Изобретение относится к области точного машиностроения, в частности к пьезоэлектрическим двигателям, и предназначено для использования в робототехнике, станкостроении и других областях при микро- и наноскопическом прецизионном перемещении различных рабочих органов и (или) инструментов.
Известны различные пьезоэлектрические двигатели для прецизионного перемещения рабочих органов и (или) инструментов.
В частности, в техническом решении по пат. США №5939816, H 01 L 41/08 (310/328) от 17.08.1999 г. пьезоэлектрический двигатель содержит корпус с отверстием, платформу с установочным суппортом и пьезоэлектрический привод. Названный привод содержит линейные пьезоэлектрические элементы, механически контактирующие с поверхностью платформы и обеспечивающие за счет сил трения сдвиговые элементарные микроперемещения платформы. Конструктивно пьезоэлектрический привод выполнен в виде группы пьезоэлектрических биморфов. При механическом контакте с платформой группа биморфов обеспечивает ее вращение или перемещение либо вращение со сдвигово-тангенциальным перемещением при сферической форме платформы.
При выполнении платформы в виде поверхности вращения биморфы расположены в декартовых плоскостях, проходящих через плоскости симметрии тела вращения (платформы). В статическом состоянии на платформу действуют как сила тяжести, так и сила трения между ней и биморфами. При регулировании силы трения между поверхностью вращения и биморфом происходит мгновенное изменение результирующей силы, которая влияет на положение платформы и тем самым снижает надежность и точность микро- или наноскопического перемещения рабочего органа.
Известно также техническое решение (см.пат. США №5696421, H 01 L 41/08 (310/328) от 17.12.1997 г.), содержащее корпус, платформу с установочным суппортом, пьезоэлектрический привод платформы, которая выполнена по форме сферической поверхности (Фиг.1). Каждый пьезоэлемент соединен со схватом, имеющим фрикционный элемент, взаимодействующий с поверхностью платформы, при этом каждый схват образован в виде установленного в корпусе осеобразующего узла с подшипником вращения. Схваты расположены оппозитно по отношению к поверхности вращения платформы и в ортогональных плоскостях, проходящих через ось симметрии платформы. Таким образом, каждая пара осеобразующих узлов схватов определяет соответствующую ортогональную ось вращения платформы. В каждый момент времени платформа контактирует либо со всеми четырьмя осеобразующими узлами через их фрикционные элементы, при этом платформа находится в состоянии покоя, либо двумя осеобразующими узлами, при этом платформа может вращаться вокруг заданной оси. При таком выполнении пьезоэлектрического двигателя повышается стабильность положения платформы в пространстве, в отличие от ранее указанного технического решения.
Основным недостатком пьезоэлектрического двигателя по пат. США 5946521 является наличие в конструкции схватов осеобразующих узлов с подшипниками вращения, что вносит во вращательное движение платформы неконтролируемые погрешности, возникающие в результате неконтролируемых взаимных перемещений составных частей подшипника по углу поворота, что приводит к нарушению надежности позиционирования платформы, а следовательно, и установочного суппорта.
Таким образом, указанный уровень техники свидетельствует о том, что известные пьезоэлектрические двигатели не обеспечивают надежности позиционирования, а следовательно, заданной точности перемещений, что существенно при микро- и наноскопическом прецизионном перемещении различных рабочих органов или инструментов.
В качестве ближайшего аналога заявляемого технического решения выбрано известное техническое решение по пат. США №5696421.
Задача изобретения состояла в создании пьезоэлектрического двигателя, обеспечивающего достижение технического результата по улучшению надежности и точности позиционирования при микро- и наноперемещениях.
