Настоящее изобретение относится к турбореактивным двигателям и более точно к устройству оценки массового расхода топлива, впрыскиваемого в камеру сгорания турбореактивного двигателя.
Для авиационных турбореактивных двигателей весьма важной задачей является точное определение массового расхода топлива, впрыскиваемого в камеру сгорания этого турбореактивного двигателя. Оценка массового расхода топлива позволяет рассчитать приведенный (сокращенный) массовый расход топлива, а также степень обогащения смеси воздуха с керосином. При этом, чем более точной оказывается эта оценка, тем более точным является расчет приведенного (сокращенного) массового расхода топлива, а также степени обогащения смеси воздуха с керосином. Поскольку ограничители максимальных и минимальных оборотов двигателя обычно выражаются в функции приведенного массового расхода топлива, недостаточная точность в расчетах массового расхода топлива ухудшает характеристики двигателя. Кроме того, поскольку контроль загрязняющих атмосферу выбросов турбореактивного двигателя требует знания степени обогащения смеси воздуха с керосином в камере сгорания, недостаточная точность в расчетах этой степени обогащения ухудшает качество контроля. В общем случае оценка массового расхода впрыскиваемого в камеру сгорания топлива обеспечивает возможность управления двигателем.
В настоящее время известны два различных способа оценки массового расхода топлива, впрыскиваемого в камеру сгорания. Массовый расход впрыскиваемого в камеру сгорания топлива может быть определен на основе измерения положения дозатора топлива с учетом закона, по которому этот дозатор работает. Однако, поскольку результат измерения представляет собой случайный и ненадежный сигнал, то рассчитанный на его основе массовый расход топлива содержит помехи. Кроме того, закон управления, связывающий положение дозатора с массовым расходом топлива, которое проходит через дозатор, содержит параметрические погрешности. Эти параметрические погрешности связаны, в частности, с изменчивостью плотности и вязкости топлива, с производственными допусками на геометрические характеристики дозатора, с точностью гидромеханического отслеживания дифференциала давления через дозатор и с точностью электромеханического отслеживания положения золотника дозатора.
Массовый расход впрыскиваемого в камеру сгорания топлива также может быть определен на основе измерения массового расхода при помощи классического расходомера. Однако динамика обычного массового расходомера является слишком посредственной, чтобы такой расходомер мог быть использован для контроля и управления двигателем.
Известна система управления двигателем внутреннего сгорания (см., например, патент US 6148601), содержащая по меньшей мере одну топливную форсунку, которая калибрована для управления расходом топлива, подаваемого из источника топлива в камеру сгорания двигателя, следящий клапан, подключенный между источником топлива и калиброванной форсункой, для измерения расхода топлива из источника топлива к форсунке, датчик давления, функционально связанный с топливной форсункой, для измерения падения давления подаваемого топлива через топливную форсунку, и регулятор, функционально связанный с проводником давления и следящим клапаном, для управления расходом топлива через следящий клапан.
Калиброванная форсунка имеет известные характеристики расхода топлива/потери давления. Регулятор регулирует расход топлива посредством следящего клапана в зависимости от потери давления, измеренной датчиком давления, и характеристики расхода топлива/потери давления, известной для топливной форсунки.
Однако динамика указанной системы управления двигателем внутреннего сгорания является слишком посредственной, чтобы она могла быть использована для контроля и управления двигателем.
Техническая задача предлагаемого изобретения состоит в том, чтобы устранить имеющиеся недостатки.
Предлагаемое изобретение относится к устройству определения меры массового расхода текучей среды для камеры сгорания, содержащему дозатор текучей среды и средство определения измеренного (реального) положения дозатора.
Поставленная задача решена путем создания устройства определения меры массового расхода текучей среды для камеры сгорания, содержащего дозатор текучей среды и средство измерения измеренного положения дозатора и характеризующегося тем, что содержит
массовый расходомер для определения измеренного массового расхода текучей среды,
устройство гибридизации для определения фактического массового расхода текучей среды, содержащее
первый вход, содержащий заданную величину WFcons требуемого массового расхода или заданное значение Xcons требуемого положения дозатора,
модуль (26) прогнозирования для определения на основе первого входа и переменных величин состояния, содержащих фактический массовый расход WFréel и параметрические погрешности IP, оценочные величины, содержащие оценочное положение дозатора ^Xdos и оценочную величину массового расхода ^WFdéb,
второй вход, содержащий величину измеренного положения дозатора Xdos и измеренную величину массового расхода текучей среды WFdéb,
вычислитель (30, 22, 20) остатков для определения первого остатка Rdos между измеренным положением дозатора и оценочным положением этого дозатора и второй остаток Rdéb между измеренным массовым расходом текучей среды и оценочным значением массового расхода этой текучей среды,
модуль (24) коррекции для определения на основе упомянутых первого и второго остатков корректирующих сигналов, которые могут быть применены с помощью модуля оценки к переменным величинам состояния WFréel, IP.
