Изобретение относится к оборонной технике и может быть использовано для повышения эффективности доставки элементов полезной нагрузки беспилотного летательного аппарата (БПЛА) на воздушный объект (ВО).
Известен способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, включающий излучение двумя действующими в разных диапазонах электромагнитного спектра неконтактными датчиками цели, фиксацию цели и определение стороны ее пролета на больших промахах, фиксацию цели и определение стороны ее пролета на малых промахах, определение положения цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты, сравнение положения цели, определяемой, с одной стороны, головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели, и при совпадении положений цели установление факта отсутствия помехи и определение значения угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями, определение динамики углового перемещения цели на основе значений угловой скорости и ускорения движения цели, определение прогнозируемого углового положения цели на основе учета динамики ее углового перемещения и формирование поля поражения боевой части ракеты в направлении пролета цели с учетом ее прогнозируемого углового перемещения, при этом дополнительно определяют условия подхода ракеты к цели и класс цели, с учетом полученных данных и конструктивных особенностей взрывателя и боевой части ракеты уточняют время задержки на подрыв боевой части ракеты, при этом в качестве параметров условий подхода ракеты к цели определяют промах ракеты относительно цели и скорость сближения ракеты с целью, класс цели определяют на основе анализа величины ширины диаграммы направленности антенны [1].
Недостатком данного способа является недостаточная эффективность применения БПЛА при поражении ВО из-за недостаточного использования информации об условиях встречи БПЛА с ВО (определения ракурса ВО, отсутствие управления пространственными характеристиками поля элементов полезной нагрузки в зависимости от величины промаха БПЛА).
Наиболее близким к заявляемому (прототипом) является способ доставки полезной нагрузки на воздушный объект, включающий излучение сигнала информационным датчиком в направлении объекта, прием отраженного от объекта сигнала, определение скорости сближения беспилотного летательного аппарата с объектом, определение прогнозируемого углового положения объекта относительно продольной оси беспилотного летательного аппарата, формирование поля элементов полезной нагрузки в направлении пролета объекта с учетом его прогнозируемого углового положения, уточнение величины времени задержки на выброс полезной нагрузки с учетом полученных данных и конструктивных особенностей информационного датчика и полезной нагрузки беспилотного летательного аппарата в котором дополнительно получают с борта носителя беспилотного летательного аппарата типовой линейный размер объекта, определяют с помощью информационного датчика на пассивном участке полета беспилотного летательного аппарата текущие прогнозируемые значения промаха беспилотного летательного аппарата относительно объекта, ракурса объекта, а также текущее прогнозируемое время задержки на выброс полезной нагрузки, в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют значения величин относительной скорости сближения беспилотного летательного аппарата с объектом, углового положения объекта относительно беспилотного летательного аппарата, ракурса объекта, промаха беспилотного летательного аппарата относительно объекта, определяют по фиксированным значениям относительной скорости сближения беспилотного летательного аппарата с объектом, углового положения объекта относительно беспилотного летательного аппарата, ракурса объекта, промаха беспилотного летательного аппарата относительно объекта величину времени задержки на выброс полезной нагрузки, осуществляют по истечении времени задержки выброс элементов полезной нагрузки в направлении воздушного объекта.
Недостатком данного способа является недостаточная эффективность применения БПЛА при доставке элементов полезной нагрузки на ВО из-за отсутствия управления пространственными и энергетическими характеристиками поля элементов полезной нагрузки в зависимости от величины промаха БПЛА.
Технической задачей изобретения является повышение эффективности применения БПЛА при доставке элементов полезной нагрузки на ВО за счет управления пространственными и энергетическими характеристиками поля элементов полезной нагрузки в зависимости от величины промаха БПЛА.
