Изобретение относится к устройствам для управления безрельсовыми транспортными средствами, в частности длиннобазным автопоездам, и касается их систем управления.
Известна система управления поворотом колес полуприцепа, содержащая датчики угла складывания автопоезда и ручного управления электрически, связанные с блоком управления, выполненным в виде поляризованного реле, соединенного с электромагнитами гидрораспределителя и датчиком обратной связи по положению управляемой оси полуприцепа, четырехходовой трехпозиционный распределитель с управлением от электромагнитов, соединенный гидролиниями через регулятор расхода с насосом, сливом с баком и напорными гидролиниями с гидроцилиндрами двойного действия, шарнирно соединенными одним своим концом с управляемой осью полуприцепа, а другим - с его рамой (С.С. Атаев, В.Б. Кулик. Специализированный технологический транспорт в строительстве. Минск, 1971, с. 117-119).
Недостатками данной системы являются неудовлетворительная маневренность и курсовая устойчивость движения автопоезда в различных дорожных условиях, возникающих вследствие низкой точности отработки задающих сигналов системой управления при применении поляризованного реле для включения электромагнитов.
Прототипом системы управления длиннобазного автопоезда является система управления, содержащая датчик угла складывания автопоезда, датчик обратной связи по положению управляемых колес полуприцепа, электрически соединенные с электронным блоком управления (ЭБУ), блок ручного управления по радиоканалу, соединенный с ЭБУ. ЭБУ соединен входами с задающим датчиком и датчиком обратной связи, а выходами - с исполнительным органом системы управления, выполненным в виде электрогидравлического усилителя (Система управления ETS. Проспект фирмы VSE, https://www.v-s-e.com/uploads/documents/ets_trailer_nl_2009.pdf).
Недостатками данной системы управления являются отсутствие возможности минимизировать габаритную полосу движения, увеличивающуюся вследствие изменения базы полуприцепа, невозможность контролировать соответствие реального движения автопоезда желаемому, задаваемому управляющими действиями водителя.
Задача изобретения - повышение маневренности и управляемости длиннобазного автопоезда.
Поставленная задача достигается тем, что система управления длиннобазного автопоезда, содержащая датчик угла складывания автопоезда и датчик обратной связи по положению управляемых осей полуприцепа, электрически соединенные с электронным блоком управления (ЭБУ), блок ручного управления по радиоканалу, соединенный с ЭБУ, причем входами ЭБУ соединен с задающим датчиком и датчиками обратной связи, а выходами - с исполнительным органом системы управления, выполненным в виде электрогидравлического усилителя, состоящего из четырехлинейного трехпозиционного электроуправляемого гидрораспределителя, соединенного с исполнительными силовыми цилиндрами двойного действия, механически связанными с управляемыми осями полуприцепа и его рамой и гидравлически соединенными через четырехлинейный трехпозиционный электроуправляемый гидрораспределитель с гидронасосом и гидробаком, снабжена датчиком угла поворота управляемых колес тягача, датчиками бокового ускорения и угловой скорости относительно вертикальной оси полуприцепа, датчиком измерения базы полуприцепа, датчиком скорости и гидроаккумуляторами с блоком поддержания заданного давления жидкости, причем ЭБУ имеет основной и корректирующий каналы управления.
