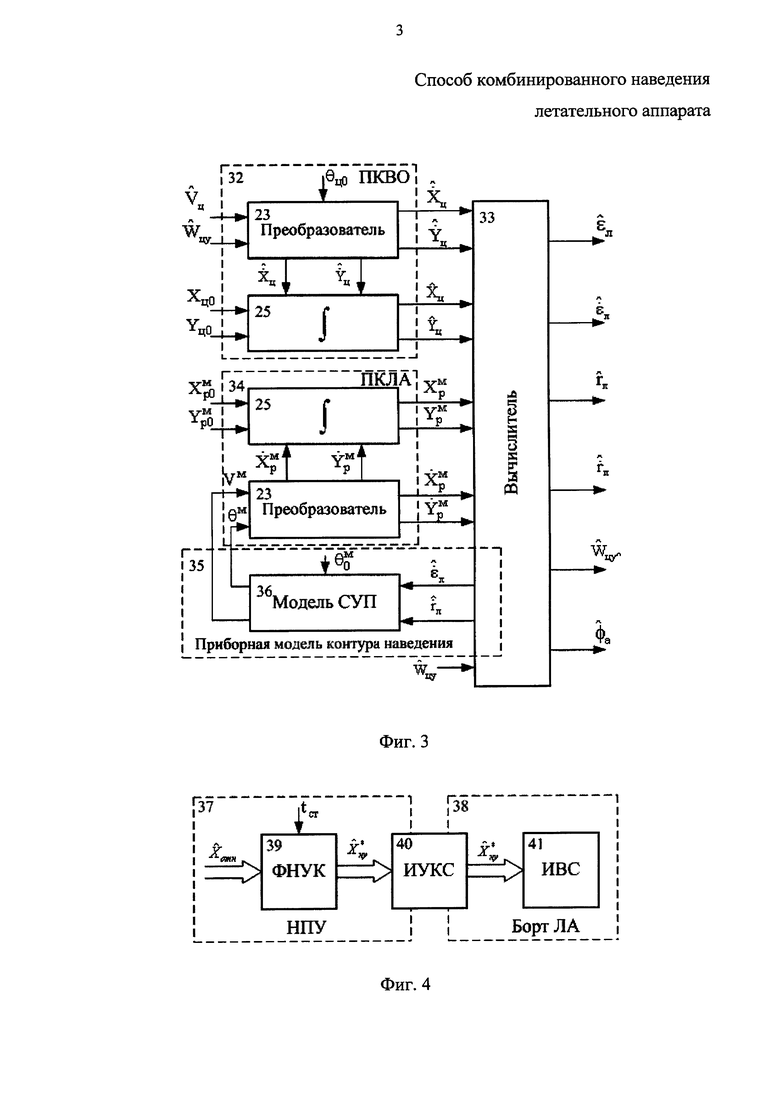
Вычислительные средства в составе вычислителя кинематических параметров относительного движения «ЛА - воздушный объект» (ВКПОД) и формирователя полетного задания (ФПЗ) формируют полетное задание для реализации его в бортовой ИВС ЛА в режимах ЦУ и радиокоррекции (РКН).
В ВКПОД решаются кинематические уравнения относительного движения «ЛА - воздушный объект» с входящими в их правые части векторами 


На структурной схеме (фиг. 3):
23 - преобразователь,
25 - интегратор,
32 - преобразователь координат воздушного объекта (ПКВО),
33 - вычислитель,
34 - преобразователь координат летательного аппарата (ПКЛА),
35 - приборная модель контура наведения,
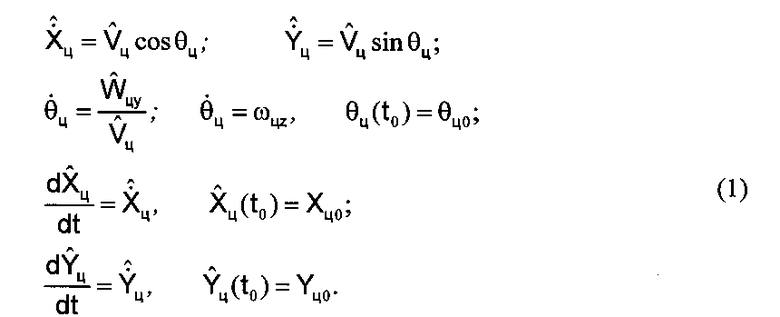
36 - модель системы управления полетом (СУП) ЛА, координаты с индексом «м» - модельные (приборные) координаты. Ниже приводится алгоритм функционирования ВКПОД на временном интервале t0<t<tсн, где t0 - момент взятия воздушного объекта на автосопровождение, tсн - момент перехода СКН в режим самонаведения.
Формализованная математическая модель функционирования ВКПОД [4, с. 301-305].
1. Преобразователь координат воздушного объекта:
2. Преобразователь координат ЛА:
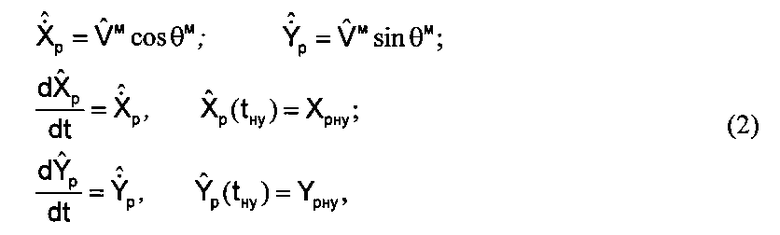
где tну - время начала управляемого полета ЛА.
3. Вычислитель:
4. Модель СУП:

