Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах предотвращения столкновения подвижного состава или локомотива, в частности при маневровых работах, с поездами, прибывающими на станцию или отправляющимися со станции.
Известна системы предотвращения столкновения подвижного состава. Система содержит поездную аппаратуру, постовые устройства и напольное оборудование. В напольное оборудование входят частотные генераторы соответствующих участков пути, ограждаемых перегонными и станционными светофорами. Генераторы устанавливают около путевых светофоров и присоединяются кабелем к участку рельсовой нити, пропорциональной длине участка пути, ограждаемого данным светофором. Стационарные постовые устройства, размещаемые на посту электрической централизации, управляют частотой генераторов у предупредительных и входных светофоров и выбирают требуемую длину активного участка рельсового пути пропорционально длине заданного маршрута приема. Существующие перегонные устройства автоматики (путевой блокировки и автоматической локомотивной сигнализации) обычным образом управляют проходными светофорами и передают на локомотив сигналы автоматической локомотивной сигнализации. Напольные и постовые устройства системы автоматического управления тормозами передают на локомотив информацию о длине: блок - участка, ограждаемого проходным светофором при автоблокировке; всего перегона при полуавтоматической блокировке; маршрута приема (отправления) на станции и о приеме поезда по главному или боковому пути станции при проследовании предвходного и входного светофоров. Генераторы проходных светофоров работают на частоте f1; выходных светофоров при полуавтоматической блокировке - на частоте f2; предвыходных и входных светофоров - на одной из фиксированных частот, отличающихся от частот f1 и f2 и зависящих от характера маршрута приема на главный или боковой путь станции. Длину маршрута приема определяют длиной секционированного активного участка рельсовой нити. Полная длина каждой секции пропорциональна соответствующей длине маршрута приема поезда на станцию. Режим работы системы автоматического управления тормозами выбирается таким образом, что поезд, движущийся с максимальной установленной для него скоростью, останавливается автоматически перед запрещающим сигналом одной ступенью торможения с последующим отпуском (см. Устинский А.А., Степенский Б.М., Цыбуля Н.А. и др. "Автоматика, телемеханика и связь на железнодорожном транспорте", М.: Транспорт, 1985, с.151-158).
Недостатком системы является отсутствие передачи информации на локомотив о разрешающем или запрещающем сигнале светофора при приеме подвижного состава на боковые некодируемые пути станции. Также на станциях с большим количеством путей и маршрутов приема поездов система не обеспечивает ограничение скорости движения локомотива и задание длины маршрута приема на каждом пути. Таким образом, у системы отсутствуют средства для эффективного исключения столкновений подвижного состава на станции, на поездных и маневровых путях при отсутствии кодирования путей вследствие ошибок машиниста.
В качестве прототипа принята известная система контроля положения подвижных объектов, в частности железнодорожных составов, содержащая "N" навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных первой приемной антенны, приемника спутниковых сигналов, вычислительного блока, модулятора, передатчика и передающей антенны, "К" подвижных объектов, содержащих последовательно соединенные первую приемную антенну, приемник спутниковых сигналов и вычислительный блок, последовательно соединенные вторую приемную антенну, приемник и демодулятор, выход которого соединен с вторым входом вычислительного блока, первый выход вычислительного блока соединен с информационным входом приемника спутниковых сигналов, согласно изобретению, в диспетчерский пункт введены последовательно соединенные вторая приемная антенна, приемник и демодулятор, выход которого соединен с вторым входом вычислительного блока, блок управления, соединенный с вычислительным блоком, в каждый из "К" подвижных объектов введены последовательно соединенные модулятор, передатчик и передающая антенна, вход модулятора соединен с вторым выходом вычислительного блока, блок управления, соединенный с вычислительным блоком (см. RU 2115140 C1, G 01 S 13/74, 10.07.98).
Известная система контроля подвижных объектов может быть использована для предотвращения столкновений локомотива или подвижного состава при маневровых работах на станции.
Недостатком системы являются ограниченные функциональные возможности, обусловленные лишь определением взаимного положения подвижных железнодорожных составов, и отсутствие средств для обеспечения требуемого алгоритма управления тормозной системой локомотива в зависимости от реальной обстановки при осуществлении маневровых работ.
Технический результат изобретения заключается в создании надежной системы предотвращения столкновения подвижного состава или локомотива на железнодорожной станции во время маневровых работ при приеме или отправлении поезда.