Поставленная техническая задача достигается тем, что в пьезоэлектрическом двигателе, содержащем корпус с отверстием, платформу, установочный суппорт, пьезоэлектрический привод, который выполнен в виде двух пар схватов, каждый из которых имеет фрикционный элемент для взаимодействия с платформой и пьезоэлемент линейного перемещения, схваты каждой пары оппозитно расположены по отношению к платформе, при этом каждая пара схватов размещена в соответствующей ортогональной плоскости, проходящей через ось симметрии платформы, последняя расположена в зоне отверстия корпуса, согласно изобретению платформа выполнена в виде двух одинаковых поярусно расположенных пластин с отверстиями, между пластинами размещены две пары кольцевых сегментов, каждая из которых расположена в соответствующей ортогональной плоскости, на боковых поверхностях кольцевых сегментов выполнены кольцевые канавки, каждый схват снабжен тремя пьезоэлементами и имеет буртик, с которым соединены две поярусно расположенные упругие пластины, каждая из которых имеет вырез со стороны их консоли, противолежащей буртику, и фрикционные элементы, обращенные друг к другу в зоне выреза, названные пластины связаны между собой в зоне, примыкающей к буртику, пьезоэлементом, а в зоне выреза свободные концы каждой пластины соединены между собой пьезоэлементами, при этом корпус снабжен оппозитно расположенными в зоне его отверстия держателями, с которыми через их буртики соединена одна пара схватов, взаимодействующая через фрикционные элементы их пластин с кольцевыми канавками сегментов, ориентированных в одной из ортогональных плоскостей, а буртики другой пары схватов соединены с установочным суппортом и взаимодействуют фрикционными элементами их пластин с кольцевыми канавками второй пары сегментов, ориентированными в другой ортогональной плоскости.
Согласно изобретению, фрикционные элементы выполнены в виде вставок, установленных на пластинах схватов с возможностью их регулирования.
Согласно изобретению, поперечное сечение канавок сегментов имеет трапециидальную, коническую или прямоугольную форму.