 ϑм(0)=θст,
ϑм(0)=θст,
где N - постоянная навигации;
кр, Тр, ξр - параметры передаточной функции колебательного звена - аппроксимации динамики стабилизированной системы «автопилот - ЛА»;
TV - аэродинамическая постоянная;
tст, tм, tк - время старта, начала маршевого участка и окончания полета ЛА соответственно.
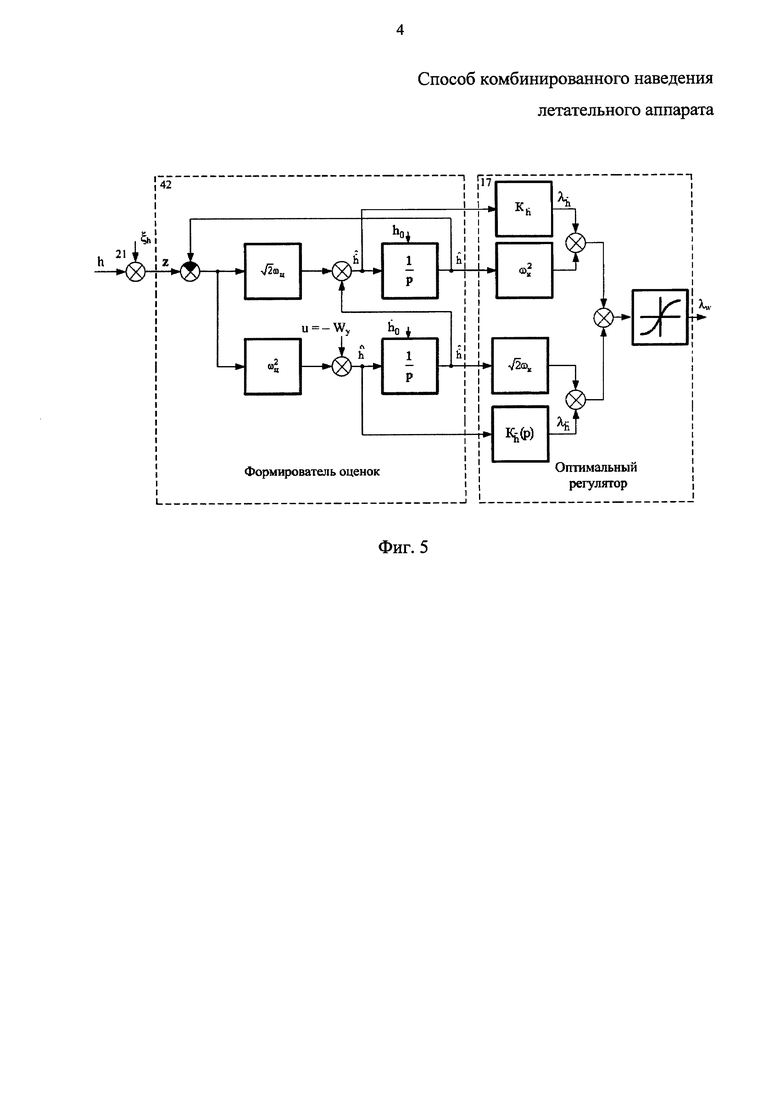
Формирователь полетного задания по данным от ВКПОД формирует: вектор начальных условий для «заряжания» вычислителя бортовой ИВС в виде набора фазовых координат 
начальное значение задающего воздействия 
текущие значения 


