Изобретение относится к области управления летательными аппаратами и может быть использовано для наведения на наземную цель по ее радиоизлучению.
Известные способы самонаведения летательного аппарата на наземный источник радиоизлучения - цель основываются на двухмерном пеленговании.
Известен способ прямого наведения на неподвижную цель, в соответствии с которым, на летательном аппарате пеленгуют цель по ее радиоизлучению с измерением углов ориентации линии визирования в плоскостях управления по курсу и тангажу, результаты измерения, как параметры рассогласования, компенсируют при управлении полетом, выполняя поворот в сторону цели и совмещая в течение всего времени самонаведения ось летательного аппарата с линией визирования. Пеленгаторная антенная система при этом жестко скреплена с корпусом летательного аппарата и ориентирована по его продольной оси. [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964, с. 54-55].
При таком способе возникают ошибки наведения из-за несовпадения продольной оси летательного аппарата с вектором скорости.
Из известных наиболее близким к предлагаемому по технической сущности является способ самонаведения, в котором вектор воздушной скорости летательного аппарата или вектор истинной скорости требуется совместить с линией визирования цели. В данном способе дополнительно измеряют углы ориентации вектора скорости, а двухмерное пеленгование выполняют с помощью антенной системы неподвижной относительно корпуса летательного аппарата или на подвижной платформе, ориентируя ее по направлению вектора скорости. Соответственно параметры рассогласования, которые компенсируют в процессе полета, определяют, как разности углов ориентации вектора скорости и вектора пеленга или непосредственно по результатам двухмерного пеленгования. Вектор скорости может измеряться с помощью флюгерного устройства или акселерометра, соответственно в связанной или нормальной системе координат. Системы измерительных координат должны быть согласованы между собой и с плоскостями управления. [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964, с. 56-58].
Здесь и далее приняты прямоугольные правые системы координат с определением и обозначением осей в соответствии с [Асланян А.Э. Системы автоматического управления полетом летательных аппаратов. Киев, КВВАИУ, 1984, с. 9-10]. Под вектором пеленга понимается единичный вектор, направленный из места положения летательного аппарата на цель. Термин использован взамен принятого в описании способа-прототипа вектора дальности, модуль которого не измеряется.
Недостаток данного способа состоит в низкой точности наведения, так как в его процессе используют результаты только текущего пеленгования без учета предыстории.
Техническим результатом настоящего изобретения является повышение точности наведения на цель.
Указанный технический результат, достигается тем, что в известном способе самонаведения на наземную цель, включающем двухмерное пеленгование цели, определение рассогласования между направлением на цель и направлением полета и траекторное управление полетом путем компенсации рассогласования, при этом измерительные системы согласуют между собой и с плоскостями управления, согласно изобретению, дополнительно и синхронно с пеленгованием измеряют координаты и углы ориентации летательного аппарата, по совокупности этих измерений за время наведения и двухмерных пеленгов определяют координаты цели, по которым уточняют текущее направление на нее, а последующее траекторное управление полетом осуществляют по уточненному направлению на цель.
Указанный технический результат достигается также тем, что согласование измерительных систем между собой и с плоскостями управления выполняют путем преобразования измерительных систем координат с учетом углов ориентации летательного аппарата и с предварительным определением результатов измерений в виде составляющих векторов измерений.
Решение технической задачи основано на переходе от принципа способа-прототипа локальной оптимальности определения направления на цель, как текущего измеренного двухмерного пеленга, к принципу глобальной оптимальности, когда единственным исходно неизвестным параметром является местоположение цели. В соответствии с общей методологией синтеза [Репин В.Г., Тартаковский Г.П. Статистический синтез при априорной неопределенности и адаптация информационных систем. М., Сов. радио, 1977, с. 240-244] этим достигается повышение эффективности информационных систем, в настоящем изобретении - точности определения направления и наведения на цель. Для этого необходимо объединение всех предшествующих текущему моменту самонаведения результатов пеленгования. При этом не приемлемо простое суммирование пеленгов из-за изменения местоположения и ориентации летательного аппарата. Предложено объединение путем оценки координат цели с дополнительным привлечением информации о местоположении летательного аппарата и его ориентации и затем уточнения направления на цель. Необходимым условием является согласование измерительных систем между собой и с плоскостями управления. Согласование выполняют с учетом углов ориентации летательного аппарата преобразованием координат измерительных систем с помощью известных операций, но по отношению и с предварительным представление результатов измерений в виде составляющих векторов по координатным измерительным осям.
