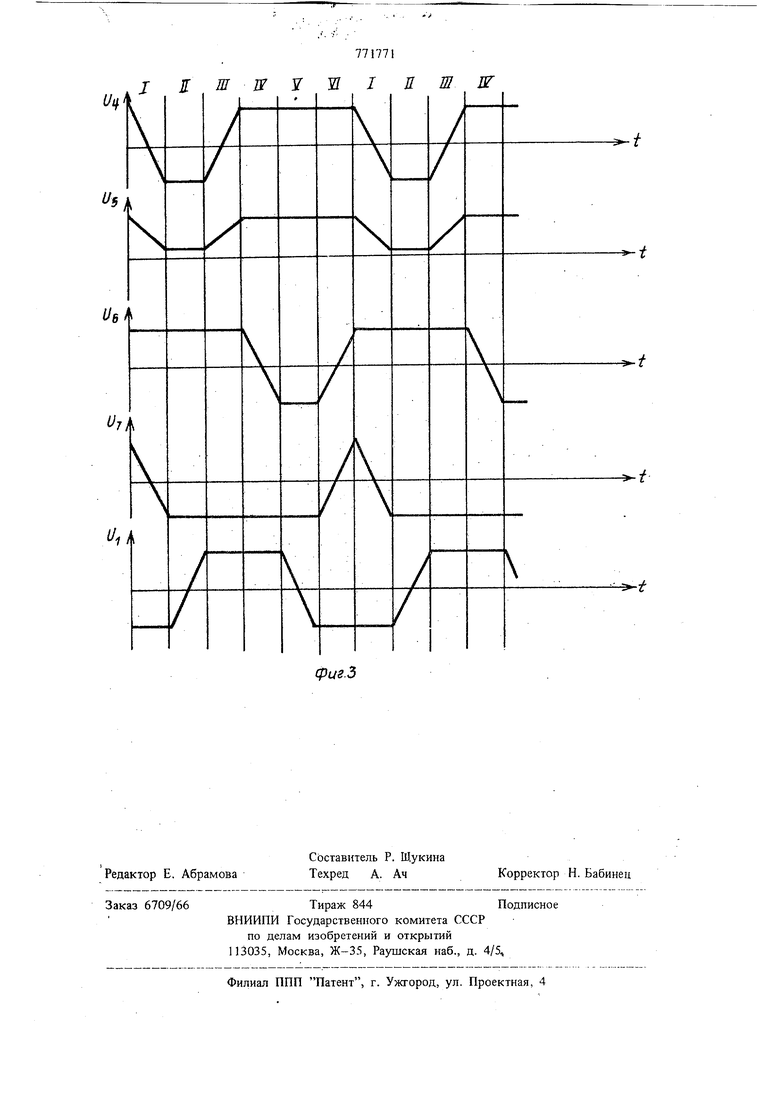
Изобретение относится к области электротехники, автоматики и может быть использовано как исполнительный элемент для прецизионных перемещений, например, в измерительных прибора, оптико-механических устройствах, оборудовании электронной промышленности, точном машиностроении. Шаговый двигатель для прецизионного перемещения по авт.св. № 674123 содержит две пло копараллельные направляющие, испогшительный пьезоэлемент, фиксаторы, мембраны, через которые передается усилие прижима каждого фиксатора к исполнительному элементу, дополнительный пьезоэлемент. Недостаток описанного устройства состоит в том, что конс1рукщ1я не позволяет осуществлять работу двигателя в шаговом режиме с поворотом но углу. Целью изобретения является расширение функциональных возможностей за счет обеспечения шагового режима с поворотом по углу. Указанная цель достигается тем, что введен Злок управления, регулирующий силу прижима каждого в отдельности фиксатора к накладкам исполнительного пьезоэлемента, причем фиксаторы контактируют с накладками исполнительного пьезоэлемента через шарнирно-закрепленные фланцы. На фиг. 1, .2 представлены две проекции. шагового двигателя; на фкг. 3 - временные диаграммы напряжений, управляющих работой фиксаторов и исполнительного пьезоэлемента в шаговом режиме с поворотом по углу. Двигатель содержит исполнительный пьезоэлемент 1, которого жестко соединены с накладками 2, имеющими две плоскопараллельные поверхности. Пьезоэлемент 1 с накладками 2 заключен между двумя плоскопараллельными направляющими 3, на которых с внеишей стороны установлены четыре фиксатора 4, 5, 6, 7, каждый из которых представляет собой пару фиксирующих элементов, установленных на соответствующей направляющей соосно друг с другом и соединенных с блоком управления (на фиг. не показан). Каждый из фиксирующих элементов помещен в металлический стакан 8, который жестко крепится к направляющей, снабженный юстировочиым устройством 9. Блок управления регулирует силу прижима каждого в отдельности фиксирующего элемента с накладками 2, которая передается через мембрану 10 и поворотный фланец 11, контактирующий с накладками исполнительного пьезоэлемента и способный вращаться вокруг продольной оси фиксатора благодаря шар1шриому закреплению 12. В делом мембрана 10 и фланед 11 служат для снятия касательных напряжений фиксирующего элемента, а также для обеспечения шагового режима с поворотом по углу. В качестве фиксирующих элементов могут быть использованы пьезоэлементы, магаитострикторы и т.д. На верхней поверхности 13 накладки 2 жестко закреплен одним торцом дополнительный пьезоэлемент 14, на втором торце которо го крепится приводной вал 15. В шаговом режиме с поворотом по углу двигатель работает следующим образом. С блока управления подаются напряжения в виде г сриодических импульсов, форма и . фазовые соотношения которых показаны на фиг. 3, где и. --напряжение на фиксаторе 4 . и .