На структурной схеме функционирования ФПЗ (фиг. 4):
37 - наземный пункт управления (НПУ),
38 - борт летательного аппарата (Борт ЛА),
39 - формирователь начальных условий и коррекции (ФНУК),
40 - информационно-управляющий канал сопряжения (ИУКС),
41 - информационно-вычислительная система (ИВС).
2. Алгоритмы работы способа комбинированного наведения в режиме теленаведении [5, с. 281-284]
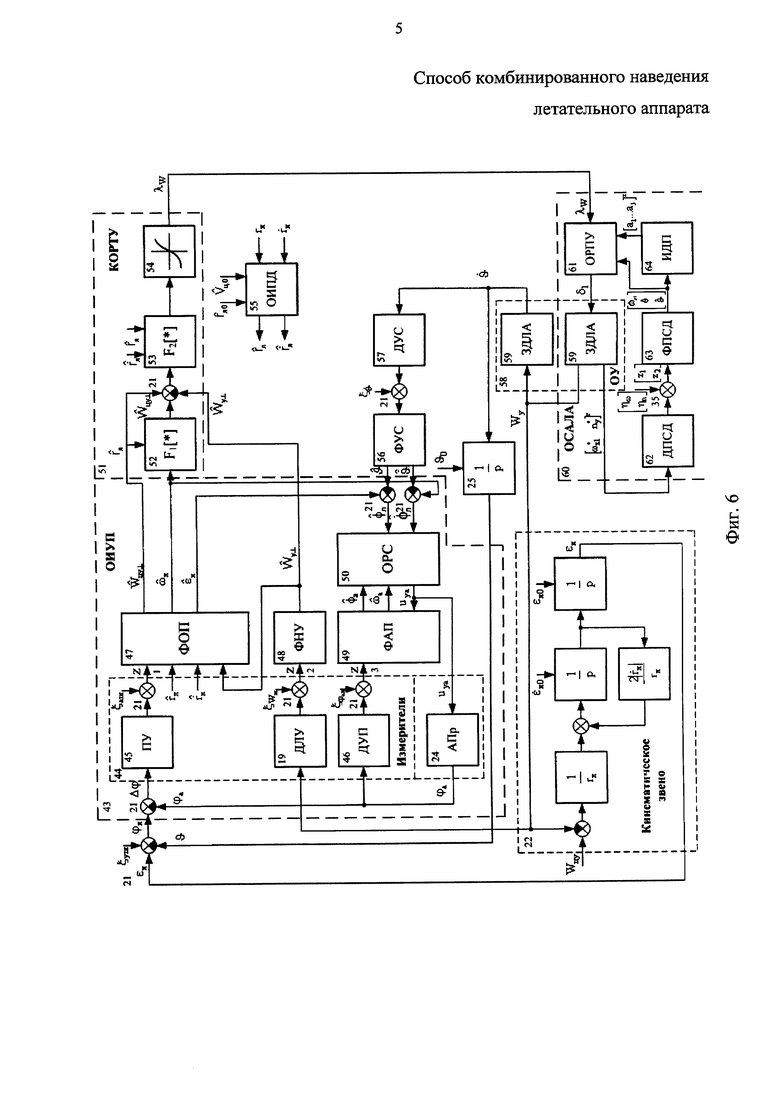
В режиме теленаведения реализуется структурной схемой оптимального регулятора системы траекторного управления (фиг.5). На структурной схеме:
17 - оптимальный регулятор,
21 - сумматор,
42 - формирователь оценок.
Решение задачи оптимального управления имеет вид двумерного фильтра:

где 


где ωк имеет смысл полосы пропускания контура наведения, q - показатель степени, определяющий вид нелинейности, 

Для уменьшения динамической ошибки можно использовать команды компенсации по первой и второй производным от h:

