Изобретение относится к области транспортного машиностроения, предназначено для автоматического адаптивного управления бесступенчатыми приводами трансмиссий многоприводных транспортных средств различного назначения, в т.ч. многоколесных, например автомобилей всех видов, тракторов, строительно-дорожных машин, и многих других видов транспортных и/или тяговых средств, трансмиссии которых содержат, как минимум, два привода его движителей с независимым управлением.
Известен способ автоматического адаптивного управления бесступенчатой, в частности гидрообъемной, трансмиссией (ГОТ) многоприводного транспортного средства, описанный в книге «Теория силового привода колес автомобилей высокой проходимости», авторы: С.Б.Шухман, В.И.Соловьев, Е.И.Прочко. / Под общей ред. д.т.н., проф. С.Б.Шухмана. - М: Агробизнесцентр, 2007 г. - С.283-292, основанный на том, что систему управления, реализующую этот способ, выполняют двухуровневой. С помощью нижнего уровня из трех вычислительных блоков регулируют передаточное отношение конкретного привода, входящего в состав ГОТ, управляя рабочими объемами гидромоторов одного моста и связанного с ними насоса. При этом проводят оценку близости буксования одного или обоих колес ведущего моста с целью уменьшения вероятности его возникновения и вычислительным блоком верхнего уровня определяют по положению органа регулирования подачи топлива величину крутящего момента, которым должен быть нагружен двигатель, а также его распределение по ведущим мостам автомобиля, формируя сигнал, корректирующий сигнал управления величиной передаточного отношения соответствующего привода ГОТ.
Недостатком такого способа управления является то, что в нем при регулировании передаточных отношений приводов, входящих в ГОТ, не проводится сравнение режимов работы этих приводов. При этом в ГОТ возможна циркуляция мощности, которая вызывает неравномерную загрузку приводов ведущих колес, а следовательно, дополнительные потери энергии.
Наиболее близким аналогом (прототипом) изобретения является способ автоматического адаптивного управления бесступенчатой трансмиссией многоприводного транспортного средства как ГОТ, так и с электроприводами (RU 2284926, 2006 г.). Согласно этому способу управление передаточными отношениями приводов, входящих в состав трансмиссии, осуществляют путем подачи на исполнительные органы управления каждого из приводов трансмиссии сигналов управления, которые формируют на основании разностных сигналов сравнения, получаемых путем измерения параметров, характеризующих текущий режим работы каждого привода трансмиссии, преобразования полученных результатов измерения в соответствующие сигналы и последующего сопоставления этих сигналов с базовыми сигналами, характеризующими принятые базовые значения этих параметров. При этом в качестве параметра, характеризующего условия движения машины, измеряют буксование ее движителей, величину которого сравнивают с базовой уставкой по этому параметру в виде установленного заранее расчетного интервала.
К недостаткам прототипа следует отнести сниженные точность и оперативность в управлении приводами трансмиссии, сложность оценки текущего значения буксования движителей машины из-за значительного влияния внешних факторов на точность измерения величин, необходимых для расчета буксования каждого движителя. Этим объясняются трудности в достижении заявляемой авторами приспособляемости машины к условиям движения и, следовательно, низкая эффективность способа.
Задача, решаемая изобретением, направлена на разработку способа, способствующего повышению эффективности многоприводного транспортного средства и улучшению приспособляемости машины к условиям движения.
Технический результат, получаемый при реализации изобретения, состоит в уменьшении потерь энергии за счет исключения вероятности возникновения в трансмиссии машины циркуляции мощности путем обеспечения необходимой загрузки приводов разных движителей многоприводного транспортного средства в зависимости от текущего режима его движения.
