Автопоезд - это поезд, предназначенный для движения по автомобильным дорогам, состоящий из двух или более вагонов, сцепленных поочередно с автомобильными тягачами. Первый тягач называется головным, остальные - последующими (идущими по следу). При движении последующие тягачи двигаются по колее головного тягача. Автопоезд может применяться для транспортировки пассажиров и грузов по автомобильным дорогам.
В настоящее время автопоездом называется тягач с прицепом(ами). Имеются автопоезда с управляемой вручную задней частью полуприцепа. Основными недостатками таких автопоездов являются их плохая маневренность, так как с увеличением длины поезда увеличивается его радиус поворота, полоса поворота и плохая проходимость, поскольку тягачу приходится везти за собой длинный, пассивный хвост. Для транспортировки такого автопоезда, даже состоящего всего из одного прицепа, на большое расстояние потребуется 3-4 водителя, что удорожает перевозку.
Автопоезд замыслен как поезд, состоящий из нескольких вагонов (от двух вагонов до двух-четырех десятков вагонов), соединенных между собой, движущими их тягачами. Основной смысл работы состоит в том, чтобы каждый тягач в самостоятельном движении двигался по колее головного тягача. Тогда поезд будет обладать маневренностью одного тягача. Кроме того, это позволит автономизировать поезда, так как один водитель может вести автопоезд в 30-40 вагонов несколько часов, а бригада из трех-четырех водителей может вести автопоезд столько, на какую длину пути хватит горючего, находящегося в составе поезда. Можно будет создавать поезда, обладающие необходимой, для данного маршрута, высокой проходимостью, так как поезд будут двигать множество тягачей и, если в пути встретится участок, труднопроходимый для одного-двух тягачей, остальные тягачи сначала протолкнут, а потом протащат вагоны по этому участку. При необходимости оператор со своего рабочего места сможет управлять порядком движения состава и каждого вагона в отдельности. В зависимости от проходимости участка оператор может выбрать любое расположение вагонов при движении поезда по этому участку. Такой поезд будет обладать следующими существенными признаками.
1. Он должен состоять из вагонов, оборудованных сцепными площадками.
2. Эти вагоны должны двигать тягачи.
В автопоезде понадобятся тягачи двух типов. В составе должен быть один головной тягач, остальные тягачи - последующие. Головной тягач - это тягач, оборудованный кабиной для водителя и аппаратурой для передачи сигналов действия водителя по ведению состава. У головного тягача должна быть одна сцепная платформа. Каждый из последующих тягачей должны быть оборудованы сцепными платформами, на которые опираются и с которыми сцепляются вагоны. Сцепное устройство должно быть таким, чтобы сцепная площадка вагона имела возможность свободно поворачиваться на сцепной платформе тягача. Вагоны и тягачи должны следовать друг за другом поочередно.
3. Последующие тягачи должны быть снабжены автоматической системой рулевого управления, позволяющей им повторять движения рулевых колес головного тягача в том месте, в котором они были совершены головным тягачом. Кроме того, тягачи, кроме головного, должны иметь систему дистанционного управления: подачей топлива в двигателе, коробкой переключения передач (КПП) и тормозами, чтобы водитель мог совершать все действия по управлению составом со своего рабочего места.
Для создания такого поезда необходимо выбрать оптимальный вариант соединения поезда и далее разработать составные части этого поезда. Вагоны поезда могут иметь различные способы сцепления с тягачами. Рассмотрим из них два наиболее приемлемых.
1 - каждый вагон имеет две свои самодвижущиеся платформы (тягачи) (фиг.1). Эта схема хороша тем, что в ней можно использовать существующие тягачи, доработав их. Тележки полуприцепов сделать поворачивающимися относительно кузова, ввести автоматизированное рулевое управление на тягачи и на тележки полуприцепов. Придется оборудовать сцепными устройствами с двух сторон каждый фургон кроме головного. Головной тягач оборудовать только задним сцепным устройством. При этой схеме возникнут трудности со стандартизацией исполнительного устройства рулевого управления. Тягачей при такой схеме соединения потребуется в два раза больше, чем вагонов. Если символом n обозначить количество вагонов поезда, то количество тягачей будет равно  .