Решение технической задачи достигается тем, что в способе доставки полезной нагрузки на ВО, включающем излучение сигнала информационным датчиком в направлении объекта, прием отраженного от объекта сигнала, определение скорости сближения беспилотного летательного аппарата с объектом, определение прогнозируемого углового положения объекта относительно продольной оси беспилотного летательного аппарата, формирование поля элементов полезной нагрузки в направлении пролета объекта с учетом его прогнозируемого углового положения, уточнение величины времени задержки на выброс полезной нагрузки с учетом полученных данных и конструктивных особенностей информационного датчика и полезной нагрузки беспилотного летательного аппарата, при этом получают с борта носителя беспилотного летательного аппарата типовой линейный размер объекта, определяют с помощью информационного датчика на пассивном участке полета беспилотного летательного аппарата текущие прогнозируемые значения промаха беспилотного летательного аппарата относительно объекта, ракурса объекта, а также текущее прогнозируемое время задержки на выброс полезной нагрузки, в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют значения величин относительной скорости сближения беспилотного летательного аппарата с объектом, углового положения объекта относительно беспилотного летательного аппарата, ракурса объекта, промаха беспилотного летательного аппарата относительно объекта, определяют по фиксированным значениям относительной скорости сближения беспилотного летательного аппарата с объектом, углового положения объекта относительно беспилотного летательного аппарата, ракурса объекта, промаха беспилотного летательного аппарата относительно объекта величину времени задержки на выброс полезной нагрузки, осуществляют по истечении времени задержки выброс элементов полезной нагрузки в направлении воздушного объекта, дополнительно предварительно определяют интервалы предполагаемого промаха беспилотного летательного аппарата относительно объекта, для каждого интервала предполагаемого промаха и пространственного положения объекта формируют код, связанный с набором узлов инициирования полезной нагрузки, в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют код, подключая требуемые узлы инициирования полезной нагрузки, осуществляют выброс рационального числа элементов полезной нагрузки, имеющих рациональную величину скорости движения в направлении объекта. Новыми существенными признаками изобретения являются:
- предварительно определяют интервалы предполагаемого промаха беспилотного летательного аппарата относительно объекта, для каждого интервала предполагаемого промаха и пространственного положения объекта формируют код, связанный с набором узлов инициирования полезной нагрузки;
- в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют код, подключая требуемые узлы инициирования полезной нагрузки;
- осуществляют выброс рационального числа элементов полезной нагрузки, имеющих рациональную величину скорости движения в направлении объекта.
Новая совокупность существенных признаков обеспечивает решение поставленной технической задачи с достижением заявленного технического результата, а именно, повышения эффективности применения БПЛА при доставке элементов полезной нагрузки на ВО за счет управления пространственными и энергетическими характеристиками элементов полезной нагрузки БПЛА.
Использование единой совокупности существенных отличительных признаков в известных технических решениях не обнаружено, что характеризует соответствие рассматриваемого технического решения критерию «новизна».
Изложенная выше совокупность новых существенных признаков в сочетании с общими известными обеспечивает решение поставленной задачи с достижением требуемого технического результата и характеризует предложенное техническое решение существенными отличиями по сравнению с известным уровнем техники.
Изобретение иллюстрируется чертежами.
На фиг. 1 приведена схема относительного положения БПЛА и ВО в момент t0 ослепления БРЛС.
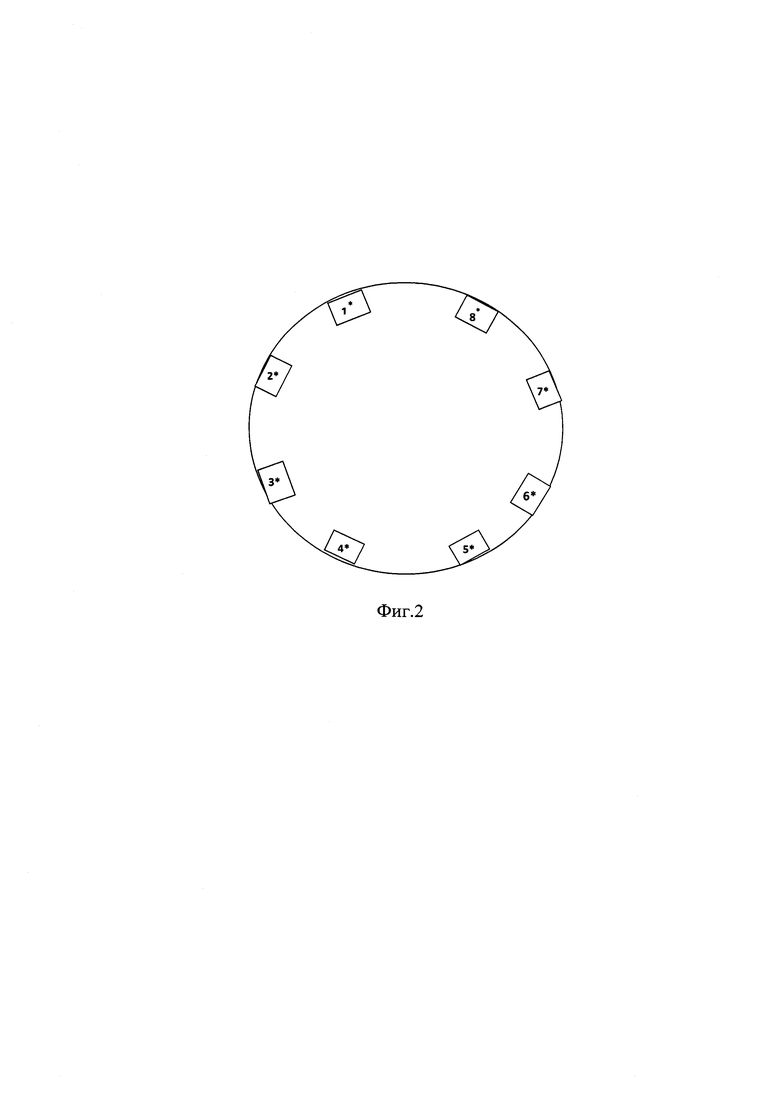
На фиг.2 приведена схема размещения узлов инициирования полезной нагрузки БПЛА, где 1* - 8* - узлы инициирования полезной нагрузки.
