Изобретение, относится к весоизмерительной технике и предназначено для использования при дозировании сыпучих материалов.
Цель изобретения - повышение точности за счет устранения составляющей опгабки, обусловленной изменением коэффициента передачи преоб- разоватс,ля массы в электрический сигнал.
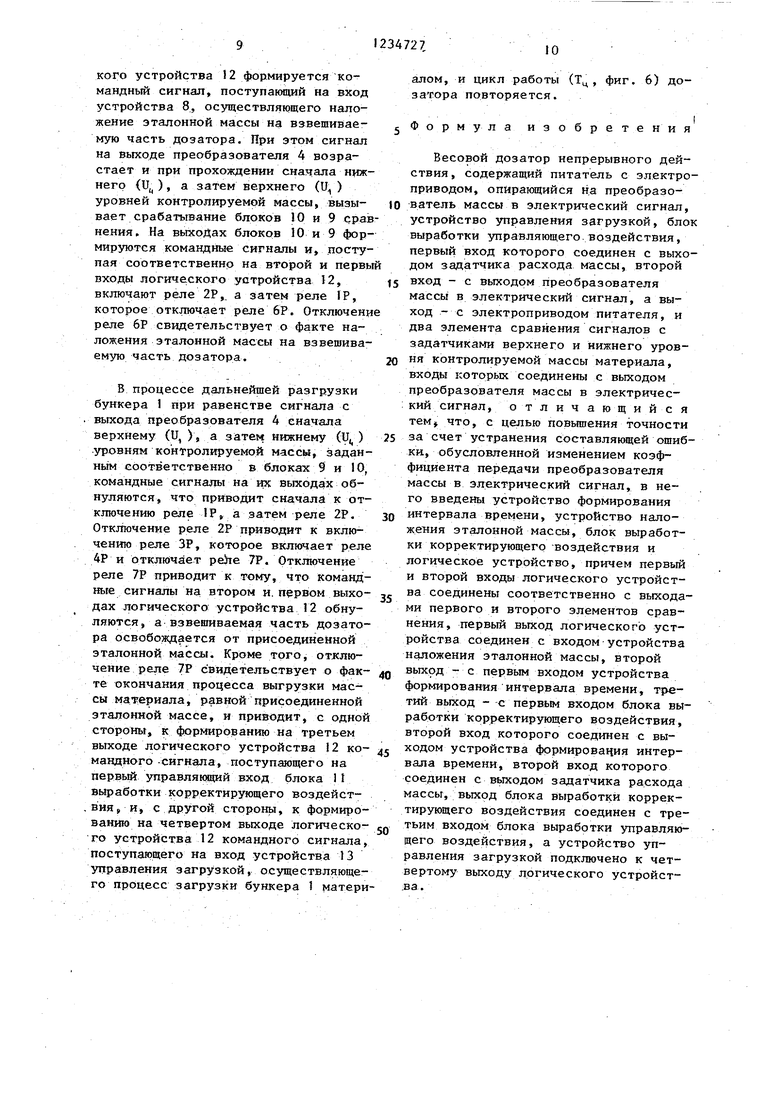
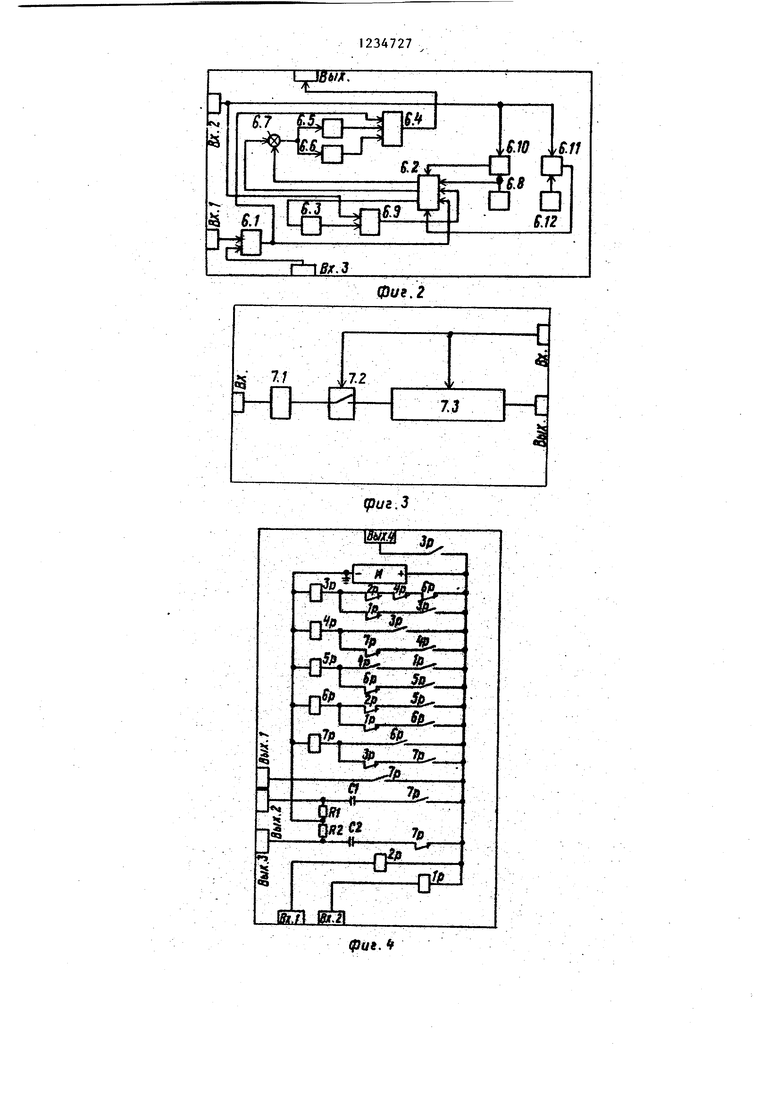
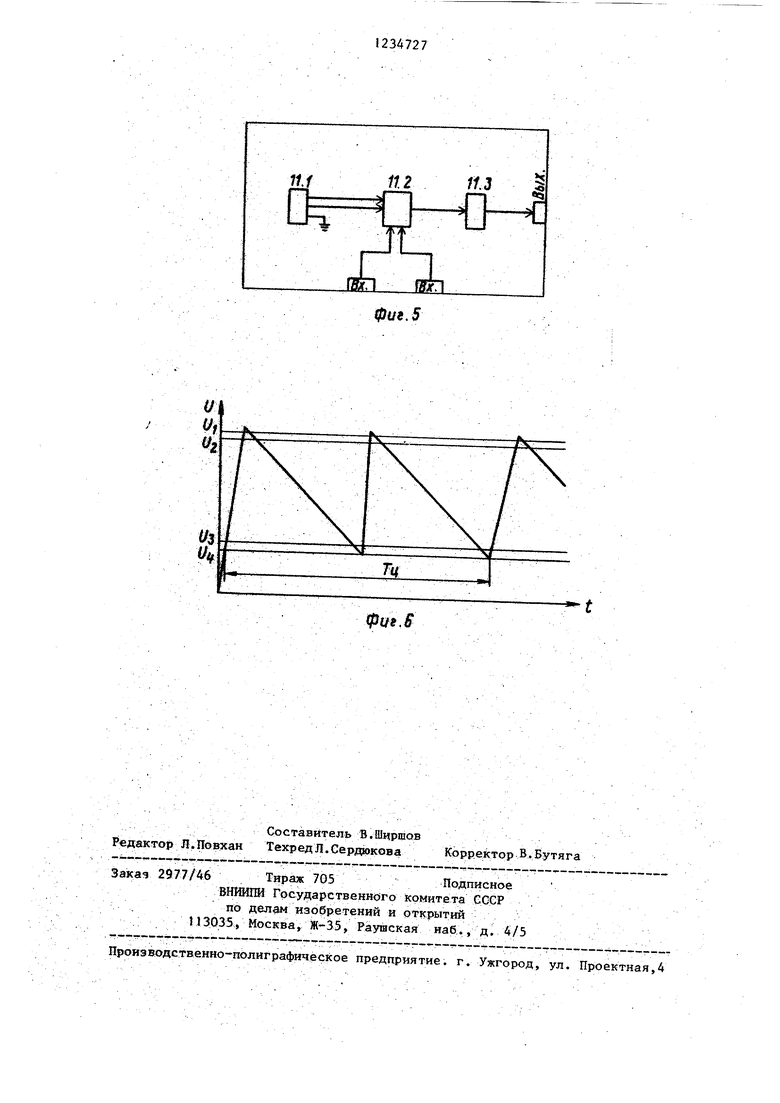
На фиг, 1 изображена блок-схема дозатора на фиг, 2 - функциональ- ная схема устройства формирования интервала времени, на фиг. 3 - функциональная схема блока выработки управляющего воздействия; на фиг.4- фуякциональная схема логического устройства на фиг. 5 - функциональная схема блока выработки корректирующего воздействия, на фиг. 6 - диаграмма изменения выходного сигнала преобразователя массы.
Дозатор (фиг. 1) имеет бункер 1, питатель 2 с электроприводом 3, опирающийся на; преобразователь 4 массы, задатчик 5 расхода массы, блок 6 выработки управляющего воздействия, первый вход которого соединен с выходом задатчнка 5 расхода массы, второй вход - с вьгходом преобразователя 4 массы, а выход блока 6 выработки управляющего воздействия соединен с электроприводом 3 питателя 2. Кроме того, дозатор имеет устройство 7 формирования интервала времени на выдачу заданной массы материала, устройство 8 наложения эталонной массы на взвешиваемую часть дозатора, два блока 9 я О сравнения сигналов с задатчиками нижнего и верхнего уровней контролируемой массы материала, блок I5 выработки корректирующего воздействия, логическое устройство 12 и устройство 13 управления загрузкой, первый и второй входы устройства 12 соединены соответственно с выходами блоков 9 и 10 сравнения, входы которых соединены с выходом преобразователя 4 массы. Первый выхо логического устройства 12 соединен с управляющим входом устройства 8 наложения эталонной массы, второй выход логического устройства 12 соединен с з равляющим входом устройства 7 формирования интервала времени, Третий выход логического устройства 12 соединен с первым управляющим входом блока 1J выработки корректирующего во здействия, второй управляющий
5
0
5
0
5
0
5
0
5
вход которого соединен с выходом устройства 7 формирования интервала времени, вход которого соединен с выходом задатчика 5 расхода массы. При этом выход блока 1J выработки корректирующего воздействия соединен с третьим входом блока 6 выработки управляющего воздействия.
