Изобретение относится к машиностроению и может быть использовано для гашения колебаний транспортных и других мобильных машин, например строительнодорожных, преимущественно на пневмоколесном ходу.
Известен гидравлический или пневматический тормозной привод колесной строительно-дорожной машины или ее базового колесного тягача. Колесные тормоза с таким приводом работают при нажатии на педаль тормоза машинистом-водителем и предназначены для гашения скорости поступательного движения машины и ее остановки. Как правило, некоторые операции рабочего процесса строительно-дорожной машины осуществляю Т на пониженных скоростях, часто с включением ходоуменьшителей, и машинист при их выполнении практически не использует колесные тормоза.
Для гашения вертикальных колебаний транспортных и других мобильных машин в их подвески вводят рессоры, амортизаторы, демпферы сухого или вязкого трения. В силу специфики рабочего процесса некоторых строительно-дорожных машин, например бульдозера, в их подвеске или в подвеске базового тягача рессоры и амортизаторы блокируются.
В рабочем процессе при разработке и перемещении грунта отвалом в целях максимальной реализации тяговых качеств бульдозер многократно выводят на режим буксования движителей, который, в свою очередь, часто сопровождается связанными колебаниями машины, развивающимися очень быстро во времени и практически неконтролируемыми машинистом.
Поведение колебательной системы машины в режиме связанных колебаний определяют три функционально связанных (взаимозависимых) дифференциальнь1х уравнения, отражающих следующие движения:
малые колебания машины по координатеХ(а);
вращательные колебания машины в плоскости, перпендикулярной опорной поверхности и проходящей через продольную ось симметрии машины, по координате
(б);
крутильные колебания в трансмиссии
(в).Движения а, б отражают внешнюю динамику машинь, движение в - внутреннюю. Малые движения по координате X в обе стороны имеют автоколебательную природу происхождения.
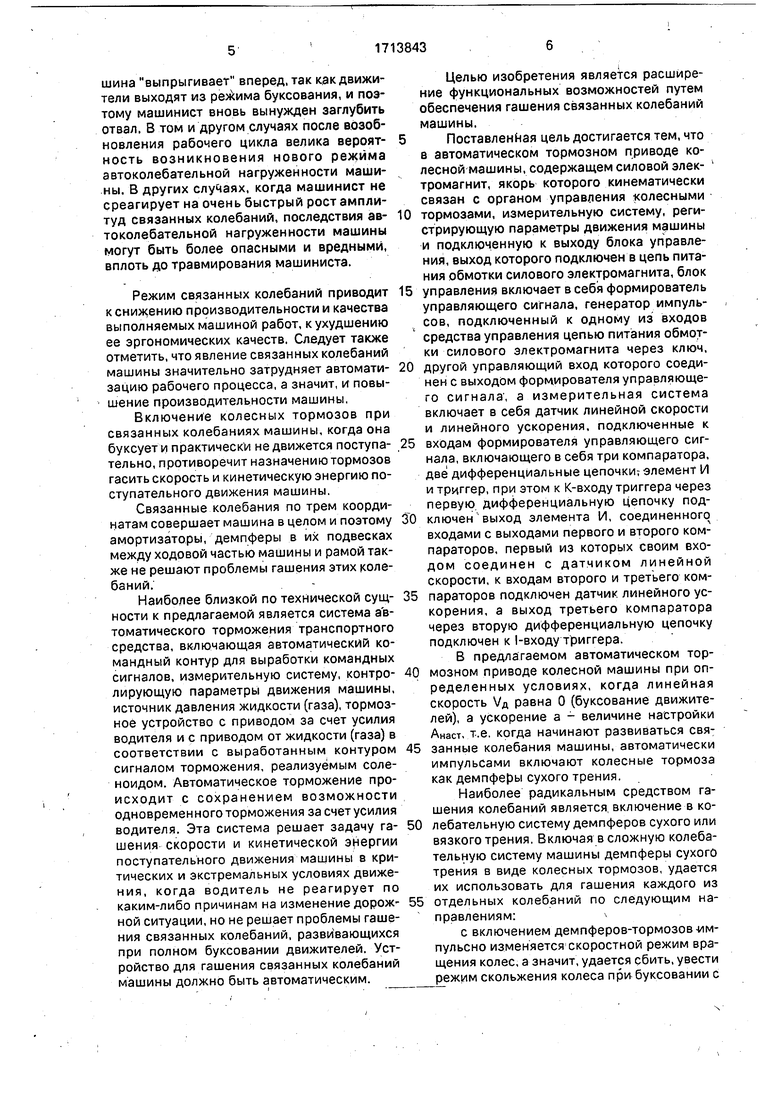
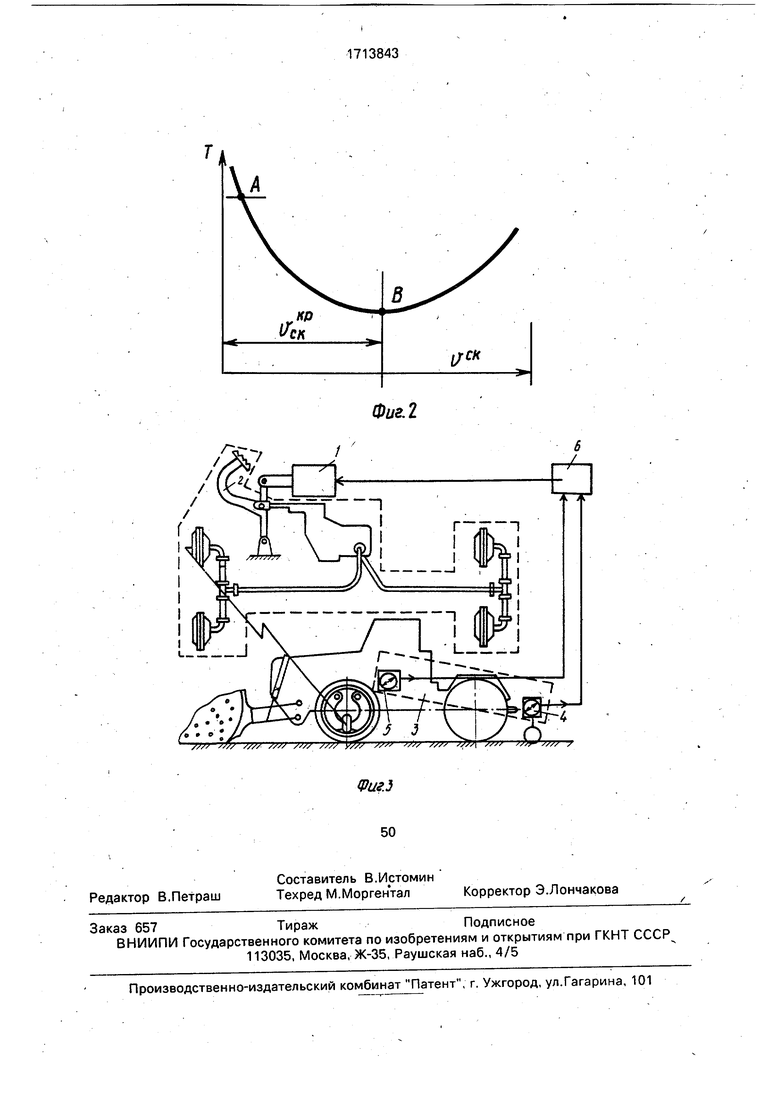
Известно, что причиной автоколебаний является наличие падающего участка (отрицательное сопротивление)в характеристике трения скольжения в паре трения, в данном случае в паре колесо - опорная поверхность.
