Изобретение относится к транспортному машиностроению, в частности к приводам управляемых колес полуприцепов.
Наиболее близким к заявляемому изобретению является система рулевого управления многозвенного большегрузного седельного автопоезда [1]. Указанная система содержит рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, качающийся рычаг, кинематически связанный с копиром и со штоком задающего гидроцилиндра, гидравлически соединенного своими полостями посредством гидролиний с полостями исполнительного гидроцилиндра, шток которого кинематически связан через распределительный золотник с силовым гидроцилиндром, механически связанным посредством тяг с рулевой трапецией прицепного звена, и дополнительный гидроцилиндр.
Недостатками данной системы являются низкая надежность ввиду наличия общей гидравлической системы тягача и прицепа с большой протяженностью гидравлических магистралей, стенки которых работают на изгиб при складывании автопоезда, отсутствие автономного гидроусилителя и гидронасоса на полуприцепе, что приводит к увеличению усилий на рулевом колесе тягача при изменении траектории движения автопоезда, необходимость доукомплектования тягача (с внесением изменений в его конструкцию) большим количеством элементов системы: дополнительным гидроцилиндром, задающим гидроцилиндром, гидравлическим трубопроводом, копиром, качающимся рычагом, роликом, рычагом, связанным с рулевой трапецией тягача; увеличенное время сцепки-расцепки автопоезда, обусловленное необходимостью соединения-разъединения гидравлических магистралей.
Технический результат направлен на повышение надежности системы, снижение усилий на рулевом колесе тягача, упрощение конструкции, осуществляющей задание параметров угла поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда, повышение характеристик маневренности и проходимости седельного автопоезда [2, 3] за счет уменьшения ширины габаритного коридора седельного автопоезда при криволинейном движении и совпадения следов качения колес тягача и прицепа, снижение интенсивности износа шин полуприцепа за счет уменьшения юза колес полуприцепа при повороте автопоезда с минимальным радиусом и повышение устойчивости движения полуприцепа.
Технический результат достигается тем, что система рулевого управления одноосным полуприцепом седельного автопоезда, содержащая рулевую трапецию прицепного звена, связанную с поворотными колесами, исполнительный силовой цилиндр, шток которого с одной стороны кинематически связан с рулевой трапецией, с другой стороны через золотниковый гидрораспредилитель и механический рулевой привод параллелограммного типа - с копиром, в качестве которого используются закрепленное на седельно-сцепном устройстве тягача посредством качающейся штанги задающее устройство, двигающееся по дугообразной прорези переменной кривизны и сечения, расположенной в нижней части опорной плиты полуприцепа, обеспечивая заданный закон изменения угла поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда и стабилизацию управляемых колес полуприцепа при переходе автопоезда от криволинейного движения к прямолинейному, отличающаяся тем, что гидравлическая система рулевого управления прицепного звена автономная и не связана с гидравлической системой рулевого управления тягача, имеет собственную гидроемкость и гидронасос, механический копир имеет прорезь специального рассчитанного профиля для обеспечения поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда, фиксаторами, обеспечивающими качение колес автопоезда "след в след", а также подпружиненные ролики, способствующие возвращению задающего устройства в нейтральное положение для стабилизации управляемых колес полуприцепа.
Отличительными признаками от прототипа является то, что гидравлическая система привода управляемой оси прицепного звена автономна (не связана с рулевым приводом тягача - все элементы системы расположены на прицепе) имеет собственный масляный бак и гидронасос, механический копир, состоящий, из штанги, шарнирно закрепленной на задней части опорной плиты седельно-сцепного устройства тягача, задающего устройства, двигающегося при складывании автопоезда по дугообразной прорези переменной кривизны и сечения, расположенной в нижней части опорной плиты полуприцепа.