Для достижения технического результата в способе автоматического адаптивного управления бесступенчатой трансмиссией многопроводного транспортного средства, содержащей, как минимум, два привода активных движителей с независимым управлением, путем изменения их передаточных отношений в зависимости от отслеживаемых текущих величин параметров, указывающих на необходимость изменения режима работы трансмиссии, в частности частоты вращения вала двигателя транспортного средства, угла поворота рулевого колеса и положения педали акселератора, заключающемся в подаче на соответствующие исполнительные органы трансмиссии необходимых сигналов управления, которые формируют на основании разностных сигналов сравнения, получаемых путем измерения параметров, характеризующих текущий режим работы каждого привода, преобразования полученных результатов измерений в соответствующие сигналы и последующего сопоставления этих сигналов с базовыми сигналами, соответствующими принятым базовым значениям параметров, согласно изобретению измеряют параметры, определяющие момент, реализуемый на активных движителях, частоту их вращения, а также нормальное усилие в пятне их контакта с опорной поверхностью, за базовые сигналы, устанавливаемые отдельно по каждому из этих параметров, принимают средние для трансмиссии в целом сигналы, вычисляемые из усредненных за установленный операционный промежуток времени сигналов, соответствующих значениям одноименного измеренного параметра на каждом активном движителе, разностные сигналы сравнения по моментам, реализуемым на каждом активном движителе, получают путем сопоставления соответствующих усредненных сигналов с базовым сигналом по моменту с учетом усредненного сигнала, характеризующего нормальное усилие в пятне контакта конкретного движителя с опорной поверхностью, и базового сигнала по этому параметру для трансмиссии в целом, а разностные сигналы сравнения по частоте вращения каждого активного движителя получают путем сопоставления соответствующих усредненных сигналов с базовым сигналом по этому параметру с учетом сигнала, характеризующего угол поворота рулевого колеса, усредненного за тот же промежуток времен, при этом сигналы управления формируют по задаваемому в зависимости от типа соответствующего привода движителя функциональному соотношению полученных разностных сигналов сравнения и сигналов, характеризующих отслеживаемые параметры, указывающие на необходимость изменения режима работы трансмиссии, которые предварительно также усредняют за тот же операционный промежуток времени, и подают сигналы управления на исполнительные органы изменения величин передаточных отношений приводов с периодичностью, соответствующей упомянутому операционному промежутку времени, причем последний устанавливают, исходя из условий обеспечения требуемого быстродействия и устойчивости системы управления.
Дополнительные существенные отличия состоят в том, что:
- при формировании сигналов управления осуществляют их коррекцию по предварительно вычисленным приращениям их значений за предшествующий упомянутый операционный промежуток времени;
- на величину сигналов управления, поступающих на исполнительные органы изменения величин передаточных отношений приводов, накладывается ограничение по максимальной величине для уменьшения динамических нагрузок в трансмиссии при работе системы управления;
- в качестве параметра, определяющего нормальное усилие в пятне контакта ведущего колеса с опорной поверхностью, измеряют величину деформации упругого элемента подвески этого колеса;
- разностный сигнал сравнения Δуi1 по величине момента, реализуемого на i-м активном движителе, вычисляют по формуле:

где  - усредненный сигнал, характеризующий момент, реализуемый на i-м активном движителе;
- усредненный сигнал, характеризующий момент, реализуемый на i-м активном движителе;
у1cp - базовый сигнал, характеризующий среднее значение моментов, реализуемых на активных движителях транспортного средства;
 - усредненный сигнал, характеризующий величину нормального усилия в пятне контакта i-го активного движителя с опорной поверхностью;
- усредненный сигнал, характеризующий величину нормального усилия в пятне контакта i-го активного движителя с опорной поверхностью;
у3ср - базовый сигнал, характеризующий среднее значение нормальных усилий в пятне контакта всех активных движителей транспортного средства с опорной поверхностью;
- разностный сигнал сравнения Δуi2 по величине частоты вращения i-го активного движителя вычисляют по формуле:

где  - усредненный сигнал, характеризующий частоту вращения i-го активного движителя;
- усредненный сигнал, характеризующий частоту вращения i-го активного движителя;
у2cp - базовый сигнал, характеризующий среднее значение частот вращения активных движителей транспортного средства;
 - усредненный сигнал, характеризующий величину угла поворота рулевого колеса;
- усредненный сигнал, характеризующий величину угла поворота рулевого колеса;
 - функциональная зависимость, характеризующая необходимое отклонение требуемой частоты вращения активного движителя от принятого базового значения при движении транспортного средства по криволинейной траектории.
- функциональная зависимость, характеризующая необходимое отклонение требуемой частоты вращения активного движителя от принятого базового значения при движении транспортного средства по криволинейной траектории.