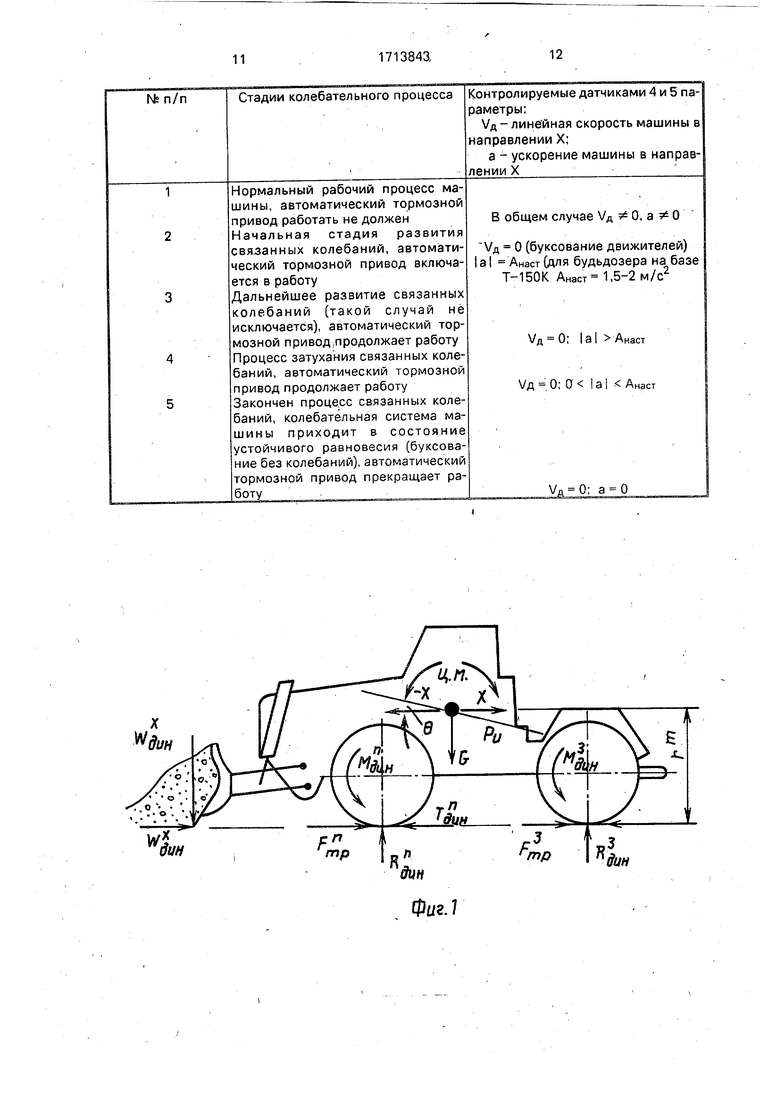
Именно в условиях такого переменного трения работают колеса машины при полном буксовании (скольжении) на опорной поверхности, когда действительная скоро сть самой машины Уд 0. Знакопеременные инерционные силы Ри (см. фиг. 1) в центре масс, зависящие от ускорения машины в направлении X, действуя на плече Гт, провоцируют угловые колебания ее по координате. Очевидной становится динамика нагрузок на колеса и узлы ходовой части от угловых колебаний по координате 0(Кдин), амплитуды которых очень быстро растут. Но эти угловые движения по координате в, в свою очередь, через Вдин влияют на динамику силы тяги на колесах (Тдин РдинУ, где Вдин динамическая реакция на колесах; Y коэффициент сцепления) и на динамику крутящего момента в трансмиссии (Мдин Тдиих хгк, где Гк - радиус колеса). С ростом Тдин возрастают и ускорения машины по координате X, а значит, возрастают и Ри.
Все динамические нагрузки при связанных колебаниях обуславливают рост одна другой или несколькими одновременно. Динамические нагрузки в трансмиссии и на ходовую часть машины при этих колебаниях ограничиваются в основном только мощностью двигателя и видом его механической характеристики. И чем более энергонасыщена машина, тем больше амплитуда связанных колебаний и больше по величине динамические нагрузки в ее узлах. Например, экспериментально установлено, что на бульдозере на базе трактора Т-150К динамические нагрузки в трансмиссии и на ходовую часть в режиме связанных колебаний в .2,2-2,5 аза превышают по величине те же нагрузки при других самых неблагоприятных видах нагружения. Под воздействием инерционных.сил машинист сильно подбрасывается в кабине несмотря на совершенную амортизацию сидения, в результате чего он теряет контроль за управлением машины и ее рабочим оборудованием. В такой ситуации в наилучших случаях машинист успевает или включить муфту сцепления или выглубить отвал. В первом случае при выключении муфты сцепления и прекращении колебаний машины для возобновления рабочего цикла машинист должен выполнить задний ход машины, выглубить отвал и после этого продолжить прерванный рабочий цикл. Во втором случае при выглублении отвала независимо от воли машиниста машина выпрыгивает вперед, так к,ак движители выходят из буксования, и поэтому машинист вновь вынужден заглубить отвал, В том и другом случаях после возобновления рабочего цикла велика вероятность возникновения нового режима автоколебательной нагруженности машины. В других случаях, когда машинист не среагирует на очень быстрый рост амплитуд связанных колебаний, последствия автоколебательной нагруженности машины могут быть более опасными и вредными, вплоть до травмирования машиниста.
Режим связанных колебаний приводит к снижению производительности и качества выполняемых машиной работ, к ухудшению ее эргономических качеств. Следует также отметить, что явление связанных колебаний машины значительно затрудняет автоматизацию рабочего процесса, а значит, и повышение производительности машины,
Включени е колесных тормозов при связанных колебаниях машины, когда она буксует и практически не движется поступательно, противоречит назначению тормозов гасить скорость и кинетическую энергию поступательного движения машины.
