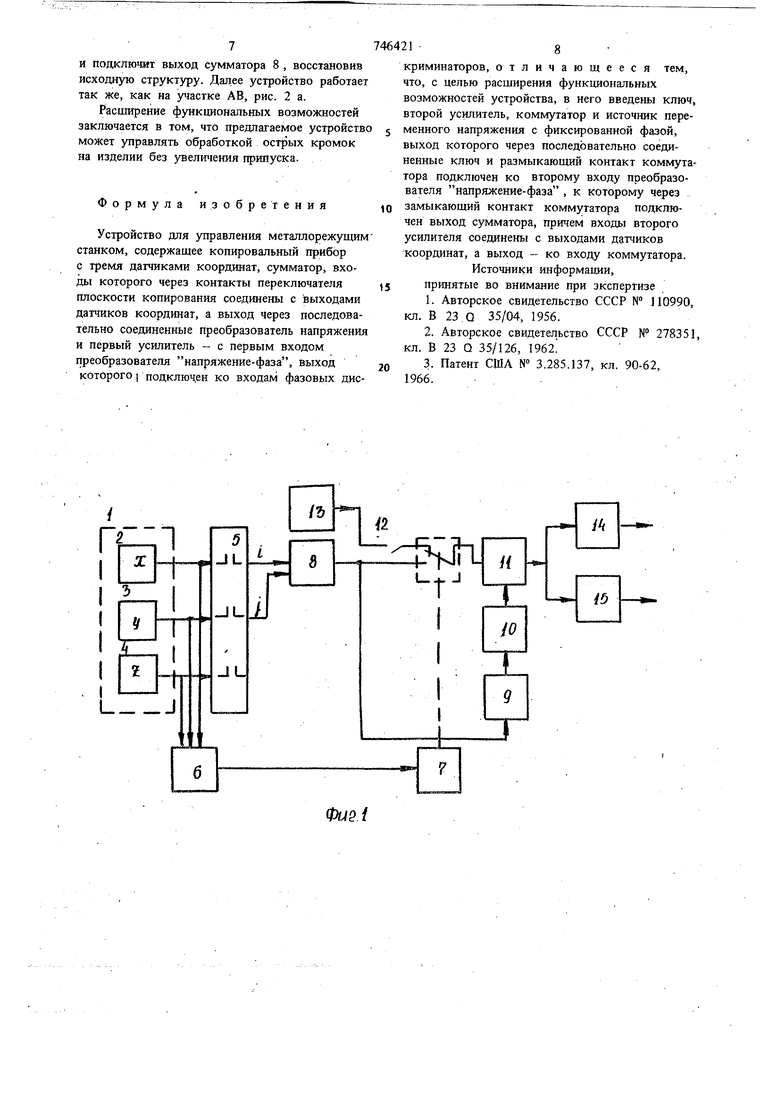
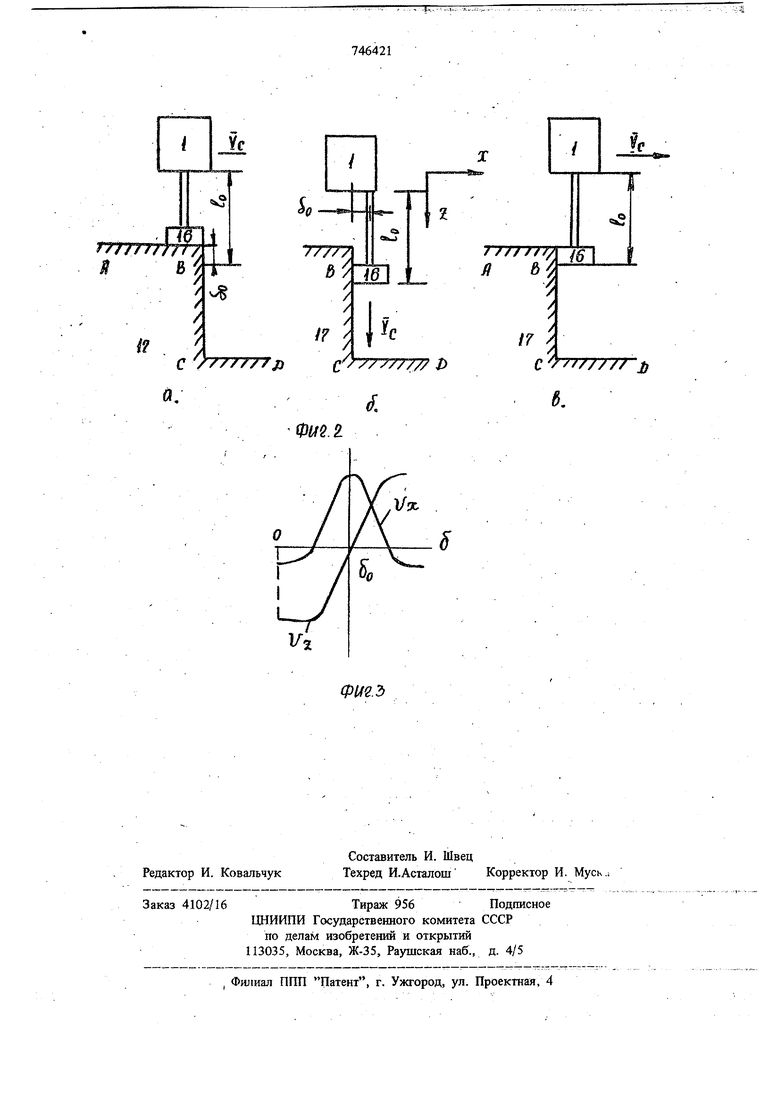
Изобретение относится к автоматизации, про изводства и может использоваться в системах управления при обработке штампов. Известно электромеханическое двухкоординатное следящее устройство для фрезерования ш копиру деталей с криволинейным замкнутым контуром, которое содержит копировальный тфибор с индуктивным датчиком, входной усилитель копировальной системы, подключен ный к выходу датчика. Выход усилителя соеди иен с вращающимся трансформатором, выходны обмотки которого через выходной усилитель копировальной системы соединены с двумя электромеханическими усилителями. Команды с этих усилителей поступают на электродвигате ли продольной и поперечной подач. Сигнал индуктивного датчика используется одновремен но для поворота вектора подачи в соответствии с направлением контура и корректированием ошибки слежения путем подачи сигнала от дат чика на обмотку статора вращающегося трансформатора, управляющего органами подачи, и ш привод вращения его ротора l. Однако, при изготовлении штампов, когда возникает необходимость воспроизведения острых кромок, неизбежно происходит отрыв пальца от копира, что определяется принципом действия современных копировальных приборов и не зависит от быстродействия систем управления копированием. Для продолжения процесса обработки стано шик должен подвести палец копировального прибора к копиру вручную и включить автоматический режим копирования. Это гфиводит к большим потерям станочного времени. Таким образом, недостаткам этого устройства является потеря информации о направлении подачи при отрыве пальца копировального прибора от копира. Известное устройство - трехкоординатный копировальный прибор, соединенный с блоком формирования сигналов управления каждым гриводом подачи через сумматор сигнало копировального прибора и блок сравнения выходного шгнала сумматора с опорным сигналом, содержащее два фазочувствительных усилителя, питаемых напряжениями переменного тока, сдвинутыми 3 между собой на 90 эл-град. Выбор двух рабочи органов из трех производится блоками коммута ции в соответствии с плоскостью копирования. Копировальный прибор выдает информацию в в де трех сигналов, отображающих перемеще1гае пальца копировального прибора по нормали к копиру в проекциях на координатные оси. Сумматор выполнен в виде алгебраического блока с делителями, обеспечивающими теоретически мини мальные отклонения полученной суммы от расчетной геометрической, и геометрического блока, суммирующего сигналь копировального прибора. Текущий угол копирования формирует ся в виде сдвига по фазе. суммарного напряжения двух датчиков, измеряющих составляющие перемещения пальца в плоскости копирования по отношению к напряжению одного из нюс 2 Недостатком такого устройства является потеря информации о направлении подачи при отрьгее пальца копировального прибора от к6гшра. Наиболее близким техническим рещением является трехмерное копировальное устройство, содержащее копировальный прибор с тремя датчиками координат по осям X, У, Z, переклю чатели для соединения любых двух датчиков со средствами управления для осуществления относительного перемещения копира и чувствительного органа в .