При этом в частных случаях реализации способа:
- для трансмиссии с гидрообъемными приводами движителей в качестве параметра, определяющего момент, реализуемый на активном движителе, измеряют давление, создаваемое основным насосом, а сигналы управления подают на входы устройств изменения рабочих объемов основного насоса и/или гидромотора;
- для трансмиссии с электроприводами движителей на основе трехфазного асинхронного тягового электродвигателя с короткозамкнутым ротором в качестве параметра, определяющего момент, реализуемый на активном движителе, измеряют ток фазы, а сигналы управления подают на вход пульта управления электродвигателем, формирующего этот ток фазы.
Результатом автоматического адаптивного управления по предложенному способу является повышение приспособляемости транспортного средства к условиям движения за счет коррекции передаточных отношений приводов активных движителей, входящих в трансмиссию многоприводного транспортного средства. При этом обеспечивается минимизация отклонений измеряемых параметров, характеризующих текущий режим работы привода каждого конкретного движителя, от значений, принятых за базовые для этого движителя в данных условиях движения машины. Достижение этого нормализует работу приводов трансмиссии, уменьшает нагруженность ее агрегатов, исключает возникновение циркуляции мощности в трансмиссии, а значит, снижает в ней потери энергии.
Сущность предлагаемого способа поясняется чертежами, где:
на фиг.1 дана примерная схема бесступенчатой трансмиссии многоприводного транспортного средства, содержащего, как минимум, два привода (П1, …, Пi) его активных движителей (Д1, …, Дi) с независимым управлением от системы автоматического адаптивного управления (СААУ);
на фиг.2 - функциональная блок-схема получения разностного сигнала сравнения по реализуемому моменту на 1-м активном движителе;
на фиг.3 - функциональная блок-схема получения разностного сигнала сравнения по частоте вращения 1-го активного движителя;
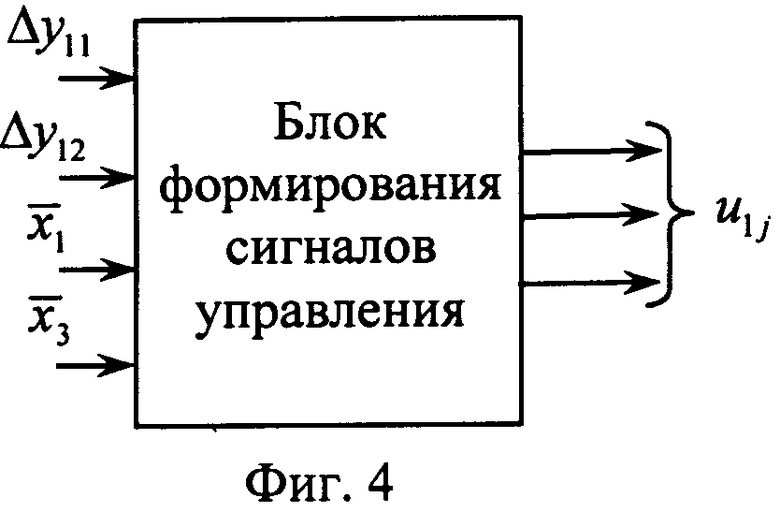
на фиг.4 - вариант блок-схемы получения сигнала управления передаточным отношением привода i-го активного движителя;
на фиг.5 приведены результаты математического моделирования, характеризующие работу СААУ, реализующей предлагаемый способ (а - график изменения моментов [кН·м], реализуемых на колесах ведущих осей, в функции времени [c]; б - график изменения параметров [-] регулирования рабочих объемов насосов и гидромоторов приводов гидротрансмиссии).
Бесступенчатая трансмиссия многоприводного транспортного средства (фиг.1) обеспечивает распределение мощности от энергоустановки (ЭУ) между его активными движителями (Д1, …, Дi). Для этого служат соответствующее количество приводов (П1, …, Пi) с независимым управлением от общей системы управления.
СААУ отслеживает текущие значения параметров (x1, …, xm), указывающих на необходимость изменения режима работы трансмиссии. В частности: x1 - это частота вращения вала двигателя транспортного средства, x2 - угол поворота рулевого колеса, x3 - положение педали акселератора, соответствующее желанию водителя изменить продольную скорость движения транспортного средства. К отслеживаемым параметрам могут относиться и другие в зависимости от типа транспортного средства и конструкции трансмиссии. Так, например, на транспортном средстве, оснащенном системой автовождения, в качестве отслеживаемых параметров СААУ могут быть: продольная скорость машины, расстояние до впереди движущегося автомобиля, неровности дороги и т.д.