Связанные колебания по трем координатам совершает машина в целом и поэтому амортизаторы, демпферы в их подвесках между ходовой частью машины и рамой также не решают проблемы гашения этих колебаний.
Наиболее близкой по технической сущности к предлагаемой является система автоматического торможения транспортного средства, включающая автоматический командный контур для выработки командных сигналов, измерительную систему, контролирующую параметры движения машины, источник давления жидкости (газа), тормозное устройство с приводом за счет усилия водителя и с приводом от жидкости (газа) в соответствии с выработанным контуром сигналом торможения, реализуемым соленоидом. Автоматическое торможение происходит с сохранением возможности одновременного торможения за счет усилия водителя. Эта система решает задачу гашения скорости и кинетической энергии поступательного движения машины в критических и экстремальных условиях движения, когда водитель не реагирует по каким-либо причинам на изменение дорожной ситуации, но не решает проблемы гашения связанных колебаний, развивающихся при полном буксовании движителей. Устройство для гашения связанных колебаний машины должно быть автоматическим.
Целью изобретения является расширение функциональных возможностей путем обеспечения гашения связанных колебаний машины,
Поставленная цель достигается тем, что
в автоматическом тормозном приводе колесной машины, содержащем силовой электромагнит, якорь которого кинематически связан с органом управления колесными
0 тормозами, измерительную систему, регистрирующую параметры движения машины и подключенную к выходу блока управления, выход которого подключен в цепь питания обмотки силового электромагнита, блок
5 управления включает в себя формирователь управляющего сигнала, генератор импульсов, подключенный к одному из входов средства управления цепью питания обмотки силового электромагнита через ключ,
0 другой управляющий вход которого соединен с выходом формирователя управляющего сигнала , а измерительная система включает в себя датчик линейной скорости и линейного ускорения, подключенные к
5 входам формирователя управляющего сигнала, включающего в себя три компаратора, две дифференциальные цепочки; элемент И и триггер, при этом к К-входу триггера через первую дифференциальную цепочку подключен выход элемента И, соединенного входами с выходами первого и второго компараторов, первый из которых своим входом соединен с датчиком линейной скорости, к входам второго и третьего компараторов подключен датчик линейного ускорения, а выход третьего компаратора через вторую дифференциальную цепочку подключен к 1-входу триггера.
В предлагаемом автоматическом тормозном приводе колесной машины при определенных условиях, когда линейная скорость Уд равна О (буксование движителей), а ускорение а - величине настройки Анаст, т.е. когда начинают развиваться связанные колебания машины, автоматически импульсами включают колесные тормоза как демпферы сухого трения.
Наиболее радикальным средством гашения колебаний является, включение в колебательную систему демпферов сухого или вязкого трения. Включая в сложную колебательную систему машины демпферы сухого трения в виде колесных тормозов, удается их использовать для гашения каждого из
5 отдельных колебаний по следующим направлениям:
с включением демпферов-тормозов-импульсно изменяется скоростной режим вращения колес, а значит, удается сбить, увести режим скольжения колеса при буксовании с
падающего участка характеристики трения, благоприятного режима для автоколебаний машины по координате X;
при замыкании трансмиссии через демпферы-тормоза на корпус машины происходит рассеяние, диссипация энергии колебаний в трансмиссии, снижается Мдин, а значит, снижается и величина Тдин на колесах, а затем и Ри;
демпферы-тормоза вносят свой вклад и в диссипацию энергии колебаний в направлении координаты X, снижают величину Ри, а значит, снижают и амплитуду колебаний по в
включая демпферы-тормоза, увеличивают загрузку двигателя, режим работы которого определяется новым участком (более пологим) егомеханической характеристики, когда автоколебания и в целом связанные колеба.ния машины развиваться не могут.
Аналогично взаимосвязи роста всех динамических нагрузок при связанных колебаниях с помощью демпферов-тормозов можно добиться такого же взаимосвязанного снижения (гашения) этих же нагрузок. Воздействие демпф еров-тормозов на колебательную систему машинь - импульсное с частотой, большей собственной частоты истемы.