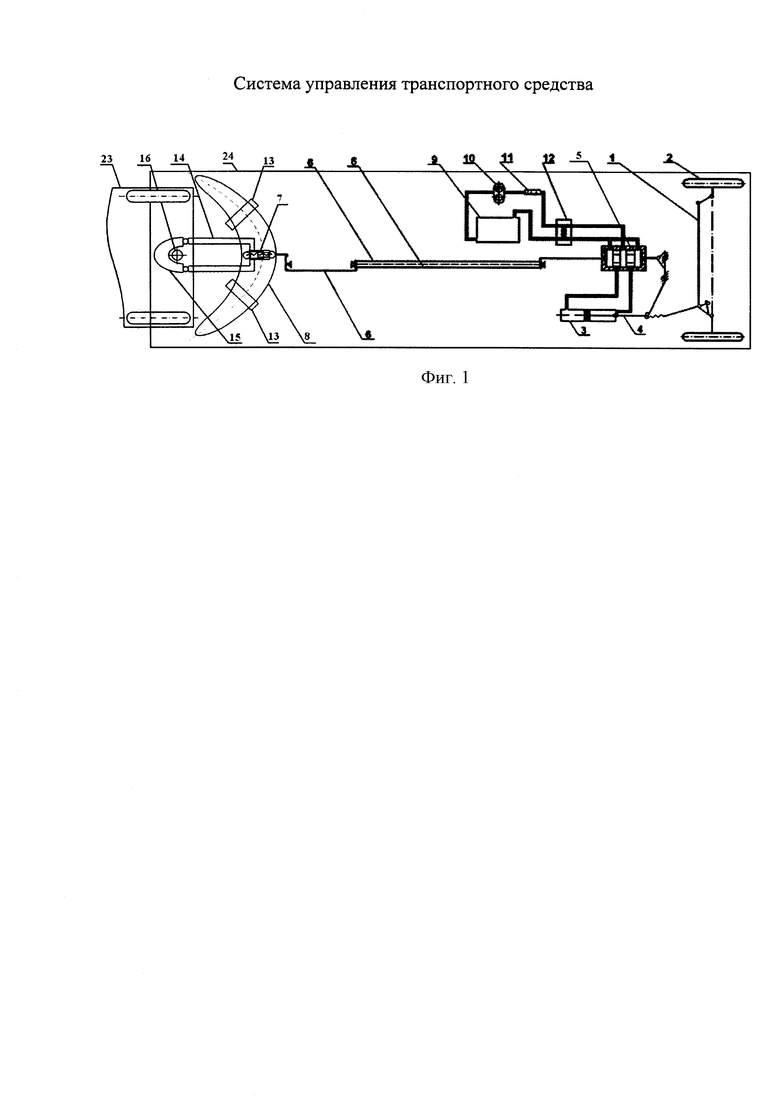
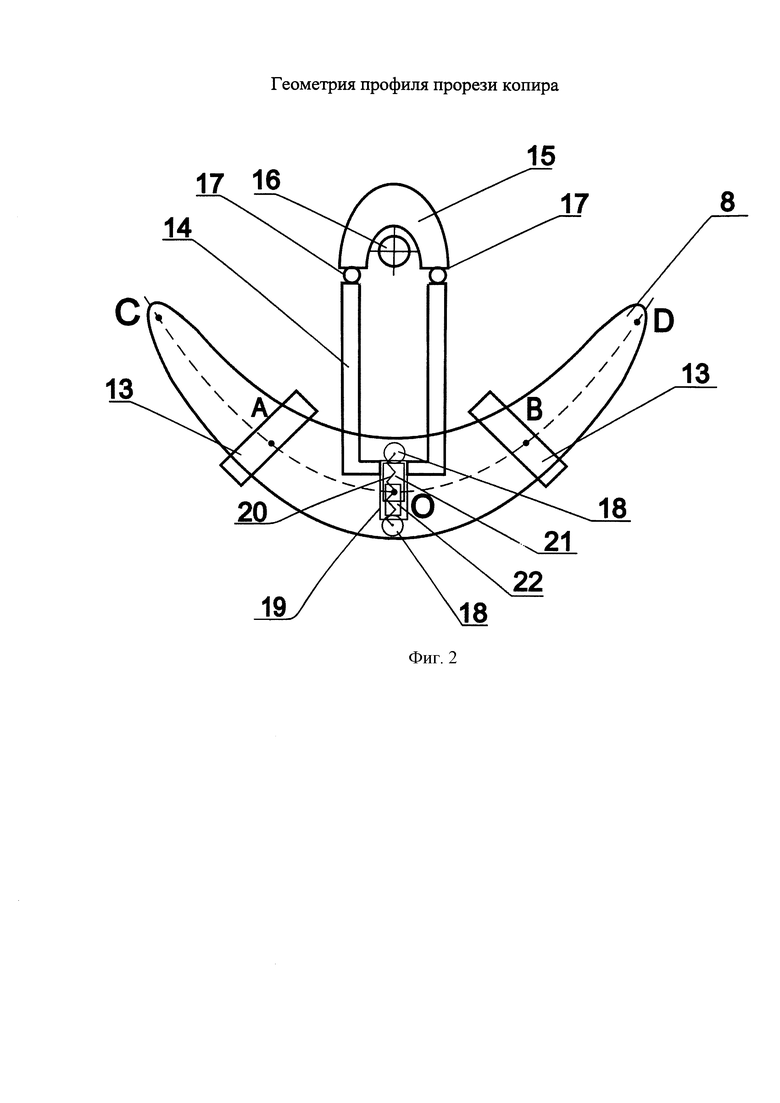
Схема предлагаемой системы рулевого управления одноосного полуприцепа седельного автопоезда представлена на фиг. 1; на фиг. 2 - механический копир.