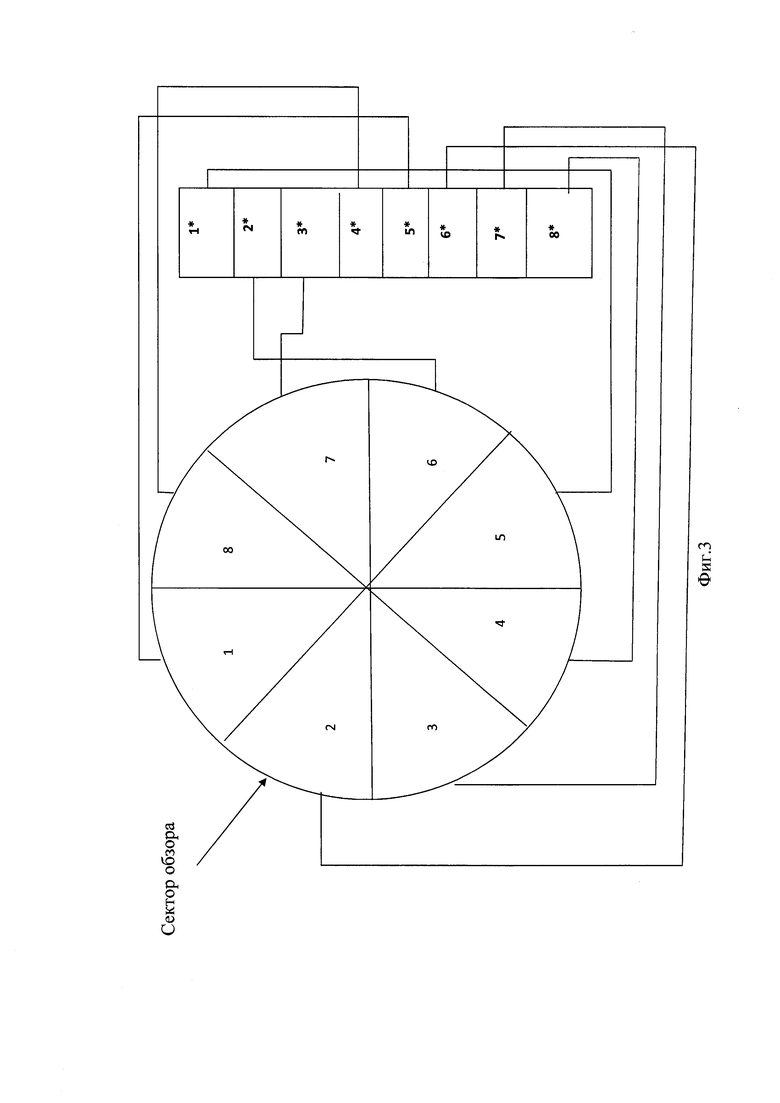
На фиг. 3 приведена схема определения направления на ВО на борту БПЛА.
На фиг. 4 приведена схема формирователя кода для подключения узлов инициирования полезной нагрузки.
Заявляемый способ является результатом научно-исследовательской и экспериментальной работы по повышению эффективности применения БПЛА при доставке элементов полезной нагрузки на ВО.
Заявляемый способ реализуется следующим образом.
Пусть на борту БПЛА размещена навигационная система; измерители положения ракеты относительно центра массы; бортовая радиолокационной станция реализующая активный вид радиолокации с пассивным ответом; бортовая цифровая ЭВМ (БЦВМ). БПЛА в процессе самонаведения сближается с ВО по методу пропорциональной навигации. В БЦВМБПЛА формируются оценки фазовых координат, необходимые для реализации его самонаведения. Схема относительного положения БПЛА и ВО в момент t0 ослепления БРЛС показана на фиг. 1.
Пусть в момент времени t0 БПЛА и ВО движутся со скоростями Vp и VЦ соответственно, взаимная скорость сближения V, дальность до ВО DЦ.
Бортовая радиолокационная станция в составе ИИС БПЛА реализует измерения вектора фазовых координат относительного положения ВО до момента t0 по варианту X=[βεωDЦVγψθ]T, где β, ε - соответственно азимут и угол места ВО; ω - угловая скорость линии визирования; DЦ, V - соответственно дальность и скорость сближения с ВО; γ, ψ, θ - углы соответственно крена, рыскания и тангажа. БПЛА стабилизирован по крену.
