Область техники
Настоящее изобретение относится к способу оценки расхода текучей среды, поступающей из бака, и, в частности, предназначено для повышения надежности такого способа. Оно относится также к системе, позволяющей применять этот способ.
Уровень техники
Известен способ оценки расхода текучей среды, поступающей из бака, включающий в себя измерение уровня текучей среды в баке. В простых случаях, например, при предположении, что существует постоянная возможность измерения уровня, когда бак имеет цилиндрическую форму и когда не происходит скапливания текучей среды между выходом бака и точкой оценки расхода, расход текучей среды можно оценить достаточно достоверно при помощи простой линейной функции.
Однако на практике измерение уровня текучей среды редко может быть доступно постоянно, что требует интерполяций или оценочных функций во время периодов, когда измерение уровня недоступно. При этом могут появляться ошибки или систематические погрешности, связанные с измерением уровня и/или с используемыми оценочными функциями. Кроме того, бак может иметь не цилиндрическую форму, что приводит к нелинейности в оценочной функции. Поэтому существует потребность в новом способе оценки расхода.
Сущность изобретения
Настоящим изобретением предложен способ оценки расхода текучей среды, поступающей из бака, содержащий измерение уровня текучей среды в баке и отличающийся тем, что содержит этап расчета расхода текучей среды при помощи сигма-точечного фильтра Калмана, при этом указанный этап расчета содержит этап получения грубого расхода текучей среды, а также, если измерение уровня доступно, этап коррекции, во время которого полученный грубый расход корректируют в зависимости от измерения уровня.
Фильтр Калмана представляет собой метод вычисления, который можно применять на компьютере и который позволяет оценивать состояния динамической системы на основании ряда неполных или зашумленных входных данных. Фильтр Калмана моделируют при помощи уравнения состояния (1), которое выражает изменение динамической системы, и уравнения измерения (2), которое выражает отношение между измеряемыми наблюдаемыми величинами и собственным состоянием системы. Этими уравнениями являются уравнения типа:
где k является текущим моментом, k+1 является следующим моментом, x является состоянием (собственным) системы, u представляет собой входные данные, y является измеряемой (наблюдаемой) величиной, f является функцией состояния, h является функцией измерения, и v и w являются шумами (соответственно шумом измерения и шумом состояния). Переменные x, y, u, v, w могут быть векторами с одной или несколькими составляющими. Для применения фильтра Калмана в рамках заявленного способа состояние x содержит расход текучей среды, который наблюдают при помощи измерения y, которое содержит, например, уровень текучей среды в баке. Входные данные u содержат, например, параметры системы, такие как скорость насоса и/или давление текучей среды в одном или нескольких положениях контура текучей среды. Входные данные u можно рассчитать на основании измерений, отличных от y, или они могут быть данными работы системы.
Фильтр Калмана включает в себя этап получения значения состояния (k+1) в зависимости от текущего состояния (k) на основании входных данных uk и этап коррекции значения, полученного на основании измерения yk. Эти этапы широко известны в литературе, и их описание для общего случая опускается.
Сигма-точечный фильтр Калмана (или непахучий фильтр Калмана от английского "unscented Kalman filter", в дальнейшем UKF), описанный в "A new extension of the Kalman filter to nonlinear systems" (Julier and Uhlmann, in the 11th International symposium on Aerospace/Defence sensing, simulation and control, Vol. multi sensor fusion, tacking and resource management II, Orlando, Florida, 1997), является вариантом фильтра Калмана, наиболее адаптированным для нелинейных систем, примером которых может быть расход текучей среды в зависимости от уровня в баке, откуда поступает текучая среда. Кроме этапов фильтра Калмана, сигма-точечный фильтр Калмана содержит этап, называемый «сигма-точечным (непахучим) преобразованием», которое состоит в аппроксимации текущего состояния xk по случайной гауссовой переменной, выраженной в виде совокупности выбранных надлежащим образом точек, называемых сигма-точками. Эта совокупность точек точно отображает среднюю величину и ковариацию случайной гауссовой переменной. Во время этапа получения уравнение состояния (1) применяют к каждому из параметров, чтобы получить следующее состояние. В результате получают совокупность сигма-точек в момент k+1, которая отображает среднюю величину и ковариацию следующего состояния Xk+1 с точностью, достигающей второго порядка (в рамках разложения в ряд Тейлора). С другой стороны, расширенный фильтр Калмана, который представляет собой другой вариант фильтра Калмана, применяемого для нелинейных систем, не достигает точности первого порядка. Кроме того, в отличие от расширенного фильтра Калмана, UKF не требует сложного точного вычисления линеаризации (вычисления матриц Гессе и Якоби).
Этап получения состоит в первоначальном, возможно, временном определении расхода, который требуется оценить. Его можно осуществлять посредством измерения, посредством вычисления (в частности, при помощи уравнения состояния (1) UKF) или при помощи комбинации одного и другого. Иначе говоря, состояние x фильтра UKF содержит расход, который необходимо оценить. Затем грубый расход, полученный на этапе получения, проходит через этап коррекции.
Как было указано выше, на этапе коррекции используют результаты этапа измерения. Этап измерения не предполагает, что измерение уровня доступно постоянно: на нем проверяют, доступно ли измерение, и, если это так, производят это измерение. Если в какой-то момент измерение недоступно, на этапе измерения не получают никакой данной для этапа коррекции, и, следовательно, расход, полученный в этот момент, не корректируют.
Способ оценки можно применить для оценки моментального расхода, совокупного расхода или любой величины, вычисленной на основании расхода.
Таким образом, способ оценки обеспечивает оценку расхода текучей среды, которая является точной, согласующейся с измерениями уровня в баке и позволяющей корректировать, благодаря использованию UKF, систематических погрешности и ошибки этапа получения. Кроме того, этот способ совместим с любой формой бака, в частности, с не цилиндрическими баками. Кроме того, благодаря уравнению состояния UKF, этап получения позволяет точно оценивать расход текучей среды, даже когда измерения уровня недоступны. Наконец, этот способ идеально адаптируется к изменениям расхода и к изменениям рабочей точки системы, на которой измеряют расход.
В некоторых вариантах осуществления, грубое значение расхода измеряют при помощи по меньшей мере одного датчика, в частности, расходомера. В этих вариантах осуществления этап получения в основном реализуют при помощи расходомера, а этап коррекции позволяет корректировать расходомер на основании измеренных значений уровня. При использовании расходомера способ оценки позволяет повысить его надежность, осуществлять его переустановку и/или повторную калибровку.
В некоторых вариантах осуществления грубое значение расхода вычисляют путем математического расчета с итеративно оцениваемыми коэффициентами, в частности, при помощи искусственной нейронной сети. При математическом расчете с итеративно оцениваемыми коэффициентами исключают физические измерения и математические выражения, коэффициенты которых являются постоянными и заранее известными. Итеративно оцениваемые коэффициенты можно оценивать путем последовательных адаптации модели к совокупности данных, как это делает искусственная нейронная сеть, или путем конвергенции решения уравнения, решаемого в цифровом выражении.
Искусственная нейронная сеть (RNA) является вычислительной моделью, содержащей один или несколько нейронов, при этом каждый нейрон имеет передаточную функцию. Таким образом, RNA имеет общую передаточную функцию, позволяющую вычислять по меньшей мере один выход в зависимости по меньшей мере от одного входа. Передаточные функции каждого нейрона или относительные веса нейронов в сети можно взвешивать при помощи коэффициентов, называемых синаптическими весами (или просто весами) и систематическими погрешностями. Веса можно модулировать в зависимости от обучения RNA. Обучение состоит во введении в сеть RNA набора ситуаций, в которых входы и выходы известны. В ходе обучения RNA адаптирует синаптические веса и систематические погрешности, чтобы они соответствовали выученным ситуациям, возможно, с некоторым допуском. Таким образом, сети RNA являются математическими выражениями, коэффициенты которых итеративно адаптируют в зависимости от обучения. После определения весов и систематических погрешностей в конце фазы обучения они могут оставаться или не оставаться постоянными во время фазы использования.
