Изобретение относится к измерительной технике и может быть использовано, в частности, для измерения угла поворота в счетно-решающих устройствах и системах автоматики или в цифровых следящих системах.
Из известных преобразователей углового перемещения наиболее близким по технической сущности и достигаемому положительному эффекту является устройство для измерения угловых перемещений [Россия, а.с. №819574, G 01 В 7/30, 1978], содержащее вращающийся трансформатор, два фазочувствительных демодулятора, подключенные к нему, вычислительный блок, первые два выхода которого подключены к выходам соответствующих демодуляторов, сумматор, подключенный к выходу вычислительного блока, блок управления ключами, подключенный к выходу сумматора и третьему входу вычислительного блока, блок управляемых ключей, подключенный к блоку управления ключами, источники эталонных напряжений, связанные через блок управляемых ключей со вторым входом сумматора, выход сумматора через управляемый блок обратной связи подключен к своему третьему входу, второй вход управляемого блока обратной связи соединен с блоком управления ключами.
Недостатком устройства является невысокая точность измерения угловых перемещений, обусловленная нелинейностью функций, реализуемых вычислительным блоком. При этом расчетная среднеквадратическая ошибка определения угла поворота составляет 1.1 градуса, что в процентном соотношении равно 0.3%.
Техническим результатом изобретения является повышение точности измерения угловых перемещений.
Указанный результат достигается за счет того, что в известное устройство для измерения угловых перемещений, содержащее вращающийся трансформатор, два выхода которого соединены с первыми входами соответствующих фазочувствительных демодуляторов, а вход первичной обмотки трансформатора соединен со вторыми входами фазочувствительных демодуляторов, последовательно соединенные вычислительный блок и сумматор, выход которого является выходом устройства, и последовательно соединенные источник эталонных напряжений и блок управляемого ключа, а также управляемый блок обратной связи, введены устройство сравнения, решающее устройство и блок корректирующих напряжений. При этом первые выходы демодуляторов подключены как к устройству сравнения, так и к вычислительному блоку. Вторые выходы демодуляторов подключены ко второму и третьему входу решающего устройства соответственно. Выход устройства сравнения подключен к первому входу решающего устройства. Три выхода решающего устройства подключены следующим образом: первый выход подключен к первому входу управляемого блока обратной связи; второй выход подключен ко второму входу вычислительного блока; третий выход подключен ко второму входу блока управляемого ключа. Выход блока управляемого ключа подключен ко второму входу блока корректирующих напряжений. К первому входу данного блока подключен выход управляемого блока обратной связи. Выход блока корректирующих напряжений подключен как ко второму входу управляемого блока обратной связи, так и ко второму входу сумматора. Второй и третий выходы источника эталонных напряжений подключены к четвертому и пятому входам вычислительного блока соответственно.
Заявляемое устройство для измерения угловых перемещений позволяет разделить полный оборот ротора вращающегося трансформатора, равный 360 градусам, на 8 равных участков по 45 градусов каждый и рассчитать угол поворота ротора на каждом участке отдельно за счет введения устройства сравнения и последовательно соединенного с ним решающего устройства. Введение блока корректирующих напряжений позволяет получить на выходе устройства непрерывную величину, линейно-зависимую от угла поворота ротора вращающегося трансформатора.
Так как демодуляторы выполнены фазочувствительными, то это позволяет получить со вторых выходов данных демодуляторов два признака к1, и к2, поступающие на соответствующие входы решающего устройства
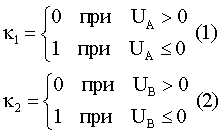
При этом введение устройства сравнения позволяет получить признак соотношения сигналов с выходов демодулятора к3:
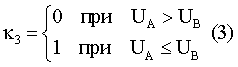
где UА - сигнал с первого выхода первого демодулятора;
UB - сигнал с первого выхода второго демодулятора;
Um - амплитуда сигналов с первых выходов демодуляторов;
α - угол поворота вала ротора вращающегося трансформатора.
Данные коэффициенты к1, к2 и к3 позволяют разделить полный оборот ротора вращающегося трансформатора на участки по 45 градусов. Что обеспечивает наиболее точную аппроксимацию угла поворота на каждом участке отдельно.