Технический результат достигается тем, что в системе предотвращения столкновения подвижного состава или локомотива с прибывающим или отправляющимся со станции поездом, содержащей "N" навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, приемника спутниковых сигналов и вычислительного блока, первый выход которого подключен к передатчику корректирующих сигналов, соединенному с передающей антенной, "К" подвижных объектов, на каждом из которых установлены первая приемная антенна, подключенная к бортовому приемнику спутниковых сигналов, и вторая приемная антенна, подключенная к приемнику корректирующих сигналов, выход которого соединен со вторым входом бортового приемника спутниковых сигналов, контрольно-корректирующая станция снабжена сервером, в память которого записана информация о движении поездов и об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, и радиомодемом с антенной, при этом первый и второй входы сервера подключены соответственно ко второму выходу вычислительного блока и к выходу радиомодема, а на каждом подвижном объекте установлены бортовая ЭВМ, в память которой записана информация об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, исполнительное устройство и дисплей, соединенные с выходами бортовой ЭВМ, бортовой радиомодем с антенной, измеритель тягового тока, датчик направления движения, датчик автосцепки, датчик давления в тормозном цилиндре, датчик давления в тормозной магистрали, датчик пути и скорости, датчик концевого крана локомотива, клавиатура, при этом выходы бортового радиомодема, бортового приемника спутниковых сигналов, измерителя тягового тока, датчика направления движения, датчика автосцепки, датчика давления в тормозном цилиндре, датчика давления в тормозной магистрали, датчика скорости, датчика концевого крана локомотива и клавиатуры соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым и десятым входами бортовой ЭВМ
Анализ просмотренной патентной и научно-технической информации позволяет сделать вывод об отсутствии аналогичных систем предотвращения столкновения локомотива или локомотива с вагонами при маневровых работах с прибывающим или отправляющимся со станции поездом с использованием спутниковой навигационной системы, которые позволяют обеспечить безопасность движения без внесения изменений в существующую железнодорожную автоматику, и системы обеспечения безопасности движения.
Таким образом, заявляемое изобретение является новым, имеет изобретательский уровень и может быть использовано в современных системах безопасности,
Сущность изобретения поясняется на фиг.1 схемой локомотивной части, фиг.2 схемой контрольно-корректирующей станции, расположенной в диспетчерском центре. Локомотивная часть системы (фиг.1) содержит бортовой приемник 1 спутниковых сигналов с антенной 2, приемник 3 корректирующих сигналов, подключенный ко второй приемной антенне 4, радиомодем 5 с антенной 6, бортовую ЭВМ 7, измеритель 8 тягового тока, датчик 9 направления движения, датчик 10 автосцепки, датчик 11 давления в тормозном цилиндре, датчик 12 давления в тормозной магистрали, датчик 13 пути и скорости, датчик 14 концевого крана, исполнительное устройство 15, дисплей 16 и клавиатуру 17, выход приемника 3 корректирующих сигналов соединен со вторым входом приемника 1 спутниковых сигналов, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый входы бортовой ЭВМ 7 соединены соответственно с выходом измерителя 8 тягового тока, выходом датчика 9 направления движения, выходом датчика 10 автосцепки, выходом датчика 11 давления в тормозном цилиндре, выходом датчика 12 давления в тормозной магистрали, выходом датчика 13 пути и скорости, выходом датчика 14 концевого крана, выходом клавиатуры 17, выход бортовой ЭВМ 7 соединен со входом исполнительного устройства 15, дополнительный выход бортовой ЭВМ 7 соединен со входом дисплея 16, выход радиомодема 5 соединен с первым входом бортовой ЭВМ 7, выход приемника 1 спутниковых сигналов связан со вторым входом бортовой ЭВМ 7 двухсторонней связью.