В данном способе управления ведут измерения параметров (уi1, …, уik), характеризующих текущий режим работы каждого (i-го) привода трансмиссии. Эти параметры характеризуют: уi1 - момент, реализуемый на активном движителе; уi2 - частоту его вращения; уi3 - нормальные усилия в пятне его контакта с опорной поверхностью. В качестве параметра, определяющего нормальное усилие в пятне контакта ведущего колеса с опорной поверхностью, может быть измерена величина деформации упругого элемента подвески этого колеса, которую затем математическим путем преобразуют в упомянутый параметр.
В вариантах реализации изобретения в зависимости от типа привода в качестве параметра, определяющего момент, реализуемый на активном приводе, измеряют давление, создаваемое основным насосом (для трансмиссии с гидрообъемными приводами), или ток фазы (для трансмиссии с электроприводами).
Возможны варианты, когда при необходимости в зависимости от конструкции приводов могут вести измерение других параметров.
Каждые из сигналов, характеризующих отслеживаемые и измеряемые параметры, после поступления в СААУ усредняются в соответствующих интегрирующих блоках (фиг.2 и 3) за установленный операционный промежуток времени Δt=t2-t1 в соответствии с выражением:

где  - усредненное значение сигнала на интервале Δt;
- усредненное значение сигнала на интервале Δt;
x - текущее значение сигнала.
Таким образом, для каждого из отмеченных выше параметров в СААУ получают усредненные сигналы  или
или  (фиг.2-4) - это позволяет исключить недостаточно обоснованное срабатывание СААУ, т.к. практически все сигналы, поступающие на вход СААУ, имеют существенную нестабильность, обусловленную случайностью контролируемых процессов.
(фиг.2-4) - это позволяет исключить недостаточно обоснованное срабатывание СААУ, т.к. практически все сигналы, поступающие на вход СААУ, имеют существенную нестабильность, обусловленную случайностью контролируемых процессов.
По усредненным сигналам  , характеризующим измеренные одноименные параметры в разных приводах, вычисляют средние их значения для трансмиссии в целом, которые далее принимают за базовые сигналы
, характеризующим измеренные одноименные параметры в разных приводах, вычисляют средние их значения для трансмиссии в целом, которые далее принимают за базовые сигналы  (фиг.2, 3). И эти базовые сигналы используют для получения разностных сигналов сравнения Δуik для каждого привода по параметрам, характеризующим для данного активного движителя реализуемый момент Δуi1 и частоту вращения Δуi2.
(фиг.2, 3). И эти базовые сигналы используют для получения разностных сигналов сравнения Δуik для каждого привода по параметрам, характеризующим для данного активного движителя реализуемый момент Δуi1 и частоту вращения Δуi2.
Для получения разностного сигнала сравнения Δуi1 по параметру, характеризующему реализуемый момент на i-м активном движителе, используют соотношение:

Из формулы (2) видно, что базовый сигнал у1cp, характеризующий среднее значение моментов, реализуемых на активных движителях транспортного средства, при вычислении разностного сигнала сравнения по этому параметру для i-го движителя корректируется в зависимости от отношения усредненного сигнала  , характеризующего величину нормального усилия в пятне контакта этого движителя с опорной поверхностью, к базовому сигналу у3cp с по этому параметру.
, характеризующего величину нормального усилия в пятне контакта этого движителя с опорной поверхностью, к базовому сигналу у3cp с по этому параметру.
Для получения разностного сигнала Δуi2 по параметру, характеризующему частоту вращения i-го активного движителя, используют следующее соотношение:

Из формулы (3) видно, что базовый сигнал у2cp, характеризующий среднее значение частот вращения всех активных движителей транспортного средства, при вычислении разностного сигнала сравнения по этому параметру для i-го движителя корректируется в зависимости от усредненного сигнала  , характеризующего величину угла поворота рулевого колеса, по функциональной зависимости. Эта зависимость для каждого активного движителя имеет свой вид, зависящий от положения этого движителя по отношению к полюсу поворота машины. При прямолинейном движении, когда
, характеризующего величину угла поворота рулевого колеса, по функциональной зависимости. Эта зависимость для каждого активного движителя имеет свой вид, зависящий от положения этого движителя по отношению к полюсу поворота машины. При прямолинейном движении, когда  , эта функциональная зависимость для всех активных движителей принимает значение ψi(0)=1.
