Изобретение относится к тренажерам для обучения механика-водителя бронированной гусеничной машины.
Наиболее близким техническим решением к предлагаемому изобретению является кинотренажер (см. RU 2009544 C1 (в/ч 68054) 15.03.1994, 5 с.), который состоит на следующих основных составных частей: кабина в сборе, подставка кинопроектора, пульт управления, стойка питания, мостик управления, кинопроектор, шкаф устройства отображения информации (УОИ), киноэкран, блок питании кинопроектора (БПК), переговорное устройство, комплект монтажных частей, фильмостат. Кабина в сборе состоит из кабины, люльки, рамы. Кабина предназначена для размещения обучаемого и воспроизведения обстановки отделения управления танка Т-72 и выдачи управляющих сигналов с датчиков. В кабине размещены: привод поворотов и переключения передач; блок датчиков топливоподкачивающего насоса (ТПН) и выпуска воздуха; привод управления подачей топлива (ПТ), привод управления остановочным тормозом (ОТ); привод управления педалью сцепления (ПС); щит водителя; датчик топливного крана подогревателя; люк механика-водителя; прибор наблюдения; датчик клапана воздухопуска; сиденье водителя; вентилятор; привод жалюзи; воздушные баллоны; выносной пульт; щит освещения. На люльке расположена акустическая система. На раме размещены элементы привода гидравлического и прибор принимающий.
Недостатком известного кинотренажера является его громоздкость, необходимость затемнения помещения, в котором проводятся занятия, отсутствие возможности самостоятельного обучения, большая информационная загруженность инструктора, ограниченные возможности обучаемого по маневрированию при выполнении упражнений, отсутствие объективной оценки по показателям установленным курсом вождения, отсутствие обратной связи между моделируемой визуальной обстановкой и моделями агрегатов машины, отсутствие аттестации по запуску подогревателя, низкая надежность электромеханических узлов кинопроектора.
Такое положение привело к низкому качеству подготовки обучаемых, которое проявляется в том, что большинство из них в период подготовки приобретают навыки вождения, недостаточные для уверенного самостоятельного управления бронированной гусеничной машиной.
Задачей предлагаемого изобретения является повышение качества обучения и уменьшение громоздкости тренажера.
Поставленная задача решается за счет введения в известный тренажер дополнительных элементов.
В состав компьютерного тренажера начальной подготовки механика-водителя вводится компьютерный монитор, устанавливаемый перед смотровым прибором, клавиатура и манипулятор, которые размещаются в кабине, рядом с кабиной устанавливается аппаратная стойка, на которой размещаются: блок согласующих устройств (БСУ), принтер, блок питания аппаратуры и вычислитель, который включает системный блок персональной электронно-вычислительной машины (ПЭBM), графический ускоритель, устройство обработки звука, группу цифровых и аналоговых выходов, группу цифровых и аналоговых входов. При этом подставка кинопроектора, пульт управления, мостик управления, кинопроектор, шкаф устройства отображения информации, киноэкран, блок питания кинопроектора, стойка питания, фильмостат из тренажера исключаются.
Изобретение поясняется чертежом, на которой представлена функциональная схема, где:
1. Кабина.
2. Компьютерный монитор.
3. Головные телефоны.
4. Контрольно-измерительные приборы и световые индикаторы.
5. Клавиатура.
6. Датчики положения органов управления.
7. Манипулятор.
8. Динамическая платформа с приводом.
9. Блок согласующих устройств (БСУ).
10. Вычислитель.
11. Устройство обработки звука.
12. Группа цифровых и аналоговых выходов.
13. Группа цифровых и аналоговых входов.
14. Системный блок ПЭВМ.
15. Графический ускоритель.
16. Принтер.
17. Блок питания аппаратуры,
18. Аппаратная стойка.
Кабина 1, как на тренажере аналоге, предназначена для имитации отделения управления механика-водителя, имитации положения обучаемого в соответствии с профилем местности в плоскостях, имитируемых динамической платформой выдачи управляющих сигналов с датчиков положения органов управления. В кабине размещены все элементы, как на тренажере-аналоге, и дополнительно манипулятор и клавиатура. Кабина закрепляется на динамической платформе.
Компьютерный монитор 2, любой ударопрочный монитор для ПЭВМ, выдерживающий импульсное ускорение не менее l0g, воспроизводящий изображение синтезируемой местности с разрешением не менее 800х600 64 тыс. цветов с частотой не менее 70 Гц, например, типа SVGA 17. Устанавливается на кабину, снаружи, перед прибором наблюдения.