Таким образом, сеть RNA может осознанно моделировать систему, обучаясь на основании реального поведения системы и не обязательно зная управляющие ею теоретические правила. Кроме того, сеть RNA обладает способностью обобщения (называемого также «логическим выводом»), то есть может определять выходные значения ситуации, входные данные которой ей были предоставлены, даже если эта ситуация не была заучена в ходе фазы обучения, при условии что входы содержаться в области достоверности (иначе говоря, убеждаются, что значения входов вычисляемой ситуации заключены между или находятся близко к крайним входным значениям, которые послужили для обучения). Это представляет особый интерес для систем, которые имеют широкий диапазон рабочих точек и для которых в промышленном масштабе не представляется возможным специально параметрировать все возможные ситуации. Для повышения точности необходимо проверить, что ситуации обучения образуют достаточно мелкие звенья в сети рабочей области. Наконец, сеть RNA является легко модулируемой системой. Эти преимущества действительны также в случае других математических выражений с итеративно оцениваемыми коэффициентами.
Кроме того, в таких вариантах осуществления изобретения этап получения выполняют путем математического расчета, что позволяет обойтись без расходомера и получить выигрыш в стоимости, в массе и в габарите.
Кроме того, в отличие от некоторых известных систем, для которых используют сигма-точечный фильтр Калмана, настоящий способ использует математическое выражение с итеративно оцениваемыми коэффициентами (в частности, сеть RNA), включая ее в этап получения UKF. Следовательно, работа и конечный результат являются совершенно другими.
В некоторых вариантах осуществления изобретения масса текучей среды в баке является нелинейной функцией уровня текучей среды в баке. В некоторых вариантах осуществления бак не являются цилиндрическим. В некоторых других вариантах осуществления бак является цилиндром, образующие которого не перпендикулярны к среднему уровню текучей среды в баке.
Следует напомнить, что цилиндр является поверхностью, образованной прохождением прямой фиксированного направления, называемой образующей, вдоль замкнутой плоской кривой. Цилиндром называют также усеченный цилиндр, то есть твердое тело, ограниченной цилиндром и двумя параллельными плоскостями, при этом обе плоскости не параллельны образующим цилиндра.
Вышеупомянутые признаки характеризуют форму большинства баков, в частности, баков со сферическим дном. Если бак не является цилиндрическим, скорость опорожнения бака (то есть производная уровня в зависимости от времени) не является линейной функцией выходного расхода бака. Как было указано выше, фильтр UKF как раз учитывает эту нелинейность.
В некоторых вариантах осуществления изобретения состояние сигма-точечного фильтра Калмана включает в себя систематическую погрешность грубого значения расхода. В некоторых вариантах осуществления предполагают, что расход равен сумме грубого расхода, полученного на этапе получения, и систематической погрешности (положительной или отрицательной). В целом, в других вариантах осуществления предполагается, что расход является линейной функцией получаемого грубого расхода, при этом систематическая погрешность является вектором, образованным коэффициентами линейной функции. Тот факт, что состояние фильтра Калмана включает в себя систематическую погрешность, позволяет в дальнейшем выделить и использовать значение систематической погрешности, например, чтобы обнаруживать аномалию, когда значение систематической погрешности переходит определенный порог.
В некоторых вариантах осуществления изобретения состояние сигма-точечного фильтра Калмана включает в себя грубое значение расхода, а также систематическую погрешность этого значения.
В некоторых вариантах осуществления изобретения способ оценки дополнительно содержит этап фильтрации флуктуации уровня текучей среды. Флуктуациями уровня текучей среды называют переходные изменения уровня текучей среды с постоянным объемом текучей среды в баке в отличие от изменений уровня, связанных с расходом. Флуктуации уровня текучей среды могут быть связаны с колебанием текучей среды в баке или с широкополосным шумом сигнала (белый шум, в основном связанный с взаимодействиями бака с его механическим и гидравлическим окружением). Этот этап фильтрации можно осуществлять, например, применяя фильтр нижних частот или предусматривая в UKF подавление собственной моды колебания. Например, можно записать уровень текучей среды в виде выражения, содержащего функцию флуктуации, и определить коэффициенты этой функции флуктуации (например, амплитуды, частоты и фазы основных членов ее разложения в ряд Фурье), включая эти коэффициенты в вектор состояния UKF.
Такой этап фильтрации позволяет подавлять шум измерений уровня и еще больше повысить надежность способа оценки.
Объектом настоящего изобретения является также способ оценки двух расходов текучих сред, поступающих соответственно из первого бака и из второго бака, согласно которому оценивают расходы текучих сред, осуществляя отдельно: первый способ оценки, содержащий этап расчета расходов текучих сред при помощи сигма-точечного фильтра Калмана, при этом на этапе коррекции фильтра Калмана не учитывают никакого измерения уровня; второй вышеупомянутый способ, в котором учитывают только одно измерение уровня первого бака; третий вышеупомянутый способ, в котором учитывают только одно измерение уровня второго бака; четвертый вышеупомянутый способ, в котором учитывают оба измерения уровня; и согласно которому передают расходы, оцененные при помощи того из четырех способов, который учитывает именно доступные измерения и только эти измерения.
В рамках способа ставится задача оценки двух расходов, значения которых корректируют на основании двух измерений уровня. Оба измерения могут быть одновременно доступны, одновременно недоступны, или только одно или другое из двух является доступным. Таким образом, существуют четыре ситуации доступности измерений уровня.
Идея такого способа состоит в оценке двух расходов в соответствии с четырьмя вариантами описанного выше способа, затем в выборе варианта, наиболее соответствующего доступным измерениям уровня. Эти четыре способа различаются в том, что они учитывают частично, полностью или совсем не учитывают измерения уровня, полученные на этапе измерения. Следовательно, каждый из четырех способов можно оптимизировать в зависимости от измерений, которые он может учитывать.
Среди четырех применяемых способов выбирают тот, который учитывает именно доступные измерения, то есть способ, который в рассматриваемый момент учитывает измерения, переданные на этапе измерения, и не учитывает измерения, не переданные на этапе измерения. Таким образом, этот выбор состоит в выборе способа, наиболее подходящего для рассматриваемой ситуации. Выбор среди четырех способов можно осуществлять до, после или во время применения способов. Кроме того, этот способ поддается обобщению для большего числа расходов и/или случаев доступности измерений.
Объектом настоящего изобретения является также система оценки расхода текучей среды, поступающей из бака, содержащая средства измерения, выполненные с возможностью измерения уровня текучей среды в баке и отличающаяся тем, что содержит средства расчета расхода текучей среды при помощи сигма-точечного фильтра Калмана, при этом указанные средства расчета содержат средства получения грубого расхода текучей среды, а также средства коррекции, связанные со средствами получения и со средствами измерения и выполненные с возможностью коррекции грубого расхода, полученного средствами получения, в зависимости от уровня, измеренного средствами измерения. Такую систему можно успешно применять для осуществления описанного выше способа.
Объектом настоящего изобретения является также двигательная установка, в частности, для космической ракеты-носителя, содержащая два бака, в каждом из которых находится компонент ракетного топлива, камеру сгорания, в которую нагнетают оба компонента ракетного топлива, и описанную выше систему оценки расхода по меньшей мере одного из компонентов ракетного топлива. Для двигательной установки очень важно правильно оценивать расход ракетного топлива. Кроме того, в качестве выигрыша можно также указать уменьшение массы и габарита, связанные с отказом от использования расходомеров.