Таким образом, учет при уточнении направления на цель всех предшествующих текущему моменту самонаведения результатов пеленгования с оценкой ее координат на основе предложенного согласования измерительных систем между собой и с плоскостями управления позволяет достичь технического результата: повысить точность наведения.
Указанные преимущества, а также особенности настоящего изобретения поясняются прилагаемыми фигурами.
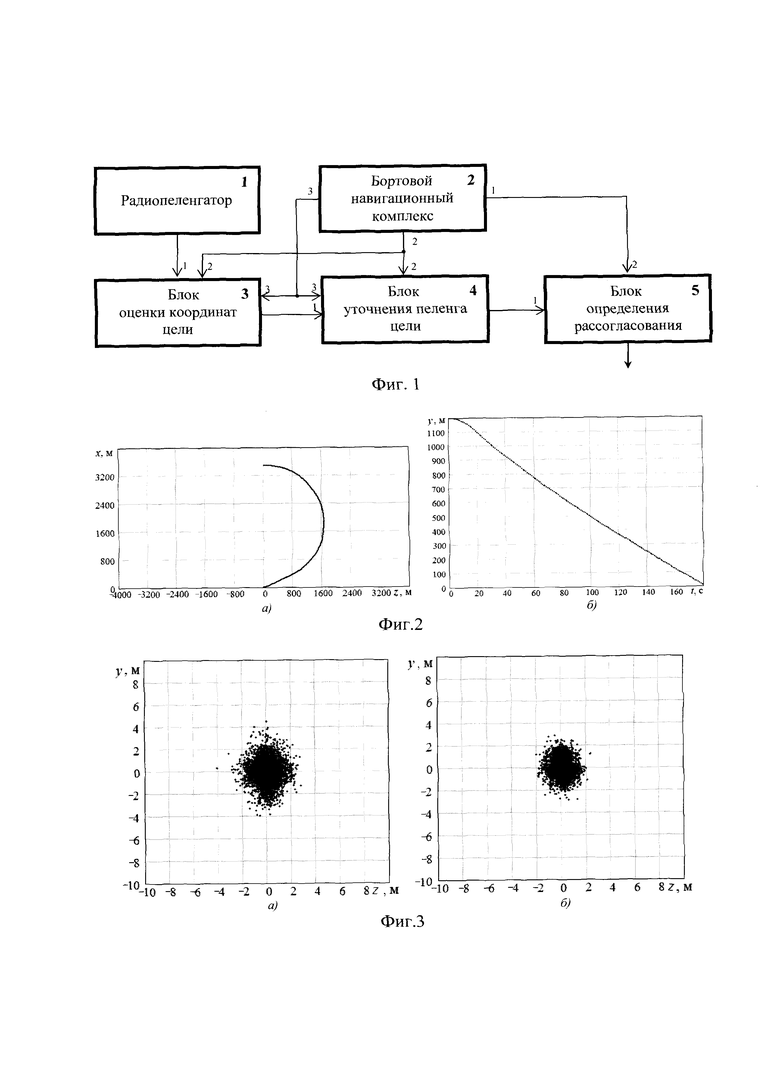
На фиг. 1 представлена структурная схема информационно-измерительной системы для реализации заявленного способа;
на фиг. 2 - траектория самонаведения по полу витку ниспадающей спирали в горизонтальной плоскости - а и по высоте - б;
на фиг. 3 - поле ошибок наведения в вертикальной и горизонтальной плоскости для способа-прототипа - а и предлагаемого способа - б.