Головные телефоны 3, например штатный шлемофон с головными телефонами.
Контрольно-измерительные приборы и световые индикаторы 4 - штатные с боевой машины.
Клавиатура 5, стандартная, для ПЭВМ, например, Microsoft РS/2. Размешается в кабине.
Датчики положения органов управления 6 предназначены для формирования и выдачи сигналов о положении органов управления движением машины и работе ее систем и агрегатов. Они подразделяются на концевые (вкл. - откл.) и датчики угловых положений. Концевые датчики аналогичны имеющимся в тренажере-аналоге. Датчики угловых положений отличаются тем, что выполнены по принципу задействования не всего диапазона поворота потенциометра на входное угловое перемещение, что позволило увеличить надежность датчика и облегчить его настройку.
Манипулятор 7 типа "Мышь", стандартный, для ПЭВМ, например, Microsoft PS/2. Размещается в кабине.
Динамическая платформа 8, например, как на тренажере аналоге, предназначена для имитации колебаний, возникающих при движении машины в соответствии с имитируемой визуальной обстановкой, в зависимости от количества ее степеней свободы. Закрепляется на неподвижном основании.
Блок согласующих устройств 9 предназначен для согласования входных и выходных, относительно ПЭВМ, сигналов. Он согласует по уровням сигналы: входные к ПЭВМ - цифровые сигналы кабины к уровню TTL, аналоговые сигналы к масштабу, отслеживаемому аналого-цифровым преобразователем (АЦП); выходные от ПЭВМ - цифровые сигналы уровня TTL к уровням потребителей кабины, аналоговые - к уровням потребителей, а сигналы, управляющие показаниями тахометра и спидометра, - для преобразования аналогового значения в частоту. Блок согласующих устройств выполнен из набора специализированных плат на микросхемах промышленного производства. Размещается в аппаратной стойке 18.
Вычислитель 10 представляет собой цифровое вычислительное устройство, предназначенное для синтезирования визуальной обстановки, наблюдаемой механиком-водителем при вождении, моделирования устройств, агрегатов и систем боевой машины, обеспечения работы обучающих программ и управления тренажером во всех режимах работы. В него включены системный блок ПЭВМ 14, графический ускоритель 15, группы цифровых и аналоговых входов 13 и выходов 12, устройство обработки звука 11, выполненные из плат, выпускаемых промышленностью серийно. Вычислитель устанавливается в аппаратной стойке 18.
Устройство обработки звука 11 предназначено для выдачи синтезированного звука в головные телефоны. Устройство выполнено на стандартной плате, например, Creative AWE 256.
Группа цифровых и аналоговых выходов 12 предназначена для обмена информационными сигналами между управляющей программой в вычислителе, аппаратурой кабины и динамической платформой. Для обучения вождению на всех типах боевых машин (БМ) достаточно наличия 8 АЦП, для управления контрольно-измерительными приборами, и 16 линий цифровых выходов стандарта TTL. Состоит из стандартных плат промышленного производства.
Группа цифровых и аналоговых входов 13 предназначена для обмена информационными сигналами между управляющей программой в вычислителе, аппаратурой кабины и динамической платформой. Для обучения вождению на всех типах БМ достаточно наличия 5 АЦП, для приема сигналов с датчиков угловых положений, и 40 линий цифровых входов стандарта TTL. Состоит из стандартных плат промышленного производства.
Системный блок ПЭВМ 14 стандартный, на базе микропроцессора не ниже Pentium 300, с оперативным запоминающим устройством не менее 16 Mb, с видеокартой не менее 1 Гб, например, с процессором Intel P-III-500, памятью 512Mb РC100, видеокартой SVGA S3 3D AGP 2Mb, винчестером 10GB.
Графический ускоритель 15 стандартный, поддерживающий стандарты трехмерной графики DirectX и OpenGL, например, 3D Accelerator 32 MB.
Принтер 16, например, HP Laser Jet. Устанавливается в аппаратной стойке 18.
Блок питания аппаратуры 17 - на базе стандартных элементов, аналогичен применяемому на кинотренажерах, но в него дополнительно установлены аккумуляторные батареи, и вместо линейного источника питания применен импульсный источник питания, аналогичный используемому в качестве источника питания в системном блоке ПЭВМ. Это позволило значительно уменьшить потребляемую мощность промышленной сети, сократить размеры блока питания и обеспечить бесперебойное питание аппаратуры при кратковременных отключениях от промышленной сети, а также работу аппаратуры в течение нескольких минут при ее отключении от промышленной сети на длительное время. Размещается в аппаратной стойке 18.