Дозатор содержит также устройство 13 управления загрузкой.
Дозатор работает следукмцим образом
Дозируемый материал из бункера I подается в технологическую линию производства шнеком питателя 2, скорость вращения которого пропорциональна величине сигнала, снимаемого с выхода блока 6 выработки управляющего воздействия. Блок 6 на основе информации, поступающей на первый, второй и третий его входы соответственно от задатчика 5 расхода массы, преобразователя 4 и от блока 1 выработки корректирующего воздействия, вырабатывает управляющий сигнал, посту- паюпщй на вход электропривода 3 и обеспечивающий равенство текущего значения величины расхода массы дозируемого материала на выходе дозатора заданному его значению задатчи- ком 5 расхода массы.
В процессе разгрузки бункера 1 при достижении количества материала в нем, равного нижнему уровню U (фиг.6) контролируемой массы, который задается задатчиком блока 10 сравнения, с выхода блока 10 поступает комавдный сигнал на первый вход логического устройства 12, на основании которого логическое устройство 12 формирует командный :сиг- нал. При этом с первого выхода устройства 12 командный сигнал поступает на вход устройства 8, осуществляющего наложение эталонной массы на взвешиваемую часть дозатора. Величина эталонной массы пропорциональна разности верхнего и нижнего уровней контролируемой массы в бункере дозатора. С второго выхода логического устройства 12 командный сигнал поступает на управляющий вход устройства 7 формирования интервала времени. На выходе устройства 7 по истечении интервала времени, необходимого для выдачи заданной массь7 материала при заданной величине ее расхода, формируется командный сигнал, который поступает на
второй управляющий вход блока 11 вы работки корректирукщего воздейст- ВИЯ. На первый управляющий вход блока П поступает-командный сигнал с третьего выхода логического устрой- ства 12, но лишь при условии достижения количества материала в бункере 1 (с учетом присоединенной-эталонной массы) нижнего уровня контролируемой массы, определяемого задатчи- ком блока 10 сравнения. Если командные сигналы с выходов устройства 7 и логического устройства 12 приходят одновременно на первый и второй управляющий входы блока П, то на выходе блока М сигнал не меняется. Если сигнала с выхода логического устройства 12 приходит на первый управляющий вход блока II с запаздыванием или опережением сигнала, который приходит с выхода устройства 7 на второй управляющий вход блока II, то на выходе блока II изменяется сформированное корректирующее воздействие и,поступая на третий вход бло- ка 6, обеспечивает устранение составляющей ошибки дозирования, обусловленной изменением коэффициента передачи преобразователя 4 массы.
Кроме того, при достижении количества материала в бункере I (с учетом присоединенной эталонной массы), нижнего уровня контролируемой массы обнуляется командный сигнал, вырабатваемый логическим устройством 12 и снимаемый с его первого -выхода, в результате чего устройство 8 ocjratecT- вляет снятие эталонной массы с взвешиваемой части дозатора. Одновременно с этим логическое устройство 12 формирует командный сигнал, снимаемый с его четвертого выхода, который поступает на вход устройства 13 управления загрузкой, осуществляющего процесс загрузки бункера 1 материалом.