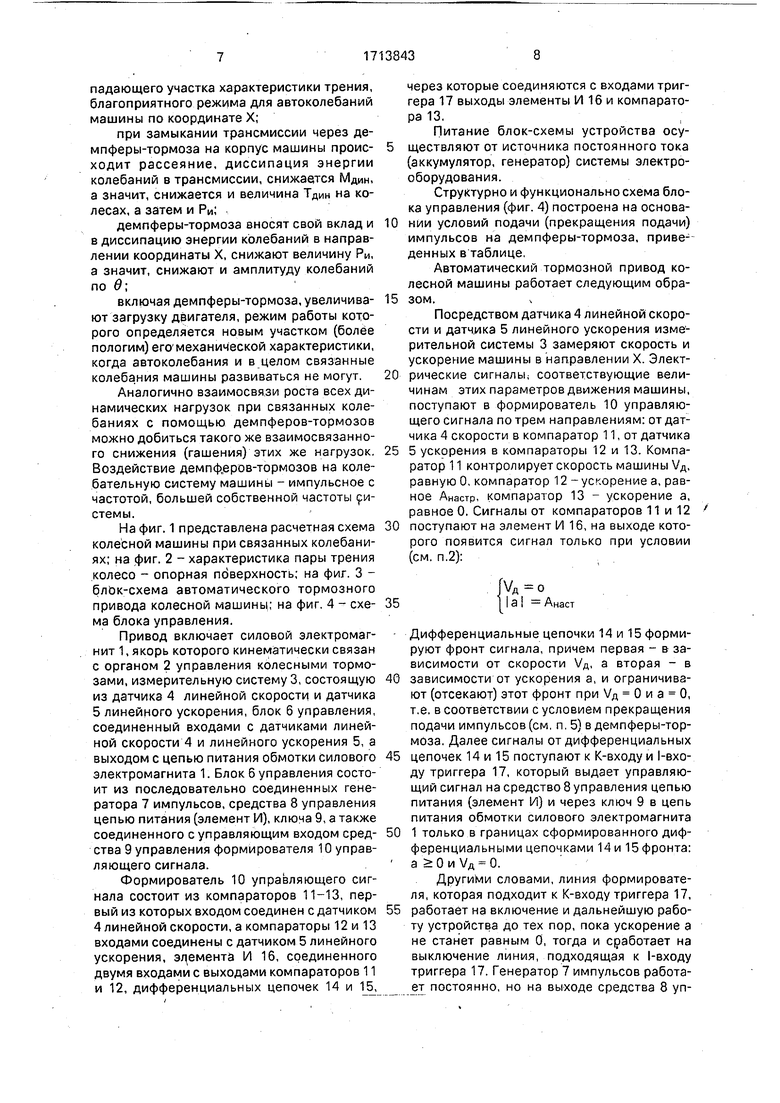
На фиг. 1 представлена расчетная схема колесной машины при связанных колебаниях; на фиг. 2 - характеристика пары трения колесо - опорная поверхность; на фиг. 3 блЬк-схема автоматического тормозного привода колесной машинц; на фиг. 4 - схема блока управления.
Привод включает силовой электромагнит 1, якорь которого кинематически связан с органом 2 управления колесными тормозами, измерительную систему 3, состоящую из датчика 4 линейной скорости и датчика 5 линейного ускорения, блок 6 управления, соединенный входами с датчиками линейной скорости 4 и линейного ускорения 5, а выходом с цепью питания обмотки силового электромагнита 1. Блок 6 управления состоит из последовательно соединенных генератора 7 импульсов, средства 8 управления цепью питания (элемент И), ключа 9, а также соединенного с управляющим входом средства 9 управления формирователя 10 управляющего сигнала.