В связи с тем, что определение промаха выполняется в интересах полезной нагрузки, которая, как правило, конструктивно ориентирована по продольной оси БПЛА, то картинная плоскость ВОП0 (см. фиг. 1) принята перпендикулярной оси ОХ, их пересечение обозначено Р. В плоскости П0 формируется круг с центром в точке Ц - пересечение картинной плоскости линией визирования цели БРЛС. Радиус круга принят равным максимально допустимому промаху БПЛА мимо объекта наведения (на фиг. 1 не обозначен). Круг разбит на одинаковые секторы 1-8, количество которых является удовлетворительным для определения радиального направления на ВО. На борту БПЛА требуется определить радиальное направление на ВО, величину промаха в текущий момент времени, величину ракурса ВО в текущий момент времени. В [2] предложен метод определения радиального направления на ВО, сущность которого заключается в вычислении вероятностей нахождения точки промаха Р в текущий момент времени в каждом из секторов картинной плоскости объекта. Данные вероятности вычисляются на основании измерений вектора фазовых координат БПЛА, а также относительного положения ВО и БПЛА. Соответствующий предложенному методу алгоритм вычисления вероятностей нахождения точки промаха Р в каждом из секторов картинной плоскости объекта имеет вид:




где  - соответственно апостериорная и прогнозируемая вероятности нахождения точки промаха в l-м секторе в k-й момент времени;
- соответственно апостериорная и прогнозируемая вероятности нахождения точки промаха в l-м секторе в k-й момент времени;
q(lk|lk-1) - коэффициент прогнозирования изменения положения точки промаха при наличии дополнительной информации о последовательности смены секторов;
 - оценка измеренного значения i-й фазовой координаты относительного положения БПЛА и ВО в текущий момент времени;
- оценка измеренного значения i-й фазовой координаты относительного положения БПЛА и ВО в текущий момент времени;
mi(l) - математическое ожидание («центр тяжести») l-го сектора по i-й фазовой координате;
 - оценка дисперсии измерений i-й фазовой координаты.
- оценка дисперсии измерений i-й фазовой координаты.
Номер сектора, где в текущий момент времени находится точка промаха Р, определяется по критерию максимума апостериорной вероятности

В [3] приведен вариант детализации картинной плоскости ВО при реализации разработанного метода определения радиального направления на объект, определены взаимосвязи фазовых координат, используемых в алгоритме вычисления вероятностей нахождения точки промаха в каждом из секторов картинной плоскости объекта.
Посредством имитационного моделирования в результате выполненных исследований показана пригодность разработанного алгоритма (1)-(5) для оперативного определения направления на ВО в интересах полезной нагрузки БПЛА.
При определении величины промаха за основу процедуры определения величины промаха - отрезка ЦР на фиг.1 примем метод, описанный в [4]:

где pr - величина промаха; 
Текущий, т.е. определяемый в текущий момент времени промах является случайной величиной, так как зависит от случайных возмущений, действующих на БПЛА и его систему управления в процессе полета κВО. Учитывая то, что БПЛА стабилизирован по крену и рассеивание в картинной плоскости ВО можно считать круговым, оценку текущего промаха достаточно получить для одного канала. Определение величины промаха в бортовой цифровой ЭВМ БПЛА можно рассматривать на примере одной плоскости - азимутальной. Полученные результаты легко обобщаются на пространственный случай путем векторного сложения с результатами для угломестной плоскости.
В БЦВМ современных БПЛА, наводимых по методу пропорциональной навигации, оценки фазовых координат, входящих в формулу (6), формируются на выходах соответствующих фильтров, синтезированных для ожидаемых усредненных условий применения. Данные оценки принципиально могут быть использованы для определения величины промаха по формуле (6).