Получение решающим устройством трех признаков к1, к2, и к3 позволяет данному устройству принять решение об участке (табл.), в котором находится искомое значение угла, и сформировать сигналы управления, которые определяют для вычислительного блока номер формулы (табл.), по которой необходимо производить расчет, а для блока управляемых ключей и блока корректирующих напряжений определяют значение корректирующего напряжения, необходимого для подачи на второй вход сумматора (табл.).
Вычислительный блок по сигналу номера формулы, получаемому с решающего устройства, производит расчет значения угла поворота ротора вращающегося трансформатора по данным, получаемым с выходов демодуляторов:
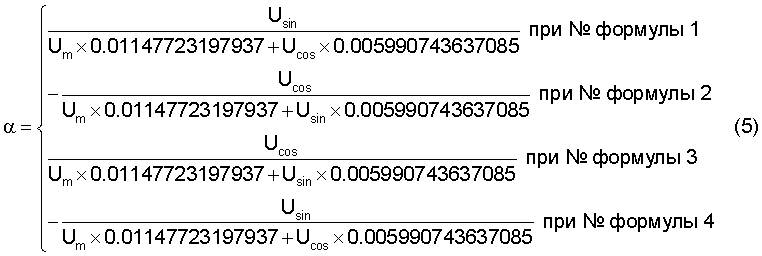
На выходе вычислительного блока формируется сигнал, прямо пропорциональный углу поворота ротора вращающегося трансформатора. При этом данный сигнал является линейным на каждом участке отдельно. Но при этом на соседних участках рассчитанные значения не являются линейными по отношению друг к другу. Сигнал с выхода вычислительного блока поступает на первый вход сумматора.
Введение блока корректирующих напряжений позволяет получить на выходе сумматора сигнал F(α), величина которого прямо пропорциональна углу поворота ротора вращающегося трансформатора и является линейной при угле поворота, равном от 0 до 360 градусов:
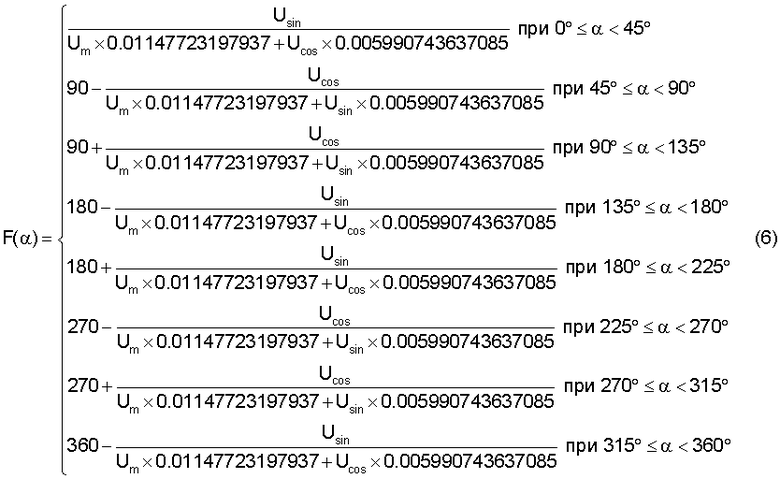
Рассчитанное значение угла поворота ротора вращающегося трансформатора значительно точнее, чем в прототипе, и используется в счетно-решающих устройствах и системах автоматики или в цифровых следящих системах. При этом анализ формулы 6, по которой производится расчет, показал, что среднеквадратическая ошибка определения угла составляет 0,006 градуса. Что на несколько порядков точнее, чем в прототипе.
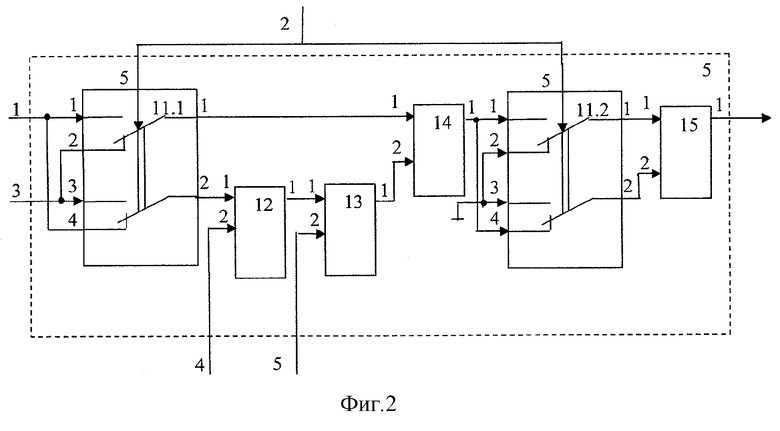
На фиг.1 представлена структурная схема устройства для измерения угловых перемещений. На фиг.2 - структурная схема выполнения вычислительного блока 5.