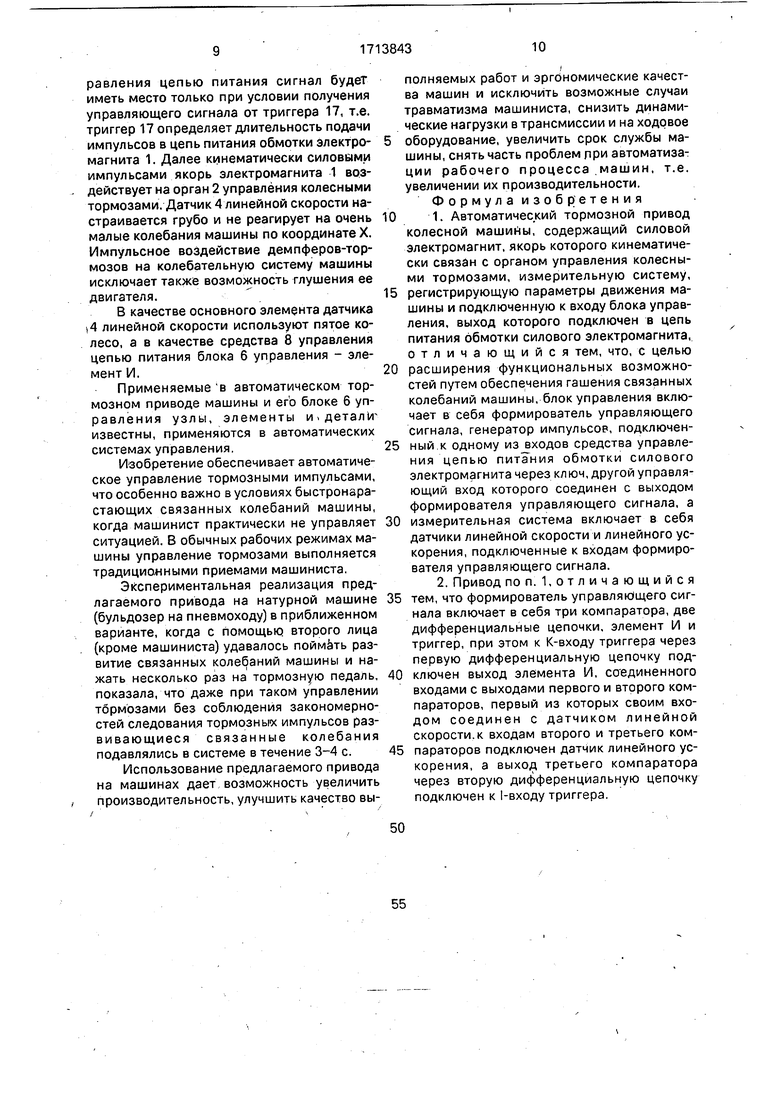
Формирователь 10 управляющего сигнала состоит из компараторов 11-13, первый из которых входом соединен с датчиком 4 линейной скорости, а компараторы 12 и 13 входами соединены с датчиком 5 линейного ускорения, элемента И 16, соединенного двумя входами с выходами компараторов 11 и 12, дифференциальных цепочек 14 и 15,
через которые соединяются с входами триггера 17 выходы элементы И 16 и компаратора 13.
Питание блок-схемы устройства осуществляют от источника постоянного тока (аккумулятор, генератор) системы электрооборудования.
Структурно и функционально схема блока управления (фиг. 4) построена на основаНИИ условий подачи (прекращения подачи) импульсов на демпферы-тормоза, приве-денных в таблице,
Автоматический тормозной привод колесной машины работает следующим образом.
Посредством датчика 4 линейной скорости и датчика 5 линейного ускорения измерительной системы 3 замеряют скорость и ускорение машины в направлении X. Электрические сигналь соответствующие величинам этих параметров движения машины, поступают в формирователь 10 управляющего сигнала потрем направлениям: отдатчика 4 скорости в компаратор 11, от датчика
5 ускорения в компараторы 12 и 13. Компаратор 11 контролирует скорость машины Уд, равную О, компаратор 12 - усг.орение а, равное Анастр, компаратор 13 - ускорение а, равное 0. Сигналы от компараторов 11 и 12
поступают на элемент И 16, на выходе которого появится сигнал только при условии (см. п.2):
а| Анаст
Дифференциальные цепочки 14 и 15 формируют фронт сигнала, причем первая - в зависимости от скорости Vfl, а вторая - в
зависимости от ускорения а, и ограничивают (отсекают) этот фронт при Уд О и а О, т.е. в соответствии с условием прекращения подачи импульсов (см, п, 5) в демпферы-тормоза. Далее сигналы от дифференциальных
цепочек 14 и 15 поступают к К-входу и 1-еходу триггера 17, который выдает управляющий сигнал на средство 8 управления цепью питания (элемент И) и через ключ 9 в цепь питания обмотки силового электромагнита
1 только в границах сформированного дифференциальными цепочками 14 и 15 фронта:
а О и Уд 0.