Процесс загрузки бункера I матери алом заканчивается при достижении количества материала в нем, равного верхнему уровню U, (фиг. 6) контро- лируемой массы, заданному в блоке 9 сравнения, выходной сигнал которого поступает на второй вход логичес кого устройства 12-. При этом командный сигнал на четвертом выходе логического устройства 12 обнуляется, процесс загрузки бункера 1 материалом прекращается и цикл работы
Т5
20
j ю 25
30
5
0
5
O 5
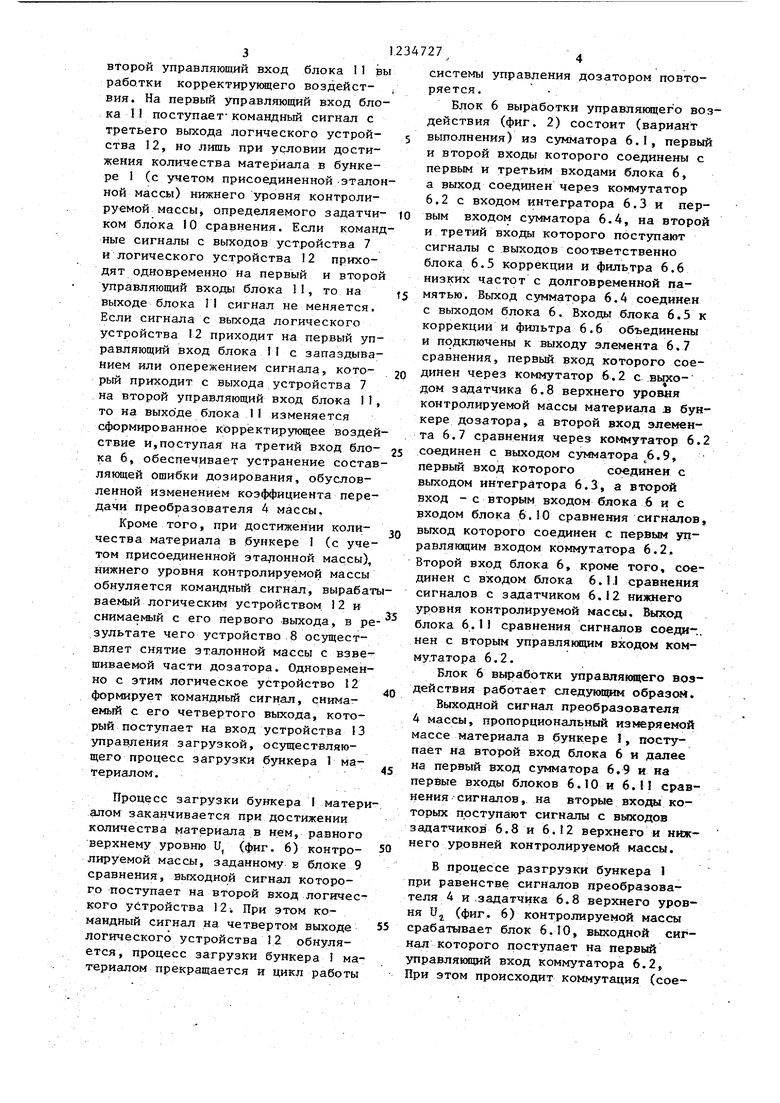
системы управления дозатором повторяется. Блок 6 выработки управляющего воздействия (фиг. 2) состоит (вариант выполнения) из сумматора 6.1, первый и второй входы которого соединены с первым и третьим входами блока 6, а выход соединен через коммутатор 6.2 с входом интегратора 6.3 и первым входом сумматора 6.4, на второй и третий входы которого поступают сигналы с выходов соответственно блока 6.5 коррекции и фильтра 6.6 низких частот с долговременной памятью. Выход сумматора 6.4 соединен с выходом блока 6. Входы блока 6.5 к коррекций и фильтра 6.6 объединены и подключены к выходу элемента 6.7 сравнения, первый вход которого соединен через коммутатор 6.2 с выходом задатчика 6.8 верхнего уровня контролируемой массы материала s бункере дозатора, а второй вход элемента 6.7 сравнения через коммутатор 6.2 соединен с выходом сумматора 6.9, первый вход которого соединен с выходом интегратора 6.3, а второй вход - с вторым входом блока 6 и с входом блока 6.10 сравнения сигналов, выход которого соединен с первым управляющим входом коммутатора 6.2. Второй вход блока 6, кроме того, соединен с входом блока 6.1-1 сравнения сигналов с задатчиком 6.12 нижнего уровня контролируемой массы. Выход блока 6.1 1 сравнения сигналов среди-.. нен с вторым управляющим входом коммутатора 6.2.
Блок 6 выработки управлякщего воздействия работает следующим образом.
Выходной сигнал преобразователя 4 массы, пропорциональный измеряемой массе материала в бункере 1, поступает на второй вход блока 6 и далее на первый вход сумматора 6,9 и на первые входы блоков 6.10 и 6,11 сравнения сигналов, на вторые входа которых поступают сигналы с выходов 3адатчиков 6.8 и 6.12 верхнего и нижнего уровней контролируемой массы.
В процессе разгрузки бункера при равенстве сигналов преобразователя 4 и .задатчика 6.8 верхнего уровня Uj (фиг. 6) контролируемой массы срабатывает блок 6.10, выходной сигнал которого поступает на первый управляющий вход коммутатора 6.2, При этом происходит коммутация (соединенйе) вькрда сумнатора 6.1 с вхо дом интегратора 6.3, выхода сумматора 6.9 с первым входом элемента 6.7 сравнения, второй вход которого соединяется с выходом задатчика 6.8.
С выхода сумматора 6.1 снимается сигнал, равный сигналов с выходов задатчика 5 расхода массы и блока 11 выработки корректирующего воз- действия, т.е. сигнал, пропорциональный скорректированному значению за- данного расхода массы.
С выхода сумматора 6.9 снимается сигнал, равный сумме сигналов, про- порциональных соответственно скорректированной массе материала, которая должна быть выдана дозатором на данный момент и текущ ш массы материала в бункере 1.