Если такая двигательная установка содержит систему оценки обоих расходов или систему оценки каждого из расходов, можно вычислять соотношение компонентов ракетного топлива в смеси, которое является соотношением расхода компонентов ракетного топлива на входе камеры сгорания. Соотношение для двух компонентов ракетного топлива в смеси является важным параметром для управления двигательной установкой.
Объектом настоящего изобретения является также компьютерная программа, содержащая команды для осуществления этапов способа оценки согласно любому из описанных выше вариантов осуществления способа, когда указанную программу исполняет компьютер.
В частном варианте осуществления изобретения различные этапы способа оценки определены командами компьютерных программ.
Эта программа может использовать любой язык программирования и может быть в виде кода источника, кода объекта или промежуточного кода между кодом источника и кодом объекта, например, в частично компилированном виде или в любом необходимом виде.
Объектом изобретения является также носитель информации, считываемый компьютером и содержащий записанную компьютерную программу с командами для осуществления этапов способа оценки согласно любому из описанных выше вариантов осуществления способа.
Носитель информации может быть любым устройством, выполненным с возможностью хранения программы. Например, носитель может содержать средство хранения, такое как ROM, например, CD ROM или ROM микроэлектронной схемы, или магнитное средство записи, например, такое как дискета (floppy disc) или жесткий диск.
С другой стороны, носитель информации может быть передаваемым носителем, таким как электрический или оптический сигнал, который можно передавать через электрический или оптический кабель, по радио или при помощи других средств. В частности, программу в соответствии с изобретением можно загружать дистанционно из сети типа Интернет.
Краткое описание фигур
Изобретение и его преимущества будут более понятны из нижеследующего подробного описания вариантов осуществления изобретения, представленных в качестве примеров. Это описание представлено со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - двигательная установка, оснащенная системой оценки расхода согласно первому варианту выполнения.
Фиг. 2 - масса ракетного топлива, содержащаяся в баках двигательной установки, показанной на фиг. 1, в зависимости от уровня.
Фиг. 3A и 3B иллюстрируют доступность измерений датчиков уровня баков в зависимости от времени.
Фиг. 4А-4С иллюстрируют применение системы оценки расхода, показанной на фиг. 1.
Фиг. 5 - двигательная установка, оснащенная системой оценки расхода согласно второму варианту выполнения.
Фиг. 6 - контур текучей среды, оснащенный системой оценки расхода согласно третьему варианту выполнения.
Подробное описание изобретения
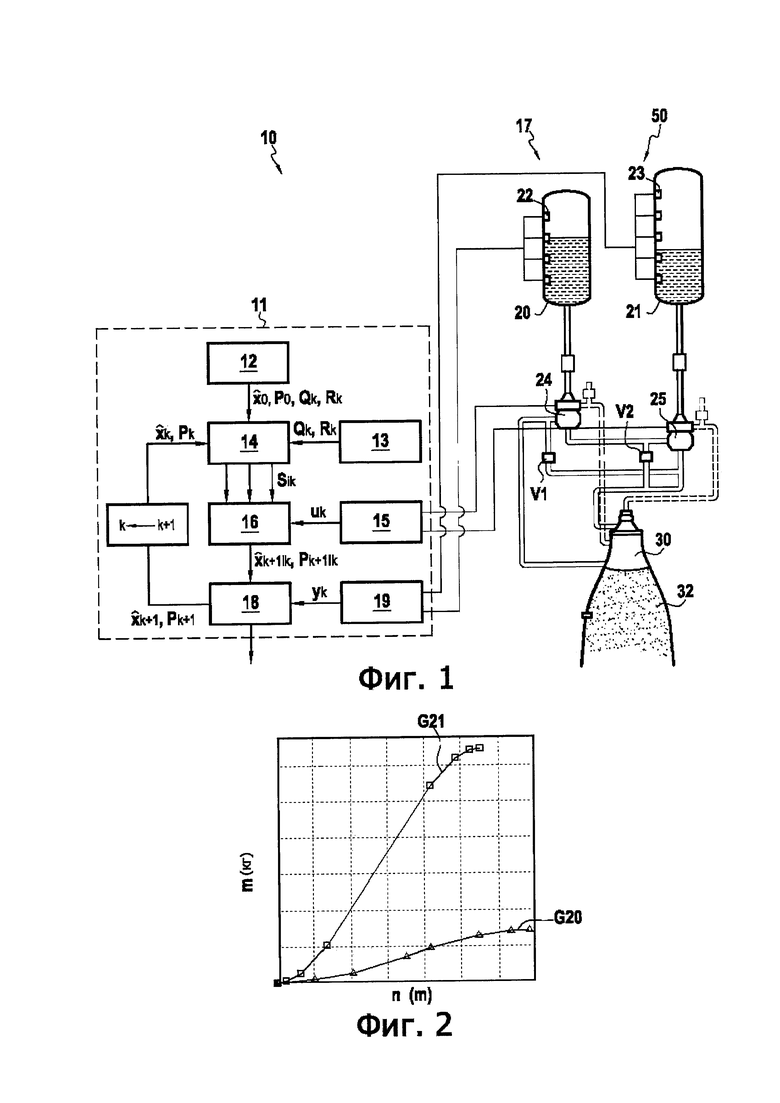
На фиг. 1 показана двигательная установка 50, в частности, для космической ракеты-носителя, содержащая два бака 20, 21, в каждом из которых находится компонент ракетного топлива (например, соответственно жидкий водород и жидкий кислород), камеру 30 сгорания, в которую нагнетают оба компонента ракетного топлива, и систему 10 оценки расходов компонентов ракетного топлива на входе камеры 30 сгорания. Газообразные продукты сгорания развивают тягу во время их прохождения в сопле 32 на выходе камеры 30 сгорания.
В данном случае двигательная установка 50 является установкой с интегрированным потоком, в которой нагретый компонент ракетного топлива (например, водород) вращает турбонасосы 24, 25, после чего нагнетается в камеру 30 сгорания. Две регулирующих вентиля V1, V2 позволяют модулировать расход нагретого компонента ракетного топлива, поступающего в турбины турбонасосов 24, 25, чтобы контролировать расход жидкого компонента ракетного топлива, перекачиваемого турбонасосами 24, 25.
Как показано на фиг. 1, баки 20, 21 являются не цилиндрическими баками. В частности, в представленном примере эти баки имеют сферическое дно. Следовательно, отношение между уровнем ракетного топлива в каждом баке и массой ракетного топлива в указанном баке является нелинейным. Пример такого отношения для данного случае представлен на фиг. 2. Кривая G20 (соответственно кривая G21) характеризует массу m ракетного топлива в баке 20 (соответственно в баке 21) в зависимости от уровня n ракетного топлива в этом баке. Каждая из кривых G20, G21 имеет по существу линейную центральную часть (соответствующую по существу цилиндрическому участку бака). Для самых верхних уровней или для самых нижних уровней кривые являются уплощенными, то есть баки сужаются относительно их центрального участка. Этот вид кривых является характерным для полусферической или аналогичной формы на концах баков. В настоящем случае нелинейность отношения между расходом ракетного топлива на входе камеры 30 сгорания и уровнем ракетного топлива в баках 20, 21 связана не только с формой баков (геометрическая нелинейность), как было указано выше, но также со второй нелинейностью, связанной с выражением расхода в зависимости от рабочих параметров двигательной установки (механическая и термодинамическая нелинейности).