, эта функциональная зависимость для всех активных движителей принимает значение ψi(0)=1.
На основании полученных разностных сигналов сравнения Δуi1 и Δуi2 (фиг.4) в СААУ, учитывая усредненные сигналы, характеризующие значение частоты вращения  вала двигателя транспортного средства и положение педали акселератора
вала двигателя транспортного средства и положение педали акселератора  , соответствующее желанию водителя изменить продольную скорость движения, формируют сигналы управления (ui1, …, uij) (фиг.1) передаточными отношениями приводов активных движителей транспортного средства (здесь j характеризует количество исполнительных органов изменения передаточного отношения в каждом приводе). Полученные таким образом сигналы управления подают на исполнительные органы изменения величин передаточных отношений приводов движителей с интервалом, соответствующим принятому операционному промежутку времени Δt, причем последний устанавливают, исходя из условий обеспечения требуемого быстродействия и устойчивости системы управления.
, соответствующее желанию водителя изменить продольную скорость движения, формируют сигналы управления (ui1, …, uij) (фиг.1) передаточными отношениями приводов активных движителей транспортного средства (здесь j характеризует количество исполнительных органов изменения передаточного отношения в каждом приводе). Полученные таким образом сигналы управления подают на исполнительные органы изменения величин передаточных отношений приводов движителей с интервалом, соответствующим принятому операционному промежутку времени Δt, причем последний устанавливают, исходя из условий обеспечения требуемого быстродействия и устойчивости системы управления.
Формирование сигналов управления при необходимости осуществляют с их коррекцией по предварительно вычисленным приращениям их значений за предшествующий упомянутый операционный промежуток времени.
Для уменьшения динамических нагрузок в трансмиссии при работе системы управления величины сигналов управления, подаваемых на исполнительные органы изменения передаточных отношений, могут быть ограничены по их максимальному значению.
В частных вариантах реализации изобретения сигналы управления подают:
- в трансмиссии с гидрообъемными приводами - на входы устройств изменения рабочих объемов основного насоса и/или гидромотора;
- в трансмиссии с электроприводами - на вход пульта управления электродвигателем, формирующего ток фазы.
Эффективность предлагаемого способа управления была проверена на математической модели движения трехосного полноприводного автомобиля с гидрообъемной трансмиссией (ГОТ), адекватность которой доказана в результате испытаний автомобиля «Гидроход-49061», проведенных на дмитровском Центральном автомобильном полигоне.
На фиг.5 приведены графики, полученные в результате математического моделирования, характеризующие работу СААУ, реализующую предлагаемый способ. При этом моделировалось прямолинейное движение названного автомобиля, в трансмиссии которого до начала работы СААУ (время от 0 до 1 секунды) имело место рассогласование, получившееся из-за того, что в гидроприводе передней оси параметр регулирования рабочего объема насоса eн1=0,93, тогда как в двух других гидроприводах eн2=eн3=0,9, притом, что для гидромоторов ведущих колес всех осей величина ем=1 (график на фиг.5,б). Из графика на фиг.5,а видно, что при этом необходимый для движения автомобиля момент обеспечивают ведущие колеса переднего моста, а колеса двух других мостов работают в тормозном режиме. Это означает, что при этом в трансмиссии автомобиля имеет место циркуляция мощности.
Также видно, что через 2 секунды после включения СААУ, работающей по предложенному способу, моменты, реализуемые на ведущих колесах всех осей автомобиля, стали практически одинаковыми. То есть в результате проведенной коррекции передаточных отношений приводов ведущих колес автомобиля (см. характер изменения параметров регулирования рабочих объемов насосов и гидромоторов ГОТ на фиг.5,б), циркуляция мощности в его трансмиссии ликвидирована. Следует отметить, что при математическом моделировании в СААУ кроме функций, заявляемых в данном способе регулирования, обеспечивалось поддержание заданной продольной скорости движения автомобиля с целью более корректного сравнения энергетических показателей его движения при работающей СААУ и без нее. Из графика на фиг.5,б видно, что при работе СААУ установленный операционный промежуток времени составлял Δt=0,1 сек. Через этот интервал на устройства изменения передаточного отношения ГОТ поступали приращения по величине сигналов управления. Кроме этого, на величину сигнала управления при моделировании накладывалось ограничение по его максимальной величине для уменьшения динамических нагрузок в трансмиссии при работе СААУ.
