Изобретение относится к тяговым и транспортным машинам, рельсовым и безрельсовым, колесным и гусеничным, электровозам, тепловозам и газотурбовозам, автомобилям всех видов, преимущественно большегрузным внедорожным, строительно-дорожным и сельскохозяйственным машинам и тракторам с автоматически управляемыми бесступенчатыми трансмиссиями.
В известном устройстве автоматического регулирования тяговой машины с бесступенчатой трансмиссией [1] система автоматического регулирования содержит по крайней мере один регулятор, связанный с объектом регулирования в трансмиссии, соединенный с регулятором блок сравнения, со входами которого связаны функциональные блоки формирования сигнала управления и сигнала задания, связанные с системой измерения параметров нагрузки и управления, включающей датчик буксования. Достоинством этого устройства является возможность приспосабливаться к изменению внешних силовых факторов движения, недостатком - жесткое задание уставок регулирования, не позволяющее приводу машины приспосабливаться к изменению условий движения.
Управление скоростью движения машины в этом устройстве водитель осуществляет посредством воздействия на орган управления, обычно - контроллер управления или педаль газа, задавая их положением уровень значений параметров тяговой характеристики машины, обеспечиваемый работой системы ее автоматического регулирования. Таким путем водитель через управление двигателем машины управляет трансмиссией, задавая командные параметры работы (уставки) системе автоматического регулирования, работа которой протекает в условиях наблюдения, преобразования и обработки внутренних параметров работы машины и ее трансмиссии. Сигнал задания регулирования определяется в этом устройстве степенью воздействия водителя на орган управления в пределах максимального значения уставки, задаваемого постоянной так называемой заводской настройкой, рассчитанной на обычные, стандартные условия движения в окружающей среде.
Недостатком этого известного устройства системы автоматического регулирования является то, что регулирование с его использованием обеспечивает порядок только обычного автоматического управления и регулирования бесступенчатых трансмиссий тяговых и транспортных машин, гарантирующего им достаточно высокие эксплуатационные характеристики. В этих стандартных условиях машина с такой уставкой регулирования будет обладать максимальными динамическими возможностями при трогании и в движении. Однако возможны случаи необычных условий, когда сцепление колес с дорогой слабое или повышенное. В таких условиях, когда водитель нажмет педаль до конца, система автоматического регулирования установит максимально возможную расчетную силу тяги. Если она превышает возможности сцепления, начнется разносное буксование. Не эффективно также разгоняться или ехать в гору на пониженной тяге, если условия сцепления лучше обычных и позволяют силу тяги прибавить. Таким образом, недостатком известного устройства является отсутствие приспособляемости регулирования к внешним условиям движения, отсутствие учета дорожных условий, приводящее к повышенному или недостаточному буксованию, снижению динамических качеств машины и к недоиспользованию сцепного веса.
Известны, кроме того, устройства измерения буксования движителей тяговых и транспортных машин, например отечественное устройство "Универсальная информационная система трактора" УИС [2], употребляющиеся в качестве элемента системы измерения машины, в том числе для измерения буксования. Недостатком этих устройств является то, что они способны измерять буксование только одной оси машины, в то время как буксуют все активные движители машины, и все по-разному.
Целью изобретения является повышение эффективности автоматического регулирования, обеспечение приспособляемости машины к условиям движения, повышение динамических свойств машины, защита машины от потери управляемости и предотвращение разносного буксования с учетом особенностей буксования всех буксующих движителей.