Несоответствие моделей состояния и измерения реальным условиям, складывающимся при сближении БПЛА с ВО, приводит к понижению точности оценивания фазовых координат и, соответственно, к понижению точности определения величины промаха. При определении величины промаха на борту БПЛА в интересах полезной нагрузки необходимо учитывать ряд особенностей при сближении БПЛА и ВО на малые дальности. В [4, 5] получены приближенные аналитические формулы и подробно исследована точность пропорционального наведения БПЛА в различных тактических ситуациях. Показано, что точность самонаведения сильно зависит от условий применения, маневренных характеристик объектов и помех. В [6, 7] разработаны методики для приближенного анализа динамической и флуктуационной составляющих промаха БПЛА с радиолокационным информационным датчиком. Формулы, соответственно для динамической prД и флуктуационной prФ составляющих промаха в момент окончания самонаведения, имеют вид:


где Dpr - дисперсия промаха prФ; jЦ - ускорение ВО; KИВС, KСР, K1, KV, Kω - соответственно коэффициенты передачи информационно-вычислительной системы БПЛА, системы «система управления БПЛА-БПЛА», системы формирования сигнала рассогласования в соответствии с методом наведения, измерителя скорости сближения, угломера при оценивании угловой скорости линии визирования; Gω - спектральная плотность шума оценки угловой скорости линии визирования; ΔFэф - эффективная полоса пропускания информационного датчика по угловому шуму; N0 - навигационный параметр метода наведения. Формулы (7) и (8) демонстрируют весьма сложную зависимость характеристик промаха БПЛА как от параметров системы самонаведения, так и от условий применения. В случае, если БЦВМ БПЛА обладает достаточным ресурсом, то может быть реализован один из возможных вариантов повышения точности определения величины промаха.
Особенностью функционирования БРЛС БПЛА является ее «ослепление» при сближении с ВО на некоторую, относительно малую дальность Dk и неспособность выполнять свои функции по предназначению в процессе дальнейшего сближения. Основной причиной «ослепления» БРЛС с моноимпульсным угломером является так называемый угловой шум [8]. При малых расстояниях, когда угловые размеры ВО соизмеримы с шириной диаграммы направленности антенны БРЛС, угловой шум может привести к ошибкам пеленгации и достаточно большим ошибкам оценивания угловой скорости линии визирования. Также к значительным ошибкам оценивания угловой скорости линии визирования по мере уменьшения дальности до ВО приводит преломление волн в обтекателе антенны БРЛС. При изменении угловой скорости антенны относительно продольной оси БПЛА возникает так называемая скоростная ошибка обтекателя, увеличивающаяся по мере увеличения угловой скорости антенны.
В [7] приведены алгоритмы фильтрации для получения оценок фазовых координат относительного положения БПЛА и ВО, используемых при реализации метода самонаведения. Указаны особенности получения оценок, в том числе тех фазовых координат, которые могут быть применены в БЦВМ БПЛА для определения величины промаха по формуле (6). Оценки дальности и скорости сближения с ВО в [7] предлагается получать посредством фильтрации по алгоритмам стохастической теории оптимально управления (СТОУ) [9, 10] выходных сигналов многоконтурного измерителя дальности и ее производных с независимым оцениванием скорости сближения. Оценку угловой скорости линии визирования ВО предложено формировать по алгоритмам СТОУ на основании выходных сигналов квазиоптимального угломера интенсивно маневрирующих объектов. Точность оценок дальности, скорости сближения и угловой скорости линии визирования ВО в большой степени зависит от соответствия моделей состояния реально складывающейся тактической ситуации.
Учитывая особенности функционирования БРЛС БПЛА на малых дальностях по мере сближения с ВО, а также неизбежные методические ошибки при оценивании фазовых координат, используемых в формуле (6) можно сделать вывод о нецелесообразности точечной оценки величины промаха, т.е. оценки текущего промаха в интересах полезной нагрузки в конечный момент самонаведения БПЛА. Альтернативой может быть интегральная оценка величины промаха, определяемая в БЦВМ БПЛА на основании имеющихся оценок фазовых координат, используемых при реализации метода самонаведения. Предлагаемая процедура интегральной оценки величины промаха состоит из трех этапов и заключается в следующем. На первом этапе осуществляется распознавание тактической ситуации, т.е. идентификация моделей состояния для повышения точности оценок фазовых координат, используемых в формуле (6). На втором этапе осуществляется формирование выборки из значений текущих промахов по формуле (6). На третьем этапе, на основании выборки формируются оценки математического ожидания и дисперсии величины промаха БПЛА, в том числе с учетом прогнозируемых оценок фазовых координат. Ориентировочные усредненные значения дальностей до ВОDЦЭ и длительности tЭ указанных этапов, для БПЛА с активной БРЛС, находятся в диапазоне: 1 этап - DЦЭ1=3000-1500 м, tЭ1=4.5-2c; 2 этап - DЦЭ2=1500-500 м, tЭ2=2-0.7 с; 3 этап - DЦЭ3=500-0 м, tЭ3=0.7c. Очевидно, что длительность этапов будет зависеть от назначаемых дальностей DЦЭ и скорости сближения БПЛА с ВО, т.е. от собственных скоростей БПЛА и ВО, а также ракурса ВО. Назначаемые дальности DЦЭ в свою очередь будут зависеть от типа ВО. На третьем этапе, который может являться этапом после «ослепления» БРЛС и который целесообразно «назначать» при достижении определенной дальности в зависимости от типа ВО, или определять, например, по заранее установленному пороговому значению при изменении величины сигнала в суммарном канале БРЛС, формирование оценки промаха осуществляется по результатам прогноза фазовых координат.