.
2 - тягачи располагаются между двумя вагонами фиг.2. В этом случае последующие тягачи должны иметь две платформы, снабженные сцепными устройствами, автоматическое рулевое управление, дистанционное или автоматическое управления: подачей топлива в двигателе, коробкой переключения передач (КПП) и тормозами. Вагоны должны иметь по два сцепных устройства и приспособления, обеспечивающие стоянку вагона без опоры на платформы тягачей. При такой схеме количество тягачей равно n+1. Схема 2 более универсальна, мобильна, надежна. Но для создания автопоезда по этой схеме потребуется создание новых вагонов и новых тягачей. Это потребует затрат, но быстро окупится. Мы будем разрабатывать эту схему.
Изобретение поясняется чертежами.
Фиг.1. Схема первая автопоезда.
Фиг.2. Схема вторая автопоезда.
Фиг.3. Ведомый тягач.
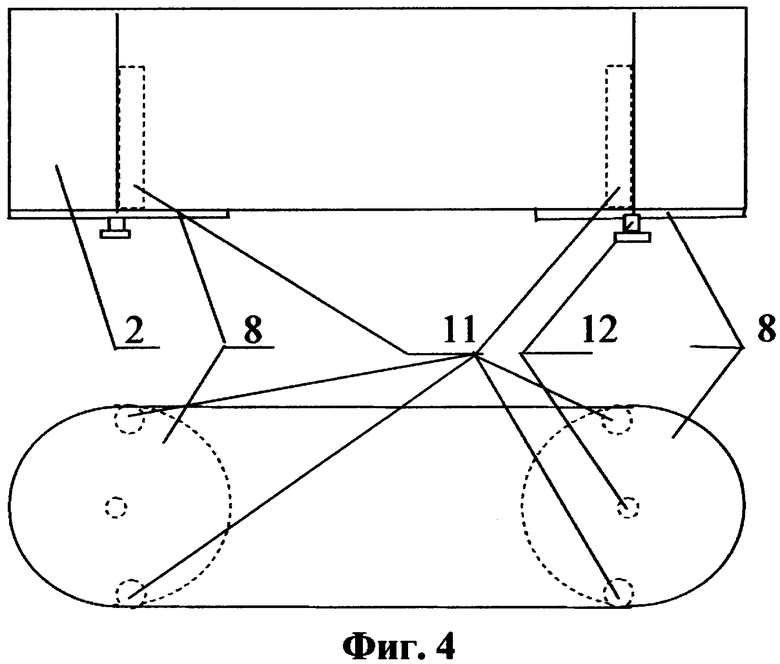
Фиг.4. Вагон.
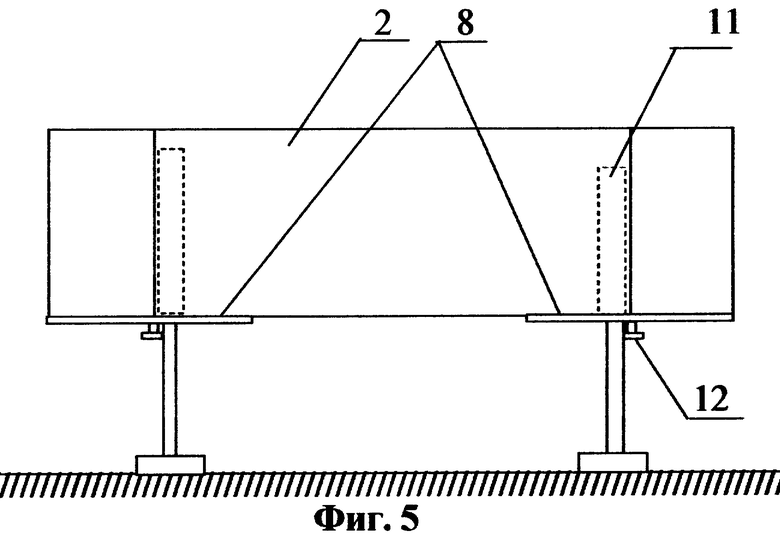
Фиг.5. Стояночное положение вагона.