В результате установлено, что мощность, потребляемая трансмиссией от двигателя на движение автомобиля в моделируемых условиях, уменьшилась с 29,1 до 27,2 кВт. Снижение составило около 2 кВт или примерно на 7%. Условия движения автомобиля при этом не изменялись, на основании чего сделан вывод, что полученный выигрыш достигнут за счет уменьшения потерь в трансмиссии.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ МНОГОПРИВОДНОГО КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2398149C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГОПРИВОДНОГО КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2397088C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2088429C1 |
| Способ испытаний колесных транспортных средств и динамометрический прицеп для его осуществления | 1987 |
|
SU1504539A1 |
| Объемный гидропривод активного полуприцепа автопоезда | 1981 |
|
SU1047739A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТЯГОВЫХ И ТРАНСПОРТНЫХ МАШИН | 2003 |
|
RU2284926C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2267762C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2009 |
|
RU2424926C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДИНАМИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА ВСПОМОГАТЕЛЬНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2297337C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСА ХОДА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПО ВЕЛИЧИНЕ ЧАСОВОГО РАСХОДА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2267643C1 |



Изобретение относится к области транспортного машиностроения и предназначено для автоматического адаптивного управления бесступенчатыми приводами трансмиссий многоприводных транспортных средств. Способ заключается в том, что измеряют параметры, определяющие момент, реализуемый на активных движителях, частоту их вращения, нормальное усилие в пятне их контакта с опорной поверхностью. За базовые сигналы принимают средние для трансмиссии в целом сигналы, вычисляемые из усредненных за установленный операционный промежуток времени сигналов. Сигналы соответствуют значениям одноименного измеренного параметра на каждом активном движителе. Разностные сигналы сравнения по моментам получают путем сопоставления усредненных сигналов с базовым сигналом по моменту с учетом усредненного сигнала, характеризующего нормальное усилие в пятне контакта конкретного движителя с опорной поверхностью, и базового сигнала по этому параметру для трансмиссии в целом. Разностные сигналы сравнения по частоте вращения каждого активного движителя получают путем сопоставления усредненных сигналов с базовым сигналом по этому параметру с учетом сигнала, характеризующего угол поворота рулевого колеса, усредненного за тот же период времени. Сигналы управления формируют по задаваемому функциональному соотношению полученных разностных сигналов сравнения и сигналов, характеризующих отслеживаемые параметры. Технический результат заключается в повышении эффективности многоприводного транспортного средства. 7 з.п. ф-лы, 5 ил.
1. Способ автоматического адаптивного управления бесступенчатой трансмиссией многоприводного транспортного средства, содержащей, как минимум, два привода активных движителей с независимым управлением, путем изменения передаточных отношений в зависимости от отслеживаемых текущих величин параметров, указывающих на необходимость изменения режима работы трансмиссии, в частности, частоты вращения вала двигателя транспортного средства, угла поворота рулевого колеса и положения педали акселератора, заключающийся в подаче на соответствующие исполнительные органы трансмиссии необходимых сигналов управления, которые формируют на основании разностных сигналов сравнения, получаемых путем измерения параметров, характеризующих текущий режим работы каждого привода, преобразования полученных результатов измерений в соответствующие сигналы и последующего сопоставления этих сигналов с базовыми сигналами, отличающийся тем, что в нем измеряют параметры, определяющие момент, реализуемый на активных движителях, частоту их вращения, а также нормальное усилие в пятне их контакта с опорной поверхностью, за базовые сигналы, устанавливаемые отдельно по каждому из этих параметров, принимают средние для трансмиссии в целом сигналы, вычисляемые из усредненных за установленный операционный промежуток времени сигналов, соответствующих значениям одноименного измеренного параметра на каждом активном движителе, разностные сигналы сравнения по моментам, реализуемым на каждом активном движителе, получают путем сопоставления соответствующих усредненных сигналов с базовым сигналом по моменту с учетом усредненного сигнала, характеризующего нормальное усилие в пятне контакта конкретного движителя с опорной поверхностью, и базового сигнала по этому параметру для трансмиссии в целом, а разностные сигналы сравнения по частоте вращения каждого активного движителя получают путем сопоставления соответствующих усредненных сигналов с базовым сигналом по этому параметру с учетом сигнала, характеризующего угол поворота рулевого колеса, усредненного за тот же период времени, при этом сигналы управления формируют по задаваемому в зависимости от типа соответствующего привода движителя функциональному соотношению полученных разностных сигналов сравнения и сигналов, характеризующих отслеживаемые параметры, указывающие на необходимость изменения режима работы трансмиссии, также предварительно усредненных за тот же операционный промежуток времени, и подают сигналы управления на исполнительные органы изменения величин передаточных отношений приводов с периодичностью, соответствующей упомянутому операционному промежутку времени, причем последний устанавливают, исходя из условий обеспечения требуемого быстродействия и устойчивости системы управления.