Распознавание тактической ситуации на первом этапе процедуры определения величины промаха на борту БПЛА целесообразно, как с точки зрения повышения точности оценивания фазовых координат за счет коррекции моделей состояния и наблюдения, так и при обосновании значений DЦЭ2 и DЦЭ3. Под тактической ситуацией в наиболее простом случае рассматривается конкретное сочетание типа ВО и выполняемого им маневра (поперечной перегрузке ВО).
Каждой ситуации ставятся в соответствие заранее определенные модели состояния и наблюдения с заданными интенсивностями шумов состояния и наблюдения, а также значения DЦЭ2 и DЦЭ3. Алгоритм распознавания тактической ситуации на основании байесовского подхода по аналогии с (1)-(5) для данного случая будет иметь следующий вид:





где zi,  - соответственно сигнал и оценка его дисперсии на выходе i-го измерителя; l - количество измерителей, задействованных в распознавании s-й ситуации; K - длительность серии, которая может ограничиваться из-за действия организованных помех.
- соответственно сигнал и оценка его дисперсии на выходе i-го измерителя; l - количество измерителей, задействованных в распознавании s-й ситуации; K - длительность серии, которая может ограничиваться из-за действия организованных помех.
Алгоритм (9)-(13) обладает высоким быстродействием. Так, время распознавания ситуации, аналогично [3], составляет сотые доли секунды.
При формировании выборки из значений текущих промахов в формуле (6) используются оценки соответствующих фазовых координат. При этом в моделях состояния и измерения для алгоритмов фильтрации ω, Dц, V в зависимости от текущего значения s используются заранее определенные значения спектральных плотностей шумов. Ожидается, что данная процедура за счет высокого быстродействия распознавания тактической ситуации будет способствовать повышению точности оценивания именно данных фазовых координат без влияния на основные алгоритмы фильтрации всех фазовых координат, связанных многочисленными перекрестными связями, используемых при управлении БПЛА.
Выборку из значений промахов целесообразно формировать как простую случайную выборку с тем расчетом, чтобы к моменту применения полезной нагрузки БПЛА статистическая ошибка оценивания промаха не превышала 5% с доверительной вероятностью 0,95. Это достигается назначением дальности DЦЭ2 начала второго этапа и назначением такого интервала съема данных, который обеспечивает более 400 единичную величину выборки. На третьем этапе при достижении DЦЭ3 в алгоритмах фильтрации ω, DЦ, V измеряемые значения фазовых координат заменяются прогнозируемыми по правилам, описанным в [6], с продолжением формирования выборки. Оценки математического ожидания и среднеквадратического отклонения промаха формируются по мере получения выборочных значений по широко известным правилам.
Для корректного определения величины времени срабатывания полезной нагрузки БПЛА необходимо знать величину ракурса ВО. Поэтому необходимо иметь алгоритм определения ракурса ВО, реализуемый в ИИС БПЛА с радиолокационной головкой самонаведения (РГС) на основании информации только от имеющихся в составе измерительной системы (ИС) измерителей и имеющейся в составе ИС базы данных (т.е. без привлечения какой-либо дополнительной информации из вне). Возможный алгоритм определения ракурса при сближении БПЛА с ВО в задней и передней полусферах изложен в работе [2].
Величина времени задержки, обеспечивающая оптимальное для условий сближения БПЛА с ВО(pr,Vсб) положение точки срабатывания полезной нагрузки БПЛА определяется в соответствии с выражением:

где pr - величина промаха БПЛА относительно ВО,  - среднее направление разлета элементов полезной нагрузки в динамике, ϕ0 - угол наклона диаграммы направленности радиолокационного информационного датчика БПЛА, V0 - начальная скорость разлета элементов, Vсб - относительная скорость сближения БПЛА с ВО, L - продольный размер ВО.
- среднее направление разлета элементов полезной нагрузки в динамике, ϕ0 - угол наклона диаграммы направленности радиолокационного информационного датчика БПЛА, V0 - начальная скорость разлета элементов, Vсб - относительная скорость сближения БПЛА с ВО, L - продольный размер ВО.
Среднее направление разлета элементов в динамике определяется в соответствии с выражением:

где  - среднее направление разлета элементов в статике.
- среднее направление разлета элементов в статике.
Величина времени задержки на срабатывание, которое должна отработать ИС БПЛА определяется по формуле:

где tи - средняя величина времени инерционности инициирующих элементов полезной нагрузки.
Далее, исходя из результатов математического и полунатурного моделирования определяют величину максимального возможного промаха БПЛА относительно ВО для всех потенциальных условий его применения.