Фиг.6. Принципиальная схема исполнительного механизма автоматического рулевого управления.
Фиг.7. Принципиальная схема прохождения сигнала автоматического рулевого управления.
Фиг.8. Определение расстояния L.
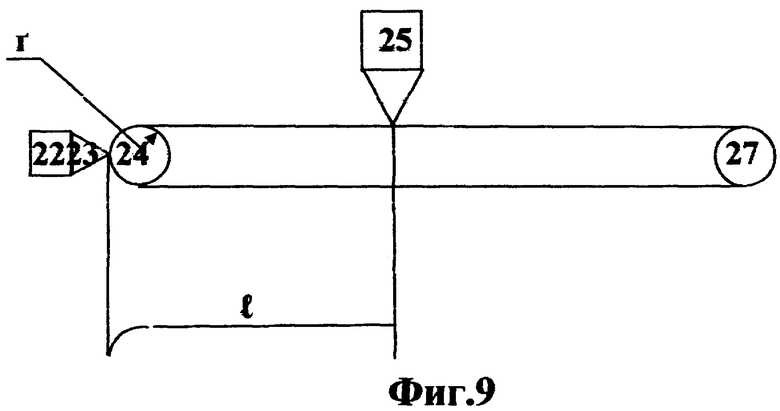
Фиг.9. Определение расстояния l.
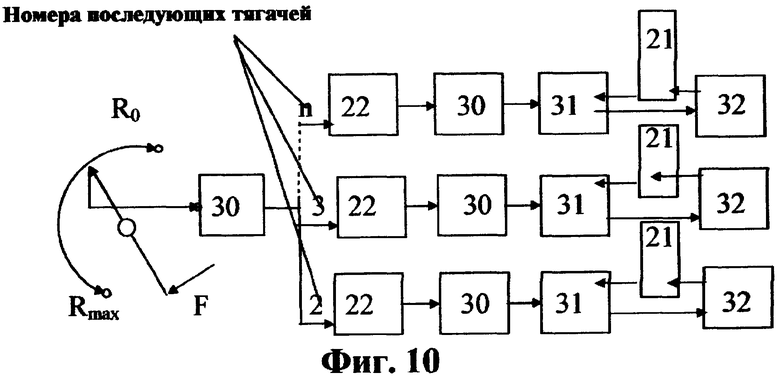
Фиг.10. Принципиальная схема дистанционного управления.
На них обозначены:
1 - головной тягач,
2 - вагон,
3 - последующий тягач,
4 - платформа,
5 - рулевое колесо,
6 - механизм рулевого управления,
7 - ведущее колесо,
8 - сцепная площадка,
9 - двигатель,
10 - кабина последующего тягача,
11 - стояночная опора,
12 - шкворень,
13 - рабочий цилиндр,
14 - ЭК1-ЭК5 - электроклапаны,
15 - СБ сливная емкость,
16 - Л, ПР - левый и правый силовые цилиндры,
17 - обратный клапан,
18 - У - ограничители нижнего положения поршня,
19 - Д - электродвигатель,
20 - К - компрессор,
21 - коммутатор обратной связи,
22 - устройство, принимающее сигнал от головного тягача (приемник),
23 - устройство, записывающее сигнал на переносчик информации, магнитную ленту, например,
24 - ведущий ролик,
25 - устройство, считывающее информацию (счетчик),
26 - магнитная лента,
27 - ведомый ролик,
28 - устройство, стирающее информацию (стерка),
а - панель окоп для установки устройства, считывающего информацию,
29 - коммутатор сигналов головного тягача,
30 - коммутатор сигналов последующего тягача,
31 - исполнительный механизм,
32 - прибор контроля положения исполнительного механизма.
В автопоезде фиг.2 понадобятся тягачи двух типов. В составе должен быть один головной тягач 1, остальные тягачи 3 - последующие. Головной тягач должен иметь нормальную водительскую кабину, в которой, кроме водительского, должно быть определено место для аппаратуры, осуществляющей передачу сигналов действия водителя по управлению поездом и контроль положения и состояния состава, а также место для оператора. Головной тягач может иметь только одну платформу 4, расположенную сзади кабины. У последующих тягачей по две платформы 4 - одна спереди кабины, другая сзади кабины. Платформы предназначены для размещения на них сцепных устройств. На платформу опирается вагон 2 во время движения, поэтому она должна быть достаточно широкой и остойчивой. Каждая платформа оборудована одной сцепной площадкой 8. Сцепная площадка предназначена для надежной сцепки тягача с вагоном.