Целесообразно, чтобы модуль (26) прогнозирования содержал динамическую модель в состоянии, связывающем первый вход с переменными величинами состояния и оценочными величинами.
Полезно, чтобы модуль (24) коррекции содержал матрицу усиления коррекции, коэффициенты которой являются фиксированными.
Полезно также, чтобы модуль (24) коррекции содержал матрицу усиления коррекции, коэффициенты которой являются переменными.
Предпочтительно, чтобы упомянутые коэффициенты определялись согласно математическому закону, зависящему от массового расхода текучей среды или от положения дозатора.
Выгодно, чтобы матрица усиления коррекции представляла собой матрицу усиления фильтра (К) Калмана, определяемого динамически.
Полезно, чтобы матрица усиления фильтра Калмана определялась динамически путем использования матриц, относящихся к помехам и подвергающихся непрерывной адаптации их коэффициентов.
Предпочтительно, чтобы первый вход дополнительно содержал измеренную величину температуры текучей среды Tcarb.
Полезно, чтобы второй вход содержал измеренную величину дифференциала давления через дозатор текучей среды ^δPmes, оценочные величины содержат оценочную величину этого дифференциала давления δPmes, вычислитель остатков способен определить третий остаток Rδp между измеренной величиной и оценочной величиной дифференциала давления, и модуль коррекции способен определить на основе первого, второго и третьего остатков корректирующие сигналы, которые могут быть применены с помощью модуля оценки к переменным величинам состояния.
Поставленная задача решена также путем создания способа определения меры массового расхода текучей среды для камеры сгорания, содержащего следующие этапы:
a) вводят заданное значение WFcons требуемого массового расхода или заданное значение Xcons требуемого положения дозатора и переменных величин состояния, содержащих фактический массовый расход WFréel и параметрические погрешности IP,
b) определяют на основе этапа а) оценочные величины, содержащие оценочное положение дозатора текучей среды ^Xdos и оценочный массовый расход ^WFdéb текучей среды,
c) измеряют величину массового расхода текучей среды WFdéb на основе данных массового расходомера и положения дозатора текучей среды Xdos,
d) вычисляют первый остаток Rdos между измеренным положением дозатора и оценочным положением этого дозатора и второй остаток Rdéb между измеренным массовым расходом текучей среды и оценочным массовым расходом текучей среды,
e) вычисляют на основе упомянутых первого и второго остатков корректирующие сигналы и их применение к переменным величинам состояния WFréel, IP.
Полезно, чтобы на этапе b) использовали динамическую модель в состоянии, связывающем заданную величину с переменными величинами состояния и оценочными величинами.
Предпочтительно, чтобы при вычислении на этапе е) использовали матрицу усиления коррекции, коэффициенты которой являются фиксированными.
Выгодно, чтобы при вычислении на этапе е) использовали матрицу усиления коррекции, коэффициенты которой являются переменными.
Полезно, чтобы на этапе е) определяли упомянутые коэффициенты на основе математического закона, зависящего от массового расхода текучей среды или от положения дозатора.
Целесообразно, чтобы матрица усиления коррекции на этапе е) представляла собой матрицу усиления фильтра Калмана (К), определяемую динамически.
Предпочтительно, чтобы матрица усиления фильтра Калмана на этапе е) определялась динамически путем использования матриц, относящихся к помехам и подвергающихся непрерывной адаптации их коэффициентов.
Полезно, чтобы на этапе а) дополнительно осуществляли введение измеренного значения температуры текучей среды Tcarb.
Целесообразно, чтобы на этапе b) дополнительно определяли оценочную величину дифференциала давления через дозатор текучей среды ^δPmes, на этапе с) дополнительно измеряют этот дифференциал давления δPmes, на этапе d) дополнительно вычисляют третий остаток Rδp между измеренной величиной и оценочной величиной дифференциала давления и на этапе е) дополнительно вычисляют на основе упомянутых первого и второго остатков корректирующие сигналы и приложение этих корректирующих сигналов к переменным величинам состояния.