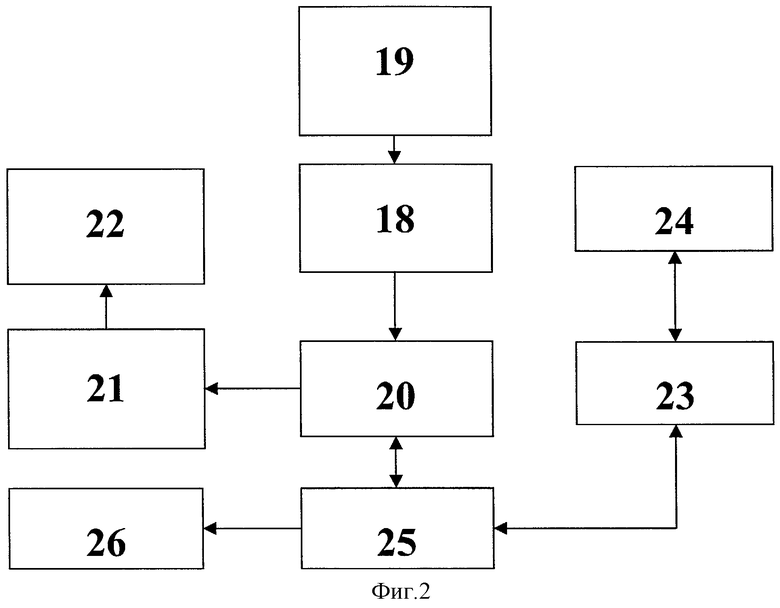
Контрольно-корректирующая станция, расположенная в диспетчерском центре, содержит приемник 18 спутниковых сигналов с приемной антенной 19, вычислительный блок 20, передатчик 21 корректирующих сигналов с передающей антенной 22, радиомодем 23 с антенной 24, сервер 25, дисплей 26. Первый выход вычислительного блока 20 соединен с входом передатчика 21 корректирующих сигналов, второй выход вычислительного блока 20 соединен с первым входом сервера 25 двухсторонней связью, выход приемника 18 спутниковых сигналов подключен ко входу вычислительного блока 20, дополнительный выход сервера 25 соединен с входом дисплея 26, а второй вход сервера 25 соединен с выходом радиомодема 23 двухсторонней связью.
Программное обеспечение оборудования контрольно-корректирующей станции, расположенной в диспетчерском центре, состоит из операционной системы, под управлением которой работает сервер, электронной карты станции с контрольными точками, обозначающими границы защитных зон, программы отображения электронной карты станции и оперативной обстановки, информации о движении поездов, программы обработки сигналов спутниковой навигационной системы, программы управления связью по цифровому радиоканалу, программы обработки данных, получаемых от локомотивов, программы, выдающей данные и команды локомотиву, программы диагностирования работоспособности станционной части системы. Электронная карта станции включает в себя номера и расположение путей, номера маршрутов, номера и координаты светофоров, номера и координаты стрелочных переводов, номера и координаты контрольных точек, обозначающих границы защитных зон, где запрещено движение.
Программное обеспечение локомотивной части системы состоит из операционной системы реального времени, под управлением которой работает бортовая ЭВМ; электронной карты станции с контрольными точками, обозначающими границы защитных зон, к которой приписан локомотив, программы обработки сигналов спутниковой навигационной системы, программы управления связью по цифровому радиоканалу, программы диагностирования, программы управления, которая выдает команду на остановку локомотива.
Система работает следующим образом.
Для высокоточного определения положения маневрового локомотива используется дифференциальный режим работы бортового приемника 1 спутниковых сигналов. Приемник 18 спутниковых сигналов с приемной антенной 19, вычислительным блоком 20, сервером 25, передатчиком корректирующих сигналов 21 с передающей антенной 22 используются для коррекции ошибок, вносимых в сигнал спутников навигации атмосферой, орбитальными эффектами, неточностью часов бортового приемника 1 спутниковых сигналов.
Система определения положения маневровых локомотивов с высокой точностью работает следующим образом. В диспетчерском центре (фиг.2) приемной антенной 19 принимаются сигналы от созвездия навигационных спутников системы ГЛОНАСС/НАВСТАР, которые обрабатываются в приемнике 18 спутниковых сигналов. С выхода приемника 18 сигналы, содержащие навигационную информацию, поступают в вычислительный блок 20. С сервера 25 в вычислительный блок 20 вводится информация о местоположении диспетчерского центра. Используя текущие измерения координаты диспетчерского центра и координату диспетчерского центра, полученную от сервера 25, которая считается истинной, вычислительный блок 20 рассчитывает дифференциальные поправки. Информация о поправках поступает на вход передатчика 21 корректирующих сигналов, а затем сигналы, содержащие информацию о дифференциальных поправках, излучаются передающей антенной 22.
На каждом локомотиве Л2, Л3 (фиг.3) сигналы, содержащие информацию о дифференциальных поправках, из диспетчерского центра (фиг.2) принимаются второй приемной антенной 4 (фиг.1), усиливаются и преобразуются в приемнике 3 корректирующих сигналов. С выхода приемника 3 корректирующих сигналов сигнал, содержащий информацию о дифференциальных поправках, поступает на вход бортового приемника 1 спутниковых сигналов, способного работать в дифференциальном режиме. Первой приемной антенной 2 принимаются сигналы от навигационных спутников, которые обрабатываются в бортовом приемнике 1 спутниковых сигналов. Получив сигналы от навигационных спутников и информацию о дифференциальных поправках, бортовой приемник 1 спутниковых сигналов определяет координаты локомотива. Полученные координаты передаются бортовым приемником 1 спутниковых сигналов в бортовую ЭВМ 7, которая отображает в удобной для восприятия машиниста форме полученную информацию на дисплее 16.