Полученную величину промаха делят на интервалы, например, A1,A2,A3,
где 0 ≤A1<R1, R1 ≤A1<R2, R2 ≤A1<R3. R1,R2,R3 - максимальная величина промаха на первом, втором и третьем интервалах.
Далее для каждого интервала предполагаемого промаха и пространственного положения объекта формируют код, связанный с набором узлов инициирования полезной нагрузки(см. фиг. 2), в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют код(см. фиг. 4), подключая требуемые узлы инициирования полезной нагрузки, осуществляют выброс рационального числа элементов полезной нагрузки, имеющих рациональную величину скорости движения в направлении объекта. При этом следует отметить, что изменение количества подключаемых узлов инициирования изменяет скорость движения и число элементов полезной нагрузки, движущихся в направлении ВО.
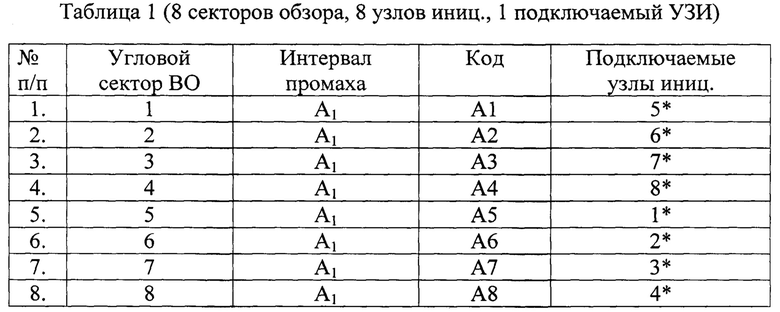
В качестве примера рассмотрим процесс формирования кода для типового ВО. Предположим, что информационный датчик БПЛА имеет 8 секторов обзора(см. фиг. 3). Кроме того, величина предполагаемого промаха БПЛА разбита на 3 интервала A1,A2,A3. В таблице 1 приведен пример выбора кода инициирования для интервала промаха A1 и одного узла инициирования (УЗИ).
В таблице 2 приведен пример выбора кода инициирования для интервала промаха А2 и трех узлов инициирования.

В таблице 3 приведен пример выбора кода инициирования для интервала промаха А3 и пяти узлов инициирования.

Данные, приведенные в таблицах 1-3 можно представить в матричном виде. Примем обозначения:
N - количество узлов инициирования (УЗИ),
nс - номер углового сектора ВО,
nу - номера подключаемых УЗИ,
Ai - интервал промаха, i=1…3;
Ki,nc - код подключения УЗИ.
Для всех возможных тактических ситуаций сформируем массив номеров подключаемых УЗИ, представляющий собой матрицу с элементами nyj,k, j=1…8, k=1*…5*, вычисляемый по формулам (1), …, (4) Для j=nс и k=3*:

Для k≠3* имеем:
- при интервале промаха А1 получаем nyj,k=0; (2)
- при интервале промаха А2 для k=1,5 получаем nyj,k=0;(3)
- при интервале промаха А3 получаем nyj,k=nyj,3+k - 3, (4)
Сформированные массивы приведены таблице 4.

Для каждого значения промаха Ai в вычислителе БПЛА записывается двумерный массив чисел, соответствующих номерам подключаемых УЗИ, при этом в каждой строке записан код подключения, а номер строки соответствует номеру сектора, в котором находится ВО.
Использование предлагаемого способа позволит повысить эффективность применения БПЛА при доставке элементов полезной нагрузки на ВО за счет управления пространственными и энергетическими характеристиками поля элементов полезной нагрузки в зависимости от величины промаха БПЛА.
Источники информации
1. Патент РФ на изобретение №2484419, кл. F42B 15/01 от 10.06.2013 г.
2. Патент РФ на изобретение №2784492, кл. F42B 15/01, F41G 7/00 от 07.06.2022.
3. Себряков Г.Г., Красильщиков М.Н. Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов. М.: ФИЗМАТЛИТ, 2009. 556 с.
4. Себряков Г.Г., Мужичек С.М., Скрынников А.А., Павлов В.И., Ермолин О.В. Определение радиального направления на объект в системе наведения беспилотного летательного аппарата // Вестник компьютерных и информационных технологий. 2016. №12. С.24-28.
5. Себряков Г.Г., Мужичек С.М., Скрынников А.А., Павлов В.И., Ермолин О.В. Определение мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала // Вестник компьютерных и информационных технологий. 2017. №5. С.23-27.
6. Бухалев В.А. Обработка информации и управление ракетами в условиях противодействия. - М.: Военно-воздушной академии имени профессора Н.Е. Жуковского и Ю.А. Гагарина, 2009. - 146 с.