Аппаратная стойка 18 - сварная конструкция. Предназначена для компактной установки аппаратуры.
Установлена аппаратная стойка 18, в которой размещены: блок питания аппаратуры 17, БСУ 9, принтер 16 и вычислитель 10, в котором системный блок ПЭВМ 14 одним своим входом связан с одним выходом блока питания аппаратуры 17, другим входом связан с выходом манипулятора 7, третьим входом связан с выходом клавиатуры 5, а четвертым входом связан с выходом группы цифровых и аналоговых входов 13, которая своим входом связана с одним выходом БСУ 9, другой выход которого связан с входом контрольно-измерительных приборов и световых индикаторов 4; одним своим выходом системный блок ПЭВМ 14 связан с одним входом принтера 16, другой вход которого связан с другим выходом блока питания аппаратуры 17; другим выходом системный блок ПЭВМ 14 связан с входом графического ускорителя 15, выход которого связан с одним входом компьютерного монитора 2, другой вход которого связан с третьим выходом блока питания аппаратуры 17; третьим выходом системный блок ПЭВМ 14 связан с входом устройства обработки звука 11, выход которого связан с входом головных телефонов 3; своим четвертым выходом системный блок ПЭВМ 14 связан с входом группы цифровых и аналоговых выходов 12, которая одним выходом связана с одним входом БСУ 9, а другим выходом связана с одним входом динамической платформы с приводом 8, другой вход которой связан с четвертым выходом блока питания аппаратуры 17; пятый выход блока питания аппаратуры 17 соединен с другим входом БСУ 9, третий вход которого соединен с выходом датчиков положения органов управления 6.
Компьютерный тренажер начальной подготовки механика-водителя работает следующим образом:
обучаемый занимает место в кабине, включает выключатель "Масса", при этом напряжение от промышленной сети подается на блок питания аппаратуры 17, с него на питание вычислителя 10, принтера 16, компьютерного монитора 2, динамической платформы с приводом 8 и БСУ 9. По сигналам, формируемым вычислителем 10 на компьютерном мониторе 2, воспроизводится главное меню с режимами работы тренажера. С помощью манипулятора 7 обучаемый выбирает необходимый режим работы. Тренажер может работать в нескольких режимах. Например:
в режиме "Регистрация", с помощью клавиатуры 5, обучаемый вводит исходные данные в графы, например: подразделение, фамилия и инициалы, категория обучаемого, время года и другие;
в режиме "Энциклопедия", используя манипулятор 7, обучаемый выводит на экран компьютерного монитора 2 материал необходимой темы, соответствующей программе боевой подготовки по вождению, в том числе фотографическое изображение вида отделения управления боевой машины, наблюдаемого с места механика-водителя с активными зонами, дающими подсказки и консультации обучаемому, и изучает замемещение органов управления, необходимые усилия и рабочие движения, путем механического воздействия на них, необходимые для управления при запуске подогревателя, подготовке двигателя к запуску, его запуска и при вождении, а также теоретические основы по вождению боевых машин;
в режиме "Диалог" - "Запуск" в вычислителе 10 происходит моделирование агрегатов и систем танка, в том числе двигателя и подогревателя. На экране компьютерного монитора 2 отображается отделение управления машины, наблюдаемое обучаемым с места механика-водителя. Используя манипулятор 7, сигнал с которого поступает на вход системного блока 14, далее через графический ускоритель 15 на экран компьютерного монитора 2, обучаемый изучает алгоритм действий, воздействуя манипулятором 7 на активные зоны, высвечиваемые на экране, и практически выполняет запуск подогревателя, разoгрев двигателя, пуск, прогрев и проверку работы двигателя во всех режимах, остановку двигателя, воздействуя на соответствующие органы управления по заданию, отображаемому на экране монитора 2, используя подсказки обучающей программы. Сигналы с датчиков положения органов управления 6 поступают на вход в БСУ 9, согласовываются по уровням и поступают на вход группы цифровых и аналоговых входов 13, преобразуются и далее идут на вход системного блока ПЭВМ 14. Далее один сигнал с него идет через графический ускоритель 15 на компьютерный монитор 2, на котором при ошибочных действиях появляется подсказка об этом и рекомендация о выполнении правильного действия. Другой сигнал идет через устройство обработки звука 11, на головную гарнитуру 3, в которой обучаемый слышит звуки, характерные работе соответствующих агрегатов. Третий сигнал поступает через группу цифровых и аналоговых выходов 12 и БСУ 9 на контрольно-измерительные приборы и световые индикаторы 4, изменяет их показания и состояние в соответствии с режимом работы систем имитируемой ВМ;