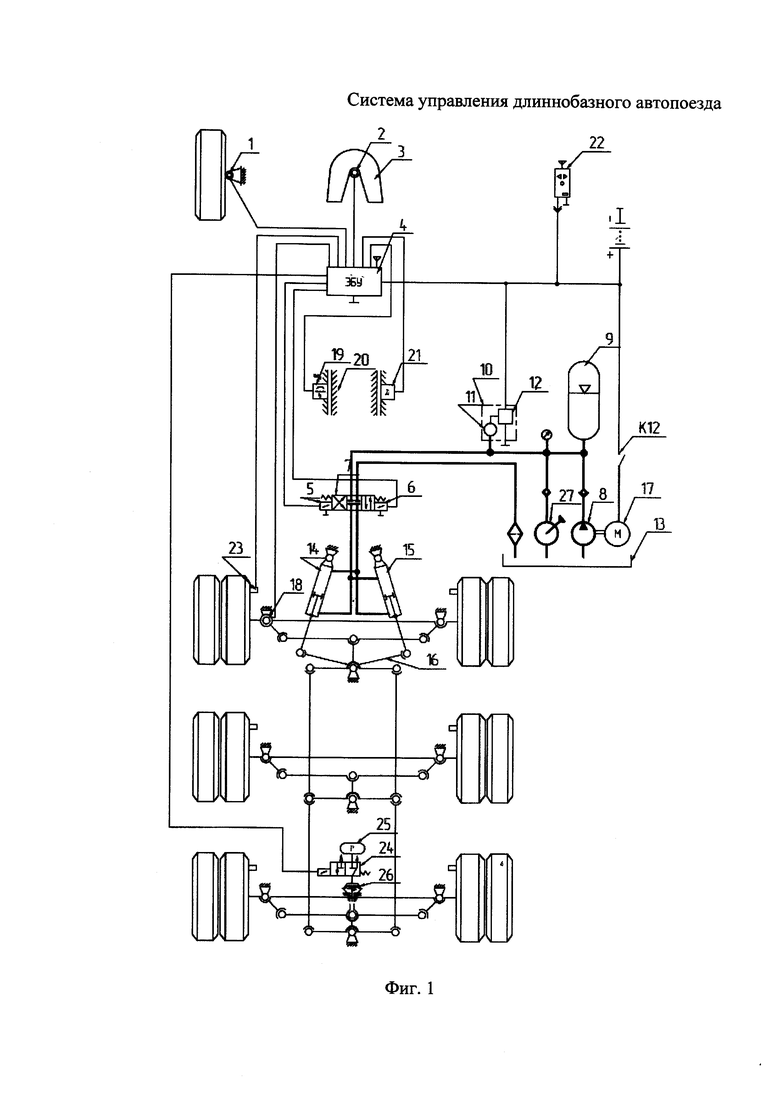
На фиг. 1 представлена принципиальная схема предложенной системы управления длиннобазного автопоезда.
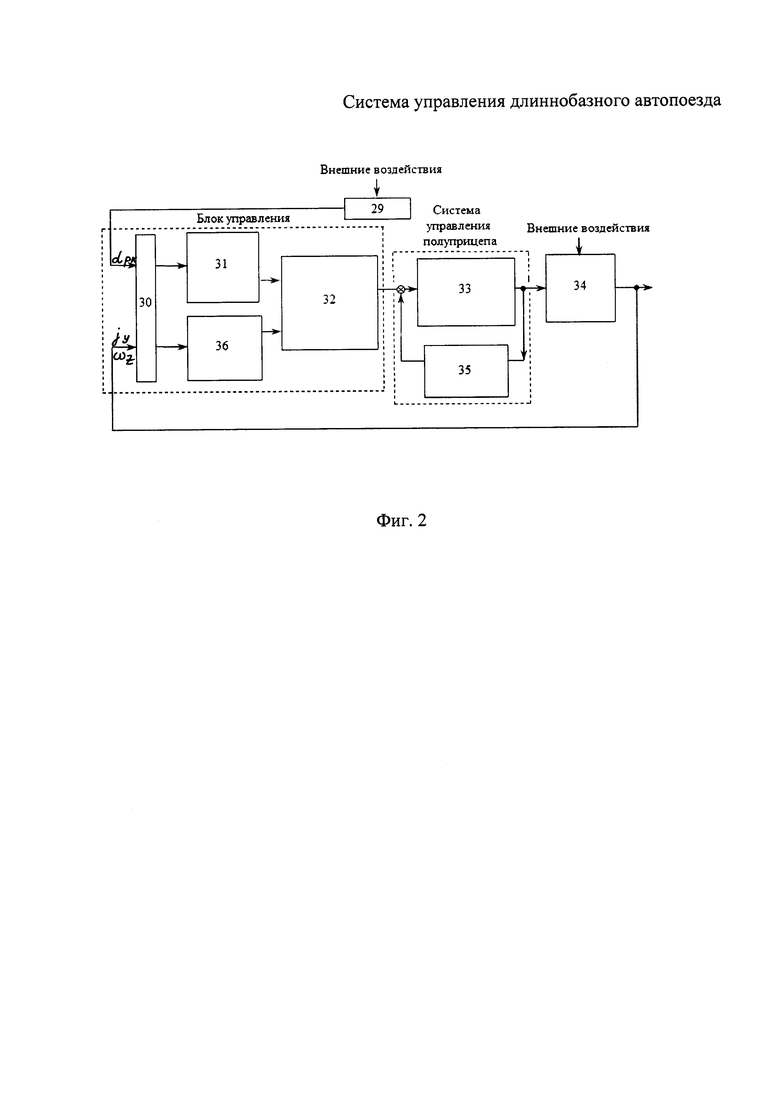
На фиг. 2 представлена структурная схема системы управления длиннобазного автопоезда.