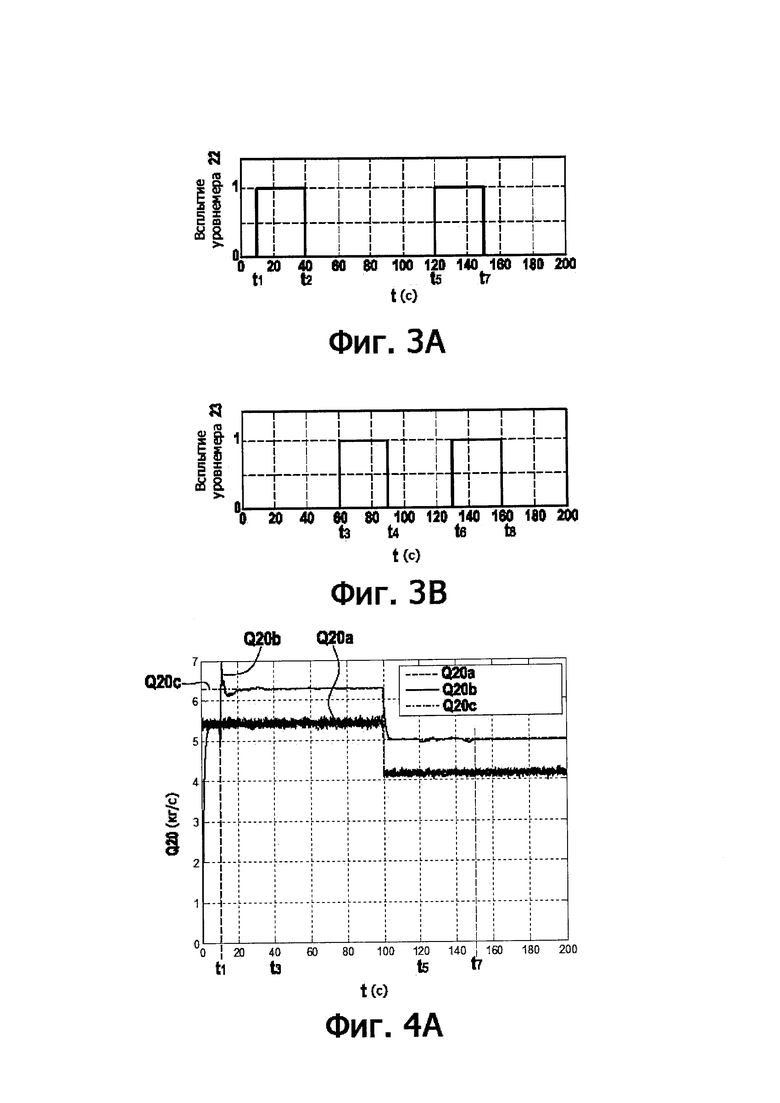
Как показано на фиг. 1, баки 20, 21 снабжены соответствующими уровнемерами 22, 23, предназначенными для измерения уровня в баке. Размер и форма баков, а также конфигурация уровнемеров 22, 23 могут меняться от одного бака к другому. Уровнемеры 22, 23 представляют собой набор датчиков. Эти датчики передают сигнал, который учитывается, только когда они не погружены, то есть когда они по меньшей мере частично находятся над свободной поверхностью содержащегося в баке ракетного топлива. Например, кривые доступности уровнемеров 22, 23 в зависимости от времени t показаны соответственно на фиг. 3A и 3B во время работы двигательной установки 50. Поскольку баки 20, 21 опорожняются с разной скоростью, то, как правило, кривые доступности уровнемеров 22, 23 различаются. Доступность равна 1, когда уровнемер всплывает и может передать измерение; в противном случае доступность равна 0.
Как показано на фиг. 3A, уровнемер 22, состоящий из нескольких секций, находится на стадии всплытия между t1=10c и t2=40c, с одной стороны, и между t5=120c и t7=150c, с другой стороны. В течение остального времени его доступность является нулевой, то есть уровнемер 22 не передает никакого измерения: уровень ракетного топлива находится между двумя последовательными датчиками.
Аналогично, как показано на фиг. 3B, уровнемер 23 находится на стадии всплытия между t3=60c и t4=90c, с одной стороны, и между t6=130c и t8=160c, с другой стороны. В течение остального времени уровнемер 23 недоступен.
Из фиг. 3A и 3B следует, что уровнемеры 22, 23 выдают измерения периодически. Кроме того, периоды доступности уровнемеров 22, 23 не обязательно совпадают. Действительно, первый период всплытия уровнемера 22 между t1 и t2 полностью отличается от первого периода всплытия уровнемера 23 между t3 и t4, тогда как второй период всплытия уровнемера 22 между t5 и t7 перекрывает второй период всплытия уровнемера 23 между t6 и t8 в течение десяти секунд от t6 до t7. Следовательно, измерения, выдаваемые уровнемерами 22, 23, могут быть доступны не одновременно.
Уровнемеры 22, 23 соединены с системой 10 оценки расхода, как показано на фиг. 1. Как было указано выше, система 10 оценки содержит средства 17 измерения, выполненные с возможностью измерять уровень текучей среды в баке. Средства 17 измерения содержат уровнемеры 22, 23 и считывающую плату 19, с которой они соединены.
Система оценки 10 содержит средства расчета расхода каждого компонента ракетного топлива при помощи сигма-точечного фильтра Калмана. Эти средства являются вычислительными средствами, содержащими, в частности, компьютер 11, в состав которого входит считывающая плата 19. В данном случае средства расчета содержат устройство 12 инициализации, устройства 14 преобразования, устройство 16 получения и устройство 18 коррекции. Кроме измерений уровня, поступающих от средств 17 измерения, система 10 оценки использует в качестве входных данных данные о работе двигательной установки 50. Например, она содержит устройство 15 считывания, соединенное с турбонасосами 24, 25 и получающее в качестве данных скорость вращения турбонасосов и давление компонентов ракетного топлива на выходе турбонасосов. Можно также собирать другие данные. Кроме того, устройство 15 считывания может быть соединено с другими составными элементами или местами двигательной установки 50 для считывания других данных. Например, оно может быть также соединено с камерой 30 сгорания для измерения давления газов в камере 30 сгорания.
Сигма-точечный фильтр Калмана является итерационным фильтром, при этом каждую новую оценку рассчитывают на основании предыдущего состояния и текущих данных. Значения, поступающие от устройства 18 коррекции, являются одновременно входными значениями для устройства 14 преобразования, что обеспечивает итеративную работу системы 10 оценки, а также общими выходными значениями. Эти выходные значения можно использовать для разных целей, например, для мониторинга работы двигателя или для регулирования двигателя, в частности, для регулирования открывания обходных вентилей V1, V2 в зависимости от оцениваемых расходов.
На фиг. 1, где k является текущим моментом (или текущей итерацией), показаны следующие обозначения:
- xk является текущим состоянием,  является оценкой его среднего значения, Pk и является его ковариационной матрицей;
является оценкой его среднего значения, Pk и является его ковариационной матрицей;
- Qk и Rk являются соответствующими ковариационными матрицами шума состояния wk и шума измерения vk фильтра Калмана (см. указанные выше уравнения (1) и (2)), которые предположительно известны заранее, учитывая, что шум измерения можно измерить;
- Sik является i-ой сигма-точкой в момент k;
- uk обозначает входные данные;
-  является грубым значением состояния x, полученным в момент k+1, с учетом известности этого его состояния в момент k;
является грубым значением состояния x, полученным в момент k+1, с учетом известности этого его состояния в момент k;
- Рk+1|k является грубой ковариационной матрицей состояния x в момент k+1 при известности ковариационной матрицы Pk;
- yk обозначает измеренные значения, поступающие от средств 17 измерения;
-  является значением состояния x в момент k+1, скорректированным в зависимости от измерений уровня, произведенных средствами 17 измерения, и Pk+1 является его ковариационной матрицей.