Устройство для измерения угловых перемещений (фиг.1) содержит вращающийся трансформатор 1, два фазочувствительных демодулятора 2, устройство сравнения 3, решающее устройство 4, вычислительный блок 5, сумматор 6, источник эталонного напряжения 7, блок управляемого ключа 8, блок корректирующих напряжений 9, управляемый блок обратной связи 10.
При этом два выхода вращающегося трансформатора 1 подключены к соответствующим входам двух фазочувствительных демодуляторов 2. На вторые входы демодуляторов 2 подается напряжение, поступающее на первичную обмотку вращающегося трансформатора 1. Сигналы с первых выходов фазочувствительных демодуляторов 2 поступают как на первый и третий вход вычислительного блока 5, так и на входы устройства сравнения 3. Выход устройства сравнения 3 подключен к первому входу решающего устройства 4. На второй и третий входы решающего устройства 4 поступают сигналы со вторых выходов демодуляторов 2. Второй выход решающего устройства 4 подключен ко второму входу вычислительного блока 5. К четвертому и пятому входам вычислительного блока 5 подключены второй и третий выходы источника эталонных напряжений 7 соответственно. Выход вычислительного блока 5 подключен к первому входу сумматора 6. Выход сумматора 6 является выходом устройства. Источник эталонных напряжений 7 первым выходом подключен к первому входу блока управляемых ключей 8. Выход блока управляемых ключей 8 подключен ко второму входу блока корректирующих напряжений 9. Выход блока корректирующих напряжений 9 подключен ко второму входу сумматора 6, а также ко второму входу управляемого блока обратной связи 10. Выход управляемого блока обратной связи 10 подключен к первому входу блока корректирующих напряжений 9. На первый вход управляемого блока обратной связи 10 поступают сигналы с первого выхода решающего устройства 4. Третий выход решающего устройства 4 подключен к третьему входу блока управляемого ключа 8.
Для реализации технического решения может быть использовано стандартное промышленное оборудование. Так, например, фазочувствительные демодуляторы 2.1 и 2.2 могут быть реализованы по схеме построения синхронных детекторов.
Устройство сравнения 3 может быть выполнено на основе компаратора серии КР597СА3 [А.Л.Булычев, В.И.Галкин, В.А.Прохоренко. Аналоговые интегральные схемы: Справочник. - 2-е изд., перераб. и доп. - Минск: Беларусь, 1993 г., 384 с., 242 с., рис 1.295].
Решающее устройство 4 может быть реализовано при помощи дешифратора, выполненного на базе микросхемы КР1533ИД7 [М.И.Богданович, И.Н.Грель, В.А.Прохоренко, В.В.Шалимо. Цифровые интегральные микросхемы: Справочник. Минск: Беларусь, 1991 г., 496 с., 240 с., рис 2.159].
Вычислительный блок 5 (см. фиг.2) может быть выполнен с использованием методов математического применения операционных усилителей [М.Кауфман, А.Сидман. Практическое руководство по расчету схем в электронике 1: Справочник. М.: Энергоатомиздат, 1991 г., 368 с., 249 стр.] и содержит два коммутатора - 11.1, 11.2, умножитель 12, сумматор 13, делитель 14 и дифференциальный усилитель 15. При этом сигналы с первого входа вычислительного блока 5 поступают как на первый, так и на четвертый входы коммутатора 11.1, а сигналы со второго входа вычислительного блока 5 поступают как на второй, так и на третий входы коммутатора 11.1. Сигнал со второго выхода коммутатора 11.1 поступает на первый вход умножителя 12. На второй вход умножителя 12 поступает сигнал с четвертого входа вычислительного блока. Результирующий сигнал с первого выхода умножителя 12 поступает на первый вход сумматора 13. На второй вход данного сумматора 13 поступает сигнал с пятого входа вычислительного блока 5. Выход сумматора 13 подключен ко второму входу делителя 14. Первый вход данного делителя 14 подключен к первому выходу коммутатора 11.1. Выход делителя подключен как к первому, так и к четвертому входам коммутатора 11.2. На второй и третий входы коммутатора 11.2 подается корпус. На пятые входы коммутаторов 11.1 и 11.2 поступают сигналы со второго входа вычислительного блока 5. Первый и второй входы коммутатора 11.2 подключены к первому и второму входам дифференциального усилителя 15 соответственно. Выход дифференциального усилителя 15 является выходом вычислительного блока 5.