Изобретение в дальнейшем поясняется описанием предпочтительных вариантов реализации со ссылками на чертежи, на которых:
Фиг.1 - схематический вид турбореактивного двигателя в разрезе по оси его вращения согласно изобретению;
Фиг.2 - устройство измерения массового расхода текучей среды согласно изобретению;
Фиг.3 - схема устройства гибридизации, входящего в состав устройства измерения, согласно изобретению;
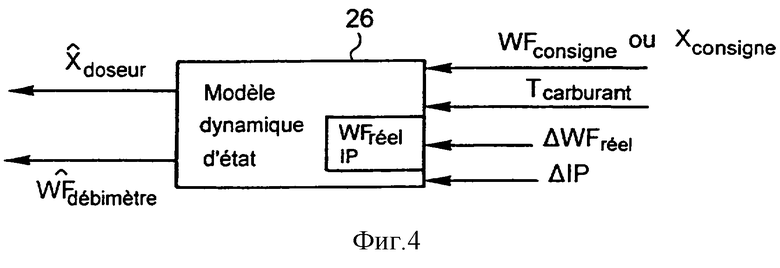
Фиг.4 - схема устройства гибридизации в соответствии с первым вариантом реализации предлагаемого изобретения;
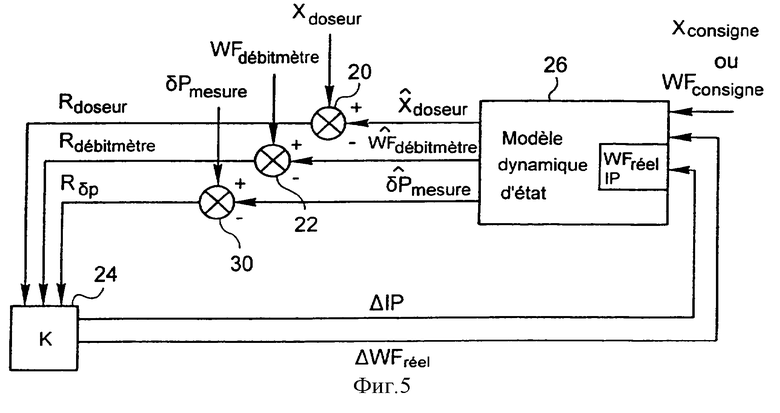
Фиг.5 - схема устройства гибридизации в соответствии со вторым вариантом реализации предлагаемого изобретения;
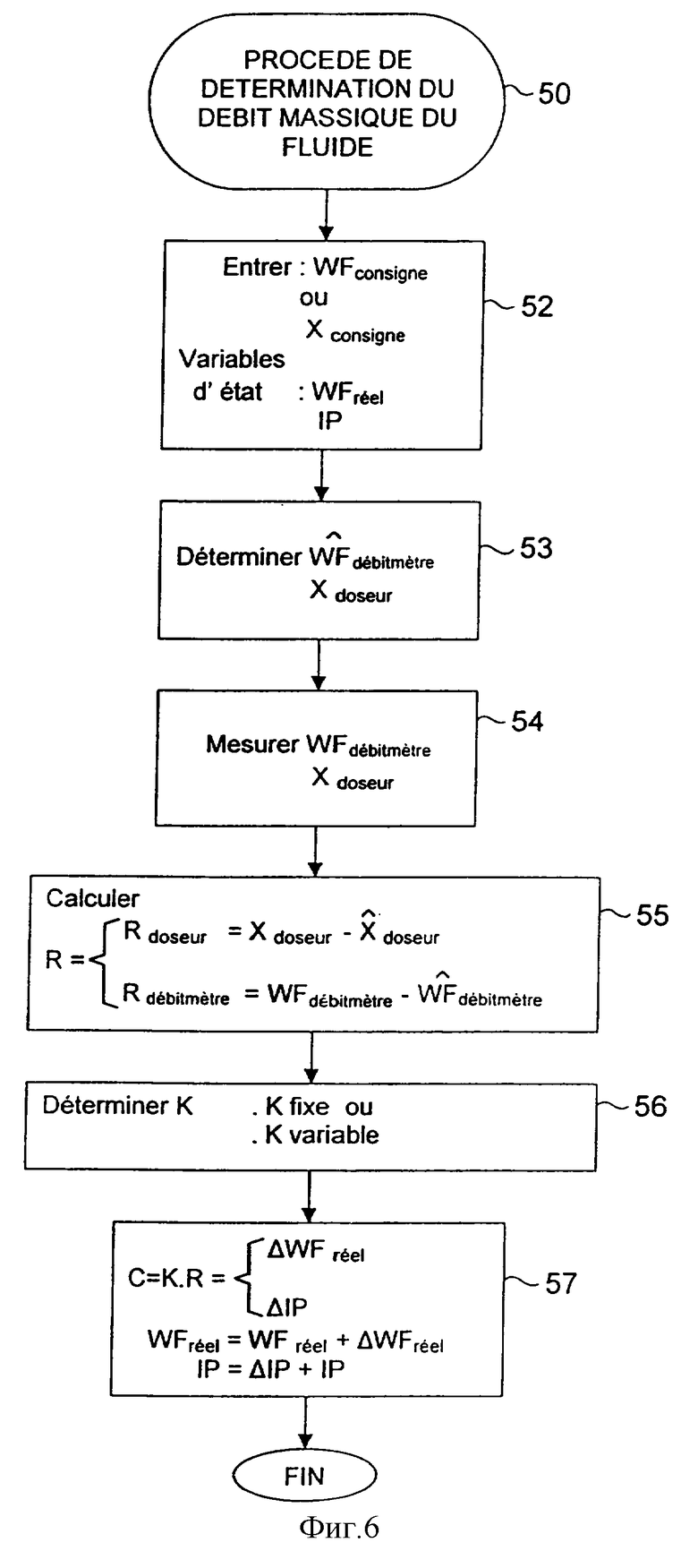
Фиг.6 - схема алгоритма способа определения массового расхода текучей среды в соответствии с предлагаемым изобретением.