С этой целью устройство автоматического регулирования, содержащее по меньшей мере один регулятор, связанный с объектом регулирования в трансмиссии, соединенный с регулятором первый блок сравнения, со входами которого связаны функциональные блоки формирования сигнала управления и сигнала задания, блок измерения, включающий по меньшей мере один датчик буксования, и первый блок уставок регулирования, согласно изобретению дополнительно содержит связанные с первым блоком уставок регулирования посредством первого блока коммутации второй блок уставок регулирования и блок интегрирования, второй блок сравнения и блок преобразования, причем блок измерения содержит датчики буксования по числу приводимых движителей машины, а число входов блока преобразования равно числу датчиков буксования блока измерения, управляющий вход первого блока коммутации связан с упомянутым блоком измерения, один вход - со вторым блоком уставок регулирования, другой - с блоком интегрирования, вход которого соединен со вторым блоком сравнения, один вход которого связан со вторым блоком уставок регулирования, другой - с блоком преобразования, входы которого связаны с выходами блока измерения, причем первый блок уставок регулирования выполнен с возможностью динамического изменения хранимых в нем данных. Блок преобразования выполнен в виде функционального преобразователя, реализующего функцию
где Δ=[max(δ1...δi)-min(δ1...δi)] - размах буксовании движителей, Δзад - заданное значение размаха; k - коэффициент пропорциональности; δ1...δi - величины буксовании движителей машины, i - номера приводимых движителей. Блок преобразования включает блоки усреднения, выделения максимального сигнала, определения размаха сигналов, соединенные параллельно с блоком измерения, и второй блок коммутации, с одним входом которого связан блок усреднения, с другим - блок выделения максимального сигнала, а с управляющим входом - пороговый блок, связанный с выходом третьего блока сравнения, с первым входом которого связан блок определения размаха сигналов, число входов каждого из которых равно числу датчиков буксования в блоке измерения, соответствующие входы которых соединены между собой параллельно и подключены к выходам блока измерения, связанным с датчиками буксования, и второй блок коммутации, с одним входом которого связан выход блока усреднения, с другим - выход блока выделения максимального сигнала, а с управляющим входом - выход порогового блока, вход которого связан с выходом третьего блока сравнения, с одним входом которого связан выход блока определения размаха сигналов, а с другим - второй блок уставок регулирования.
Техническим результатом применения предложенного технического решения является существенное повышение эффективности автоматического регулирования средствами оптимизации, одним из которых является адаптивное регулирование, состоящее в корректировке настройки (уставки) максимальной силы тяги (снижении в случае плохих условий сцепления и повышении в случае очень хороших) в соответствии с условиями сцепления и пропорционально им с учетом буксования всех активных движителей машины.
Анализ патентной литературы, проведенный по МПК А 01 В 63, 69, В 60 К 41/12, В 60 К 41/18, B 60 L 15/00, G 05 B 13/00, 15/00, Н 02 Р 5/00,7/00 и 9/00, а также США кл. 74, 180, 280, 290 и 318, и анализ научно-технической литературы не выявили известности предлагаемой совокупности существенных признаков изобретения.