Рулевые колеса 5 предназначены для управления тягачом. В механизм рулевого управления 6 входят механизм передачи информации и исполнительный механизм поворота рулевых колес. Кроме рулевых, необходимы путевые (ведущие) колеса 7. Их может быть два или четыре. Это непосредственный движитель тягача. Вращение получают от двигателя тягача. Двигатель 9 является основным силовым агрегатом тягача. Вагон 2 фиг.4 может представлять собой любую конструкцию. Это может быть грузовая фура, может быть какой-то специальный вагон, это может быть и пассажирский вагон и т.д., но он должен быть оборудован двумя сцепными площадками 8, расположенными по краям вагона снизу. Кроме того, вагон должен быть оборудован стояночными опорами 11. В зависимости от способа сцепления в сцепной площадке может располагаться и шкворень 12. На фиг.5 изображено стояночное положение вагона.
Исполнительный механизм автоматического рулевого управления тягача может быть выполнен в любом варианте. Все зависит от того, в каких условиях будет эксплуатироваться автопоезд, какие требования к нему будут предъявляться. Исполнительный механизм автоматического рулевого управления, представленный в данной работе фиг.6, работает следующим образом. Сигналы об отклонении колес от головного тягача поступает на приемники сигналов 22 всех последующих тягачей поезда. Записывающее устройство 23 записывает эти сигналы на носитель информации 26. В данной схеме это магнитная лента. Ведущий ролик 24 получает вращение от рулевого колеса и вращается со скоростью, кратной скорости вращения рулевого колеса. Считывающее устройство 25 расположено на некотором расстоянии l от ведущего ролика. Необходимым условием работы автоматического рулевого управления поезда является:
- жесткая связь ведущего ролика 24 системы передачи информации тягача с рулевым колесом этого тягача и
- соблюдение кратности и одинаковости расстояний между рулевыми колесами всех тягачей. То есть количество оборотов рулевого колеса должно быть кратно количеству оборотов ведущего ролика, а длина вагона должна быть такой, чтобы от оси рулевых колес одного тягача до оси рулевых колес другого тягача расстояние было одинаковым и кратным длине окружности рулевого колеса по его поверхности. Каждый последующий тягач автопоезда фиг.8 отстоит от головного тягача на некотором расстоянии L. Для каждого тягача эта величина будет своя. Тогда, если обозначить символами:
L - расстояние от головного тягача «г» до тягача «n», где n=2, 3, ...,
R - радиус рулевого колеса тягача «n»,
k - число оборотов рулевого колеса тягача «n», укладывающееся в расстояние от оси рулевого колеса головного тягача до оси рулевого колеса тягача «n», то

При движении автопоезда точки 1 рулевое колесо тягача n достигнет, преодолев от своей точки 2 до точки 1 это расстояние L. При этом оно сделает k оборотов. Если в точке 1 от рулевого управления головного тягача поступит сигнал о повороте рулевого колеса, этот сигнал сразу же поступает на записывающие устройства всех тягачей и будет записан ими на носитель информации. Необходимо, чтобы счетчик тягача n снял сигнал, записанный головным тягачом в точке 1 именно тогда, когда ось рулевого колеса тягача n будет в точке 1. В механизме передачи информации (фиг.7) l - расстояние от устройства, записывающего сигнал, до устройства, считывающего сигнал, r - радиус ролика, ведущего магнитную ленту, i - число кратности вращения ролика вращению рулевого колеса. При скорости вращения ролика большей, чем скорость вращения рулевого колеса, это число больше единицы, при меньшей - меньше единицы. Тогда как рулевое колесо сделает k оборотов, ролик 25, протягивающий магнитную ленту, сделает ki оборотов. Сигнал вместе с лентой пройдет некоторое расстояние 1. Чему же равно это расстояние? Очевидно, (фиг.10) это расстояние будет зависеть и от количества оборотов ролика, которые он совершит от записи сигнала до его считывания, и от радиуса r этого ролика. Но так как по условию ролик жестко связан с рулевым колесом, его угловая скорость вращения будет кратной угловой скорости вращения рулевого колеса. Значит, если для прохождения пути L рулевое колесо сделает k оборотов, то ролик записывающего устройства сделает ki оборотов и пройдет расстояние l, равное произведению длины окружности ролика 2πr на количество оборотов ki

Из этого следует, что если мы поставим счетчик на расстоянии l=2πrki от записывающей головки, то рулевое колесо тягача n получит сигнал на поворот именно в точке 1 и тягач  пойдет по колее головного тягача.