Приложение А содержит различные математические уравнения, используемые в соответствии с предлагаемым изобретением, для оценки массового расхода топлива, а также обозначения и наименования используемых параметров состояния.
На фиг.1 схематически представлен турбореактивный двигатель в разрезе по оси вращения А. Различные части турбореактивного двигателя отделены друг от друга пунктирными линиями. Турбореактивный двигатель содержит входную часть 1 для потока воздуха, вслед за которой располагается компрессор 2 для сжатие поступающего воздуха, камеру 3 сгорания, в которую впрыскивается керосин, смешивающийся с потоком сжатого воздуха, поступающего из компрессора, турбину 4 и реактивное сопло 5. Турбореактивный двигатель может содержать и другие камеры сгорания, например форсажную камеру (не показана). В последующем изложении термин "камера сгорания" будет использоваться неограничительным образом по отношению к типу камеры сгорания.
В указанном турбореактивном двигателе важно знать массовый расход топлива, впрыскиваемого в камеру сгорания. Оценка массового расхода впрыскиваемого топлива позволяет рассчитать приведенный (сокращенный) массовый расход топлива, а также степень обогащения смеси керосина с воздухом. При этом, чем более точной является оценка массового расхода топлива, тем более точным оказывается расчет приведенного массового расхода топлива, а также степень обогащения смеси керосина с воздухом. Поскольку положение ограничителей максимальных и минимальных оборотов двигателя обычно выражается в функции приведенного массового расхода топлива, недостаточная точность в расчете массового расхода ухудшает характеристики данного двигателя. Кроме того, поскольку контроль загрязняющих атмосферу выбросов турбореактивного двигателя требует знания степени обогащения смеси воздуха с керосином в камере сгорания, недостаточная точность в расчете степени обогащения приводит к снижению качества контроля. В общем случае оценка массового расхода впрыскиваемого в камеру сгорания топлива позволяет обеспечить управление двигателем.
Как указано выше, в настоящее время известны два способа оценки массового расхода топлива, впрыскиваемого в камеру сгорания. Однако ни одно из этих оценочных определений массового расхода топлива не является вполне удовлетворительным с точки зрения точности или динамических характеристик.
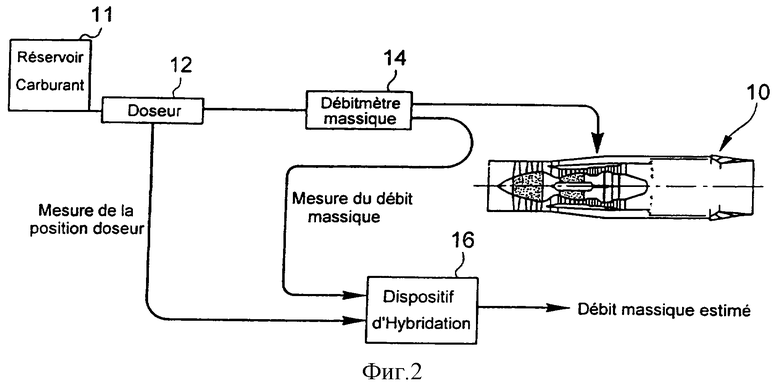
На фиг.2 представлено устройство для определения меры массового расхода текучей среды, в частности топлива, в соответствии с предлагаемым изобретением. Топливный резервуар 11 обеспечивает питание камеры сгорания турбореактивного двигателя 10 топливом. Подача топлива регулируется дозатором 12, содержащим золотник. Дозатор содержит средство измерения положения золотника. В последующей части описания предлагаемого изобретения положение золотника дозатора называется также положением дозатора. Массовый расходомер 14 позволяет обеспечить непосредственное измерение массового расхода топлива перед его впрыскиванием в камеру 3 сгорания турбореактивного двигателя 10. Измерение положения дозатора Xdos и непосредственное измерение массового расхода топлива WFpac принимаются на входе при помощи устройства 16 гибридизации, позволяющего достаточно точным образом определись массовый расход топлива, впрыскиваемого в камеру сгорания. Массовый расходомер 14 может располагаться либо спереди по потоку, либо сзади по потоку от дозатора 12 по отношению к распределению топлива в камере сгорания.