По сигналам от датчика 10 автосцепки и датчика 9 направления движения бортовая ЭВМ 7 определяет положение маневрового локомотива - в "голове", в "хвосте" или середине состава. Определение состояния тормозной системы маневрового локомотива осуществляется бортовой ЭВМ 7 по сигналам датчика 11 давления в тормозном цилиндре, датчика 12 давления в тормозной магистрали и датчика 14 концевого крана локомотива. Длина состава или количество вагонов при маневровых работах вводится в бортовую ЭВМ 7 вручную при помощи клавиатуры 17 или в автоматическом режиме. В автоматическом режиме длина состава оценивается бортовой ЭВМ 7 по сигналам измерителя 8 тягового тока. В этом случае оценка длины состава осуществляется с запасом. По сигналам датчика 13 скорости бортовая ЭВМ 7 осуществляет прицельное торможение к контрольной точке. Собранная и обработанная информация о длине состава, количестве вагонов, местонахождении локомотива, состоянии тормозной системы локомотива отображается бортовой ЭВМ 7 с помощью дисплея 16.
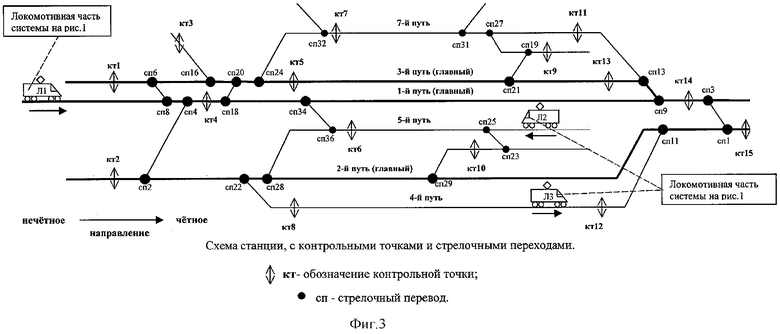
При принятии поезда Л1 (фиг.3) диспетчерский центр (фиг.2) подготавливает маршрут (далее защищаемый маршрут) следования по пути "1". Сервер 25 передает данные о защищаемом маршруте в радиомодем 23. Радиомодем 23 с помощью антенны 24 излучает сигналы, содержащие полученные данные, в эфир.
На каждом локомотиве Л2, Л3 эти сигналы принимаются с помощью антенны 6 радиомодемом 5 (фиг.1). С радиомодема 5 данные о защищаемом маршруте передаются на первый вход бортовой ЭВМ 7.
Если в памяти бортовой ЭВМ 7 содержится электронная карта станции, то бортовая ЭВМ 7 составляет массив из существующих на электронной карте контрольных точек, определяющих границы защитных зон и ограничения движения, с целью обеспечения защиты маршрута. В данном случае маршрут следования поезда проходит по пути "1" (фиг.3). В случае отсутствия электронной карты бортовая ЭВМ 7 передает запрос при помощи радиомодема 5 и антенны 6 в диспетчерский центр. Диспетчерский центр принимает запрос с помощью антенны 24 и радиомодема 23. Радиомодем 23 передает запрос серверу 25. Сервер 25 подготавливает ответ (электронную карту станции) и с помощью радиомодема 23 и антенны 24 передает его в эфир. На локомотиве, при помощи радиомодема 5 с антенной 6, бортовая ЭВМ 7 получает электронную карту. Далее бортовая ЭВМ 7 составляет массив контрольных точек, определяющих ограничения движения. Для локомотивов Л2, Л3 (фиг.3) это точки кт6, кт2, кт15.
Алгоритм движения на станции показан на примере маневрового локомотива Л2. Локомотив Л2 движется по 5-му пути в нечетном направлении в сторону стрелочного перевода сп36. Система принудительно осуществит прицельное торможение локомотива Л2 около контрольной точки кт6 с помощью исполнительного устройства 15. Маневровый локомотив Л2 с 5-го пути через стрелочные переводы сп25, сп23, сп29 перешел на 2-й путь. Система принудительно осуществит прицельное торможение локомотива Л2 с помощью исполнительного устройства 15 около контрольной точки кт2 при движении в четном направлении и контрольной точки кт15 в нечетном направлении.