Система управления длиннобазного автопоезда содержит датчик угла поворота управляемых колес тягача 1, датчик угла складывания автопоезда 2, механически связанный с опорно-сцепным устройством тягача 3. Задающие датчики 1 и 2 соединены с электронным блоком управления (ЭБУ) 4. Выходы ЭБУ 4 соединены с электромагнитами 5 и 6 четырехлинейного трехпозиционного электроуправляемого гидрораспределителя 7. Гидрораспределитель 7 напорной гидролинией соединен с насосом 8, гидроаккумулятором 9 и блоком автоматического поддерживания заданного давления рабочей жидкости 10, состоящего из датчика давления 11 и реле включения 12 насоса 8. Сливной гидролинией гидрораспределитель 7 соединен с баком 13. Гидролиниями гидрораспределитель 7 соединен с гидроцилиндрами двойного действия 14 и 15, шарнирно соединенными одним своим концом с приводом управляемых осей 16 полуприцепа, а другим - с его рамой. Датчик давления 11 соединен с контактами К12 реле включения 12, электрически связанными с электродвигателем 17 привода насоса 8. Датчик обратной связи 18 по положению управляемых осей соединен с ЭБУ 4.
Датчики бокового ускорения и угловой скорости относительно вертикальной оси полуприцепа 19, расположенные на раме полуприцепа 20, датчик измерения базы полуприцепа 21 соединены с ЭБУ 4.
Кроме того, система управления содержит блок ручного управления 22 по радиоканалу,соединенный с ЭБУ 4.
Для определения реальной скорости полуприцепа используется датчик ABS 23.
Распределитель 24 пневматически соединен с ресивером 25 и устройством фиксирования 26 управляемой оси полуприцепа.
Ручной насос 27 соединен через обратный клапан с напорной гидролинией.
Блок датчиков обратной связи 28 - бокового ускорения полуприцепа jy и угловой скорости относительно вертикальной оси ωz соединен с блоком управления 4.
Система управления может работать в автоматическом и ручном режимах.
Работа в автоматическом режиме осуществляется следующим образом.
При прямолинейном движении электрический сигнал с задающего датчика угла складывания автопоезда поступает в устройство сравнения ЭБУ 4, сравнивается с сигналом датчика обратной связи 18 по положению управляемых осей. Если они равны, на выходе устройства сравнения напряжение равно нулю, то же самое на выходе усилителя мощности, электромагниты 5 и 6 гидрораспределителя 7 обесточены и гидрораспределитель нормально закрыт. Управляемые оси полуприцепа находятся в исходном положении, соответствующему прямолинейному движению. При повороте автопоезда в какую-либо сторону в устройстве сравнения появляется разность сигналов задающего датчика 1 и датчика обратной связи 18. В зависимости от величины рассогласования срабатывает пороговое устройство и с усилителя мощности напряжение подается на соответствующий электромагнит 5 или 6 гидрораспределителя 7. Срабатывая, электромагнит смещает в соответствующую сторону золотник гидрораспределителя 7 и связывает напорную гидролинию с гидроцилиндрами двойного действия 14 и 15. Гидрораспределитель будет открыт до тех пор, пока управляемые оси не займут соответствующее положение, и при этом сравняются значения параметров задающего датчика 1 и датчика обратной связи 18 по положению управляемой оси.
Переход на ручное управление осуществляется из кабины водителя и производится в тех случаях, когда необходим поворот управляемых осей полуприцепа независимо от угла складывания автопоезда, например при маневрировании в ограниченном пространстве.
При этом направление поворота управляемых осей полуприцепа и тягача может быть направлено в одну сторону, что позволяет автопоезду осуществлять плоскопараллельное движение в боковом направлении.
При переходе на автоматическое управление управляемые оси полуприцепа автоматически устанавливаются в соответствии с углом складывания автопоезда.
Система управления длиннобазного автопоезда изменяет функциональную зависимость между углом складывания автопоезда и углом поворота управляемых осей полуприцепа в зависимости от базы полуприцепа при использовании телескопической рамы полуприцепа 20.