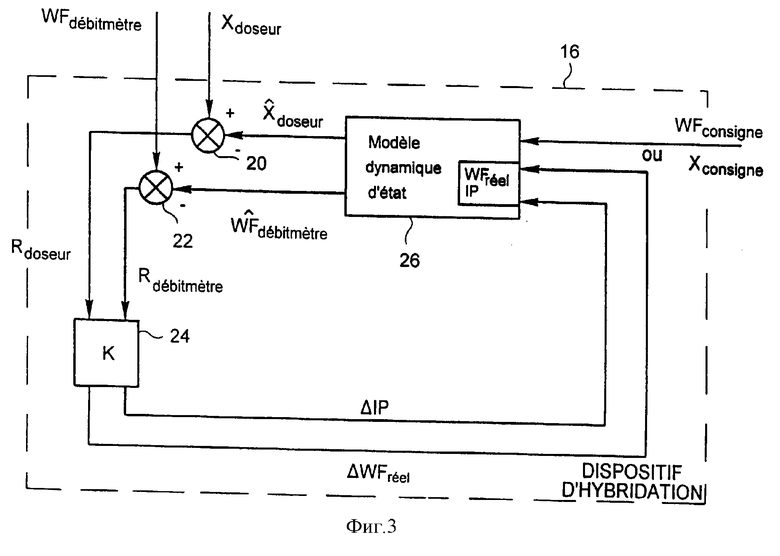
Устройство 16 гибридизации более подробно представлено на фиг.3.
Устройство 16 гибридизации содержит первый вход U (см. приложение А10), представляющий заданную величину WFcons требуемого массового расхода топлива или Xcons требуемого положения дозатора. Устройство гибридизации также содержит модуль 26 прогнозирования, позволяющий определить на основе сигнала на входе U выходной сигнал У (см. приложение А9), содержащий оценочное положение дозатора ^Xdos и оценочный массовый расход ^WFdéb. Определение осуществляется при помощи модели динамического состояния, содержащей в качестве переменных величин состояния в форме вектора состояния Z фактический массовый расход WFréel и вектор параметрических погрешностей IP произвольного размера. Такие параметрические погрешности содержат погрешности, присущие соотношению, связывающему положение дозатора с массовым расходом текучей среды, проходящим через этот дозатор. Параметрические погрешности вводятся при помощи следующих коэффициентов:
изменчивость плотности и вязкости топлива, в основном присущая производственным процессам фракционной перегонки нефти, но зависящая также и от его температуры;
производственные допуски на геометрические характеристики:
элементов контура подачи топлива, в частности производственные допуски на геометрические характеристики дозатора;
точность и качество гидромеханического отслеживания дифференциала давления через дозатор;
точность электромеханического отслеживания положения золотника дозатора.
Модуль прогнозирования может содержать модель динамического состояния, как указано в приложении A11. Модуль прогнозирования позволяет методом итерации рассчитать выходные сигналы Y в функции переменных величин состояния, которые сами в свою очередь представляют собой функцию входных сигналов U. Эта модель может представлять собой линейную модель первого порядка, в которой:
вектор переменных величин состояния Z в своей (n+1) итерации зависит от вектора переменных величин состояния Z в n итерации, от вектора входа U в его n итерации и от матрицы состояния F;
вектор выхода Y в своей итерации (n+1) зависит от вектора переменных величин состояния Z в n итерации и от матрицы выхода Н.
В более общем смысле динамическая модель состояния может быть стационарной в том случае, когда матрицы F и Н являются фиксированными, и может быть нестационарной в том случае, когда эти матрицы F и Н зависят от таких входов, как WFcons или Xcons в примере, приведенном в приложении A11.
Измерение положения дозатора Xdos и измерение массового расхода текучей среды WFdéb, осуществляемые соответственно при помощи средства измерения положения дозатора и массового расходомера, принимаются на входе устройства гибридизации. Вычислитель 20, 22 остатков позволяет определить разность между измеренным массовым расходом текучей среды ^WFdéb и оценочным массовым расходом текучей среды ^WFdéb, причем эту разность называют остатком расходомера Rdéb, как указано в приложении и А2. Вычислитель остатка позволяет также определить второй остаток между измеренным положением дозатора ^Xdos и оценочным положением этого дозатора ^Xdos, причем эта разность называется остатком дозатора, как указано в приложении А1. Таким образом, остаточный вектор оказывается таким, как он определен в приложении А6.