Система рулевого управления (фиг. 1) включает: рулевую трапецию прицепа 1, связанную с поворотными колесами 2, исполнительный цилиндр 3, шток 4, золотниковый гидрораспределитель 5, который кинематически связан посредством тяг 6 с задающим устройством 7, установленным в прорези 8 специального профиля переменной кривизны и сечения.
Автономная гидросистема включает масляный бак полуприцепа 9, гидронасос 10, и приборы 11, 12, обеспечивающие работу системы.
Задающее устройство 7 (фиг. 2) состоит из: двух роликов 18, корпуса 19, соединенного с тягами 6, пружины 20, внешней 21 и внутренней 22 труб, обеспечивающих правильную деформацию пружины. Задающее устройство соединено с седельно-сцепным устройством тягача 15 посредством штанги 14, крепление которой к седельно-сцепному устройству осуществляется шарнирами 17 (шарнирное крепление штанги позволяет осуществлять соединение-разъеденение сцепного шкворня полуприцепа 16 с седельно-сцепным устройством тягача и обеспечивает требуемые углы гибкости автопоезда в продольной вертикальной плоскости).
Геометрические размеры прорези 8 задают требуемые углы поворота управляемых колес полуприцепа в зависимости от угла складывания звеньев автопоезда. При этом перемещении задающего устройства по участкам OA и ОВ прорези обеспечивает поворот колес полуприцепа на углы, соответствующие качению колес полуприцепа внутри следа колес тягача. Ограничение перемещения задающего устройства по дуге АОВ обеспечивается посредством механических фиксаторов 13. В оконечностях прорези 8 имеются сужения, при качении по поверхности которых подпружиненные ролики сжимаются, уходя внутрь корпуса задающего устройства. При переходе автопоезда от криволинейного движения к прямолинейному силы упругости от сжатой пружины стремятся переместить задающее устройство из узкой части прорези к среднему положению (точке О), обеспечивая тем самым стабилизацию управляемых колес полуприцепа.
Устройство работает следующим образом. При криволинейном движении автопоезда происходит поворот тягача 23 и полуприцепа 24 относительно друг друга в продольной горизонтальной плоскости и перемещение задающего устройства 7 в прорези 8 по соответствующей дуге CAOBD (фиг. 2). Перемещение задающего устройства посредством тяг 6 рулевого привода вызывает смещение золотника гидрораспределителя 5, сопровождаемое подачей рабочей жидкости под давлением из масляного бака 9 гидронасосом 10 в исполнительный цилиндр 3. Перемещение штока 4 цилиндра через рулевую трапецию 1 вызывает поворот управляемых колес 2 на угол, пропорциональный продольному смещению управляющего штока 7, величина которого зависит от радиуса кривизны прорези 8.
Стабилизация управляемых колес полуприцепа достигается за счет того, что при движении задающего устройства по суженной части прорези подпружиненные ролики сжимаются, уходя внутрь корпуса. При переходе автопоезда от криволинейного движения к прямолинейному силы упругости от сжатых пружин стремятся переместить управляющий шток из узкой части прорези к среднему положению, способствуя тем самым стабилизации управляемых колес полуприцепа.
Таким образом, предлагаемая система управления поворотом транспортного средства имеет более простую конструкцию, чем прототипы, осуществляет поворот управляемых колес полуприцепа в зависимости от угла складывания автопоезда, повышает характеристики маневренности и проходимости седельного автопоезда, повышает устойчивость движения автопоезда с управляемыми колесами полуприцепа.
Использованные литературные источники
1. Пат. №509485, Российская Федерация. Система рулевого управления многозвенного большегрузного седельного автопоезда [Текст] / Гладков Г.И.; заявитель и патентообладатель Ряз. высш. возд. -десант. уч-ще. - опубл. 23.07.1991.
2. Васильченков, В. Ф. Автомобили и гусеничные машины. Теория эксплуатационных свойств [Текст] / В.Ф. Васильченков /Учебник, Рязань, «Тигель» - 2004. - 430 с.