является значением состояния x в момент k+1, скорректированным в зависимости от измерений уровня, произведенных средствами 17 измерения, и Pk+1 является его ковариационной матрицей.
Состояние xk сигма-точечного фильтра Калмана, выбранного в настоящем варианте осуществления, содержит уровень ракетного топлива nk, расход qk, рассчитанный сетью RNA, и систематическую погрешность Ek этого расхода. Таким образом, получаем xk=[nk qk Ek]T. Состояние UKP может включать в себя количество уровней, расходов и систематических погрешностей, соответствующее числу расходов, которые необходимо оценить при помощи UKF. В примере, представленном на фиг. 1, величины n, q, E являются векторами, каждый из которых содержит две составляющие, одна из которых относится к компоненту ракетного топлива в баке 20, а другая - к компоненту ракетного топлива в баке 21. Для упрощения, если только не указано иное, нижеследующее описание рассматривает только один расход, но представленные элементы действительны также для случая нескольких расходов.
Устройство 12 инициализации выполнено с возможностью передавать в устройство 14 преобразования первоначальное состояние  , P0, являющееся функцией характеристик двигательной установки 50.
, P0, являющееся функцией характеристик двигательной установки 50.
Устройство 14 преобразования выполнено с возможностью сигма-точечного преобразования UKF в каждый момент k, то есть создания совокупности сигма-точек Sik на основании значения  и ковариационной матрицы Pk, аппроксимирующей текущее состояние xk.
и ковариационной матрицы Pk, аппроксимирующей текущее состояние xk.
Устройство 16 получения выполнено с возможностью осуществления этапа получения в рамках способа оценки. В настоящем варианте осуществления этап получения осуществляет искусственная нейронная сеть. Эта сеть RNA выдает грубые расходы ракетного топлива на входе соответствующих турбонасосов 24, 25, используя в качестве входных данных давление указанного ракетного топлива на выходе насоса, давление газов в камере 30 сгорания и/или скорость вращения указанного турбонасоса. При прочих равных условиях, чем больше имеется входных данных (которые являются к тому же критериями дискриминации ситуаций), тем точнее оценка, выдаваемая сетью RNA. В частности, сеть RNA может быть сетью типа многослойного персептрона, в частности, с одним скрытым слоем для разных наборов входов, разработанного на основании базы данных, которая соответствует картографии, полученной при помощи экспериментальных данных или физических моделей.
Эмпирически установлено, что расход, выдаваемый на выходе RNA, является зашумленным. В этом варианте осуществления для него применяют фильтр нижних частот, в данном случае первого порядка. Обозначив qk расход, полученный устройством 16 получения в момент k, RNAk - функцию, применяемую сетью RNA для входных данных uk, Δt - шаг времени между k и k+1, и T - константу времени фильтра (в данном случае порядка секунды), получаем пример такого фильтра в виде следующего выражения:

Кроме того, предположим, что расход d является суммой грубого расхода q, выдаваемого сетью RNA, и неизвестной систематической погрешности E, положительной или отрицательной, характеризующей влияние ошибок моделирования расхода. Иначе говоря, для каждого компонента ракетного топлива получаем отношение

В других вариантах осуществления уравнение (4) можно обобщить в виде  , где систематическая погрешность E является векторной и может быть применена к расходу в виде линейной функции. В частности, коэффициент
, где систематическая погрешность E является векторной и может быть применена к расходу в виде линейной функции. В частности, коэффициент  позволяет учитывать мультипликативную систематическую погрешность, тогда как коэффициент
позволяет учитывать мультипликативную систематическую погрешность, тогда как коэффициент  позволяет учитывать аддитивную систематическую погрешность. В указанном выше первом примере уравнения (4)
позволяет учитывать аддитивную систематическую погрешность. В указанном выше первом примере уравнения (4)  .
.
Для устройства 16 получения предположим, что систематическая погрешность Е является постоянной; это не мешает систематической погрешности Е подвергаться коррекции устройством 18 коррекции. Это предположение выражается отношением

Для устройство 16 получения возможны другие отношения изменения систематической погрешности Ek, например, систематическая погрешность, пропорциональная тяге двигательной установки 50, или систематическая погрешность, возрастающая в зависимости от квадратичного расстояния относительно номинальной рабочей точки, для которой можно предположить, что систематическая погрешность является наименьшей (поскольку система y является наиболее известной по определению). Таким образом, уравнения (3), (4) и (5) являются уравнениями изменения расхода, опирающимися на сеть RNA, применяемую устройством 16 получения.
Кроме того, устройство 16 получения содержит моделирование изменения уровней nk компонентов ракетного топлива в баках. Если записать, что масса mk ракетного топлива уменьшается с каждым шагом времени Δt на количество Δt×dk и что масса связана с уровнем функциями G20, G21 (см. фиг. 2; в дальнейшем эти функции будут обобщенно обозначены буквой G), для каждого компонента ракетного топлива получаем отношение:

в котором G-1 является функцией, обратной функции G.
Далее более подробно будет описана работа устройства 10 оценки. Устройство 12 инициализации инициализирует первоначальное состояние x0, используя, например, первоначальный уровень заполнения баков, нулевой расход и нулевую систематическую погрешность. Устройство 12 инициализации передает в устройство 14 преобразования значения  . P0, соответствующие первоначальному состоянию. Для этого вычисления предполагается, что состояние x является случайной гауссовой переменной средней величины
. P0, соответствующие первоначальному состоянию. Для этого вычисления предполагается, что состояние x является случайной гауссовой переменной средней величины  и ковариации P.
и ковариации P.
При каждой итерации k устройство 14 преобразования вычисляет расширенный вектор состояния Xk=[xk vk wk]T. Его ковариационная матрица Pxk является поблочной диагональной матрицей, образованной соответствующими ковариационными матрицами Pk, Qk, Rk. Ковариационные матрицы Qk, Rk получены эмпирическим путем и сохранены в памяти 13. Альтернативно или дополнительно ковариации измерения Rk могут быть вычислены автоматически путем расчетов вариаций измерительных шумов vk в скользящем временном окне.
Устройство 14 преобразования генерирует совокупность сигма-точек, соответствующую случайной гауссовой переменной  , Pxk, аппроксимирующей текущее состояние Xk. Сигма-точки Sik генерируют в соответствии с классическим методом сигма-точечного фильтра Калмана, подробное описание которого опускается. Каждую сигма-точку Sik, которая имеет такую же структуру, что и вектор
, Pxk, аппроксимирующей текущее состояние Xk. Сигма-точки Sik генерируют в соответствии с классическим методом сигма-точечного фильтра Калмана, подробное описание которого опускается. Каждую сигма-точку Sik, которая имеет такую же структуру, что и вектор  , выдает устройство 16 получения.
, выдает устройство 16 получения.
Ролью устройства 16 получения является получение первоначальной оценки (грубого значения) вектора состояния в момент k+1 при известности оценки этого вектора в момент k и данных двигательной установки 50 (в данном случае входных данных uk). Как было указано выше, это получение осуществляют при помощи уравнений (3), (4), (5), (6), для которых используют сеть RNA. Поскольку RNA является предсказательной моделью, этап получения в данном случае требует осуществления этапа предсказания. Изменения шумов vk и wk определяют в соответствии с классическими методами во время использования сигма-точечного фильтра Калмана. Для шума состояния в частном случае, когда используют выстраиваемую модель (как RNA), можно сравнить результаты этой модели с известными ситуациями, чтобы получить картографию точности RNA в ее области достоверности.