Согласно изобретению, держатели выполнены скобообразными, свободные концы которых ориентированы к оси отверстия корпуса.
При реализации изобретения благодаря указанному выполнению платформы с кольцевыми сегментами, имеющими пазы, а также описанному выше выполнению пьезоэлектрического привода, схваты которого снабжены тремя пьезоэлементами и выполнены в виде поярусно расположенных упругих пластин, обеспечивается надежность фрикционного взаимодействия пластин схватов с платформой при регулируемом пошаговом механическом контакте фрикционных элементов с пазами сегментов, что повышает надежность и точность позиционирования установочного суппорта при микро- и наноперемещениях.
При анализе известного уровня техники не выявлено технических решений, имеющих аналогичную заявляемому техническому решению совокупность конструктивных признаков для достижения указанного технического результата, что свидетельствует о наличии в заявляемом техническом решении новизны и изобретательского уровня, соответствующих критериям изобретения.
Изобретение поясняется чертежами, где:
на фиг.1 показана общая схема пьезоэлектрического двигателя;
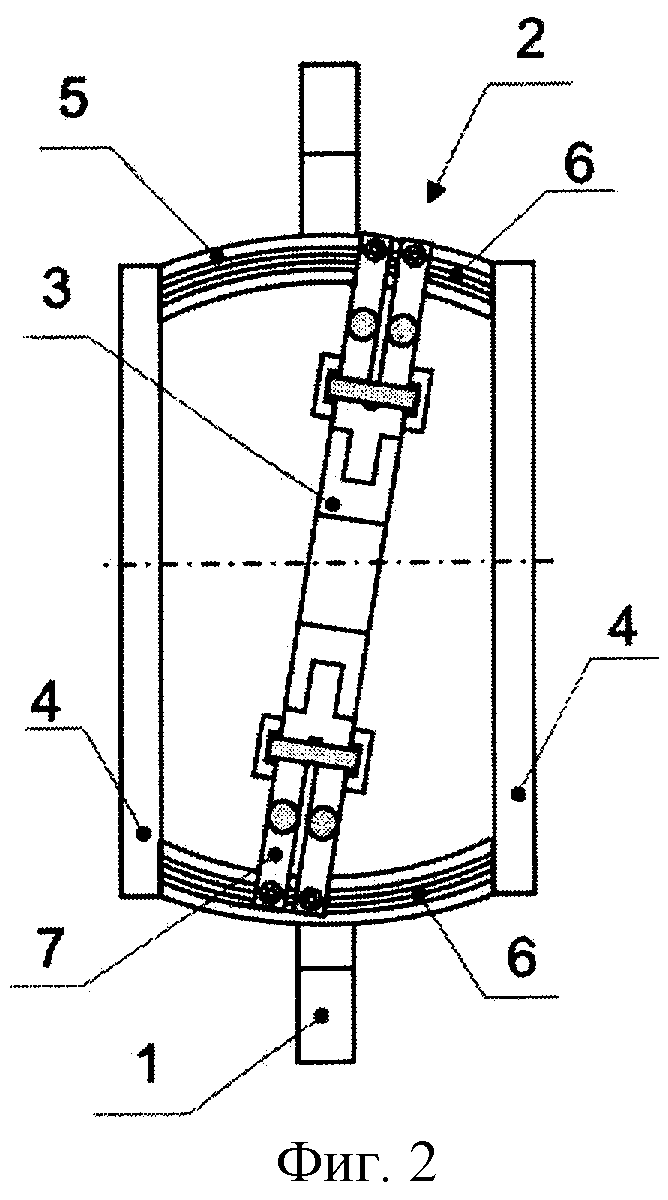
на фиг.2 - то же, что на рис.1, вид А без корпуса;
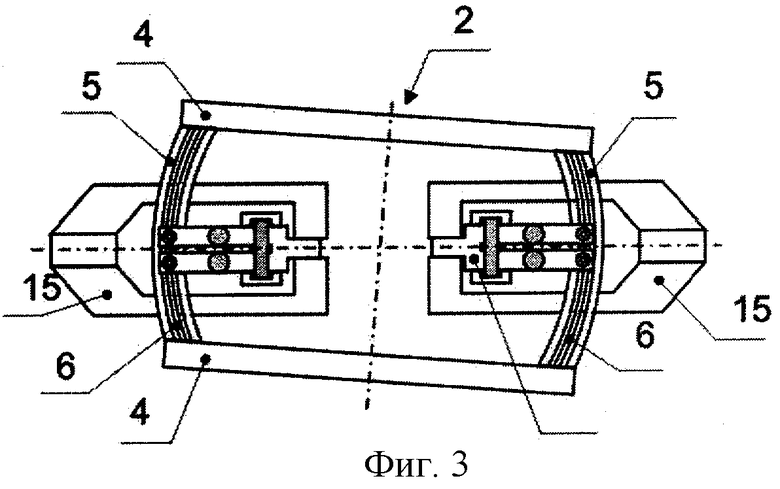
на фиг.3 - то же, что на рис.1, вид Б без установочного суппорта;
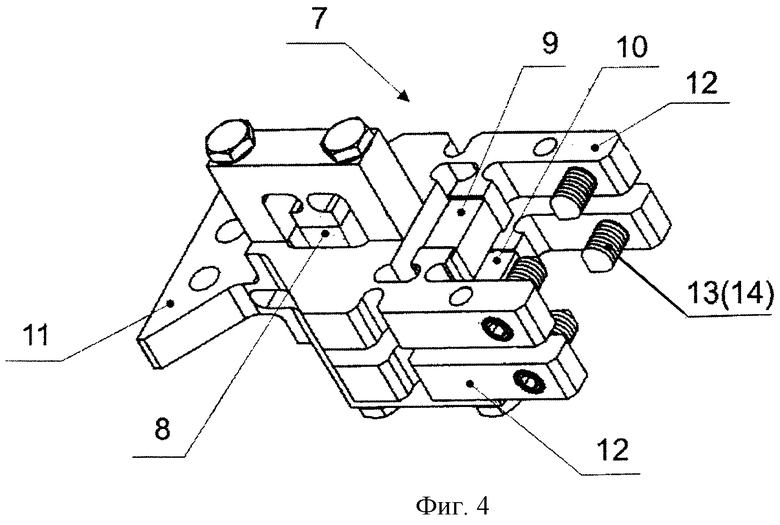
на фиг.4 приведено аксонометрическое изображение схвата;
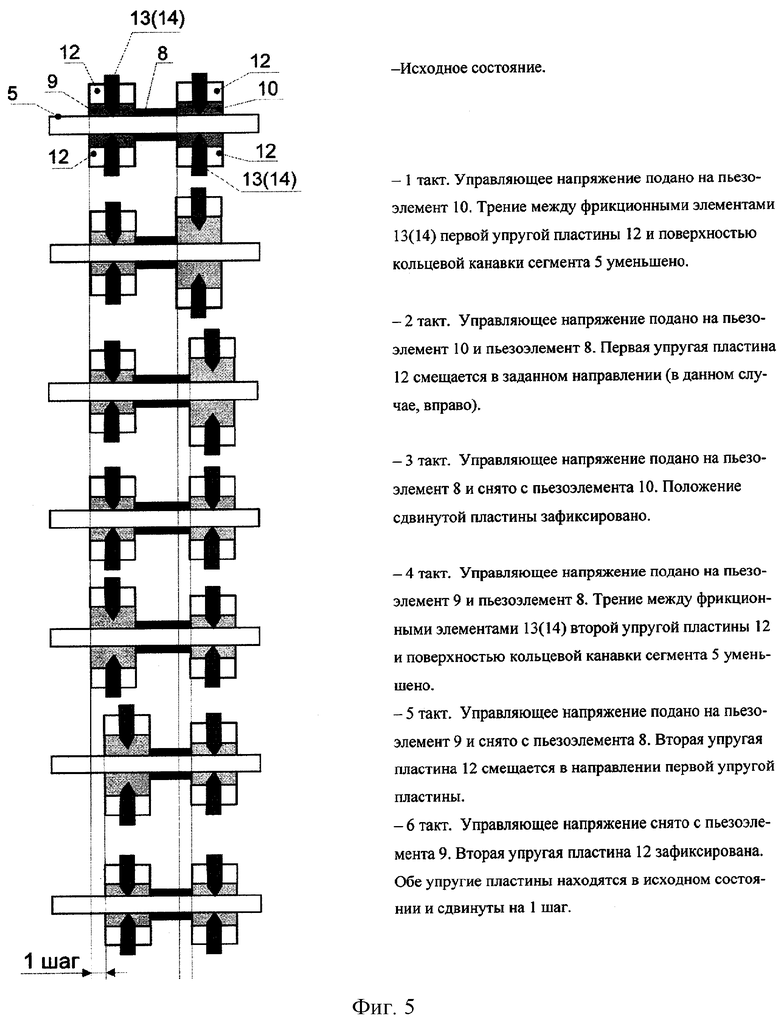
на фиг.5 приведена диаграмма перемещения схвата.
Пьезоэлектрический двигатель содержит корпус 1 с отверстием, платформу 2, установочный суппорт 3 для размещения рабочего органа или инструмента (не показано), пьезоэлектрический привод. Платформа расположена в зоне отверстия корпуса 1. Предпочтительно, корпус 1 выполнен в виде части цилиндра, имеющего установочные опоры для крепления на основании, например на станине (не показано).