Устройство гибридизации также содержит модуль 24 коррекции, который позволяет обеспечить вычисление на основе остаточного вектора R, описанного в приложении A3, вектора коррекции С, содержащего корректирующий сигнал ΔWFréel и корректирующий сигнал ΔIP, причем последний сигнал соответствует вектору коррекции вектора IP параметрических погрешностей. Вектор С коррекции представляет собой результат умножения матрицы усиления коррекции К, коэффициенты которой могут быть переменными или фиксированными. Вычисление вектора С коррекции в соответствии с приложением A3 позволяет обеспечить коррекцию переменных величин состояния, соответствующих фактическому массовому расходу WFréel и параметрическим погрешностям IP (вектор параметрических погрешностей), как определено в приложениях А4 и А5. Таким образом, перед каждым итеративным вычислением оценочной величины при помощи модуля прогнозирования 26 переменные величины состояния корректируются при помощи вектора С коррекции.
Предпочтительным образом сочетание измерений, выполненных при помощи дозатора и массового расходомера, и соответствующей обработки результатов этих измерений при помощи устройства гибридизации позволяет получить достаточно точные оценочные величины массового расхода топлива в соответствии с динамическими характеристиками, адаптированными для управления двигателем. Предпочтительным образом обработка результатов измерений осуществляется итеративным способом так, чтобы повысить точность полученного результата измерения массового расхода топлива.
Другие варианты реализации, возможные в соответствии с предлагаемым изобретением, подробно представлены на фиг.4 и 5. На фиг.4 более детально представлено усовершенствование модуля 26 прогнозирования (фиг.3). Модуль прогнозирования содержит дополнительный вход, соответствующий измерению температуры топлива. Измерение осуществляется при помощи известных средств измерения температуры. Знание температуры топлива позволяет понизить чувствительность параметрических погрешностей IP, используемых в модуле 26 прогнозирования, по отношению к изменениям этой самой температуры.
На фиг.5 схематически представлено устройство гибридизации, выполненное в соответствии с третьим вариантом реализации. Выходы модуля 26 прогнозирования содержат, в дополнение к оценочному положению дозатора и оценочному массовому расходу топлива, оценочную величину дифференциала давления через дозатор ^δPmes. Получение этой оценочной величины при помощи модуля 26 прогнозирования более подробно описано ниже. Также осуществляется измерение дифференциала давления через дозатор текучей среды, которое затем передается в устройство 16 гибридизации. Вычислитель 20, 22, 30 остатков позволяет определить разность между измеренным дифференциалом давления и оценочным дифференциалом этого давления, причем эту разность называют остатком дифференциала давления Rδp. При этом вектор R остатка содержит, в дополнение к составляющим, определяемым в приложении А6, остаток дифференциала давления Rδp. Корректирующие сигналы AWFréel и ΔIP вычисляются после умножения матрицы К усиления коррекции и вектора R остатка.
Реализация, представленная на фиг.3, может содержать различные варианты, представленные на фиг.4 и фиг.5.
Чтобы получить оптимальную оценку величины массового расхода топлива, матрица К усиления коррекции также может соответствовать усилению фильтра Калмана. Коэффициенты матрицы при этом являются переменными в каждой новой итерации n изменения массового расхода топлива. В приложении А7 подробно представлен рекурсивный фильтр Калмана, обозначения переменных этого фильтра указаны в приложении. В частности, используют матрицы ковариантности помех состояния Q и ковариантности помех измерения R. В приложении А8 вектор Z состояния фильтра содержит в качестве составляющей переменные величины состояния модуля 26 прогнозирования. В приложении А9 вектор Y оценочных выходов модуля 26 прогнозирования содержит в качестве составляющие оценочное положение дозатора ^Xdos и оценочный массовый расход ^WFdéb. В соответствии с предлагаемым изобретением он также может содержать оценочную величину дифференциала давления через дозатор топлива ^δPmes. В приложении А10 вектор U входа содержит заданную величину требуемого массового расхода WFcons или требуемое положение дозатора Xdos.
Известно, что точность массового расходомера представляет собой функцию расхода, который проходит через расходомер. В общем случае точность является более высокой при относительно большом расходе, чем при относительно малом расходе. Таким образом, модуль 24 коррекции способен непосредственно или косвенно адаптировать коэффициенты матрицы К усиления коррекции в функции величины массового расхода, измеренной используемым в данном случае массовым расходомером. Таким образом, модуль коррекции способен модифицировать коэффициенты матрицы усиления коррекции, чтобы придать переменную относительную значимость между измерением положения дозатора Xdos и измерением массового расходомера WFdéb в расчете оценки фактического массового расхода WFréel. Можно также определить непрерывную адаптацию модуля 24 коррекции во всем диапазоне функционирования по расходу топлива. Адаптация коэффициента К усиления может быть реализована при помощи некоторого математического закона или при помощи модификации матриц Q и R ковариантности.