На выходе элемента 6, 7 сравнения сигналов задатчика 6.8 и сумматора 6.9 вырабатывается сигнал ошибки дозирования, который поступает на входы корректирующего блока 6.5 и фильтра 6.6 низких частот с долговременной памятью. При этом мгновенные отклонения расхода массы на выходе дозатора от заданной его величины устраняются за счет управляющего воз действия, снимаемого с выхода бло- .ка 6.5 и поступающего на первый вход сумматора 6.4 и далее на вход электропривода 3. В результате фильтрации текущего значения ошибки дозирования фильтром 6.6 на его выходе вырабатывается величина управляющего воздействия, которая в сумме с величиной сигнала, снимаемого с выхода сумматора 6,1 подается на вхо электропривода 3 и обеспечивает равенство среднего значения величины расхода массы его заданной величине
В процессе разгрузки бункера 1
при дости жении количества материала в нем, равного нижнему уровню U. (фиг. 6) контролируемой массы, сра- батывачгт блок 6.11 сравнения сигнало преобразователя 4 массы и задатчика 6.12. Блок 6.1, срабатьшая, выдает командный сигнал на второй управляющий вход коммутатора 6.2, который разрывает связи между выходом сумматора 6.1 и входом интегратора 6.3, выходом сумматора 6.9 и первым вхо- дом элемента 6.7 сравнения, вторым входом элемента 6.7 сравнения и выходом задатчика 6.8. При этом ошибка
to
5 20
25 Q
5
0
5
дозирования на выходе элемента 6.7 становится равной нулю, сигнал на выходе блока 6.5 также становится равным нулю, а на выходе фильтра 6.6 величине, которая в сумме с величиной сигнала, снимаемого с выхода матора 6.1, обеспечивает равенство средней величины расхода массы на выходе дозатора его заданной величине.
После завершения процесса загрузки бункера 1 материалом или наложения эталонной массы на взвепшваемую часть дозатора, что определяется логическим устройством 12, цикл работы блока 6 выработки управляющего воздействия повторяется..
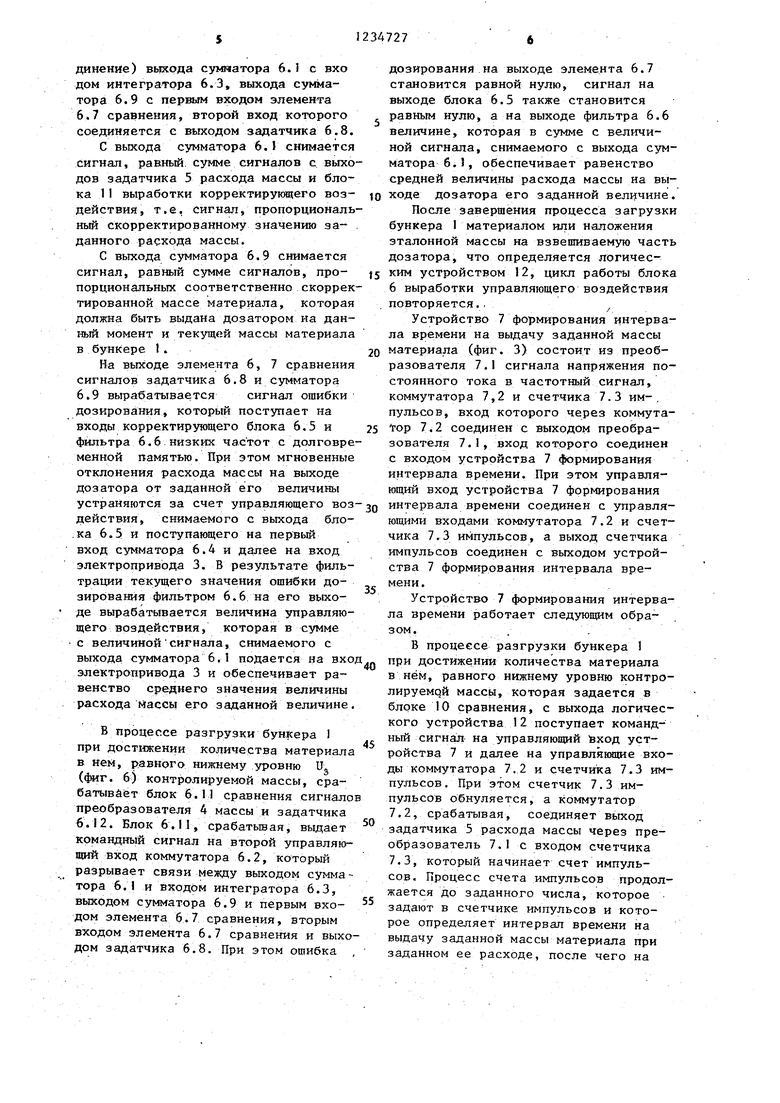
Устройство 7 формирования интервала времени на выдачу заданной массы материала (фиг. 3) состоит из преобразователя 7.1 сигнала напряжения постоянного тока в частотный сигнал, коммутатора 7,2 и счетчика 7.3 им-, пульсов, вход которого через коммутатор 7.2 соединен с выходом преобразователя 7.1, вход которого соединен с входом устройства 7 формирования интервала времени. При этом управляющий вход устройства 7 формирования интервала времени соединен с управляющими входами коммутатора 7.2 и счетчика 7.3 импульсов, а выход счетчика импульсов соединен с выходом устройства 7 формирования интервала времени .
Устройство 7 формирования интервала времени работает следующим образом.