Сущность предлагаемого технического решения поясняется следующими чертежами.
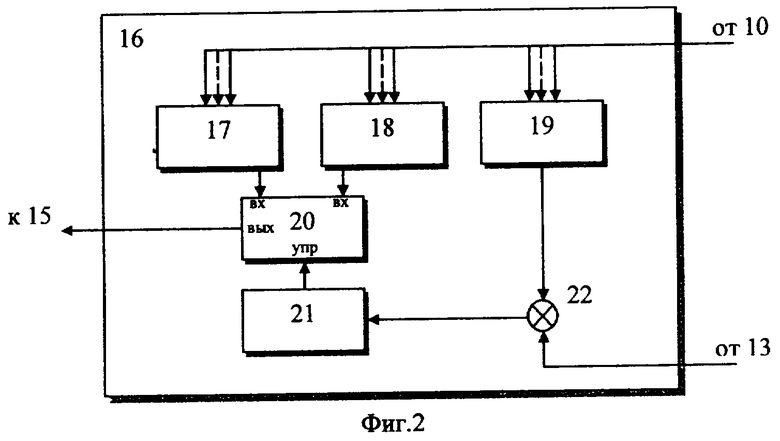
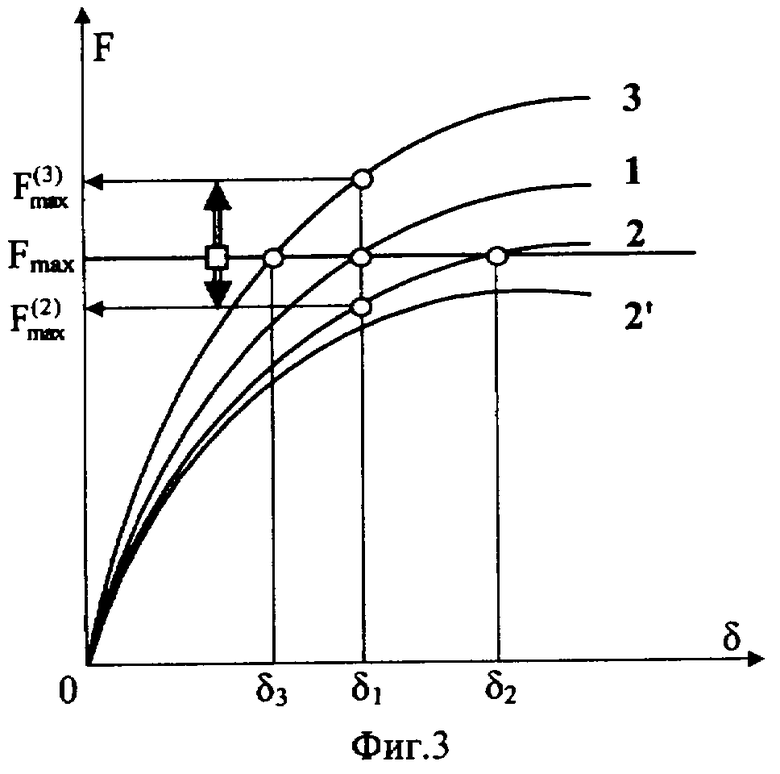
На фиг.1 показана структурная схема тягового привода машины с бесступенчатой трансмиссией и системой управления и автоматического регулирования; на фиг.2 - структурная схема блока преобразования системы управления и автоматического регулирования; на фиг.3 приведены зависимости силы тяги машины F от относительной скорости скольжения (буксования) движителей δ машины при разных ее весовых нагрузках и состояниях опорной поверхности.
Объект управления - трансмиссия 1 машины 2 управляется водителем путем воздействия им посредством органов управления 3 на систему автоматического регулирования 4, включающую канал адаптивного регулирования 5.
Система автоматического регулирования 4 содержит связанный с регулирующим входом объекта регулирования в трансмиссии 1 регулятор 6, соединенный с его входом первый блок сравнения 7, с одним входом которого связан функциональный блок 8 формирования сигнала задания iзад, с другим - функциональный блок 9 формирования сигнала управления iупр, которые оба связаны с блоком измерения 10, измеряющим параметры нагрузки, управления и движения, и для этого включающим датчики буксования (не показаны) по числу приводимых движителей, а функциональный блок 8, кроме того, связан с первым блоком уставок регулирования 11, выполненным с возможностью динамического изменения хранимых в нем данных, связанным с каналом 5 адаптивного регулирования, который в свою очередь связан с блоком измерения 10 непосредственно и посредством блока преобразования 16, входы которого связаны с выходами блока измерения 10.
Канал адаптивного регулирования 5 включает блок коммутации 12, связанный с первым блоком уставок регулирования 11, второй блок уставок регулирования 13, блок интегрирования 14, второй блок сравнения 15 и блок преобразования 16, причем управляющий вход блока коммутации 12 связан с блоком измерения 10, один вход - со вторым блоком уставок регулирования 13, а другой - с блоком интегрирования 14, вход которого соединен с выходом второго блока сравнения 15, один вход которого связан со вторым блоком уставок регулирования 13, другой - с блоком преобразования 16, входы которого связаны с выходами блока измерения 10, а сам блок преобразования 16 выполнен в виде функционального преобразователя, реализующего функцию
где Δ=[max(δ1...δi)-min(δ1...δi)] - размах буксовании движителей, Δзад - заданное значение размаха; k - коэффициент пропорциональности; δ1...δi - величины буксовании движителей машины, i - номера приводимых движителей.
Блок преобразования 16 при модульном исполнении включает блоки усреднения 17, выделения максимального сигнала 18, определения размаха сигналов 19, число входов каждого из которых равно числу датчиков буксования в блоке измерения 10 и соответствующие входы которых соединены между собой параллельно и подключены к выходам блока измерения 10, связанным с датчиками буксования, и второй блок коммутации 20, с одним входом которого связан выход блока усреднения 17, с другим - выход блока выделения максимального сигнала 18, а с управляющим входом - выход порогового блока 21, связанный входом с выходом третьего блока сравнения 22, с одним входом которого связан выход блока определения размаха сигналов 19, а с другим - второй блок уставок регулирования 13.
Предлагаемое устройство работает следующим образом.