На фиг.6 представлен алгоритм способа определения массового расхода топлива, реализованный при помощи устройства оценки массового расхода топлива.
На этапе 52 заданная величина требуемого массового расход топлива или заданная величина требуемого положения дозатора принимается на входе устройства гибридизации. В модуле прогнозирования использована модель, основанная на переменных величинах состояния фактического массового расхода и параметрических погрешностей, для определения на основе заданной величины требуемого массового расхода WFcons или требуемого положения дозатора Xdos, оценочного положения дозатора ^Xdos, оценочного массового расхода ^WFdéb на этапе 53. На этапе 54 величины массового расхода топлива и положения дозаторе измеряются и принимаются на входе при помощи устройства гибридизации, чтобы вычислить на этапе 55 вектор остатка, содержащий остаток дозатора и остаток расходомера. На этапе 56 определяется матрица К усиления коррекции. Коэффициенты матрицы могут быть фиксированными или переменными. В последнем случае матрица К может быть вычислена посредством функции, которая представляет собой функцию заданного массового расхода WFcons, измеренного массового расхода WFdéb или фактического массового расхода WFréel, или функцию заданного положения дозатора Xcons, измеренного положения дозатора Xdos или фактического положения дозатора Xréel. Матрица К также может быть рассчитана на основе рекурсивных соотношений, приведенных в приложении А7. На основе вектора остатка и матрицы К усиления коррекции вектор С коррекции рассчитывается на этапе 57, причем эти корректирующие сигналы применяются к фактическому массовому расходу WFréel и к параметрическим погрешностям IP на этапе 57. Таким образом, способ может быть снова начат с этапа 52, чтобы уточнить определение фактического массового расхода WFréel. По мере осуществления последовательных итераций этого способа все переменные данные пересчитываются и уточняются, например пересчитываются и уточняются параметрические погрешности, которые позволяют более точно определить оценочные величины массового расхода топлива и положения дозатора, которое вполне сопоставимы с измеренными величинами, как было указано выше.
Предлагаемое изобретение не ограничивается описанными выше только в качестве иллюстративных примеров способами его реализации, но охватывает все возможные варианты его реализации, которые могут быть рассмотрены специалистом в данной области техники в рамках приведенной формулы изобретения.
Приложение А
А1 - 
А2 - 
А3 - С=K×R 
A4 - WFreel=WFreel+ΔWFreel
A5 - IP=IP+ΔIP
A6 - 
A7 -
Pn+1/n=F.Pn/n.FT+Q
Kn+1=Pn+1/n.HT(H.Pn+1/n.HT+R)-1
Pn+1/n+1=Pn+1/n-Kn+1.H.Pn+1/n
А10 - U=[WFconsigne или Xconsigne]
A11 - 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОРОГОВОГО ЗНАЧЕНИЯ РАСХОДА ТОПЛИВА | 2013 |
|
RU2635861C2 |
| СПОСОБ И СИСТЕМА ОЦЕНКИ РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 2015 |
|
RU2690080C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА КОНТУРА ОБРАТНОЙ СВЯЗИ ПРИВОДНОЙ СИСТЕМЫ ПЕРЕМЕННЫХ ГЕОМЕТРИЙ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2580194C2 |
| СПОСОБ И УСТРОЙСТВО ГЕНЕРИРОВАНИЯ КОМАНДЫ РАСХОДА ТОПЛИВА ДЛЯ ВПРЫСКА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2654552C2 |
| СПОСОБ ОЦЕНКИ ВНЕШНЕЙ СИЛЫ, ДЕЙСТВУЮЩЕЙ НА ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2709707C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2008 |
|
RU2484431C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2008 |
|
RU2497084C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА УСТАНОВОЧНОЙ ТОЧКИ | 2011 |
|
RU2555429C2 |
| МУЛЬТИФАЗНОЕ ИЗМЕРЕНИЕ | 2011 |
|
RU2541376C2 |