Платформа выполнена в виде двух поярусно расположенных пластин 4 с отверстиями и двух пар кольцевых сегментов 5, размещенных между пластинами 4. Каждый сегмент 5 на противоположных его боковых поверхностях имеет кольцевые канавки 6. Кольцевые сегменты 5 соответствующей пары оппозитны по отношению друг к другу, а каждая пара сегментов 5 расположена в ортогональной плоскости I-I и II-II, проходящей через ось симметрии платформы.
Кольцевая канавка 6 может иметь в поперечном сечении трапециидальную, прямоугольную или коническую форму (не показано).
Пьезоэлектрический привод выполнен в виде двух пар схватов 7, схваты каждой пары оппозитно расположены по отношению к платформе 2, и каждая пара схватов размещена в соответствующей ортогональной плоскости I-I и II-II, проходящей через ось симметрии платформы.
Каждый схват 7 имеет три пьезоэлемента 8-10 линейного перемещения, буртик 11, с которым соединены две поярусно расположенные упругие пластины 12, каждая из которых имеет вырез со стороны консоли, противолежащей буртику, и фрикционные элементы 13, обращенные друг к другу в зоне выреза пластины.
Фрикционные элементы 13, предпочтительно, выполнены в виде вставок 14, установленных на пластинах схватов с возможностью их регулирования, например, посредством резьбового соединения. Возможны и другие варианты выполнения фрикционных элементов, например, за счет геометрической формы пластин 12 (не показано).
Поярусно расположенные пластины 12 каждого охвата соединены между собой в зоне, примыкающей к буртику, пьезоэлементом 8, а в зоне их вырезов свободные концы каждой пластины 12 охвата соединены между собой пьезоэлементами, соответственно, 9 и 10.
Корпус 1 снабжен оппозитно расположенными относительно оси его отверстия держателями 15. Каждый держатель 15, предпочтительно, выполнен в виде скобы, свободные концы которой ориентированы к оси отверстия корпуса 1. Возможен и другой вариант конструктивного исполнения держателя (не показано). Буртики 11 одной пары схватов 7 соединены с оппозитно расположенными держателями 15. Фрикционные элементы 14 пластин 12 схватов 7, соединенных с держателями 15, взаимодействуют с кольцевыми канавками 6 сегментов 5, ориентированных в одной из ортогональных плоскостей, например I-I.