После прохождения поезда Л1 диспетчерский центр отменяет действие защитного режима для маршрута следования по пути "1". Сервер 25, используя радиомодем 23 с антенной 24, передает в эфир информацию о том, что путь "1" свободен. Радиомодем 5 с антенной 6 передает эту информацию в бортовую ЭВМ 7. Бортовая ЭВМ 7 отменяет запрет на прохождение локомотивом или локомотивом контрольных точек кт6, кт2, кт15.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2009 |
|
RU2381125C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2008 |
|
RU2388637C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519317C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2492090C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| СИСТЕМА ДЛЯ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2390456C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для предотвращения столкновения подвижного состава или локомотива, в частности при маневровых работах, с поездами, прибывающими на станцию или отправляющимися со станции. Система содержит "N" навигационных спутников, контрольно-корректирующую станцию и локомотивные части. Контрольно-корректирующая станция состоит из приемника спутниковых сигналов, вычислительного блока, радиомодема, сервера, в память которого записана информация о движении поездов и об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, дисплея и передатчика корректирующих сигналов. В состав каждой локомотивной части входят бортовой приемник спутниковых сигналов, приемник корректирующих сигналов, бортовая ЭВМ, в память которой записана информация об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, исполнительное устройство, дисплей, бортовой радиомодем, измеритель тягового тока, датчик направления движения, датчик автосцепки, датчик давления в тормозном цилиндре, датчик давления в тормозной магистрали, датчик пути и скорости, датчик концевого крана локомотива и клавиатура. На контрольно-корректирующей станции вырабатываются дифференциальные поправки координаты станции, информация о которых поступает в локомотивные части. Изобретение позволяет создать надежную систему предотвращения столкновения подвижного состава или локомотива на железнодорожной станции во время маневровых работ при приеме и или отправлении поезда. 3 ил.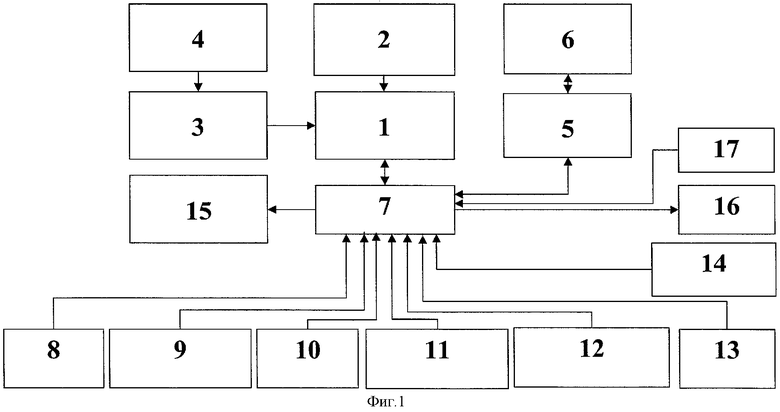
Система предотвращения столкновения подвижного состава или локомотива с прибывающим или отправляющимся со станции поездом, содержащая N навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, приемника спутниковых сигналов и вычислительного блока, первый выход которого подключен к передатчику корректирующих сигналов, соединенному с передающей антенной, К подвижных объектов, на каждом из которых установлены первая приемная антенна, подключенная к первому входу бортового приемника спутниковых сигналов, и вторая приемная антенна, подключенная к приемнику корректирующих сигналов, выход которого соединен со вторым входом бортового приемника спутниковых сигналов, отличающаяся тем, что контрольно-корректирующая станция снабжена сервером, в память которого записана информация о движении поездов и об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, и радиомодемом с антенной, при этом первый и второй входы сервера подключены соответственно ко второму выходу вычислительного блока и выходу радиомодема, а на каждом подвижном объекте установлены бортовая ЭВМ, в память которой записана информация об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, исполнительное устройство и дисплей, соединенные с выходами бортовой ЭВМ, бортовой радиомодем с антенной, измеритель тягового тока, датчик направления движения, датчик автосцепки, датчик давления в тормозном цилиндре, датчик давления в тормозной магистрали, датчик пути и скорости, датчик концевого крана локомотива, клавиатура, при этом выходы бортового радиомодема, бортового приемника спутниковых сигналов, измерителя тягового тока, датчика направления движения, датчика автосцепки, датчика давления в тормозном цилиндре, датчика давления в тормозной магистрали, датчика пути и скорости, датчика концевого крана локомотива и клавиатуры соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым и десятым входами бортовой ЭВМ.
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ И СХОДА С РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2209149C2 |
| Устройство для предотвращения столкновения поездов | 1986 |
|
SU1390110A1 |
| RU 2001807 C1, 30.10.1993. | |||