соответствующих (выбранных) направлениях, а также усилительно-преобразовательные блоки. Выходы датчиков соединены через один из переключателей выбора шоскости копирования с усилительно-преобразовательными блоками, выходы которых подключены ко входам фазовых дискриминаторов. Выходы фазовь1Х дискриминаторов через второй переключатель выбора плоскости копиро вания соединены со входами приводов подач. При относительном- перемещении копироваль ного прибора и копира в трех датчиках вырабатываются сигналы, соответствующие отклонениям в трех взаимноперпендикулярных направлениях. Через переключатели выбора плоскости копиррватш и калибрующий блок эти сигналы тосылаются в вычислительный блок. В вычислительном блоке сигналы суммируются и вырабатъгоаются сигналы напряжения, амплитуды которых пропор1щональны отклонению щупа по соответствующей оси. Эти сигналы подаются на входы фазовых дискриминаторов, выходы которых через второй переключатель выбора тоскости копирования соединены с входами тфиводов подач. Кроме того, в вычислительном блоке вырабатывается сигнал ощибки копирования и подается на отдельные демодуляторы, входы которых также соединены со входами 1ФИВОДОВ подач. При появлении ошибки, составляющие сигнала ошибки суммируются на 21 входах приводов с основными сигналами и вектор скорости копирования меняется в сторону уменьщения ощибки копирования 3 Недостаток устройства, потеря работоспособности при отрыве пальца копировального прибора от копира. Цель изобретения - расширение функциональных возможностей путем автоматического изменения структуры устройства при отрыве пальца котшроваЛьного прибора от копира. Поставлегшая цель достигается тем, что в устройство для управления металлорежущим станком, содержащее копировальный прибор с тремя датчиками координат, сумматор, входы которого через контакты переключателя плоскости копирования соединены с выходами датчиков координат, а выход - через последовательно соединенные преобразователь напряжения и первый усилитель - с первым входом пре- , образователя напряжение-фаза, выход которого подключен ко входам фазовых дискриминаторов, введены ключ, второй усилитель, коммутатор и источник переменного напряжения с фиксированной фазой, выход которого через последовательно соединенные ключ и размыкающий контакт коммутатора подключен ко второму входу преобразователя напряжение-фаз а, к которому через замыкающий контакт коммутатора подключен выход сумматора, причем входы второго усилителя йоединень с выходами датчиков координат, а выход - ко входу коммутатора.. На фиг. 1 изображена структурная схема предлагаемого устройства для управления металлорежущим станком;, на фиг. 2 а, б, в показан процесс отрыва пальца копировального прибора от копира; на фиг. 3 приведены выходные характеристики предлагаемого устройства при отключенном коммутаторе и включенном ключе. Устройство (см фиг. 1) содержит копировальный прибор 1, датчик 2 координат по оси X, датчик 3 координат по оси У, датчик 4. координат по оси Z, переключатель 5 плоскости копирования, второй .