Затем значения сигма-точек Sik+1 в момент k+1, выдаваемые сетью RNA, используют для определения на выходе устройства 16 получения полученного (предсказанного) значения  состояния x в момент k+1, зная значение
состояния x в момент k+1, зная значение  в момент k, и ковариационной матрицы
в момент k, и ковариационной матрицы  состояния x в момент k+1, зная ковариационную матрицу Pk. Как показано на фиг. 1, эти значения поступают потом в устройство 18 коррекции.
состояния x в момент k+1, зная ковариационную матрицу Pk. Как показано на фиг. 1, эти значения поступают потом в устройство 18 коррекции.
Устройство 18 коррекции корректирует значения, полученные устройством 16 получения, когда измерения доступны. Для каждого компонента ракетного топлива, если измерение доступно (то есть, если соответствующий уровнемер всплыл), значение состояния xk+1 корректируют в зависимости от разности между измеренным уровнем у к и предсказанным уровнем (полученным уровнем)  . В частности, значение состояния корректируют на значение, пропорциональное указанной разности, и коэффициент пропорциональности называют «коэффициентом усиления Калмана». Коэффициент усиления Калмана классически вычисляют на основании сигма-точек и измерения уровня. В противном случае, если измерение уровня недоступно, сохраняют значение состояния xk+1, определенное при помощи уравнения (6) устройством 16 получения, например, фиксируя коэффициент усиления Калмана в нулевом значении. В зависимости от недоступности измерений или доступности одного или двух измерений (четыре возможных случая) устройство 18 коррекции соответственно корректирует расходы, полученные устройством 16 получения. Таким образом, устройство 18 коррекции включает в себя функцию выбора, адаптируемую к доступным измерениям.
. В частности, значение состояния корректируют на значение, пропорциональное указанной разности, и коэффициент пропорциональности называют «коэффициентом усиления Калмана». Коэффициент усиления Калмана классически вычисляют на основании сигма-точек и измерения уровня. В противном случае, если измерение уровня недоступно, сохраняют значение состояния xk+1, определенное при помощи уравнения (6) устройством 16 получения, например, фиксируя коэффициент усиления Калмана в нулевом значении. В зависимости от недоступности измерений или доступности одного или двух измерений (четыре возможных случая) устройство 18 коррекции соответственно корректирует расходы, полученные устройством 16 получения. Таким образом, устройство 18 коррекции включает в себя функцию выбора, адаптируемую к доступным измерениям.
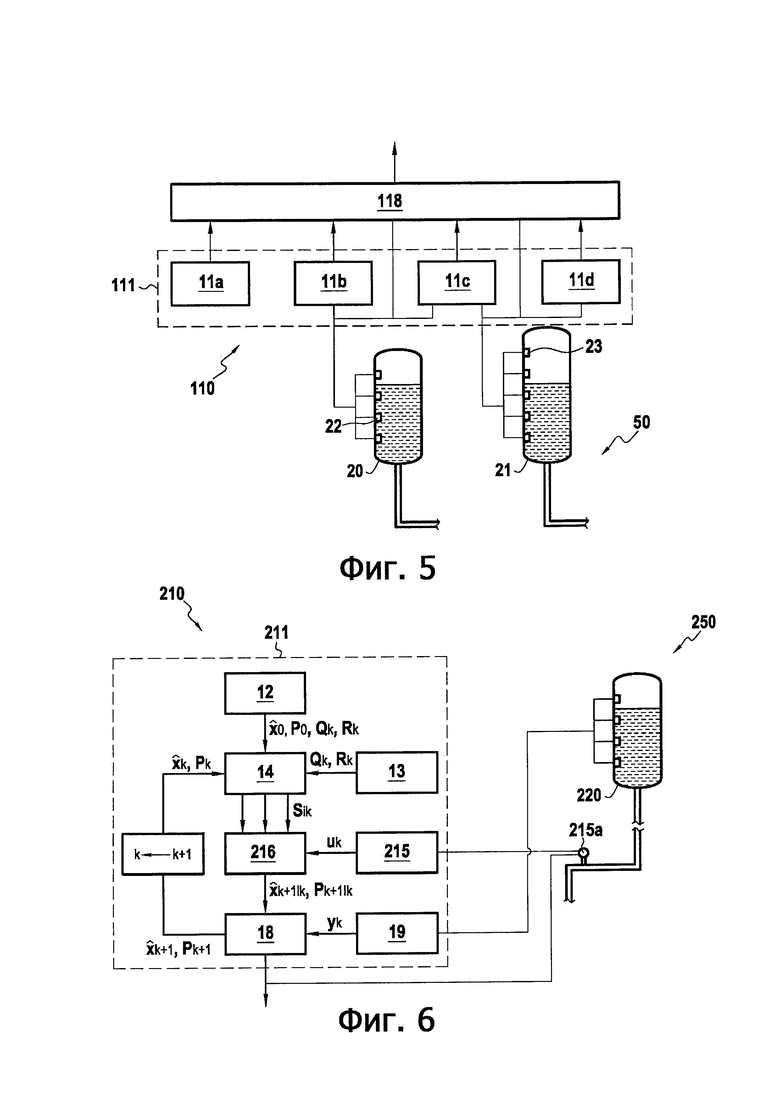
На фиг. 5 показан вариант, в котором различие случаев доступности измерения состоит в параллельном размещении в системе 110 оценки четырех вычислительных функций 11a, 11b, 11c, 11d, включенных в вычислительное устройство 111, каждую из которых параметрируют для обслуживания одного из четырех вышеупомянутых случаев доступности измерений. На фиг. 5 не претерпевшие изменения части двигательной установки 50 (в частности, камера 30 сгорания и входы в сторону вычислительных устройств) не показаны. Кроме того, каждая вычислительная функция 11a, 11b, 11c, 11d имеет архитектуру, аналогичную архитектуре функции, включенной в компьютер 11.
Вычислительная функция 11a оценивает расходы текучих сред, поступающих из баков 20, 21, не учитывая измерение уровня. Таким образом, устройство 18 коррекции, предусмотренное внутри вычислительного устройства 11a, не используется. Вычислительная функция 11b оценивает расходы текучих сред, поступающих из баков 20, 21, учитывая только измерения, поступающие от уровнемера 22, если они доступны. Аналогично, вычислительная функция 11d оценивает расходы текучих сред, поступающих из баков 20, 21, учитывая только измерения, поступающие от уровнемера 22, если они доступны. Наконец, вычислительная функция 11c оценивает расходы текучих сред, поступающих из баков 20, 21, учитывая измерения, поступающие от двух уровнемеров 22, 23, если они доступны.
Значения расходов, оцененные вычислительными функциями 11a, 11b, 11c, 11d, поступают в устройство 118 выбора. Устройство 118 выбора соединено также с уровнемерами 22, 23 для определения их доступности. Устройство 118 выбора осуществляет выбор между четырьмя полученными наборами расходов в зависимости от доступности измерений, передаваемых уровнемерами 22, 23. На выходе устройство 118 выбора передает набор расходов, выдаваемый вычислительным устройством, которое учитывает именно доступные измерения. Например, если доступно только измерение, передаваемое уровнемером 22, устройство 118 выбора передает набор расходов, полученный от вычислительного устройства 11b.
В варианте устройство 118 выбора может находиться на входе или на том же уровне, что и вычислительные функции 11a, 11b, 11c, 11d.
Во всех случаях система 10, 110 оценки позволяет переустановить значение, полученное устройством 16 получения, на основе дискретных и несинхронных измерений.
Способ, осуществляемый системой 10 оценки, обеспечивает моментальную оценку расходов. Как показано на фиг. 1, чтобы оценить последовательные расходы, рекуррентный конур позволяет переходить к следующему моменту и повторять описанные выше этапы. На каждом этапе оцененный расход, то есть полученный и затем скорректированный расход равен  , где расчетный грубый расход
, где расчетный грубый расход  определяют в основном при помощи RNA, а расчетную систематическую погрешность
определяют в основном при помощи RNA, а расчетную систематическую погрешность  определяют в основном при помощи UKF.