Коммутаторы 11.1 и 11.2 могут быть выполнены с использованием аналоговых коммутаторов на базе микросхеме серии КР590КН3 [С.В.Якубовский, Л.И.Ниссельсон, В.И.Кулешова, В.А.Ушибышев, М.Н.Топешкин. Цифровые и аналоговые микросхемы: Справочник. -М.: Радио и связь, 1990 г., 496 с., 450 с., рис.5.162, б]. Умножитель 12 может быть выполнен по схеме умножения [М.Кауфман, А.Сидман, Практическое руководство по расчету схем в электронике 1: Справочник. -М.: Энергоатомиздат, 1991 г., 368 с., 255 с., рис 12.25]. Сумматор 13 может быть выполнен по схеме суммирующего усилителя [М.Кауфман, А.Сидман. Практическое руководство по расчету схем в электронике 1: Справочник. -М.: Энергоатомиздат, 1991 г., 368 с., 249 стр., рис 12.12]. Делитель 14 выполнен по схеме деления [М.Кауфман, А.Сидман. Практическое руководство по расчету схем в электронике 1: Справочник. -М.: Энергоатомиздат, 1991 г., 368 с., 255 с., рис 12.25]. Дифференциальный усилитель 15 может быть выполнен на базе операционного усилителя КР544УД2 [С.В.Якубовский, Л.И.Ниссельсон, В.И.Кулешова, В.А.Ушибышев, М.Н.Топешкин. Цифровые и аналоговые микросхемы: Справочник. -М.: Радио и связь, 1990 г., 496 с., 350 с., рис.5.19].
Сумматор 6 (см. фиг.1) может быть выполнен по схеме суммирующего усилителя [М.Кауфман, А.Сидман. Практическое руководство по расчету схем в электронике 1: Справочник. -М.: Энергоатомиздат, 1991 г., 368 с., 249 с., рис 12.12] с коэффициентом усиления, равным единице [М.Кауфман, А.Сидман. Практическое руководство по расчету схем в электронике 1: Справочник. -М.: Энергоатомиздат, 1991 г., 368 с., 249 с., рис 12.12].
Блок управляемого ключа 8 может представлять собой аналоговый коммутатор, выполненный на микросхеме серии КР590КН6 [С.В.Якубовский, Л.И.Ниссельсон, В.И.Кулешова, В.А.Ушибышев, М.Н.Топешкин. Цифровые и аналоговые микросхемы: Справочник. -М.: Радио и связь, 1990 г., 496 с., 450 с., рис.5.162, г].
Блок корректирующих напряжений 9 совместно с управляемым блоком обратной связи 10 представляет собой усилитель входного сигнала с переменным коэффициентом усиления. Величина выходного напряжения данного блока изменяется (см. таблицу) в зависимости от сигналов решающего устройства.
Устройство для измерения угловых перемещений работает следующим образом.