Буртики 11 второй пары схватов 7 соединены с установочным суппортом 3 и взаимодействуют фрикционными элементами 14 их пластин 12 с кольцевыми канавками 6 второй пары сегментов 5, ориентированными в другой ортогональной плоскости, например II-II.
Установочный суппорт 3 предназначен для размещения на нем рабочего органа или инструмента соответствующего механизма или устройства, например обрабатывающего узла.
Пьезоэлементы 8-10 электрически связаны с управляющей системой, задающей алгоритм вращения установочного суппорта 3 (станка, измерительного зонда и т.п.).
При проектировании платформы, геометрических параметров ее пластин 4, их массы, а также аналогичных параметров кольцевых сегментов 5 учитывают:
- заданную геометрию корпуса и его отверстия;
- уравновешивание масс при балансировке платформы;
- конструктивно-технологические особенности изготовления кольцевых сегментов с канавкам и др. факторы, в том числе и материалы, влияющие на точность изготовления платформы.
При этом выполнение платформы в виде пластин с кольцевыми сегментами способствует снижению массы платформы и упрощает технологический процесс ее изготовления.
При проектировании схватов учитывают различные факторы, определяющие стабильность упругих свойств их пластин, устойчивость их фрикционных свойств и др.
Работа пьезоэлектрического двигателя осуществляется следующим образом.
Одно элементарное движение (шаг) двигателя состоит из 6 тактов (фиг.5).
В исходном состоянии фрикционные элементы 13(14) упругих пластин 12 каждого схвата 7 прижаты к поверхности кольцевых канавок соответствующего сегмента 5. Платформа находится в состоянии покоя за счет фрикционного взаимодействия пластин схватов с сегментами 5 платформы 2.
При подаче на пьезоэлемент электрического управляющего напряжения его длина увеличивается.
Электрическое напряжение подается на пьезоэлемент 9 (или 10) одной из пар схватов (в зависимости от заданного направления перемещения суппорта). При этом происходит отжим одной из упругих пластин 12 с фрикционными элементами 13 (14) от поверхности канавки 6 одного из сегментов 5. После этого подается управляющее напряжение на пьезоэлемент 8, соединяющий пластины 12 между собой, этого охвата, происходит смещение названной упругой пластины 12 вдоль канавки 6. После этого снимается напряжение с пьезоэлемента 9 (или 10) и положение фрикционных элементов данной пластины 12 фиксируется относительно канавки 6 сегмента 5. После этого подается электрическое напряжение на пьезоэлемент 10 (или 9) и последующее снятие напряжения с пьезоэлемента 8 обеспечивает перемещение второй пластины 12 данного охвата в направлении его первой пластины. После этого снимается управляющее напряжение с пьезоэлемента 10 (или 9) и положение второй пластины фиксируется аналогично первой пластине схвата.
Одновременно управляющие напряжения в аналогичной последовательности подаются на пьезоэлементы второго охвата, расположенного по отношению к первому в той же ортогональной плоскости. Это приводит к вращению платформы относительно корпуса в одной из плоскостей.
Вторая пара схватов работает аналогично. Подача управляющей последовательности напряжений на пьезоэлементы второй пары схватов позволяет вращать суппорт относительно платформы в другой ортогональной плоскости.
Обе пары схватов могут работать одновременно, при этом происходит одновременное вращение платформы и суппорта в обеих ортогональных плоскостях.
Таким образом, при заданной последовательности подачи управляющих напряжений на пьезолементы схватов обеспечивается пошаговое регулируемое микро- или нановращение платформы с установочным суппортом.
При этом благодаря выполнению каждого схвата в виде двух поярусно расположенных упругих пластин обеспечивается надежность фрикционного взаимодействия их с кольцевыми сегментами платформы, что повышает точность позиционирования последнего с расположенным на нем рабочим инструментом. На улучшение прецизионного позиционирования существенное влияние оказывают и конструктивные особенности выполнения платформы, благодаря которым облегчается процесс шагового регулирования ее положения.
