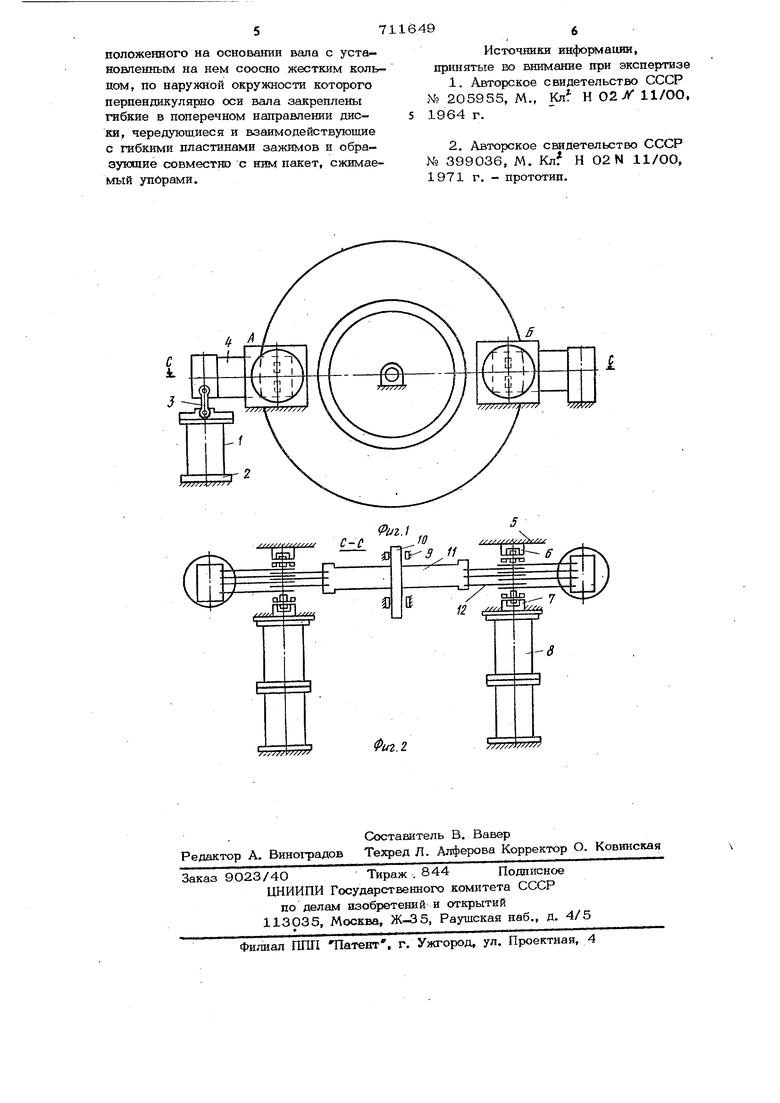
направлении диски, чередующиеся и взаимодействующие с гибкими пластинами зажимов и образующие совместно с ними пакет, сжимаемый упорами. Диски и пластины зажимов вьшопнены из стали. На фиг. 1 представлена конструкция привода малых угловых перемещений, а на фиг. 2 - вид его по С-С.
Привод состоит из пьезоэлектрического стержневого приводного преобразователя 1, к торцам которого клеем закреплены изоляторы 2, связанные с одного торца посредством шарнира 3 с взаимофиксированными торцами набора гибких пластин 4 зажимов А и Б, с другого торца - с основа1шем 5. щархшра 3 обеспечивает возможность преобразова1шя поступательног перемещения от преобразователя 1 во вращательное движение подвижного, узла привода. В состав зажимов, кроме пластин 4, входит неподвижньгй роликовый упор 6, подвижный роликовый 5шор 7 и пьезоэлектрические элементы 8, Подвижный узел привода представляет собой установленный на основании 5 в опорах 9 вал 10 с жестким кольцом 11 и гибкими дисками 12.
Привод работает следующим образом.