где
Более высокую точность наведения, особенно на интенсивно маневрирующий воздушный объект, можно достигнуть при увеличении порядка модели до третьего. Это объясняется тем, что более высокие производные лучше аппроксимируются некоррелированным шумовым процессом. Кроме того, повышение порядка модели дает возможность получить оптимальные оценки вторых производных параметра управления (ошибок наведения).
3. Алгоритмы работы способа комбинированного наведения в режиме самонаведения
Процесс наведения ЛА на воздушный объект описывается системой дифференциальных уравнений, представляющей собой формализованную математическую модель (ФММ), получившую распространенное название контура наведения [4, с. 306-308].
Контур самонаведения с оптимальными управлениями в своем составе включает следующие ФММ:
кинематические уравнения относительного движения воздушного объекта и ЛА;
ИВС в составе оптимальных измерителей угловых параметров, относительной дальности и ее производных, а также оптимального регулятора траекторного управления;
оптимальной системы «автопилот - ЛА» в составе модели звена динамики ЛА, оптимального измерителя параметров собственного движения ЛА, идентификатора динамических параметров ЛА, оптимального регулятора пилотажного управления.
Контур наведения составлен на основе формализованных математических моделей.
1. Кинематического звена.
2. Оптимального измерителя угловых параметров.
3. Квазиоптимального регулятора траекторного управления (КОРТУ) в виде аппроксимированного выражения:

где 





4. Оптимальной системы «автопилот - ЛА» (ОСАЛА).
5. Оптимального измерителя относительной дальности и ее производных (ОИПД).
На структурной схеме оптимального контура самонаведения представлены следующие элементы (фиг. 6):
19 - датчик линейных ускорений (ДЛУ),
21 - сумматор,
22 - кинематическое звено,
24 - антенный привод (АПр),
25 - интегратор,
43 - оптимальный измеритель угловых параметров,
44 - измерители,
45 - пеленгационное устройство (ПУ),
46 - датчик углового положения (ДУЛ),
47 - фильтр отслеживаемого процесса (ФОП),
48 - фильтр нормального ускорения (ФНУ),
49 - фильтр антенного привода (ФАП),
50 - оптимального регулятора сопровождения (ОРС),
51 - квазиоптимальный регулятор траекторного управления (КОРТУ),
52 - функциональный преобразователь угловой скорости линии визирования воздушного объекта,
53 - формирователь команды управления,
54 - функциональный преобразователь со степенной характеристикой,
55 - относительный измеритель относительной дальности и ее производных (ОИПД),
56 - фильтр угловых скоростей (ФУС)
57 - датчик угловой скорости (ДУС),
58 - объект управления (ОУ),
59 - звено динамики летательного аппарата (ЗДЛА),
60 - оптимальная система «автопилот - летательный аппарат» (ОСАЛА),
61 - оптимальный регулятор пилотажного управления (ОРПУ),
62 - датчик параметров собственного движения (ДПСД),
63 - фильтр параметров собственного движения (ФПСД),
64 - идентификатор динамических параметров (ИДП).
Анализ структурной схемы контура самонаведения (фиг. 6) позволяет отметить следующие особенности оптимальной системы самонаведения: система представляет собой многомерную, нестационарную и многоконтурную сложную систему.
Многомерность в основном определяется размерностью оптимальных фильтров ИВС и автопилота.
Нестационарность системы обусловлена нестационарностью кинематического звена, оптимальных фильтров ИВС и автопилота, а также структурой регуляторов траекторного и пилотажного управлений.
Многоконтурность - наличием контуров наведения и сопровождения по угловым координатам и дальности, образованных цепями формирования невязок в оптимальных фильтрах ИВС и автопилота, а также обратных связей в регуляторах траекторного и пилотажного управлений. Многоконтурность дает возможность одновременно обеспечить высокую точность, устойчивость и помехозащищенность контуров сопровождения воздушного объекта, в том числе и интенсивно маневрирующего, по углам и дальности, а также контура наведения летательного аппарата.
В оптимальной системе самонаведения пропорциональное сближение реализуется согласно методу расширенной пропорциональной навигации с квазиоптимальным нелинейным управлением, позволяющему обеспечить высокую точность перехвата интенсивно маневрирующего воздушного объекта. Ранее было отмечено о фактах квазиоптимальности алгоритмов ИВС, что позволяет судить об условной оптимальности - квазиоптимальности рассматриваемого варианта системы самонаведения. «Степень условности» можно оценить путем исследования динамики самонаведения методом имитационного моделирования.
Источники информации
1. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Издание второе, дополненное и переработанное. Т.2. Радиоэлектронные системы самонаведения/ Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника, 2003. - 389 с.
2. Меркулов В.И., Канащенков А.И., Чернов В.С. и др. Авиационные системы радиоуправления. Издание второе, дополненное и переработанное. Т.3. Системы командного радиоуправления. Автономные и комбинированные системы наведения / Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника, 2004. - 320 с. (с. 185-187, прототип).
3. Патент РФ №2124688 F41G 7/00. Способ комбинированного управления летательным аппаратом. Тихонов В.П., Бабичев В.И., Журавлев С.Д., Гудков Н.В., Лагун В.В. Опубликован 10.01.1999 г. (аналог).
4. Хуторской И.Н., Жарков С.В., Финогенов С.Н. и др. Системы самонаведения зенитных ракет. Смоленск: ОАО «Алина», 2006. - 324.
5. Хуторской И.Н., Финогенов С.Н. Системы наведения зенитных ракет с оптимальным управлением. Смоленск, Изд-во ВА ВПВО ВС РФ, 2009. - 317 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственная имитационная модель системы управления автоматическим маневренным летательным аппаратом | 2019 |
|
RU2735418C2 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСТРЕБИТЕЛЕМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ ЕГО БЛИЖНЕМ НАВЕДЕНИИ НА ГРУППОВУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2015 |
|
RU2593911C1 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ ПЕРЕХВАТА ПРИОРИТЕТНОЙ ЦЕЛИ, ОБЕСПЕЧИВАЮЩИЙ СРЫВ НАВЕДЕНИЯ ИСТРЕБИТЕЛЕЙ СОПРОВОЖДЕНИЯ | 2020 |
|
RU2742737C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
Изобретение относится к системам наведения летательных аппаратов (ЛА) на воздушный объект и предназначено для перехвата воздушного объекта на больших дальностях, в том числе интенсивно маневрирующего. Технический результат - расширение функциональных возможностей. Для этого комбинированное наведение ЛА реализуется при функционировании информационно-вычислительной системы (ИВС) в трех режимах: целеуказания, радиокомандного наведения (РКН) и самонаведения. При этом обеспечивают всеракурсный перехват воздушного объекта независимо от режима работы, а алгоритмы функционирования ИВС робастны к смене режимов. Для этого использованы оптимальные алгоритмы траекторного управления ЛА в режимах теле- и самонаведения, синтезированные на основе применения системного анализа и методов теории автоматического управления, теории систем наведения ЛА, теории оценивания, теории стохастического оптимального управления, математического аппарата решения дифференциальных уравнений, векторного анализа и матричной алгебры. 6 ил.
Способ комбинированного наведения летательного аппарата, включающий комбинацию радиокомандного на начальном участке полета летательного аппарата (в ближней зоне) и радиолокационного или оптического самонаведения на конечном участке (в дальней зоне), отличающийся тем, что величина команды управления на выходе устройства выработки команд на этапе радиокомандного наведения рассчитывается в соответствии с зависимостью