определяют в основном при помощи UKF.
Далее со ссылками на фиг. 3A-3B и 4А-4С следует описание примера применения. На фиг. 4А-4С показана работа двигательной установки 50 во время двух фаз (две рабочие точки), каждая продолжительностью сто секунд. На фиг. 4А показано изменение расхода ракетного топлива, поступающего из бака 20 в камеру 30 сгорания, оцениваемого только сетью RNA (кривая Q20a) и устройством 10 оценки (кривая Q20b). Для сравнения показано реальное значение расхода (кривая Q20c). Как следует из фиг. 4А, во время первых секунд расход, оцениваемый только сетью RNA (кривая Q20a), является более близким к реальному расходу (кривая Q20c), чем расход, оцениваемый устройством оценки (кривая Q20b). Это связано с произвольными значениями, которые могут исходить от устройства 12 инициализации. Спустя несколько секунд это отклонение исчезает.
В момент t=t1 (10c), как показано на фиг. 3A, уровнемер 22 всплывает, и средства 17 измерения считывают измерения уровня. Таким образом, на основании этих измерений устройство 18 коррекции может корректировать значения, выдаваемые устройством 16 получения. В результате устанавливается переходный режим кривой Q20b, затем происходит стабилизация оцениваемого расхода на уровне, близком к реальному расходу (кривая Q20c). Уровнемер 22 остается на поверхности до t=t3 (40c), затем опять становится недоступным. Между t3 и t5 оцениваемый расход, выраженный кривой Q20b, оценивают только при помощи устройства 16 получения, так как устройство 18 коррекции не производит никакого действия. Следует отметить, что после первой переустановки на основании измерений и, в частности, с двух сторон от изменения рабочей точки (t=100c), расход, оцениваемый устройством 10 оценки, следует реальному расходу (кривая Q20c) с высокой точностью, тогда как расход, оцениваемый только сетью RNA (кривая Q20a), по-прежнему сохраняет почти постоянную систематическую погрешность или отклонение относительно реального расхода.
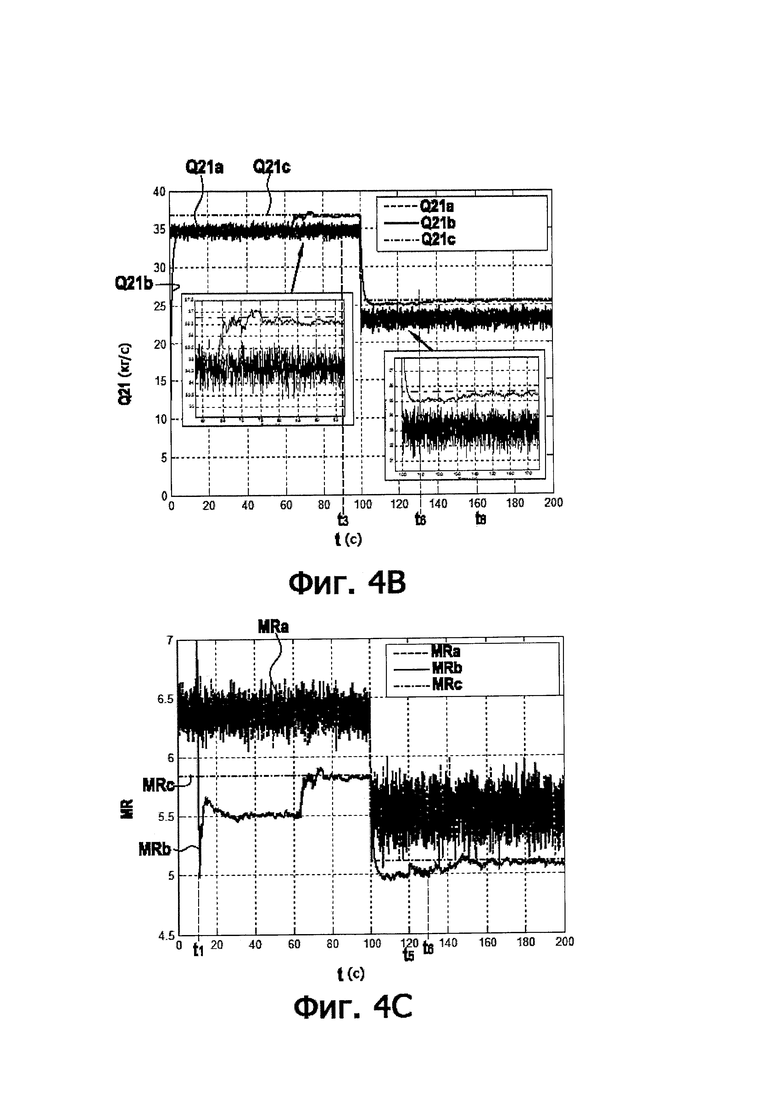
На фиг. 4B, аналогично фиг. 4А, показано изменение расхода ракетного топлива, поступающего из бака 21 в камеру 30 сгорания. Кривая Q21a отображает расход, оцениваемый только сетью RNA, кривая Q21b отображает расход, оцениваемый устройством 10 оценки, и кривая Q21c отображает реальный расход. Отмечается, что кривая Q21b следует кривой Q21a, пока не задействовано устройство коррекции (см. фиг. 3B: до t=t3, 60 с, уровнемер 23 не передает никаких измерений). Затем кривая Q21b по существу приближается к кривой Q21c. Увеличенное изображение справа на фиг. 4B позволяет констатировать аналогичный эффект во время второго всплытия уровнемера 23, то есть между t6 (130c) и t8 (160c). Таким образом, использование сигма-точечного фильтра Калмана значительно улучшает результаты, которые могла бы выдавать только оценочная функция, в частности, типа RNA.
На фиг. 4С показано изменение соотношения смеси в зависимости от времени. Соотношение смеси определяют как соотношение двух компонентов ракетного топлива. Каждую кривую MRz получают при помощи отношения Q21z/Q20z, где z равно a, b или c. Соотношение компонентов смеси является величиной, часто используемой для регулирования рабочей точки двигательной установки, такой как двигательная установка 50.
Изменение кривой MRb, отображающей соотношение смеси, вычисленное на основании расходов, оцененных устройством 10 оценки, хорошо показывает соответствующие переустановки каждого расхода в моменты t1 и t3, затем t5 и t6. Таким образом, устройство 10 оценки дает точную оценку соотношения смеси, благодаря последовательным переустановкам, обеспечиваемым сигма-точечным фильтром Калмана.
На фиг. 6 представлен другой вариант выполнения устройство 210 оценки расхода ракетного топлива. На этой фигуре элементы, соответствующие или идентичные элементам первого варианта выполнения, имеют такие же обозначения с добавлением сотни, и их повторное описание опускается.
Устройство 210 оценки, показанное на фиг. 6, объединено с контуром 250 текучей среды, содержащий бак 220, из которого поступает текучая среда. На выходе бака расходомер 215а измеряет расход текучей среды. Однако расходомер 215а может быть неточным и допускать погрешности. Устройство 210 предназначено для коррекции значения расхода, передаваемого расходомером 215а, на основании измерений уровня текучей среды в баке 220.