- напряжение па фиксаторе 5; Ug - на пряжение на фиксаторе 6; U,,. - напряжение на фиксаторе 7; U - напряжение на пьезоэлементе 1. В иачальньп момент работы па все фиксирующие элементы подается положительное напряжение и происходит зажатие накладок 2, на пьезоэлементе 1 при этом - отрицательное напряжение, и он находится в сжатом состоянии. На первом такте фиксаторы 4, 7 освобождают накладки 2, а на фикса торе 5 напряжение снижается (U. U., ), но U;- обеспечивает контакт фиксатора 5 с накладкой 2. На втором такте на пьезоэлемен 14 1 подается положительное напряжение, и происходит перемещение выходного вала с поворотом по углу в плоскости, параллельной направляющим 3, в направ1генни, указанном на фиг. 1 стрелкой. Поворот относительно продольной оси фиксатора 6, который находится в максимально фиксирующем состоянии, будет происходить за счет наличия шарнирно-закрепленкого фланца 11. Величрша поворота привошшго вала определяется соотношением U / L7 На третьем такте происходит зажатие накладок 2 фиксаторами 4, 5, а на четвертом такте фиксатор 6 освобождает накладки 2. На пятом такте за счет сжатия пьезоэлемента 1 подгягивается нижняя накладка 2, и на шестом такте фиксаторы 6, 7 зажимают накладки 2. Поворот в другую сторону, а также реверс осуществляются за счет соответствующего изме-. нения порядка работы фиксатороы 4, 5, 6, 7. Предлагаемый пмговый двигатель для прецизионного перемещения обладает более широкими ф пкциональными возможностями, что имеет большое значение для управляемых зеркал телескопов, сканирующих систем и других сш1усоидальных К1шематических механизмов. Формула изобретения Шаговый двигатель для прецизиопьюго перемещения по авт.св. № 674123, отличающийся тем, что,, с целью расширения фу п :циоиальных возможностей за счет обеспечения шагового режима с поворотом по углу, в него введен блок управления, регулирующий силу прижима каждого в отдельности фиксатора к накладкам исполнительного пьезоэлемента, причем фиксаторы контактируют с накладками исполнительного пьезоэлемента чфез щарнирно-закрепленные фланцы. 5 S
фаг. 10
j imjs iJLTHiS
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый двигатель для прецизионного перемещения | 1978 |
|
SU674123A1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2291551C2 |
| Шаговый двигатель | 1977 |
|
SU738016A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2161364C2 |
| УСТРОЙСТВО ЛИНЕЙНЫХ ПРЕЦИЗИОННЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1990 |
|
RU2017313C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Линейный шаговый пьезоэлектрический двигатель | 2019 |
|
RU2727610C1 |

t
сриг.З