пойдет по колее головного тягача.
При составе поезда оператор вставляет считывающее устройство в гнездо на панели «а» фиг.7, имеющее номер такой же, как номер тягача по счету, начиная от головного тягача, и схема готова к работе. При пробном проезде оператор отрегулирует работу схемы, подвинув «счетчик» регулирующим устройством в ту или другую сторону (указано стрелками). Для того чтобы автопоезд имел возможность в определенных случаях управляться оператором, необходимо сделать так, чтобы сигнал с пульта оператора превалировал над автоматикой. Электрический сигнал, поступающий с устройства, считывающего сигнал, поступает на электрические клапаны тягача ЭК1-ЭК5 (14) фиг.6. Предположим, что со счетчика сигналов данного тягача поступил сигнал - «повернуть вправо». Тогда ЭК1 сдвигает клапан влево, и открывается правая напорная воздушная магистраль. Воздух высокого давления поступает в силовой цилиндр ПР (16). Поршень этого цилиндра давит на жидкость, находящуюся в нем с другой стороны. В магистрали высокого давления жидкости клапан ЭК3 перекрывает сливную магистраль и открывает рабочую магистраль. Жидкость поступает в правую сторону рабочего цилиндра (13). Одновременно клапан ЭК2 перекрывает рабочую магистраль и открывает сливную магистраль левой стороны рабочего цилиндра, а ЭК4 открывает дренажную магистраль воздушной системы. Рабочая жидкость из левой половины рабочего цилиндра (13) через открытую сливную магистраль поступает в сливную емкость СБ (15). Воздух левого силового цилиндра через открытый дренажный клапан ЭК4 выходит из под поршня. Левый силовой поршень под действием пружины опускается до упора (18) вниз. Рабочая жидкость из сливной емкости заполняет левый рабочий цилиндр, если он не был в исходном положении. Рабочий поршень сдвигается влево, рулевое колесо (5) поворачивается вправо. Рулевое колесо связано, в нашем случае, через переменное сопротивление, с коммутатором обратной связи (21). В коммутаторе обратной связи вырабатывается сигнал, являющийся функцией от угла поворота рулевого колеса. Этот сигнал (фиг.7) поступает в устройство, считывающее информацию (25) (счетчик). Суммарный сигнал поступает на исполнительные механизмы. Как только рулевое колесо повернулось на угол, задаваемый ему записью от головного тягача, сумма сигналов становится равной нулю. Тогда со считывающего устройства на исполнительные механизмы сигнал не поступает, и поворот рулевого колеса прекращается.
Для управления системой подачи топлива в двигателе, КПП и тормозами могут быть различные варианты. Остановимся на электромеханическом (фиг.10). Сигнал об изменении положения рычага управления или системой подачи топлива в двигателе, или тормозами в нашем случае формирует переменное сопротивление R0-Rmax, в КПП сигнал формируют фиксаторы переключения передач 1с, 2с, ... пс. Сигнал об изменении положения рычага управления или системой подачи топлива в двигателе, или тормозами, от головного тягача поступает в коммутатор сигналов 29 головного тягача. Из коммутатора сигнал поступает сразу на приемники сигналов всех тягачей поезда 22. Эти сигналы через коммутаторы сигналов 30 последующих тягачей поезда идут на исполнительные механизмы тягачей 31. От прибора контроля положения исполнительного механизма 32 (переменного сопротивления, например), контролирующего положение рычага управления или системой подачи топлива в двигателе, или тормозами, сигнал через коммутаторы обратной связи 21 поступает обратно в коммутаторы сигналов 31. Сравнивающая система сравнивает сигнал, поступающий от исполнительного механизма, с сигналом головного тягача и вырабатывает соответствующий сигнал на исполнительный механизм. Механизм управления системой подачи топлива в двигателе может быть связан и со сцепным устройством. Чем сильнее натяжение сцепного устройства, тем больше подача топлива.