В процессе разгрузки бункера 1 при достижении количества материала в нём, равного нижнему уровню контро- лиpyeмQй массы, которая задается в блоке 10 сравнения, с выхода логического устройства 12 поступает командный сигнал на управляющий йход устройства 7 и далее на управляющие входы коммутатора 7.2 и счетчика 7.3 импульсов. При этом счетчик 7.3 импульсов обнуляется, а коммутатор
7.2,срабатывая, соединяет выход задатчика 5 расхода массы через преобразователь 7.1 с входом счетчика
7.3,который начинает счет импульсов. Процесс счета импульсов продолжается до заданного числа, которое задают в счетчике импульсов и которое определяет интервал времени на выдачу заданной массы материала при заданном ее расходе, после чего на
7
выходе счетчика 7.3 формируется командный сигнал, поступающий на выхо устройства 7 и далее, на второй управляющий вход блока 1I выработки корректирующего воздействия.
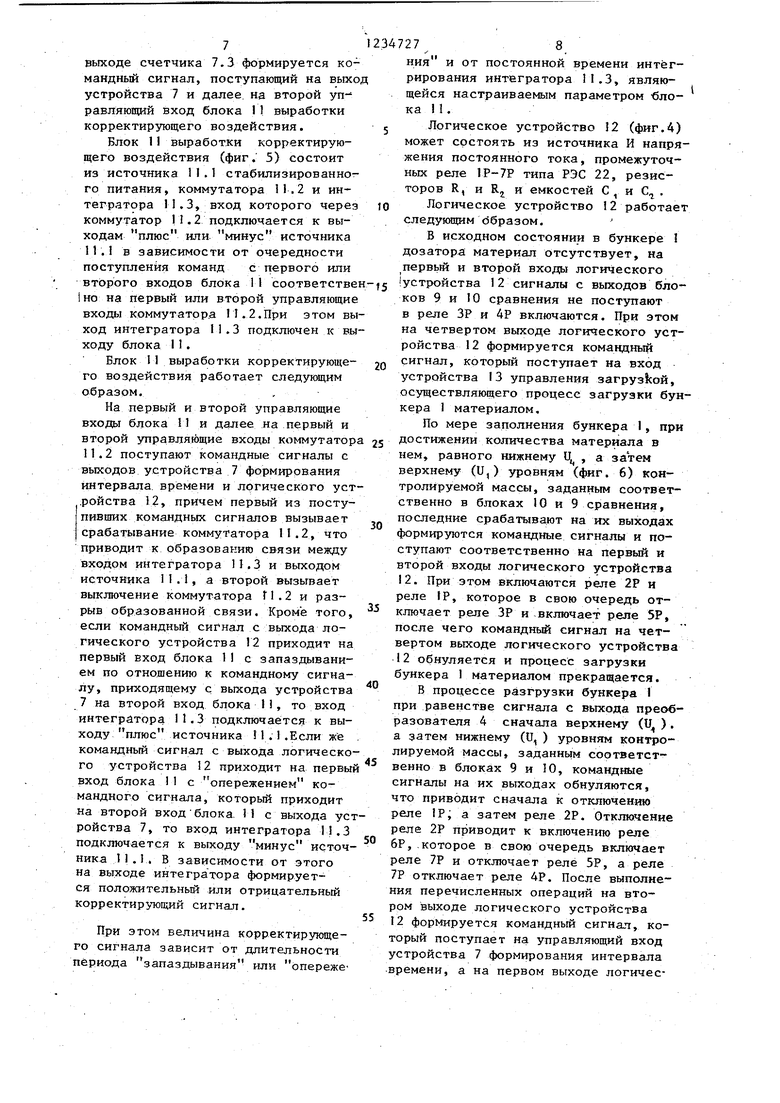
Блок 11 выработки корректирующего воздействия (фиг. 5) состоит из источника П.1 стабилизированного питания, коммутатора 11.2 и интегратора 11.3, вход которого через коммутатор 1I.2 подключается к выходам плюс или минус источника
11.1в зависимости от очередности поступления команд с первого или второго входов блока 11 соответстве но на первый или второй управляющие входы коммутатора II.2.При этом выход интегратора 11.3 подключен к выходу блока II.
Блок 11 выработки корректирующего воздействия работает следукацим образом..
На первый и второй управляющие входы блока 11 и далее на первый и второй управляющие входы коьшутатор
11.2поступают командные сигналы с выходов устройства 7 формирования интервала, времени и логического устройства 12, причем первый из поступивших командных сигналов вызывает срабатывание коммутатора 11.2, что приводит к образованию связи между входом интегратора П.З и выходом источника 11.1, а второй вызывает выключение коммутатора ГI.2 и разрыв образованной связи. Кроме того, если командный сигнал с выхода логического устройства 12 приходит на первый вход блока 11 с запаздыванием по отношению к командному сигналу, приходящему с выхода устройства
7 на второй вход блока I1, то вход интегратора 11.3 подключается к выходу плюс источника 11.1.Если ж е командный сигнал с выхода логического устройства 12 приходит на первы вход блока 11 с опережением командного сигнала, который приходит на второй вход блока. М с выхода устройства 7, то вход интегратора 1.3 подключается к выходу минус источника 11.1, В зависимости от этого на выходе интегратора формируется положительный или отрицательный корректирующий сигнал.
При этом величина корректирующего сигнала зависит от длительности периода запаздывания или опереже
8
ния и от постоянной времени интегрирования интегратора 11.3, являю- . щейся настраиваемым параметром блока I 1.
с Логическое устройство 12 (фиг.4) может состоять из источника И напряжения постоянного тока, промежуточных реле 1Р-7Р типа РЭС 22, резисторов R, и RJ и емкостей С, и С. JO Логическое устройство 12 работает следующим образом.
В исходном состоянии в бункере 1 дозатора материал отсутствует, на первьй и второй входы логического ,е (устройства 12 сигналы с выходов блоков 9 и 10 сравнения не поступают в реле 3 и 4Р включаются. При этом на четвертом выходе логического устройства 12 формируется командный 2Q сигнал, который поступает на вход устройства 13 управления зaгpyзkoй, осуществляющего процесс загрузки бункера 1 материалом.
По мере заполнения бункера 1, при 25 достижении количества материала в нем, равного нижнему Ц , а затем верхнему (и,) уровням (фиг. 6) контролируемой массы, заданньгм соответственно в блоках 10 и 9 сравнения, последние срабатывают на их выходах формируются командные сигналы и поступают соответственно на первый и второй входы логического устройства 12. При этом включаются реле 2Р и реле JP, которое в свою очередь от- 5 ключает реле ЗР и включает реле 5Р, после чего командный сигнал на четвертом выходе логического устройства 12 обнуляется и процесс загрузки бункера 1 материалом прекращается.
В процессе разгрузки бункера 1 при равенстве сигнала с выхода преобразователя 4 сначала верхнему (U ). а затем нижнему (U, ) уровням контролируемой массы, заданным соответст- венно в блоках 9 и JO, командные сигналы на их выходах обнуляются, что приводит сначала к отключению репе IP; а затем реле 2Р. Отклкмение реле 2Р приводит к включению реле 6Р, .которое в свою очередь включает реле 7Р и отключает реле 5Р, а реле 7Р отключает реле 4Р. После выполнения перечисленных операций на втором выходе логического устройства 5 12 формируется командный сигнал, который поступает на управляющий вход устройства 7 формирования интервала времени, а на первом выходе логичес30
0
кого устройства 12 формируется командный сигнал, поступающий на вход устройства 8, осуществляющего наложение эталонной массы на взвешивав- мую часть дозатора. При этом сигнал на выходе преобразователя 4 возрастает и при прохождении снанала нижнего {U( ), а затем верхнего (Ц ) уровней контролируемой массы, вызы- вает срабатывание блоков 10 и 9 cpais нения. На выходах блоков 10 и 9 формируются командные сигналы и, поступая соответственно на второй и первы входы логиче.ского устройства 12, включают реле 2Р,. а затем реле IP, которое отключает реле 6Р. Отключени реле 6Р свидетельствует о факте наложения эталонной массы на взвешиваемую часть дозатора.
В процессе дальнейшей разгрузки бункера 1 при равенстве сигнала с выхода преобразователя 4 сначала верхнему (U, ), а затем нижнему (у ) .уровням контролируемой массы, заданным соответственно в блоках 9 и Ю, командные сигналы на их выходах обнуляются, что приводит сначала к отключению реле IP, а затем реле 2Р. Отключение реле 2Р приводит к включению реле ЗР, которое включает реле 4Р и отклю1чает peiie 7Р. Отключение реле 7Р приводит к тому, что командные сигналы на втором и. первом выхо- дах логического устройства 12 обнуляются, а взвешиваемая часть дозатора освобождается от присоединенной эталонной массы. Кроме того, отключение реле 7Р свидетельствует о фак- те окончания процесса выгрузки массы материала, равной присоединенной эталонной массе, и приводит, с одной стороны, к формированию на третьем выходе логического устройства 12 ко- мандного -сигнала, поступающего на первый управляющий вход блока 11 вьфаботки корректирующего воздейст- .вия, и, с другой стороны, к формированию на четвертом выходе логическо- го устройства 12 командного сигнала, поступающего на вход устройства 13 управления загрузкой, осуществляющего процесс загрузки бункера 1 материалом, и цикл работы (Тц, фиг. 6) дозатора повторяется.
Формула изобретения
Весовой дозатор непрерывного действия , содержащий питатель с электроприводом, опиракяцийся н.а преобразователь массы в электрический сигнал, устройство управления загрузкой, блок выработки управляющего воздействия, первый вход которого соединен с выходом задатчика расхода массы, второй
вход - с выходом преобразователя массы в электрический сигнал, а выход - с электроприводом питателя, и два элемента сравнения сигналов с задатчиками верхнего и нижнего уровня контролируемой массы материала, входы которых соединены с выходом преобразователя массы в электрический сигнал, отличающийся тем что, с целью повышения точности за счет устранения составляющей ошибки, обусловленной изменением коэффициента передачи преобразователя массы в электрический сигнал, в него введены устройство формирования интервала времени, устройство наложения эталонной массы, блок выработки корректирующего воздействия и логическое устройство, причем первый и второй входы логического устройства соединены соответственно с выходами первого и второго элементов сравнения, первый выход логического устройства соединен с входом устройства наложения эталонной массы, второй выход - с первым входом устройства формирования интервала времени, третий выход - с первым входом блока выработки корректирующего воздействия, второй вход которого соединен с выходом устройства формирования интервала времени, второй вход которого соединен с выходом задатчика расхода массы, выход блока выработки корректирующего воздействия соединен с третьим входом блока выработки управляющего воздействия, а устройство управления загрузкой подключено к четвертому выходу логического устройства.