3. Ширяев, П.П. О кинематическом расчете поворотных устройств автомобильных полуприцепов [Текст] / П. П. Ширяев / Сборник научных трудов - М: Воениздат., 1962. - 78 с.
Технико-экономическое обоснование на изобретение «универсальный гусеничный движитель высокомобильного транспортного средства»
Предлагаемое техническое решение позволяет повысить надежность системы, снизить усилие на рулевом колесе тягача, упростить конструкцию, осуществляющую задание параметров угла поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда, повышает характеристики маневренности и проходимости седельного автопоезда за счет уменьшения ширины габаритного коридора седельного автопоезда при криволинейном движении и совпадения следов качения колес тягача и прицепа, снижает интенсивность износа шин полуприцепа за счет уменьшения юза колес полуприцепа при повороте автопоезда с минимальным радиусом и повышает устойчивость движения полуприцепа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления многозвенного большегрузного седельного автопоезда | 1988 |
|
SU1664643A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА | 2006 |
|
RU2312034C1 |
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1989 |
|
SU1740229A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794781A2 |
| Система рулевого управления автопоезда | 1983 |
|
SU1131738A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
Изобретение относится к транспортному машиностроению, в частности к приводам управляемых колес полуприцепов. Система рулевого управления одноосным полуприцепом седельного автопоезда содержит рулевую трапецию прицепного звена, исполнительный силовой цилиндр, шток которого с одной стороны кинематически связан с рулевой трапецией, с другой стороны через золотниковый гидрораспределитель и механический рулевой привод параллелограммного типа - с копиром. В качестве механического рулевого привода используется закрепленное на седельно-сцепном устройстве тягача посредством качающейся штанги задающее устройство, двигающееся по дугообразной прорези переменной кривизны и сечения, расположенной в нижней части опорной плиты полуприцепа. Гидравлическая система рулевого управления прицепного звена автономная и не связана с гидравлической системой рулевого управления тягача. Механический копир имеет прорезь профиля рассчитанного специально для обеспечения поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда, фиксаторы, обеспечивающие качение колес автопоезда "след в след", и подпружиненные ролики, способствующие возвращению задающего устройства в нейтральное положение для стабилизации управляемых колес полуприцепа. Достигается повышение характеристик маневренности и проходимости седельного автопоезда. 2 ил.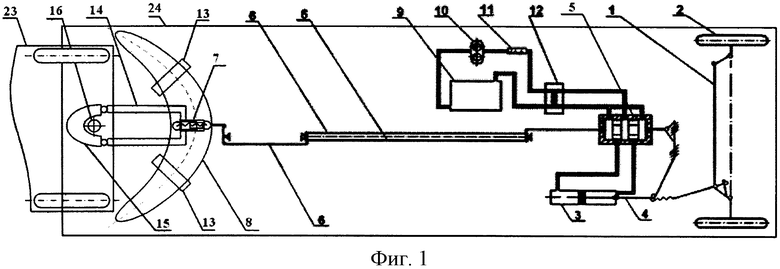
Система рулевого управления одноосным полуприцепом седельного автопоезда, содержащая рулевую трапецию прицепного звена, связанную с поворотными колесами, исполнительный силовой цилиндр, шток которого с одной стороны кинематически связан с рулевой трапецией, с другой стороны через золотниковый гидрораспредилитель и механический рулевой привод параллелограммного типа - с копиром, в качестве которого используется закрепленное на седельно-сцепном устройстве тягача посредством качающейся штанги задающее устройство, двигающееся по дугообразной прорези переменной кривизны и сечения, расположенной в нижней части опорной плиты полуприцепа, обеспечивая заданный закон изменения угла поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда и стабилизацию управляемых колес полуприцепа при переходе автопоезда от криволинейного движения к прямолинейному, отличающаяся тем, что гидравлическая система рулевого управления прицепного звена автономная и не связана с гидравлической системой рулевого управления тягача, имеет собственную гидроемкость и гидронасос, механический копир имеет прорезь профиля рассчитанного специально для обеспечения поворота управляемых колес полуприцепа в зависимости от угла складывания автопоезда, фиксаторы, обеспечивающие качение колес автопоезда "след в след", а также подпружиненные ролики, способствующие возвращению задающего устройства в нейтральное положение для стабилизации управляемых колес полуприцепа.
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА | 2006 |
|
RU2312034C1 |
| Система рулевого управления автопоезда | 1983 |
|
SU1131738A1 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |