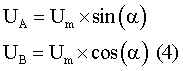
При повороте вала вращающегося трансформатора 1 на его вторичных обмотках появляются сигналы, амплитуда которых пропорциональна синусу и косинусу угла поворота соответственно. После демодуляции в фазочувствительных демодуляторах 2.1 и 2.2 эти напряжения, пропорциональные синусу и косинусу угла поворота, поступают на входы устройства сравнения 3, а также на первый и третий входы вычислительного блока 5. На вторые входы фазочувствительных демодуляторов 2 поступает опорное напряжение, подаваемое на первичную обмотку трансформатора 1. На вторых выходах демодуляторов 2 формируются знаковые сигналы, поступающие на второй и третий входы решающего устройства 4. Решение о соотношении синусного и косинусного сигналов из устройства сравнения 3 поступает на первый вход решающего устройства 4. Решающее устройство 4 по трем поступившим признакам формирует сигналы управления, поступающие на вычислительный блок 5, управляемый блок обратной связи 10 и блок управляемого ключа 8. На выходах источника эталонных напряжений 7 формируются напряжения, пропорциональные следующим величинам (согласно формулы 6):
- на первом выходе 90×К4 (В);
- на втором выходе 0.005990743637085×К4 (В);
- на третьем выходе Um×0.01147723197937×К4 (В);
где К4 - коэффициент пропорциональности, а Um - амплитуда рабочего сигнала вращающегося трансформатора. Данные напряжения распределяются следующим образом:
- напряжение с первого выхода источника эталонных напряжений 7 поступает на первый вход блока управляемого ключа 8;
- напряжение со второго выхода источника эталонных напряжений 7 поступает на четвертый вход вычислительного блока 5;
- напряжение с третьего выхода источника эталонных напряжений поступает на пятый вход вычислительного блока 5.
В зависимости от значений сигналов, поступивших на второй вход вычислительного блока 5, коммутаторы 11.1 и 11.2 обеспечивают различное прохождение сигналов с первого и третьего входа вычислительного блока 5, а также обеспечивают различную фазу сигналов на выходе вычислительного блока 5 (см. фиг.2). Скоммутированный сигнал со второго выхода коммутатора 11.1 поступает на первый вход умножителя 12. На второй вход данного умножителя 12 поступает напряжение с четвертого входа вычислительного блока 5. Результирующий сигнал произведения с выхода умножителя 12 поступает на первый вход сумматора 13. На второй вход данного сумматора 13 поступает напряжение с пятого входа вычислительного блока 5. Результирующий сигнал сложения с выхода сумматора 13 поступает на второй вход делителя 14, на первый вход которого поступает сигнал с первого выхода коммутатора 11.1. Результирующий сигнал деления с выхода делителя 14 поступает на первый и четвертый входы коммутатора 11.2. И далее, в зависимости от коммутации коммутатором 11.2, на первый или второй входы дифференциального усилителя 15. Дифференциальный усилитель 15 обеспечивает противофазность на выходе вычислительного блока 5. Таким образом, по значению сигналов, поступивших на второй вход вычислительного блока 5, производится выбор формулы и расчет функциональных зависимостей (5). Функции, решаемые вычислительным блоком 5, достаточно линейны на каждом выбранном участке. Непрерывная линейная зависимость в пределах от 0 до 360 градусов обеспечивается сложением напряжения с выхода вычислительного блока 5 с корректирующим напряжением блока корректирующих напряжений 9 в сумматоре 6. Величина корректирующего напряжения изменяется в зависимости от сигнала, поступающего с первого выхода решающего устройства 4 на первый вход управляемого блока обратной связи 10, а также в зависимости от сигнала, поступающего с третьего выхода решающего устройства 4 на второй вход блока управляемого ключа 8. Блок управляемого ключа 8 обеспечивает прохождение эталонного напряжения с первого выхода источника эталонных напряжений 7 на второй вход блока корректирующих напряжений 9. На выходе сумматора 6 формируется суммарный сигнал, величина которого пропорциональна углу поворота ротора вращающегося трансформатора 1.
Таким образом, введение устройства сравнения 3, решающего устройства 4 и блока корректирующих напряжений 9, а также уточнение функций, используемых при расчетах, позволяет повысить точность определения угла поворота более чем в 2 раза. При этом среднеквадратическая ошибка определения угла составляет 0,006 градуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь напряжения | 1990 |
|
SU1814177A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Преобразователь кода в угол поворота вала | 1989 |
|
SU1711330A1 |
| Устройство для измерения угловых перемещений | 1982 |
|
SU1035414A1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460224C1 |
| Устройство формирования сигналов с четырехпозиционной манипуляцией | 2016 |
|
RU2631149C1 |
| Устройство для управления преобразователем напряжения | 1982 |
|
SU1156222A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1234727A1 |
| Устройство для управления металлорежущим станком | 1978 |
|
SU746421A1 |
| Устройство для измерения угловых перемещений | 1979 |
|
SU922504A2 |
Изобретение относится к измерительной технике и может быть использовано, в частности, для измерения угла поворота в счетно-решающих устройствах и системах автоматики или в цифровых следящих системах. Техническим результатом от реализации данного изобретения является повышение точности измерения угловых перемещений. Устройство для измерения угловых перемещений содержит вращающийся трансформатор, вход первичной обмотки которого соединен со вторыми входами фазочувствительных демодуляторов, к первым входам которых подключены соответствующие выходы вращающегося трансформатора, последовательно соединенные вычислительный блок и сумматор, выход которого является выходом устройства и последовательно соединенные источник эталонных напряжений и управляемый ключ, а также управляемый блок обратной связи. В предложенное устройство дополнительно введены устройство сравнения, решающее устройство и блок корректирующих напряжений, к первому и второму входам которого подключены управляемый блок обратной связи и блок управляемого ключа соответственно, а к выходу - вторые входы сумматора и управляемого блока обратной связи, первый вход которого подсоединен к первому выходу решающего устройства, к соответствующим входам которого подключены устройство сравнения и два фазочувствительных демодулятора, первые выходы которых подсоединены к соответствующим входам устройства сравнения и вычислительного блока, ко второму входу которого подключен второй выход решающего устройства, третий выход которого подключен ко второму входу блока управляемого ключа, причем второй и третий выходы источника эталонных напряжений подсоединены к четвертому и пятому входам вычислительного блока. 2 ил., 1 табл.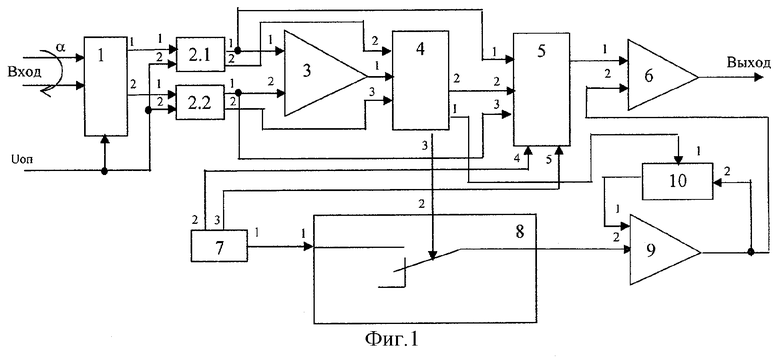
Устройство для измерения угловых перемещений, содержащее вращающийся трансформатор, вход первичной обмотки которого соединен со вторыми входами фазочувствительных демодуляторов, к первым входам которых подключены соответствующие выходы вращающегося трансформатора, последовательно соединенные вычислительный блок и сумматор, выход которого является выходом устройства, и последовательно соединенные источник эталонных напряжения и управляемый ключ, а также управляемый блок обратной связи, отличающееся тем, что в него введены устройство сравнения, решающее устройство и блок корректирующих напряжений, к первому и второму входам которого подключены управляемый блок обратной связи и блок управляемого ключа соответственно, а к выходу - вторые входы сумматора и управляемого блока обратной связи, первый вход которого подсоединен к первому выходу решающего устройства, к соответствующим входам которого подключены устройство сравнения и два фазочувствительных демодулятора, первые выходы которых подсоединены к соответствующим входам устройства сравнения и вычислительного блока, ко второму входу которого подключен второй выход решающего устройства, третий выход которого подключен ко второму входу блока управляемого ключа, причем второй и третий выходы источника эталонных напряжений подсоединены к четвертому и пятому входам вычислительного блока.
| Устройство для измерения угловыхпЕРЕМЕщЕНий | 1978 |
|
SU819574A1 |
| Способ преобразования угловых перемещений в фазу выходного сигнала и устройство для его осуществления | 1989 |
|
SU1651090A1 |
| Способ контроля погрешности синусно-косинусного преобразователя перемещений в фазу выходного сигнала | 1990 |
|
SU1744441A1 |
| RU 94024246 A1, 27.01.1996 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА | 1996 |
|
RU2161773C2 |
| US 4926121 А, 15.05.1990 | |||
| US 5220282 А, 15.06.1993 | |||
| US 4970450 А, 13.11.1990. | |||