Устройство 210 оценки работает, как и устройство 10 оценки, за исключением того, что оно использует измерения, передаваемые расходомером 215а, вместо применения предсказательной математической оценочной функции, такой как RNA. Иначе говоря, в вышеупомянутом уравнении (3) член RNAk(uk) заменен на текущее значение, измеряемое расходомером 215а и считываемое устройством 215 считывания. Затем значение расхода, полученное устройством 216 получения, поступает в устройство 18 коррекции, которое корректирует его в зависимости от измерений yk, получаемых от считывающей платы 19. Как показано на фиг. 6, устройство 210 оценки передает скорректированный оценочный расход в расходомер 215а, чтобы изменить калибровку расходомера с целью уменьшения систематической погрешности измерений.
Настоящее изобретение было описано со ссылками на конкретные примеры выполнения, но в эти примеры можно вносить изменения, не выходя за рамки общего объема изобретения, определенного в формуле изобретения. В частности, индивидуальные признаки различных представленных вариантов выполнения можно комбинировать в дополнительных вариантах выполнения. Следовательно, описание и чертежи носят чисто иллюстративный характер и не являются ограничительными.
Система (10) оценки расхода текучей среды, поступающей из бака (20, 21), содержащая средства (17, 22, 23) измерения, выполненные с возможностью измерения уровня текучей среды в баке (20, 21), отличающаяся тем, что содержит средства расчета расхода текучей среды при помощи сигма-точечного фильтра Калмана, при этом указанные средства расчета содержат средства (16) получения грубого расхода текучей среды, а также средства (18) коррекции, связанные со средствами получения и со средствами измерения и выполненные с возможностью коррекции грубого расхода, полученного указанными средствами (16) получения, в зависимости от уровня, измеренного указанными средствами измерения. Изобретение также относится к способу, осуществляемому такой системой. 7 н. и 5 з.п. ф-лы, 10 ил.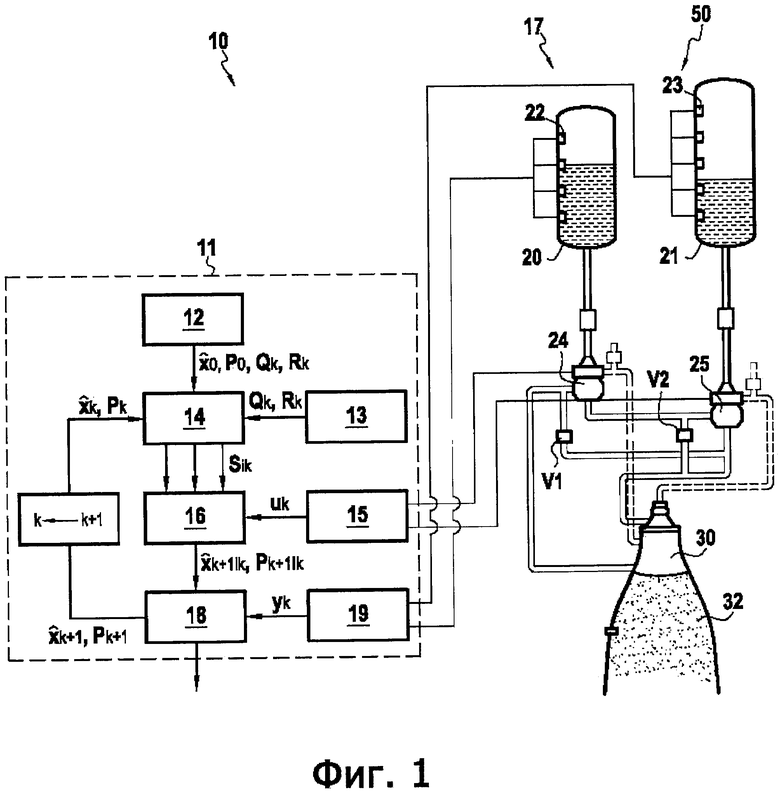
1. Способ оценки расхода текучей среды, поступающей из бака (20,21), включающий измерение уровня (yk) текучей среды в баке, отличающийся тем, что содержит этап расчета расхода ( ) текучей среды при помощи сигма-точечного фильтра Калмана, при этом на указанном этапе расчета получают грубый расход (
) текучей среды при помощи сигма-точечного фильтра Калмана, при этом на указанном этапе расчета получают грубый расход ( ) текучей среды, и если измерение уровня (yk) является доступным, выполняют этап коррекции, во время которого полученный грубый расход корректируют в зависимости от указанного измерения уровня.
) текучей среды, и если измерение уровня (yk) является доступным, выполняют этап коррекции, во время которого полученный грубый расход корректируют в зависимости от указанного измерения уровня.
2. Способ оценки по п. 1, в котором грубое значение расхода () измеряют при помощи по меньшей мере одного датчика (215а), в частности, расходомера.
3. Способ оценки по п. 1, в котором грубое значение расхода () вычисляют путем математического расчета с итеративно оцениваемыми коэффициентами, в частности, при помощи искусственной нейронной сети.
4. Способ оценки по любому из пп. 1-3, в котором масса (mk) текучей среды в баке (20,21) является нелинейной функцией уровня (nk) текучей среды в баке.
5. Способ оценки по любому из пп. 1-4, в котором состояние сигма-точечного фильтра Калмана включает в себя систематическую погрешность (Ek) грубого значения расхода ().
6. Способ оценки по любому из пп. 1-5, дополнительно содержащий перед этапом коррекции этап фильтрации флуктуаций указанного измерения уровня (yk).
7. Способ оценки двух расходов текучих сред, поступающих соответственно из первого бака и из второго бака, характеризующийся тем, что расходы текучих сред оценивают отдельно, при этом:
- выполняют первый способ оценки, содержащий этап расчета расходов текучих сред ( k) при помощи сигма-точечного фильтра Калмана, при этом не учитывают измерения уровня;
k) при помощи сигма-точечного фильтра Калмана, при этом не учитывают измерения уровня;
- выполняют второй способ по любому из пп. 1-6, в котором учитывают только одно измерение уровня первого бака;
- выполняют третий способ по любому из пп. 1-6, в котором учитывают только одно измерение уровня второго бака;
- выполняют четвертый способ по любому из пп. 1-6, в котором учитывают оба измерения уровня; и
передают расходы, оцененные при помощи того из указанных четырех способов, который учитывает именно доступные измерения.
8. Система (10,110,210) оценки расхода текучей среды, поступающей из бака (20,21,220), содержащая средства (17,22,23) измерения, выполненные с возможностью измерения уровня (yk) текучей среды в баке (20,21,220), отличающаяся тем, что содержит средства расчета расхода () текучей среды при помощи сигма-точечного фильтра Калмана, при этом указанные средства расчета содержат средства (16,216) получения грубого расхода текучей среды, а также средства (18) коррекции, связанные со средствами получения и со средствами измерения и выполненные с возможностью коррекции грубого расхода (), полученного указанными средствами (16,216) получения, в зависимости от уровня (yk), измеренного указанными средствами измерения.
9. Двигательная установка (50), содержащая два бака (20,21), в каждом из которых находится компонент ракетного топлива, камеру (30) сгорания, в которую нагнетаются оба компонента ракетного топлива, и систему (10) оценки расхода текучей среды, поступающей из бака, по п.8, которая предназначена для оценки расхода по меньшей мере одного из указанных компонентов ракетного топлива.
10. Система переустановки расходомера (215а), содержащая систему (220) оценки по п. 8 для оценки расхода текучей среды, проходящей через расходомер.
11. Носитель информации, считываемый компьютером и содержащий записанную компьютерную программу с командами для выполнения этапов способа оценки по любому из пп. 1-6.
12. Носитель информации, считываемый компьютером и содержащий записанную компьютерную программу с командами для выполнения этапов способа оценки по п. 7.
| WO 2012161716 A1, 29.11.2012 | |||
| FR 2965305 A1, 30.03.2012 | |||
| WO 2012156615 A3, 22.11.2012 | |||
| FR 2996302 A1, 04.04.2014. |