Другими словами, линия формирователя, которая подходит к К-входу триггера 17,
работает на включение и дальнейшую работу устройства до тех пор, пока ускорение а не станет равным О, тогда и сработает на выключение линия, подходящая к 1-входу триггера 17. Генератор 7 импульсов работает постоянно, но на выходе средства 8 управления цепью питания сигнал будет иметь место только при условии получения управляющего сигнала от триггера 17, т.е. триггер 17 определяет длительность подачи импульсов в цепь питания обмотки электромагнита 1. Далее кинематически силовыми импульсами якорь электромагнита 1 воздействует на орган 2 управления колесными тормозами. Датчик 4 линейной скорости настраивается грубо и не реагирует на очень малые колебания машины по координате X. Импульсное воздействие демпферов-тормозов на колебательную систему машины исключает также возможность глушения ее двигателя.
В качестве основного элемента датчика А линейной скорости используют пятое колесо, а в качестве средства 8 управления цепью питания блока 6 управления - элемент И.
Применяемые в автоматическом тормозном приводе машины и его блоке 6 управления узлы, элементы и деталИ известны, применяются в автоматических системах управления.
Изобретение обеспечивает автоматическое управление тормозными импульсами, что особенно важно в условиях быстронарастающих связанных колебаний машины, когда машинист практически не управляет ситуацией. В обычных рабочих режимах машины управление тормозами выполняется традиционными приемами машиниста.
Э|«спериментальная реализация предлагаемого привода на натурной машине (бульдозер на пневмоходу) в приближенном варианте, когда с помощью второго лица (кроме машиниста) удавалось поиметь развитие связанных колебаний машины и нажать несколько раз на тормозную педаль, показала, что даже при таком управлении тормозами без соблюдения закономерностей следования тормозных импульсов развивающиеся связанные колебания подавлялись в системе в течение 3-4 с.
Использование предлагаемого привода на машинах дает, возможность увеличить производительность, улучшить качество выполняемых работ и эргономические качества машин и исключить возможные случаи травматизма машиниста, снизить динамические нагрузки в трансмиссии и на ходовое
оборудование, увеличить срок службы машины, снять часть проблем при автоматизации рабочего процесса .машин, т.е, увеличении их производительности. Формулаизобретения
1. Автоматический тормозной привод колесной машийы, содержащий силовой электромагнит, якорь которого кинематически связан с органом управления колесными тормозами, измерительную систему,
регистрирующую параметры движения машины и подключенную к входу блока управления, выход которого подключен в цепь питания обмотки силового электромагнита, отличающийся тем, что, с целью
расширения функциональных возможностей путем обеспечения гашения связанных колебаний машины, блок управления включает в себя формирователь управляющего сигнала, генератор импульсов, подключенный.к одному из входов средства управления цепью питания обмотки силового электромагнита через ключ, другой управляющий вход которого соединен с выходом формирователя управляющего сигнала, а
измерительная система включает в себя датчики линейной скорости и линейного ускорения, подключенные к входам формирователя управляющего сигнала.
2. Привод по п. 1,отличающийся
тем, что формирователь управляющего сигнала включает в себя три компаратора, две дифференциальные цепочки, элемент И и триггер, при этом к К-входу триггера через первую дифференциальную цепочку подключен выход элемента И, соединенного входами с выходами первого и второго компараторов, первый из которых своим входом соединен с датчиком линейной скорости, к входам второго и третьего компараторов подключен датчик линейного ускорения, а выход третьего компаратора через вторую дифференциальную цепочку подключен к 1-входу триггера.