Информационно-измерительная система содержит 1 - радиопеленгатор, 2 - бортовой навигационный комплекс, 3 - блок оценки координат цели, 4 - блок уточнения пеленга цели и 5 - блок определения рассогласования. Радиопеленгатор 1 и, через первые входы, блок оценки координат цели 3, блок уточнения пеленга цели 4 и блок определения рассогласования 5, соединены последовательно. Бортовой навигационный комплекс 2 первым выходом подключен ко второму входу блока определения рассогласования 5, а вторым и третьим выходом к одноименным входам блока оценки координат цели 3 и блока уточнения пеленга 4. Выходом информационно - измерительной системы является выход блока определения рассогласования 5.
В бортовом навигационном комплексе 2 измеряют: 1) углы ориентации  ,
,  вектора воздушной скорости по курсу и тангажу, например с помощью флюгера, то есть в связанной системе координат (ССК); 2) координаты летательного аппарата X, Y, Z в нормальной земной системе координат (НЗСК); 3) углы ориентации летательного аппарата в пространстве курс, тангаж, крен: ψ, ϑ, γ, что соответствует углам ориентации ССК относительно НЗСК.
вектора воздушной скорости по курсу и тангажу, например с помощью флюгера, то есть в связанной системе координат (ССК); 2) координаты летательного аппарата X, Y, Z в нормальной земной системе координат (НЗСК); 3) углы ориентации летательного аппарата в пространстве курс, тангаж, крен: ψ, ϑ, γ, что соответствует углам ориентации ССК относительно НЗСК.
Угол ориентации вектора по курсу определяют, как угол между продольной осью летательного аппарата и проекцией вектора на плоскость бокового сечения, проходящую через эту и поперечную ось, а угол ориентации по тангажу - угол между указанной плоскостью и вектором или, что равноценно, между проекцией и самим вектором.
Навигационные измерения выполняют известными способами и устройствами из состава навигационно-пилотажных комплексов [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 244-259].
Радиопеленгатор 1 и его антенная система неподвижны относительно корпуса летательного аппарата. Результаты двухмерного пеленгования представляют в виде продольной, нормальной и поперечной составляющих X*, Y*, Z* вектора пеленга в ССК. Такое представление необходимо для выполнения условия согласования и обеспечивается, например применением антенной системы, состоящей из кольцевой решетки в плоскости бокового сечения и дополнительной антенны на нормальной оси, когда составляющие вектора пеленга определяют, как нормированные набеги фаз по осям ССК. [Уфаев В.А. Определение местоположения наземных целей по результатам двухмерного пеленгования с летно-подъемных средств. Антенны. 2015, №5, с. 59].
Если в радиопеленгаторе измеряют углы ориентации вектора пеленга по курсу и тангажу, азимут ξ и угол места θ, то переход к составляющим вектора выполняют выполняют согласно определению вектора пеленга

Блок оценки координат 3 обеспечивает определение координат цели по результатам всех на текущий момент измерений в НЗСК.
С помощью блока уточнения пеленга 4 определяют направление на цель, уточненный вектор пеленга, с представлением результатов в ССК в виде углов его ориентации по курсу и тангажу.
В блоке 5 определяют рассогласование, как разности углов ориентации вектора скорости и уточненного вектора пеленга.
Функционирование информационно-измерительной системы и процесс самонаведения происходит следующим образом.
Текущие результаты двухмерного пеленгования в блоке 3 вход 1 преобразуют с учетом пространственной ориентации летательного аппарата вход 3 из связанной в нормальную систему координат (НСК). Выполняют это для согласования координат измерительных систем вращением вектора пеленга с помощью обратного матричного преобразования [Асланян А.Э. Системы автоматического управления полетом летательных аппаратов. Киев, КВВАИУ, 1984, с. 13-14]. Для этого транспонированную матрицу перехода М(ψ, θ, γ), определяемую углами ориентации летательного аппарата, умножают на исходный измеренный вектор пеленга

где Т - операция транспонирования матрицы или вектора,
Именно в обеспечение применимости известного преобразования вектор пеленга представляют его составляющими (1).