7. Авиационные системы радиоуправления. Т.1. Принципы построения систем управления. Основы синтеза и анализа / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: «Радиотехника», 2003. - 192 с.
8. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И.Меркулова. - М.: «Радиотехника», 2003. - 390 с.
9. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 1991. - 608 с.
10. Мужичек С.М., Обросов К.В., Ким В.Я., Лисицын В.М. Определение направления полета по сигналам оптико-электронной системы переднего обзора. Вестник компьютерных и информационных технологий. 2013. №5 (107). С. 8-13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| Способ комплексирования информации при определении направления беспилотного летательного аппарата на воздушный объект и величины предполагаемого промаха | 2022 |
|
RU2794733C1 |
| Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала | 2019 |
|
RU2721623C1 |
| Способ комплексирования бортовой радиолокационной станции пилотируемого летательного аппарата и бортовых радиолокационных станций беспилотных летательных аппаратов при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов | 2020 |
|
RU2750884C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |


Изобретение относится к оборонной технике и может быть использовано для повышения эффективности доставки элементов полезной нагрузки беспилотного летательного аппарата (БПЛА) на воздушный объект (ВО). Предварительно определяют интервалы предполагаемого промаха БПЛА относительно объекта, для каждого интервала предполагаемого промаха и пространственного положения объекта формируют код, связанный с набором узлов инициирования полезной нагрузки. В момент ослепления информационного датчика БПЛА фиксируют код, подключая требуемые узлы инициирования полезной нагрузки. Осуществляют выброс рационального числа элементов полезной нагрузки, имеющих рациональную величину скорости движения в направлении объекта. Повышается эффективность применения БПЛА при доставке элементов полезной нагрузки на ВО за счет управления пространственными и энергетическими характеристиками элементов полезной нагрузки БПЛА. 4 ил., 4 табл.
Способ доставки полезной нагрузки на воздушный объект, включающий излучение сигнала информационным датчиком в направлении объекта, прием отраженного от объекта сигнала, определение скорости сближения беспилотного летательного аппарата с объектом, определение прогнозируемого углового положения объекта относительно продольной оси беспилотного летательного аппарата, формирование поля элементов полезной нагрузки в направлении пролета объекта с учетом его прогнозируемого углового положения, уточнение величины времени задержки на выброс полезной нагрузки с учетом полученных данных и конструктивных особенностей информационного датчика и полезной нагрузки беспилотного летательного аппарата, при этом получают с борта носителя беспилотного летательного аппарата типовой линейный размер объекта, определяют с помощью информационного датчика на пассивном участке полета беспилотного летательного аппарата текущие прогнозируемые значения промаха беспилотного летательного аппарата относительно объекта, ракурса объекта, а также текущее прогнозируемое время задержки на выброс полезной нагрузки, в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют значения величин относительной скорости сближения беспилотного летательного аппарата с объектом, углового положения объекта относительно беспилотного летательного аппарата, ракурса объекта, промаха беспилотного летательного аппарата относительно объекта, определяют по фиксированным значениям относительной скорости сближения беспилотного летательного аппарата с объектом, углового положения объекта относительно беспилотного летательного аппарата, ракурса объекта, промаха беспилотного летательного аппарата относительно объекта величину времени задержки на выброс полезной нагрузки, осуществляют по истечении времени задержки выброс элементов полезной нагрузки в направлении воздушного объекта, отличающийся тем, что предварительно определяют интервалы предполагаемого промаха беспилотного летательного аппарата относительно объекта, для каждого интервала предполагаемого промаха и пространственного положения объекта формируют код, связанный с набором узлов инициирования полезной нагрузки, в момент ослепления информационного датчика беспилотного летательного аппарата фиксируют код, подключая требуемые узлы инициирования полезной нагрузки, осуществляют выброс рационального числа элементов полезной нагрузки, имеющих рациональную величину скорости движения в направлении объекта.
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| СПОСОБ УПРАВЛЕНИЯ ХАРАКТЕРИСТИКАМИ ПОЛЯ ПОРАЖЕНИЯ ОСКОЛОЧНО-ФУГАСНОЙ БОЕВОЙ ЧАСТИ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2484419C1 |
| Способ наведения беспилотного летательного аппарата | 2018 |
|
RU2691902C1 |
| Способ коррекции формируемой конфигурации маршрута беспилотного планирующего летательного аппарата | 2020 |
|
RU2749990C1 |
| СПОСОБ НАВЕДЕНИЯ НА ВЫСОКОСКОРОСТНЫЕ ВЫСОКОМАНЕВРЕННЫЕ ВОЗДУШНЫЕ ОБЪЕКТЫ | 2020 |
|
RU2751378C1 |
| CN 110595426 А, 20.12.2019 | |||
| US 20180261101 А1, 13.09.2018. | |||