Изобретение предназначено для турбореактивных двигателей и относится к устройству определения меры массового расхода текучей среды для камеры сгорания, которое содержит дозатор текучей среды и средство измерения измеренного положения дозатора. Устройство содержит также массовый расходомер, устройство гибридизации для определения фактического массового расхода текучей среды, содержащее первый вход, содержащий некоторую заданную величину WFcons, Xcons, модуль прогнозирования для определения на основе упомянутого первого входа и переменных величин состояния, содержащих фактический массовый расход WFréel и параметрические погрешности IP, оценочные величины ^WFdéb ^Xdos, второй вход, содержащий величину измеренного положения дозатора Xdos и измеренную величину массового расхода текучей среды WFdéb, вычислитель остатков для определения остатка Rdos между измеренным положением дозатора и оценочным положением этого дозатора и остатка Rdéb между измеренным массовым расходом текучей среды и оценочным значением массового расхода этой текучей среды, модуль коррекции для определения на основе первого и второго остатков корректирующих сигналов, предназначенных для применения к переменным величинам состояния WFréel, IP. Такое выполнение устройства позволит повысить его точность. 2 н. и 16 з.п. ф-лы, 6 ил.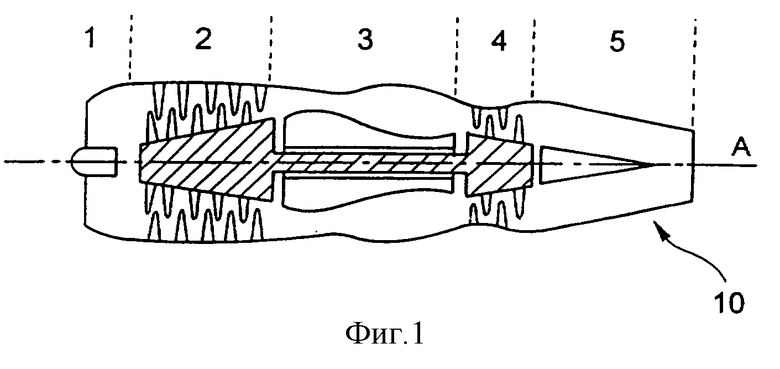
массовый расходомер для определения измеренного массового расхода текучей среды,
устройство гибридизации для определения фактического массового расхода текучей среды, содержащее
первый вход, содержащий заданную величину WFcons требуемого массового расхода или заданное значение Xcons требуемого положения дозатора,
модуль (26) прогнозирования для определения на основе первого входа и переменных величин состояния, содержащих фактический массовый расход WFréel и параметрические погрешности IP, оценочные величины, содержащие оценочное положение дозатора ^Xdos и оценочную величину массового расхода ^WFdéb,
второй вход, содержащий величину измеренного положения дозатора Xdos и измеренную величину массового расхода текучей среды WFdéb,
вычислитель (30, 22, 20) остатков для определения первого остатка Rdos между измеренным положением дозатора и оценочным положением этого дозатора и второй остаток Rdéb между измеренным массовым расходом текучей среды и оценочным значением массового расхода этой текучей среды,
модуль (24) коррекции для определения на основе упомянутых первого и второго остатков корректирующих сигналов, которые могут быть применены с помощью модуля оценки к переменным величинам состояния WFréel, IP.
a) вводят заданное значение WFcons требуемого массового расхода или заданное значение Xcons требуемого положения дозатора и переменных величин состояния, содержащих фактический массовый расход WFréel и параметрические погрешности IP,
b) определяют на основе этапа а) оценочные величины, содержащие оценочное положение дозатора текучей среды ^Xdos и оценочный массовый расход ^WFdéb текучей среды,
c) измеряют величину массового расхода текучей среды WFdéb на основе данных массового расходомера и положения дозатора текучей среды Xdos,
d) вычисляют первый остаток Rdos между измеренным положением дозатора и оценочным положением этого дозатора и второй остаток Rdéb между измеренным массовым расходом текучей среды и оценочным массовым расходом текучей среды,
e) вычисляют на основе упомянутых первого и второго остатков корректирующие сигналы и их применение к переменным величинам состояния WFréel, IP.
| US 6148601 А, 21.11.2000 | |||
| US 5303541 A, 19.04.1994 | |||
| Устройство для исследования характеристикгАзОТуРбиННыХ дВигАТЕлЕй | 1978 |
|
SU805327A1 |
| Способ автоматического регулирования многовального газотурбинного двигателя с керамическими элементами | 1990 |
|
SU1816880A1 |
| Стенд для испытания регуляторов расхода турбореактивного двигателя | 1979 |
|
SU924536A1 |
| МАССОВЫЙ РАСХОДОМЕР ГАЗОЖИДКОСТНОГО ПОТОКА | 2000 |
|
RU2178871C1 |
| US 4593523 А, 10.06.1986 | |||
| ПРОТИВОУГОННОЕ УСТРОЙСТВО СОЛОВЬЕВА В.А. ДЛЯ АВТОМАШИН | 1993 |
|
RU2077434C1 |