Итак, если выполнить те технические решения, о которых было сказано выше, а именно составить поезд из вагонов, соединенных между собой, движущими их тягачами, оборудовать тягачи соответствующей аппаратурой по управлению автопоездом и контролю за ним, мы получим автопоезд, который может включать в себя большое количество вагонов, управляться одним человеком и обладать маневренностью одного тягача.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕВОЗОК С ПОВОРОТНОЙ ГРУЗОВОЙ ПЛАТФОРМОЙ. | 2013 |
|
RU2585675C2 |
| БОЛЬШЕГРУЗНОЕ МНОГОЗВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2630039C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
| СЕДЕЛЬНЫЙ ТЯГАЧ | 2003 |
|
RU2236365C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением | 2016 |
|
RU2618611C1 |
| БЛОЧНАЯ КОРОБКА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2004 |
|
RU2287439C2 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА ДЛЯ ПЕРЕВОЗКИ КОЛЕСНОЙ ТЕХНИКИ И КОНТЕЙНЕРОВ | 1998 |
|
RU2151703C1 |
| Двухзвенное транспортное средство | 1979 |
|
SU821278A1 |





Изобретение относится к области транспортной техники, а именно - к автопоездам. Автопоезд - это поезд, предназначенный для движения по автомобильным дорогам. Автопоезд состоит из вагонов и двигающих эти вагоны тягачей, поочередно соединенных с ними. Каждый вагон имеет по две сцепные площадки, расположенные снизу, по одной на каждом краю. Этими площадками вагоны ложатся на платформы тягачей и сцепляются с ними. Головной тягач имеет одну платформу. Каждый последующий тягач имеет две платформы со сцепными площадками, на которых располагаются и с которыми сцепляются края двух вагонов. Последующие тягачи снабжены автоматической системой управления, позволяющей им следовать по колее головного тягача, что позволяет автопоезду обладать маневренностью одного тягача и управляться одним человеком. Технический результат - большая маневренность и упрощение и удешевление эксплуатации. 10 ил.
Автопоезд, предназначенный для движения по автомобильным дорогам, отличающийся тем, что состоит из вагонов и двигающих эти вагоны тягачей, поочередно соединенных с ними, при этом каждый вагон имеет по две сцепные площадки, расположенные снизу, по одной на каждом краю, этими площадками вагоны ложатся на платформы тягачей и сцепляются с ними, головной тягач имеет одну платформу, каждый последующий тягач имеет две платформы со сцепными площадками, на которых располагаются и с которыми сцепляются края двух вагонов, при этом последующие тягачи снабжены автоматической системой управления, позволяющей им следовать по колее головного тягача, что позволяет автопоезду обладать маневренностью одного тягача и управляться одним человеком.
| Способ управления колесными осями автопоезда | 1973 |
|
SU521175A1 |
| СОСТАВНОЕ ШАРНИРНОЕ СОЧЛЕНЕНИЕ МЕЖДУ ДВУМЯ САЛОНАМИ ПАССАЖИРСКОГО ТРАНСПОРТНОГО СРЕДСТВА, ОТДЕЛЕННЫМИ ДРУГ ОТ ДРУГА ПРОМЕЖУТОЧНЫМ МОДУЛЕМ, ОПИРАЮЩИМСЯ НА ОДНУ КОЛЕСНУЮ ОСЬ | 1997 |
|
RU2189921C2 |
| US 5700023 A, 23.12.1997 | |||
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ ПЛЕЧЕЛОПАТОЧНЫМ ПЕРИАРТРОЗОМ | 2014 |
|
RU2549436C1 |