Датчик измерения базы полуприцепа 21 фиксирует реальное значение базы полуприцепа и в соответствии с ее значением ЭБУ выбирает из табличных значений оптимальную функциональную зависимость между углом складывания автопоезда и углом поворота управляемых осей полуприцепа, обеспечивающую оптимальные показатели маневренности автопоезда.
Система управления длиннобазным автопоездом имеет два канала управления (фиг. 2): основной, отрабатывающий заданное водителем управляющее воздействие в виде угла поворота рулевого колеса αрк, и корректирующий, использующий в качестве задающих параметров сигналы с датчиков обратной связи: скорость движения автопоезда νx, боковое ускорение полуприцепа jy и его угловую скорость относительно вертикальной оси ωz.
В основном канале управляющее воздействие водителя 29 в виде сигнала угла поворота рулевого колеса αрк через адаптер 30 поступает в блок управления, где с использованием математической модели номинального поведения автопоезда 31 преобразуется в блоке логики 32 в управляющий сигнал системы управления 33 поворотом управляемых осей полуприцепа 34. Система управления 33 представляет собой исполнительный механизм в виде электрогидравлического привода с датчиком обратной связи 35.
В номинальной математической модели рассчитываются параметры движения автопоезда, которые соответствуют движению в идеальных условиях на дороге с высоким коэффициентом сцепления.
Второй контур управления - корректирующий. Сигнал с датчиков обратной связи νx, jy, ωz через адаптер 30 поступает в блок управления, где в математической модели фактического поведения 36 определяются параметры реального движения автопоезда.
Результаты расчетов номинальных и реальных параметров сравниваются и с использованием элементов логики в блоке 30 определяются корректирующие воздействия в виде ±dα3 - угла поворота управляемых осей полуприцепа.
В качестве критерия оптимизации в системе управления принимается величина смещения траектории тележки полуприцепа относительно траектории тягача. В идеале - совмещение траекторий тягача и тележки полуприцепа.
Фиксирование управляемых осей полуприцепа осуществляется с целью повышения устойчивости движения полуприцепа на высоких скоростях.
Ручной насос 27 используется в аварийных ситуациях для возвращения управляемых осей в положение, соответствующее прямолинейному движению.
Техническим результатом предлагаемой системы управления является повышение маневренности и управляемости длиннобазного автопоезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 1994 |
|
RU2094282C1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| Устройство для управления колесами прицепа | 1988 |
|
SU1505830A1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU856883A1 |
| Система рулевого управления многозвенного большегрузного седельного автопоезда | 1988 |
|