Все наблюдаемые параметры системы (неуправляемые внешние воздействия X, управляемые параметры нагрузки Y и частично - управляющие воздействия U) измеряются блоком измерения 10 и составляют полную совокупность S информации о состоянии объекта. Среди прочих параметров нагрузки и управления измеряются сила тяги F машины 2; буксования движителей машины δi, где i - номера приводимых трансмиссией 1 движителей, буксования которых измеряются; степень воздействия водителя на орган 3 управления (контроллер управления или педаль газа): текущее нажатие на педаль α и событие максимального нажатия на педаль р(αmax).
После включения двигателя и системы автоматического регулирования и пуска привода приводимые трансмиссией 1 движители, развивая все вместе заданную нажатой до конца педалью и поддерживаемую системой автоматического регулирования пусковую силу тяги Fmax, максимально возможную по условиям расчета, приходят во вращение с буксованием δ (фиг.3).
Если состояние опорной поверхности соответствует расчетному (кривая 1 фиг.3), буксование также будет расчетным, равным δ1. Если же дорожные условия плохие (кривые 2 и 2'), буксование при силе тяги Fmax окажется повышенным δ2, вплоть до разносного при условиях, соответствующих кривой 2'. При условиях лучше расчетных (кривая 3) буксование при той же силе тяги Fmax окажется пониженным, равным δ3.
Если сцепление поверхности с движителями слабое (соответствует кривой 2), буксование окажется равным δ2 и будет превышать заданное значение δ1. Тогда канал адаптивного регулирования 5 начнет снижать уставку максимальной силы тяги Fmax до величины, равной F(2) max, при которой δ окажется равным δ1. Если же сцепление колес с поверхностью повышенное (кривая 3) и буксование после включения поэтому окажется равным δ3. При этом канал адаптивного регулирования 5 начнет увеличивать пусковую силу тяги до величины, равной F(3) max, при которой δ окажется равным δ1.
Сигналы, пропорциональные нагрузкам машины 2, силе тяги машины F в том числе, поступают с блока измерения 10 на функциональный блок 9 формирования сигнала управления, и при трогании и на низкой скорости движения последний формирует из них сигнал iупр, пропорциональный силе тяги F (iупр=kyF), который поступает на один вход блока сравнения 7, в котором сравнивается с поступающим на другой его вход сигналом задания iзад, сформированным функциональным блоком 8 формирования сигнала задания по поступающему на один его вход с блока уставок регулирования 11 максимальному сигналу уставки αmax и по поступающему на другой его вход с блока измерения 10 сигналу, пропорциональному степени α нажатия водителя на педаль 3. Таким образом, сигнал задания iзад, задающий значение силы тяги, пропорционален степени α нажатия водителя на педаль 3 при заданном максимальном значении уставки αmax (iзад=kзαmaxα). Результирующий сигнал сравнения iу поступает с выхода блока сравнения 7 на вход регулятора 6, и последний воздействует на объект регулирования в трансмиссии 1 таким образом, что развиваемая машиной 2 сила тяги устанавливается и поддерживается равной заданному водителем значению в течение всего процесса регулирования, продолжающегося все время трогания и разгона машины при наборе скорости движения и все время движения на низкой скорости.
Таким образом, при трогании и низкой скорости движения машины 2 система автоматического регулирования 4 осуществляет регулирование бессупенчатой трансмиссии на постоянство силы тяги F в соответствии с сигналом задания iзад, пропорциональным нажатию α водителя на педаль газа 3 и максимальному сигналу уставки αmax. При этом максимальная величина силы тяги Fmax задается жестко максимальным сигналом уставки αmax в соответствии с проектным расчетом и так называемой заводской настройкой, хранящейся в первом 11 и временно во втором 13 блоках уставок регулирования. Максимальный сигнал уставки αmax соответствует среднестатистическим обстоятельствам и условиям режима трогания и движения с малой скоростью при расчетных грузе машины и погодных условиях.