где ωк имеет смысл полосы пропускания контура наведения, q - показатель степени, определяющий вид нелинейности, - линейная ошибка наведения,  - оценка скорости изменения линейной ошибки наведения;
- оценка скорости изменения линейной ошибки наведения;
а на этапе самонаведения - в соответствии с выражением

где  - оценка относительной дальности «летательный аппарат - воздушный объект»,
- оценка относительной дальности «летательный аппарат - воздушный объект»,  - оценка скорости сближения летательного аппарата с воздушным объектом,
- оценка скорости сближения летательного аппарата с воздушным объектом,  Tv - аэродинамическая постоянная, Кλ - назначаемый коэффициент,
Tv - аэродинамическая постоянная, Кλ - назначаемый коэффициент,  - оценка угловой скорости линии визирования «летательный аппарат - воздушный объект», q - показатель степени, определяющий вид нелинейности, h - оценка линейной ошибки наведения,
- оценка угловой скорости линии визирования «летательный аппарат - воздушный объект», q - показатель степени, определяющий вид нелинейности, h - оценка линейной ошибки наведения,  - оценки трансверсальных ускорений летательного аппарата и воздушного объекта.
- оценки трансверсальных ускорений летательного аппарата и воздушного объекта.
| МЕРКУЛОВ В.И., КАНАЩЕНКОВ А.И., ЧЕРНОВ В.С | |||
| И ДР | |||
| Авиационные системы радиоуправления | |||
| Издание второе, дополненное и переработанное | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Системы командного радиоуправления | |||
| Автономные и комбинированные системы наведения / Под ред | |||
| А.И | |||
| КАНАЩЕНКОВА и В.И | |||
| МЕРКУЛОВА | |||
| М.: Радиотехника, 2004 | |||
| - с | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| US 4898341 А1, 06.02.1990 | |||
| СПОСОБ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ С ПОЛИМЕРНЫМ ПОКРЫТИЕМ | 1997 |
|
RU2126322C1 |