В исходном, состоянии на гибкие диски 1 подвижного узла наложены гибкие пластины 4 зажимов А и Б, а на приводном пьезоэлектрическом преобразователе 1 отсутствует управляющий импульс. Для .осуществления, например, подачи влево управлшощий импульс напряжения поступает на приводной пьезоэлектрический преобразователь 1 и с опережением на пьезоэлектрические элементы 8 зажима Б. Пьезоэлектрические элементы 1 и 8 в соответствии с обратным пьезоэлектрическим эффектом укорачиваются, что приводит к перемещению зажима А в сторону оснрвания 5 и повороту на малый угол влево установленного в опорах 9 вала 1О совместно с жестким кольцом 11, пакетом чередующихся и взаимодействующих гибких дисков 12, а также пластин 4, благодаря наличию неподвижного 6 и подвижного 7 роликовых упоров зажима А и подвижного в поперечном направлении шарнира Затем происходит наложение зажима Б и отпускание зажима А. При снятии управляющего импульса с приводаого пьезоэлектрического преобразователя 1 он принимает прежние размеры и пере1мещает набор пластин 4 в исходаое ссхзтояние. С н:аложением зажима А заканчивается цикл работы привода и он готов к отработке следующего импульса. Для поворота подвижного узла вправо порядок работы зажимов А и Б меняется на обратный. Вьшолнение зажимов многопластинчатыми позволяет резко увеличить площадь контакта с подвижным узлом, исключить возможность взаимного проскальзывания и повысить величину возможного усилия, передаваемого от приводного преобразователя на подвижный узел. Передача перемещения посредством сжимаемого пакета состоящего из стальных гибких непрерывных линейных дисков подвижного узла и аналогичных пластин зажимов, имеющих продольную жесткость в 300 500 раз больще высокую, чем их поперечная жесткость, позволяет исключить деформацию как подвижного уела так и приводного преобразователя при их Взаимодействии посредством зажимов и устранить ощибку перемещения, которая могла быть вызвана их взаимодействием. Наличие в Конструкции привода двух поочередно работающих зажимов и вала подвижного узла, установленного на основании в опорах качения, исключает возможность свобод1 ого перемещения подвиж11ого узла относительно приводного преобразователя и ПОЕЫ- щает точность работы привода. Выполнение кольца подвижного узла жестким позволяет исключить влияние крутящего момента со стороны нагрузки. Ввиду малого относительного удлинения пьезокерамики зажимы выполнены состоящими из набора собранных механически последовательно пьезоэлементов.
Формула изобретения
Пьезоэлектрический щаговый привод малых угловых перемещений, содержащий приводной электромеханический преобразователь, основание, подвижный узел и два зажима, отличающийся тем, что, с целью повышения точности работы, указанный- приводной преобразователь вьшолнен в виде стержня, связ.анного одним из торцов с основанием, а другим торцом посредством щарнирного элемента -- с одним из зажимов, тангенциально передающим перемещение от приводного преобразователя на вижный узел, выполненный в виде расположенного на основании вала с устаношенным на нем соосно жестким коль цом, по наружной окружности которого перпендикулярно оси вала закреплены гибкие в поперечном направлении диски, чередующиеся и взаимодействующие с гибкими пластинами зажимов и образующие совместно с ним пакет, сжимаемый упбрами. 9g Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 205955, М., Кл Е 02 J 11/00, 1964 г. 2. Авторское свидетельство СССР № 399036. М. Кл Н 02N 11/ОО, 1971 г. - прототип.

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый привод | 1976 |
|
SU570132A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| Прецизионный блокиратор комбинированного действия для пространственного блокирования вала | 2018 |
|
RU2674956C1 |
| Магнитострикционный привод | 1975 |
|
SU550268A1 |
| КОМПЕНСАТОР ПОПЕРЕЧНЫХ МЕТОДИЧЕСКИХ СДВИГОВ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2454679C1 |
| Установка для изготовления пакетов из термопластичных пленочных материалов | 1988 |
|
SU1565715A1 |
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| Устройство для сборки и сварки оребренных труб | 1980 |
|
SU927466A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЭЛЕМЕНТ ДЛЯ УСТАНОВКИ НА ГИБКОЙ БАЗОВОЙ СТРУКТУРЕ | 2016 |
|
RU2643941C1 |