Изобретение может быть реализовано в различных областях техники, в том числе в станкостроении, приборостроении, например, при физических исследованиях поверхностных наноструктур, в микробиологии и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШВЕЙНАЯ МАШИНА ЗИГ-ЗАГ | 1989 |
|
RU2050425C1 |
| РЕЗИНОВАЯ ВИБРООПОРА | 2017 |
|
RU2653971C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО НА ОСНОВЕ МНОГОСЛОЙНОЙ АКТИВНОЙ БИМОРФНОЙ СТРУКТУРЫ | 1996 |
|
RU2099754C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2603353C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ВИБРОИЗОЛЯТОР С РЕЗИНОКОРДНОЙ ОБОЛОЧКОЙ | 2017 |
|
RU2651479C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
Изобретение относится к области точного машиностроения и предназначено для микро- и наноскопических перемещений различных объектов. Сущность: пьезоэлектрический двигатель содержит корпус с отверстием, платформу, установочный суппорт, пьезоэлектрический привод. Привод выполнен в виде двух пар схватов. Каждая пара схватов размещена в соответствующей ортогональной плоскости, проходящей через ось симметрии платформы. Платформа расположена в зоне отверстия корпуса и выполнена в виде двух поярусно расположенных пластин с отверстиями. Между пластинами размещены две пары кольцевых сегментов. Каждая пара сегментов расположена в соответствующей ортогональной плоскости. На боковых поверхностях сегментов выполнены кольцевые канавки. Каждый схват снабжен тремя пьезоэлементами и имеет буртик, с которым соединены две поярусно расположенные упругие пластины с вырезами и фрикционными элементами. Пластины каждого охвата связаны между собой первым пьезоэлементом. Концы каждой пластины охвата соединены вторым и третьим пьезоэлементами. Корпус снабжен держателями, с которыми соединена одна пара схватов, взаимодействующая через фрикционные элементы их пластин с кольцевыми канавками сегментов. Вторая пара схватов через буртики соединена с установочным суппортом и взаимодействует фрикционными элементами с кольцевыми канавками другой пары сегментов, ориентированными в другой ортогональной плоскости. Технический результат: повышение надежности и точности позиционирования. 3 з.п. ф-лы, 5 ил.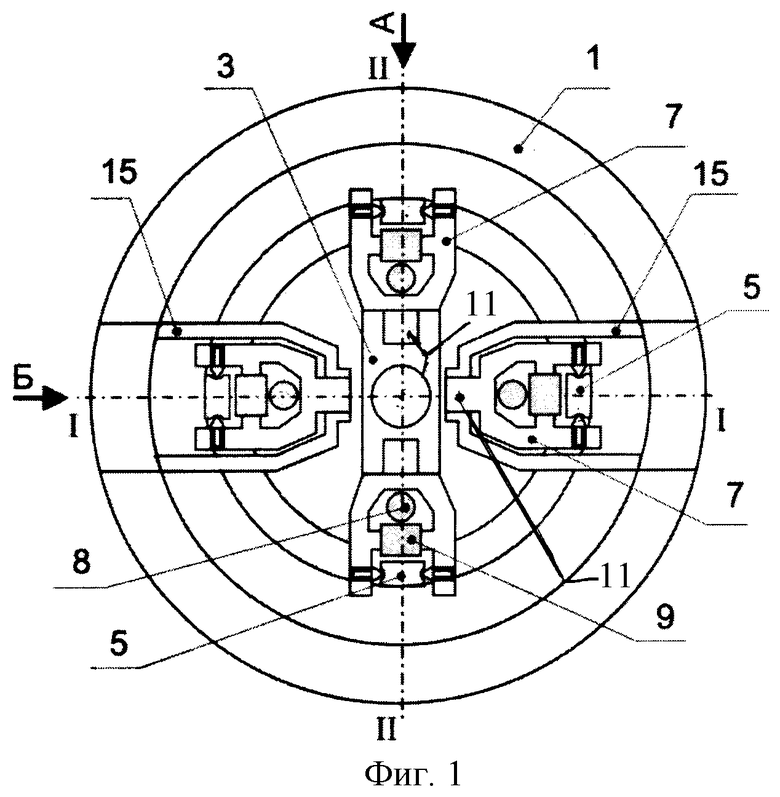
| Пьезоэлектрический шаговый привод малых угловых перемещений | 1977 |
|
SU711649A1 |
| Шаговый двигатель для прецизионного перемещения | 1978 |
|
SU771771A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| US 5696421 A, 09.12.1997 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