По совокупности измерений координат летательного аппарата и преобразованного вектора пеленга в блоке 3 определяют координаты цели в горизонтальной плоскости НЗСК, например методом максимального правдоподобия [Уфаев В.А. Определение местоположения наземных целей по результатам двухмерного пеленгования с летно-подъемных средств. Антенны, 2015, №5, с. 58-64]

При дискретных в моменты времени t=1, 2, … измерениях функционал пространственной неопределенности получают по рекуррентной формуле

где ус - высота точки излучений цели,  - наклонная дальность до ее возможного местоположения.
- наклонная дальность до ее возможного местоположения.
В начальный момент времени t=0 устанавливают F0(z,x)=0.
Координаты цели определяют (3), как положение минимума функционала пространственной неопределенности, который получают (4) накоплением за время самонаведения суммы квадратов разностей составляющих измеренных и истинных векторов пеленга в точках возможного положения цели. Область возможного положения цели квантуют с шагом, определяемым допустимой погрешностью наведения.
Накопление при непрерывных измерениях осуществляют интегрированием по времени, а высоту цели, если она неизвестна, оценивают по трехмерному функционалу пространственной неопределенности с дополнительным аргументом ус.
Наряду с изложенным может быть использовано определение координат цели по минимуму расстояния до линий пеленгов, приведенное в указанном источнике. Потенциально несколько менее точное, но с существенно меньшим объемом преобразований, в алгебраической форме, не требующей квантование пространства и многоканальной пространственной обработки.
По оценочным координатам цели и текущим координатам летательного аппарата в блоке 4 уточняют вектор пеленга цели из места текущего положения летательного аппарата с составляющими в НСК равными

где  - оценочная наклонная дальность.
- оценочная наклонная дальность.
Затем, в обеспечение выполнения условия согласования, производят преобразование составляющих уточненного вектора пеленга (5) в связанную систему координат путем прямого матричного преобразования

После чего определяют углы ориентации преобразованного вектора пеленга по курсу и тангажу

где i - мнимая единица, arg(⋅) - аргумент комплексного числа заключенного в скобки, фаза вектора.
Преобразования (7) и (1) взаимно однозначно связаны, выполняют согласно определению вектора пеленга.
Общим принципом согласования является преобразование систем координат с определением векторов, представленных двумя углами ориентации по курсу и тангажу тремя составляющими в ССК при переходе из ССК в НСК и обратным преобразованием в углы ориентации при переходе из НСК в ССК с учетом ориентации летательного аппарата в пространстве.
Таким образом, на выходе блока уточнения пеленга 4 определяют уточненное направление на цель из текущего места положения летательного аппарата.
В блоке 5 определения рассогласования получают разности углов ориентации вектора скорости и преобразованного (7) вектора пеленга

Параметры рассогласования выдают из информационно-измерительной системы на исполнительные элементы летательного аппарата и изменением курса и тангажа компенсируют рассогласование параметров полета.
В соответствии с составом и типом измерительных и исполнительных систем возможны и другие варианты реализации предложенного способа. При прямом наведении скорость не измеряют, с установкой нулевого значения на входе 2 блока 5, компенсируют рассогласование по пеленгу, уточненному относительно текущего измерения по оценочным координатам цели, а при пеленговании в НСК, например с применением гиростабилизированной платформы, и управлении углами пути и наклона траектории не выполняют и матричные преобразования (2), (6), устанавливая М(ψ, θ, γ)=1.
Эффективность изобретения выражается в повышении точности и вероятности наведения на цель.
Количественная оценка выполнена моделированием применительно к наведению беспилотного летательного аппарата в улавливающую посадочную сеть при следующих условиях и основных параметрах: период измерений 1 с, средняя квадратическая ошибка пеленгования 1 град, скорость изменения угла пути и наклона траектории 1 град/с, цель - улавливающая цилиндрическая сеть радиусом основания и высотой 3 м, приводной передатчик установлен в центре сети.