После запуска теплового двигателя и включения привода, в процессе трогания и разгона или снижения скорости движения машины 2, блок измерения 10 измеряет буксования движителей и формирует сигналы, пропорциональные буксованиям движителей машины 2 (всех приводимых или некоторых). Эти сигналы поступают в блок преобразования 16, где все они преобразуются соответствующей обработкой (усреднением или выделением максимального сигнала) в единый сигнал δ, поступающий на первый вход блока сравнения 15, на второй вход которого поступает со второго блока уставок регулирования 13 сигнал, пропорциональный заданному значению буксования δзад. Блок 15 сравнивает δ с заданным значением, сигнал сравнения интегрируется в блоке 14 и результирующий сигнал iкорр поступает на вход блока коммутации 12. При максимальном нажатии водителем на педаль управления 3 блок измерения 10 вырабатывает включающий сигнал р(αmax), поступающий на управляющий вход блока коммутации 12, последний переключается и подключает выход блока 14 ко входу блока уставок регулирования 11. В результате этого значение уставки регулирования в блоке 11 начинает меняться, вызывая изменение сигнала задания iзад и, следовательно, изменение значения силы тяги, в свою очередь вызывающее изменение буксования δ. Процесс его изменения продолжается до тех пор, пока буксование движителей не сравняется с заданным в блоке 13 значением δзад.
Блок преобразования 16 включает три блока дискриминаторов сигналов: блок усреднения 17, блок выделения максимального сигнала 18 и блок определения размаха сигналов 19, соединенные входами параллельно и подсоединенные ими к тем выходам блока измерения, на которых выделяются сигналы буксования всех активных движителей. Эти блоки одновременно определяют среднее значение буксовании (блок 17), максимальное значение (блок 18) и разницу Δ значений максимального и минимального из сигналов буксования (блок 19). Последний сигнал сравнивается в блоке сравнения 22 с хранящимся в блоке уставок 13 сигналом Δзад, пропорциональным заданной разнице буксовании. Если разница меньше заданной, пороговый блок 21 не подает сигнала на управляющий вход блока коммутации 20 и последний пропускает на свой выход и выход блока преобразования 16 (и на вход блока сравнения 15) сигнал блока 17 усреднения, пропорциональный среднему значению сигналов всех буксовании. Если разница больше заданной, пороговый блок 21 подает сигнал на управляющий вход блока коммутации 20, последний переключается и пропускает на выход блока преобразования 16 сигнал блока 18, пропорциональный максимальному из буксовании всех движителей. Таким образом, регулирование выполняется пропорционально среднему значению буксовании при небольшом их разбросе и пропорционально максимальному значению при большом, что гарантирует машину 2 от повышенного буксования любого из ее приводимых движителей.
При любом отклонении педали 3 от этого крайнего положения блок коммутации 12 отключает выход блока 14 от входа блока 11 и подключает к нему выход блока 13, в результате чего процесс изменения уставки прекращается и ее достигнутое значение запоминается до следующего полного нажатия водителем на педаль 3 или до отключения привода. При следующем включении привода блок 11 окажется соединен с блоком 13 блоком комммутации 12, вследствие чего уставка блока 11 окажется равна уставке, записанной в блоке 13.
Таким образом канал 5 адаптивного регулирования осуществляет адаптацию системы под реальные условия движения.
Канал адаптивного регулирования 5 функционально представляет собой систему низкого уровня, имеющую целью регулирование уставок основного канала системы автоматического регулирования 4, задаваемых блоком 11. Канал адаптации воздействует на блок уставок регулирования 11 системы автоматического регулирования 4, изменяя значение уставки αmax, и включается и выключается блоком коммутации 12 в работу основной системы автоматического регулирования 4 только при условиях, определяемых им на основании информации p(αmax) блока измерения 10. Канал адаптации 5 почти все время работы системы автоматического регулирования 4 находится в ждущем режиме, а работает периодически, с неопределенной периодичностью и длительностью, не прерывая и не нарушая порядок работы системы автоматического регулирования 4. В процессе настройки участвует вся системы автоматического регулирования 4, работающая в своем обычном порядке.
После окончания процесса адаптивной коррекции уставки максимальной силы тяги тяговые характеристики машины 2 соответствующим образом изменяются со всеми сопутствующими этому изменению результатами, а именно с пропорциональным изменением силы тяги при изменении нажатия на педаль газа 3 внутри нового диапазона (от вновь полученного, настроенного максимального значения Fmax при полном нажатии до нулевого значения при отсутствии нажатия). Новое значение границы запоминается до следующей инициации процесса адаптации очередным полным нажатием на педаль 3 и сбрасывается при выключении привода.