в режиме "Диалог" - "Вождение" в вычислителе 10 происходит синтезирование визуальной обстановки местности, которая с помощью графического ускорителя 15 отображается на экране монитора 2; и имитирование БМ с моделированием работы ее систем и агрегатов. Имитируемая БМ имеет возможность перемещаться по синтезируемой местности в любом направлении, выбранном обучаемым без ограничения. Обучаемый по команде "Вперед", подаваемой в головные телефоны 3 через устройство обработки звука 11, используя соответствующие органы управления, начинает движение, двигается на различных режимах, преодолевает препятствия, сигналы с датчиков положения органов управления 6 поступают через БСУ 9 в группу цифровых и аналоговых входов 13, а затем в системный блок 14 вычислителя 10, в котором производятся вычисления и вырабатывается сигнал на начало движения и изменение визуальной обстановки, который через графический ускоритель 15 поступает на экран монитора 2 и обеспечивает изменение визуальной обстановки, наблюдаемой обучаемым в соответствии с условиями движения и характеристиками машины. Обучаемый следит за изменением визуальной обстановки в поле зрения прибора наблюдения и в зависимости от рельефа, дорожно-грунтовых условий и преодолеваемых препятствий выбирает маршрут движения и скорость передвижения. В соответствии с изменениями режима движения происходит изменение визуальной обстановки. Одновременно сигналы о режиме работы агрегатов, сформированные в системном блоке 14, поступают в устройство обработки звука 11 и далее в головную гарнитуру 3. Обучаемый слышит звуки, характерные для работы систем и агрегатов машины, в соответствующих режимах. Одновременно сигнал поступает на вход группы цифровых и аналоговых выходов 12, а с него на динамическую платформу с приводом 8 и через БСУ 8 на контрольно-измерительные приборы и световые индикаторы 4, происходит изменение положения кабины 1 и показаний контрольно-измерительных приборов 4. Каждый раз при допущении обучаемым ошибки с помощью запрограммированной системы объективного контроля и обучения в системном блоке 14 формируется сигнал об ошибке, информация о совершенной ошибке выдается в поле зрения обучаемого, на экране компьютерного монитора 2, в момент ее совершения в виде загорания индикаторной лампы. При необходимости, в зависимости от характера ошибки, дается краткая инструкция для ее устранения, все ошибки фиксируются в долговременной памяти в виде названия ошибки. Вождение может осуществляться как с включенным, так и с выключенным приводом динамической платформы 8;
в режиме "Экзамен" обучаемый самостоятельно производит запуск подогревателя, двигателя, трогание с места и вождение по выбранному маршруту в соответствии с заданным упражнением, без дополнительных инструкций и подсказок. Все действия обучаемого контролируются, а совершенные обучаемым ошибки фиксируются системой объективного контроля и обучения и заносятся в долговременную память, при этом информация об ошибках в поле зрения обучаемого в процессе выполнения упражнения не выдается. После выполнения упражнения обучаемому автоматически выставляется оценка, которая отображается на экране монитора 2 с характеристикой ошибок.
Результаты выполненного упражнения при необходимости распечатываются на принтере 16.
Каждый отдельный тренажер не будет иметь места инструктора и может функционировать автономно без инструктора либо в группе по 3-9 тренажеров, соединенных в компьютерную сеть с общим руководителем занятия (инструктором), который сможет взять на себя функции по установлению режима работы тренажера, работу в режиме "Регистрация", что позволит в 3-5 раз сократить количество инструкторов при обучении механиков-водителей вождению боевых машин.