2. Способ по п.1, отличающийся тем, что при формировании сигналов управления осуществляют их коррекцию по предварительно вычисленным приращениям их значений за предшествующий упомянутый операционный промежуток времени.
3. Способ по п.1, отличающийся тем, что на величину сигналов управления, поступающих на исполнительные органы изменения величин передаточных отношений приводов, накладывается ограничение по максимальной величине для уменьшения динамических нагрузок в трансмиссии при работе системы управления.
4. Способ по п.1, отличающийся тем, что в качестве параметра, определяющего нормальное усилие в пятне контакта ведущего колеса с опорной поверхностью, измеряют величину деформации упругого элемента подвески этого колеса.
5. Способ по п.1, отличающийся тем, что разностный сигнал сравнения Δуi1 по величине момента, реализуемого на i-м активном движителе, вычисляют по формуле

где  - усредненный сигнал, характеризующий момент, реализуемый на i-м активном движителе;
- усредненный сигнал, характеризующий момент, реализуемый на i-м активном движителе;
у1ср - базовый сигнал, характеризующий среднее значение моментов, реализуемых на активных движителях транспортного средства;
 - усредненный сигнал, характеризующий величину нормального усилия в пятне контакта i-го активного движителя с опорной поверхностью;
- усредненный сигнал, характеризующий величину нормального усилия в пятне контакта i-го активного движителя с опорной поверхностью;
у3ср - базовый сигнал, характеризующий среднее значение нормальных усилий в пятне контакта всех активных движителей транспортного средства с опорной поверхностью.
6. Способ по п.1, отличающийся тем, что разностный сигнал сравнения Δуi2 по величине частоты вращения i-го активного движителя вычисляют по формуле

где  - усредненный сигнал, характеризующий частоту вращения i-го активного движителя;
- усредненный сигнал, характеризующий частоту вращения i-го активного движителя;
у2ср - базовый сигнал, характеризующий среднее значение частот вращения активных движителей транспортного средства;
 - усредненный сигнал, характеризующий величину угла поворота рулевого колеса;
- усредненный сигнал, характеризующий величину угла поворота рулевого колеса;
 - функциональная зависимость, характеризующая необходимое отклонение требуемой частоты вращения активного движителя от принятого базового значения при движении транспортного средства по криволинейной траектории.
- функциональная зависимость, характеризующая необходимое отклонение требуемой частоты вращения активного движителя от принятого базового значения при движении транспортного средства по криволинейной траектории.
7. Способ по п.1, отличающийся тем, что для трансмиссии с гидрообъемными приводами в качестве параметра, определяющего момент, реализуемый на активном движителе, измеряют давление, создаваемое основным насосом, а сигналы управления подают на входы устройств изменения рабочих объемов основного насоса и/или гидромотора.
8. Способ по п.1, отличающийся тем, что для трансмиссии с электроприводами, например, на основе трехфазного асинхронного тягового электродвигателя с короткозамкнутым ротором, в качестве параметра, определяющего момент, реализуемый на активном движителе, измеряют ток фазы, а сигналы управления подают на вход пульта управления электродвигателем, формирующего этот ток фазы.
| СПОСОБ АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТЯГОВЫХ И ТРАНСПОРТНЫХ МАШИН | 2003 |
|
RU2284926C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЛНОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2000 |
|
RU2187436C2 |
| JP 2006166572 А, 22.06.2006 | |||
| JP 7322417 А, 08.12.1995. | |||