Таким образом, адаптация в зоне работы машины с постоянной силой тяги состоит в коррекции предельного, максимального значения задаваемой водителем величины силы тяги по достигнутой величине буксования. Процесс адаптации происходит при полном, предельном нажатии водителем на педаль и прекращается с запоминанием полученного в результате адаптации значения уставки при любом отклонении педали от этого крайнего положения.
Заявленное техническое решение является новым, соответствующим изобретательскому уровню и промышленно применимым.
Реализация заявленного технического решения предполагается на многоколесном внедорожном большегрузном полноприводном автомобиле специального назначения с тепловым дизельным двигателем, мотор-колесами и электрической бесступенчатой трансмиссией переменного тока с асинхронными двигателями и преобразователями частоты.
Источники информации, принятые во внимание
1. Новиков Г.В. Автоматическое регулирование тягового привода машин с бесступенчатыми трансмиссиями // "Тракторы и с.х. машины". №8, 2003, с.15-21.
2. Новиков Г.В., Хаби Г.В.С., Шипилевский Б. Универсальная информационная система трактора. // "Тракторы и с.х. машины", №11, 1994, с.23-26.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТЯГОВЫХ И ТРАНСПОРТНЫХ МАШИН | 2003 |
|
RU2284926C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ МНОГОПРИВОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2397893C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Автоматический тормозной привод колесной машины | 1990 |
|
SU1713843A1 |
| СИСТЕМА БЕЗУДАРНОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2004 |
|
RU2269709C1 |
| Аппарат на воздушной подушке с наземным движителем | 2015 |
|
RU2614459C1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЛАВНОСТИ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ГУСЕНИЧНЫХ И КОЛЕСНЫХ МАШИН | 2005 |
|
RU2285847C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ МНОГОПРИВОДНОГО КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2398149C1 |
Устройство содержит регулятор объекта регулирования трансмиссии, первый блок сравнения, блок формирования сигнала задания, связанный с первым блоком уставок регулирования, блок формирования сигнала управления, связанный с блоком измерения, включающим датчики буксования. Устройство также содержит дополнительный второй блок уставок регулирования и блок интегрирования, связанные с первым блоком уставок регулирования посредством первого блока коммутации, второй блок сравнения и блок преобразования сигналов, количество входов которого равно числу датчиков буксования. Технический результат изобретения состоит в достижении заданной величины буксования движителей при максимальной нагрузке машины как всех вместе, так и каждого в отдельности. 3 з.п. ф-лы, 3 ил.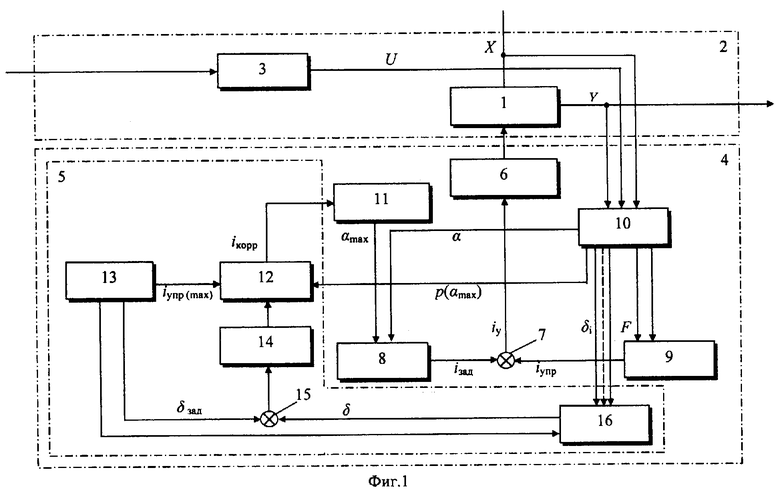
где Δ=[max(δ1...δi)-min(δ1...δi] - размах буксования движителей; Δзад - заданное значение размаха; k - коэффициент пропорциональности; δ1...δi - величины буксования движителей машины; i - номера приводимых движителей.
| Комбинированная приводная установка | 1989 |
|
SU1684106A1 |
| RU 2056306, 20.03.1996 | |||
| US 4459878, 17.07.1984 | |||
| DE 3415596, 31.10.1984. | |||