Применение предлагаемого тренажера позволит более чем на 80% упростить функции инструктора по контролю и оценке действий обучаемого, повысить объективность контроля, обеспечить функциональную связь между действиями обучаемого и наблюдаемой им изменяемой визуальной обстановкой, в 2 раза ускорить процесс формирования правильных навыков вождения боевой машины; на 60% и более уменьшить существующий расход моторесурса боевых машин для обучения вождению.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ КИНОТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ ТАНКА | 2001 |
|
RU2189081C1 |
| ТАНКОВЫЙ ТРЕНАЖЕР | 1999 |
|
RU2166799C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2303294C2 |
| СИСТЕМА ДОРОЖНОЙ СИГНАЛИЗАЦИИ ТАНКА | 2001 |
|
RU2202758C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2306615C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2285958C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПОГРУЗКЕ БОЕВЫХ МАШИН НА СРЕДСТВА ПЕРЕПРАВЫ ЧЕРЕЗ ВОДНУЮ ПРЕГРАДУ | 2001 |
|
RU2204169C2 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ ОПЕРАТОРОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2024 |
|
RU2826147C1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
Изобретение относится к тренажерам для обучения механика-водителя бронированной гусеничной машины. В устройстве по сравнению с известными осуществлена замена кинопроектора и киноэкрана на компьютерный монитор, мостика управления с размещенными на нем и под ним пультом управления, шкафом устройства отображения информации - на программный модуль вычислителя на базе ПЭВМ с переносом туда же моделей агрегатов машины, линейного блока питания - на импульсный источник, задающей панели управления элементами - на меню ПЭВМ для ввода обучающей программы с автоматизированным обучением и объективным контролем процесса обучения. Тренажер характеризуется повышенным качеством обучения. 1 ил.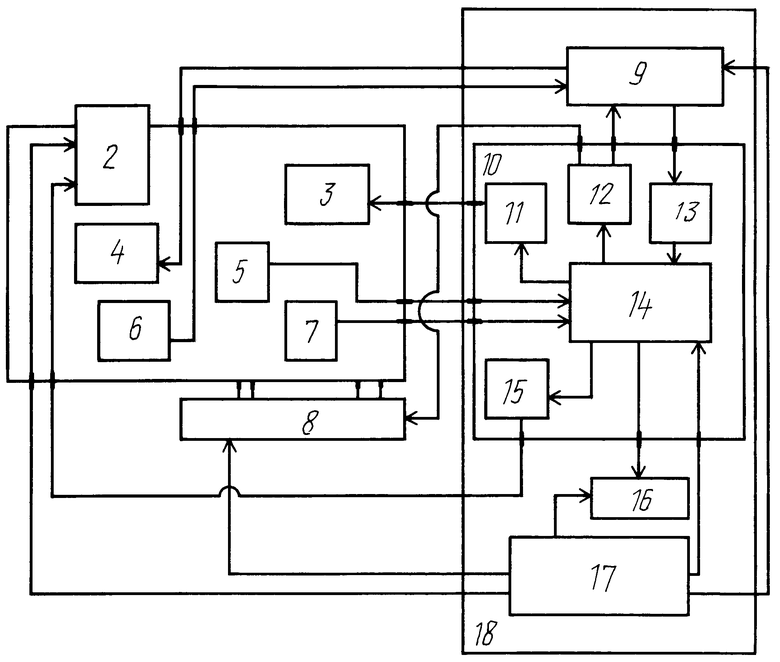
Компьютерный тренажер начальной подготовки механика-водителя, содержащий кабину в сборе, переговорное устройство, комплект монтажных частей, отличающийся тем, что установлена аппаратная стойка, в которой размещены: блок питания аппаратуры, блок согласующих устройств, принтер и вычислитель, в котором системный блок ПЭВМ одним своим входом связан с одним выходом блока питания аппаратуры, другим входом связан с выходом манипулятора, третьим входом связан с выходом клавиатуры, а четвертым входом связан с выходом группы цифровых и аналоговых входов, которая своим входом связана с одним выходом блока согласующих устройств, другой выход которого связан с входом контрольно-измерительных приборов и световых индикаторов, одним своим выходом системный блок ПЭВМ связан с одним входом принтера, другой вход которого связан с другим выходом блока питания аппаратуры, другим выходом системный блок ПЭВМ связан с входом графического ускорителя, выход которого связан с одним входом компьютерного монитора, другой вход которого связан с третьим выходом блока питания аппаратуры, третьим выходом системный блок ПЭВМ связан с входом устройства обработки звука, выход которого связан с входом головных телефонов, своим четвертым выходом системный блок ПЭВМ связан с входом группы цифровых и аналоговых выходов, которая одним выходом связана с одним входом блока согласующих устройств, а другим выходом связана с одним входом динамической платформы с приводом, другой вход которой связан с четвертым выходом блока питания аппаратуры, пятый выход блока питания аппаратуры соединен с другим входом блока согласующих устройств, третий вход которого соединен с выходом датчиков положения органов управления.
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ ТАНКА | 1990 |
|
RU2009544C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 1997 |
|
RU2113016C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2155991C1 |
| Свинцовый патрубок для свинцового трубопровода | 1929 |
|
SU14402A1 |
| НИТЕВОДИТЕЛЬ К КРЕСТОМОТАЛЬНОЙ МАШИНЕ | 1926 |
|
SU6459A1 |