На фиг. 2 для одного из статистических экспериментов показана траектория самонаведения по полувитку ниспадающей спирали: в горизонтальной плоскости а и по высоте полета б, где x, y, z - продольная (ордината), нормальная (высота, аппликата) и поперечная (абсцисса) оси координат, t - время полета. Исходное состояние в начале наведения - горизонтальный полет на высоте 1200 м со скоростью 30 м/с, угол пути равен -90°, угол наклона траектории 0°. В горизонтальной плоскости движение выполняется первоначально по окружности и по прямой линии на заключительном участке, по высоте полета, на начальном коротком участке порядка 10 с, по окружности и далее примерно по прямой глиссады. Формирование такой траектории обусловлено инерционностью процесса компенсации в условиях обычных ограничений скорости маневра летательного аппарата при постоянстве скорости его полета. Качественно и для способа-прототипа траектория аналогична, показанной на фиг. 2, но вследствие определения направления на цель по результатам только текущего пеленгования ошибки наведения здесь выше, чем по предлагаемому способу.
На фиг. 3 представлено поле ошибок наведения в вертикальной и горизонтальной плоскости по совокупности 104 статистических экспериментов: для способа-прототипа а и предлагаемого способа б. Разброс погрешностей для способа-аналога существенно выше, средняя квадратическая ошибка наведения предлагаемым способом по результатам статистического моделирования снижается в 1,4 раза, при этом вероятность наведения (попадания в сеть) увеличивается в оговоренных условиях с 0,88 до 0,97, соответственно вероятность промаха снижается в 4 раза.
Заявленный способ самонаведения на наземную цель применим для посадки летательных аппаратов по приводным передатчикам и для уничтожения цели по ее радиоизлучению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629922C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| Способ управления летательными аппаратами по курсу в угломерной двухпозиционной радиолокационной системе | 2017 |
|
RU2660776C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ В ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2262649C1 |
Изобретение относится к области управления летательными аппаратами и может быть использовано для наведения на наземную цель по ее радиоизлучению. Способ самонаведения на наземную цель включает двухмерное пеленгование цели, определение рассогласования между направлением на нее и направлением полета и траекторное управление полетом путем компенсации рассогласования, при этом измерительные системы согласуют между собой и с плоскостями управления. Дополнительно и синхронно с пеленгованием измеряют координаты и углы ориентации летательного аппарата, по совокупности этих измерений за время наведения и двухмерных пеленгов определяют координаты цели, по которым уточняют текущее направление на нее, а последующее траекторное управление полетом осуществляют по уточненному направлению на цель. Согласование измерительных систем между собой и с плоскостями управления выполняют путем преобразования измерительных систем координат с учетом углов ориентации летательного аппарата и с предварительным определением результатов измерений в виде составляющих векторов измерений. Технический результат – повышение точности наведения на цель. 1 з.п. ф-лы, 3 ил.
1. Способ самонаведения на наземную цель, включающий двухмерное пеленгование цели, определение рассогласования между направлением на цель и направлением полета и траекторное управление полетом путем компенсации рассогласования, при этом измерительные системы согласуют между собой и с плоскостями управления, отличающийся тем, что дополнительно и синхронно с пеленгованием измеряют координаты и углы ориентации летательного аппарата, по совокупности этих измерений за время наведения и двухмерных пеленгов определяют координаты цели, по которым уточняют текущее направление на нее, а последующее траекторное управление полетом осуществляют по уточненному направлению на цель.
2. Способ по п. 1, отличающийся тем, что согласование измерительных систем между собой и с плоскостями управления выполняют путем преобразования измерительных систем координат с учетом углов ориентации летательного аппарата и с предварительным определением результатов измерений в виде составляющих векторов измерений.
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| Способ управления летательными аппаратами по курсу в угломерной двухпозиционной радиолокационной системе | 2017 |
|
RU2660776C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| US 4267562 B, 12.05.1981. | |||