i 7,1
7.2
э-о-в-ч
фиг. 2
7J
г-С I
(риг. 3
фш-
71
П2
11.3 I
г-п
фиг. 5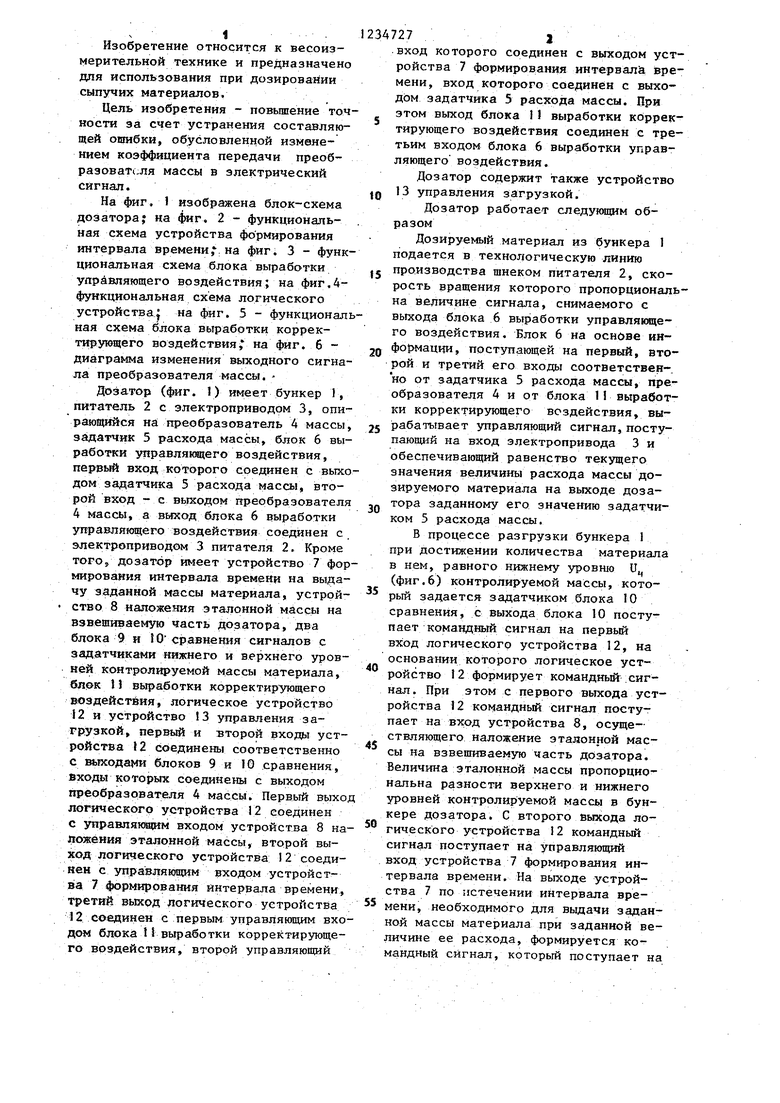
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор сыпучих материалов | 1985 |
|
SU1317286A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1255867A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1229584A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1108335A2 |
| Дозатор сыпучих материалов | 1986 |
|
SU1432338A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278600A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
Изобретение относится к области весоизмерительной техники и может быть использовано при дазировании сыпучих материалов. Цель изобретения- повышенке точности дозато за:. Устройство содержит бункер 1, питатель 2 с электроприводом 3, преобразователь 4 массы, задатчик 5 расхода массы, блок 6 выработки управляющего действия. Дозатор имеет также устройство 7 формирования интервала времени на выдачу заданной массы материала, устройство 8 налозкения эталонной массы на взвешиваемую часть дозатора, блоки 9, 10 сравнения сигналов с задатчиками нияснего и верхнего уровней контролируемой массы материала, блок II выработки корректирующего воздействия, логичес- кое устройство 12 и устройство 3 управления загрузкой. Введение новых -элементов и обра з 1вание новых связей между элементами устройства позволяет устранить составляющую ошибки, обусловленной измененкем . коэффициента передачи преобразователя массы в электрический сигяал. 6 ил. СО с ho Од 4а 41 IS5 М
Составитель в.Ширшов Редактор Л. По вхан Техред Л. Сердюкова KoppeicTop В.Бутяга
Заказ 2977/46 Тираж 705Подписное
ВНИИПИ Государетвенного комитета GCGP .
по делам изорретений и открытий 113035, Москва, Ж-35, Раушская иаб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
ф1К.&
| Устройство для лечения маститов у животных | 1980 |
|
SU952265A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