SU1664643A1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU872366A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
Изобретение относится к устройствам для управления безрельсовыми транспортными средствами. Система управления длиннобазного автопоезда содержит датчик угла складывания автопоезда и датчик обратной связи по положению управляемых осей полуприцепа, электрически соединенные с электронным блоком управления (ЭБУ), блок ручного управления по радиоканалу, соединенный с ЭБУ, датчик угла поворота управляемых колес тягача, датчики бокового ускорения и угловой скорости относительно вертикальной оси полуприцепа, датчик измерения базы полуприцепа, датчик скорости и гидроаккумуляторы с блоком поддержания заданного давления жидкости. ЭБУ имеет основной и корректирующий каналы управления. Входами ЭБУ соединен с задающим датчиком и датчиками обратной связи, а выходами - с исполнительным органом системы управления. Система управления выполнена в виде электрогидравлического усилителя, состоящего из четырехлинейного трехпозиционного электроуправляемого гидрораспределителя. Гидрораспределитель соединен с исполнительными силовыми цилиндрами двойного действия. Силовые цилиндры механически связаны с управляемыми осями полуприцепа и его рамой и гидравлически соединены через четырехлинейный трехпозиционный электроуправляемый гидрораспределитель с гидронасосом и гидробаком. Достигается повышение маневренности и управляемости длиннобазного автопоезда. 2 ил.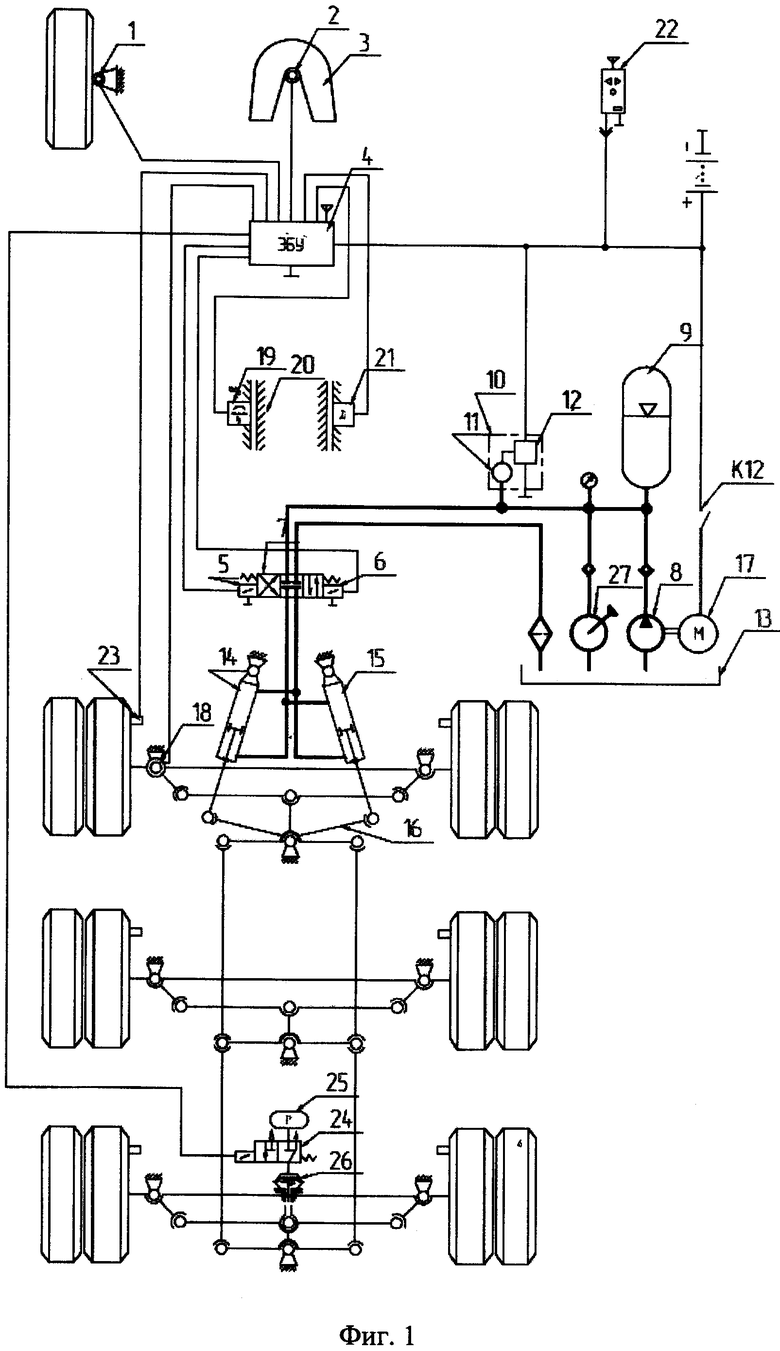
Система управления длиннобазного автопоезда, содержащая датчик угла складывания автопоезда и датчик обратной связи по положению управляемых осей полуприцепа, электрически соединенные с электронным блоком управления (ЭБУ), блок ручного управления по радиоканалу, соединенный с ЭБУ, причем входами ЭБУ соединен с задающим датчиком и датчиками обратной связи, а выходами - с исполнительным органом системы управления, выполненным в виде электрогидравлического усилителя, состоящего из четырехлинейного трехпозиционного электроуправляемого гидрораспределителя, соединенного с исполнительными силовыми цилиндрами двойного действия, механически связанными с управляемыми осями полуприцепа и его рамой и гидравлически соединенными через четырехлинейный трехпозиционный электроуправляемый гидрораспределитель с гидронасосом и гидробаком, отличающаяся тем, что система управления снабжена датчиком угла поворота управляемых колес тягача, датчиками бокового ускорения и угловой скорости относительно вертикальной оси полуприцепа, датчиком измерения базы полуприцепа, датчиком скорости и гидроаккумуляторами с блоком поддержания заданного давления жидкости, причем ЭБУ имеет основной и корректирующий каналы управления.
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| US 4455035 A, 19.06.1984 | |||
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794782A2 |