№п/п
Стадии колебательного процесса
Нормальный рабочий процесс машины, автоматический тормозной привод работать не должен Начальная стадия развития связанных колебаний, автоматический тормозной привод включается в работу
Дальнейшее развитие связанных колебаний (такой случай не исключается), автоматический тормозной привод;продолжает работу Процесс затухания связанных колебаний, автоматический тормозной привод продолжает работу Закончен процесс связанных колебаний, колебательная система машины приходит в состояние устойчивого равновесия (буксование без колебаний), автоматический тормозной привод прекращает работу
Контролируемые датчиками 4 и 5 параметры:
Vfl-линейная скорость машины в направлении X;
а - ускорение машины в направлении X
В общем случае Уд 9 О, а О
Vfl О (буксование движителей)
1а| АнастСдля будьдозера на базе
Т-150К Анаст 1,5-2м/С
VA O; lal Анаст
Уд 0; 0 lal Анаст
Уд-О: а 0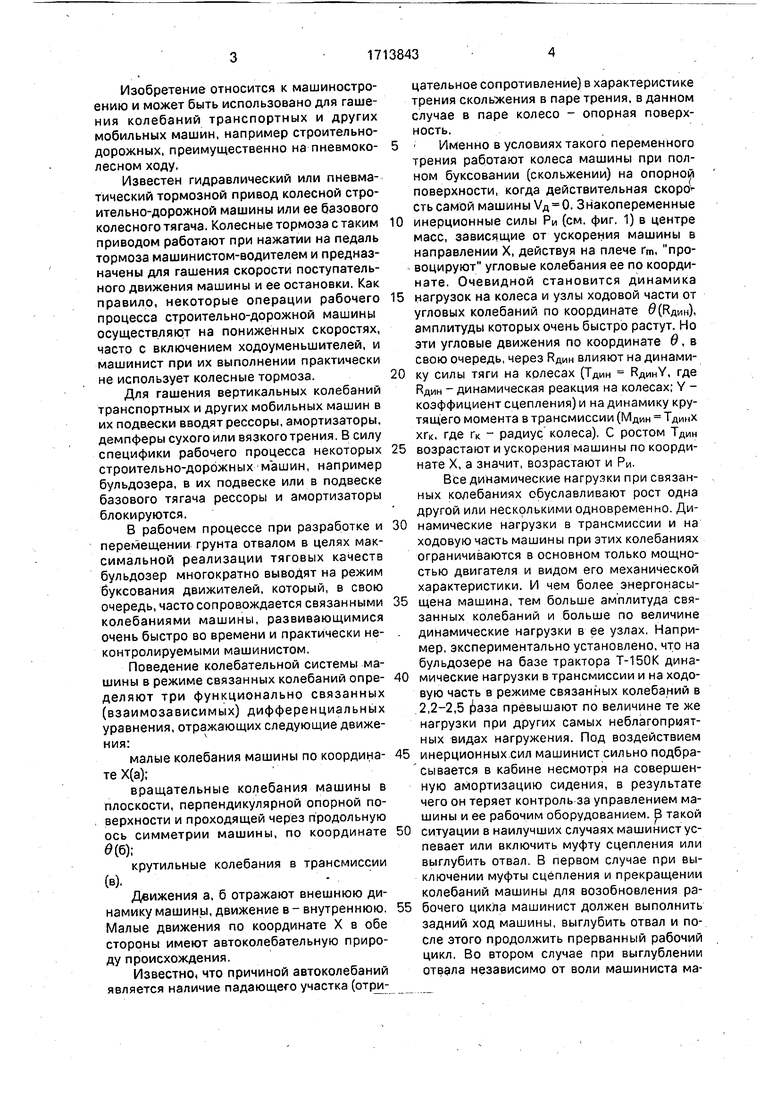
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ ВАГОНА С РЕЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2284928C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
| Устройство измерения скорости для системы управления тормозами колесного транспортного средства | 1970 |
|
SU568349A3 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЛАВНОСТИ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ГУСЕНИЧНЫХ И КОЛЕСНЫХ МАШИН | 2005 |
|
RU2285847C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЛНОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2000 |
|
RU2187436C2 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
Изобретение относится к транспортному машиностроению. Цель изобретения расширение функциональных возможностей путем обеспечения гашения связанных колебаний машины. Для достижения этого в автоматический тормозной привод введены силовой электромагнит 1, якорь которого/юкинематически связа'н с органом 2 управления колесными тормозами, измерительная система 3 в виде датчика 4 линейной скорости и датчика 5 линейного ускорения и блок 6 управления, выход которого подключен в цепь питания обмотки электромагнита 1. Блок 6 включает в себя последовательно соединенные генератор 7 импульсов,.средство управления цепью 8 питания обмотки электромагнита 1 и ключ 9, а также подключенный к второму входу средства управления цепью 8 питания формирователь 10 управляющего сигнала, состоящий из компараторов, дифференциальных цепочек, элемента И и триггера. С помощью и;змери- тельной системы устанавливают скорость и ускорение поступательного движения машины и, когда скорость станет равной нулю (буксование), а ускорение достигнет величи- .ны настройки, автоматически импульсами включаются колесные тормоза-демпферы с частотой, превышающей частоту собственных колебаний машины. 1 з.п. ф-лы, 4 ил., 1 табл.^/500 00J^со1г=ВФие4
L
ФигЛ
Фиг. 2
| Справочник, по тракторам Т-150 и Т- 150К./ПОД ред | |||
| проф | |||
| Б.П.Кашубы, изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и дополн | |||
| Харьков: Прапор, 1975, с | |||
| Вагонетка для кабельной висячей дороги, переносной радиально вокруг центральной опоры | 1920 |
|
SU243A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