усилитель 6, коммутатор 7, сумматор 8, преобразователь 9 напря- . жения, усилитель 10, преобразователь И нагряжейие-фаза, ключ 12, источник 13 переменного напряжения с фиксированной фазой и фазовьте дискриминаторы 14 и 15, палец 16 копировального прибора 1, и копир 17 (см. фиг. 2). Устройство работает следующим образом. При относительном перемещении копировального прибора 1 и копира в 2, 3, 4 вырабатываются сигналы, пропорциональные отклонению пальца и зависящие от угла копирования. Через контакты переключателя 5 57 выходные напряжения датчиков 2 и 4 (что соответствует тшоскости X Z) подаются на вход сумматора 8, где производится геометрическое суммирование сигналов. Фаза выходного напряжения сумматора является функцией угла копирования, а амплитуда выходного напр жения сумматора пропорциональйа . отклонению пальца копировального прибора по нормали к поверхности копира. Одновременно выходные сигналы датчиков 2, 3, 4 поступают на вход второго усилителя 6 который имеет большой коэффициент усиления. Выходной сигнал усилителя 6 возбуждает коммутатор 7 и замыкает контакт коммутатора. Выходной сигнал сумматора 8 через замыкающий контакт поступает на вход 11. На первый вход преобразователя 11 напряжение-фаза выходной сигнал сумматора 8 подается через последовательно соединенные преобразователь 9 напряжения и первый усилитель 10. Преобразователь 9 напряжения вырабатывает напряжение постоянного тока, величина которого пропорциональна отклонению пальца копировального прибора. На усилителе 10 производится сравнение сигнала текущего отклонения с заданной величиной отклонения пальца копировального прибора по нормали к поверхности копира от свободного положения В о- Эта величина 5 носит название начального рассогласования, а сигнал с выхода 10 пропорционален ошибке копирования. При отсутствии ошибки копирования входной сигнал преобразователя 11 напряжение-фаза имее гостоянную амплитуду, а фаза пропорвдональНа углу копирования. Далее выходной сигнал преобразователя 11 поступает на входы фазовых дискриминаторов 14 и 15, опорные напряжения у которых находятся в квадратуре. Дискриминаторы вырабатывают сигналь для управления приводами подач по соответствующим координатам. При появлении ошибки копирования появляется сигнал на выходе 10 и корректирует фазу выходного сигнала преобразователя 11 таким образом, что ошибка копирования уменьшается. При отрыве пальца копировального прибора от копира выходные напряжения дачгчиков 2, 3, 4 становятся равными нулю и информаци об относительном расположении копира и копи ровального прибора (и о форме копира) теряе ся. В этом случае необходимо автоматически останавливать станок, чтобы исключить произвольное движение рабочих органов станка под действием помех. Обычно отрыв пальца от ко пира происходит вследствие неправильного выбора режима или при неисправности системы. Однако при изготовлении острых кромок штампов отрыв пальца от копира неизбежен. Такой случай изображен на фиг. 2, где Vj. - вектор скорости копирования. Копирова ние происходит в плоскости X Z. Копировальный прибор должен иметь торцовой палец с острыми кромками, а копир - нулевой радиус кривизны в месте излома поверхности. При копировании участка АВ, фиг. 2 а, устройство работает как описано выше, причем палец 16 отклонен на величину SQ вверх по оси Z. При копировании вертикального участка ВС (фиг. 2 б) палец 16 смешен в радиальном направлении по оси X на величину 5ц, а смещение по Z равно нулю. По окончанию участка АВ палец 16 под действием пружины копировального прибора (на фиг. не показана) смещается вниз до свободного положения EQ (фиг. 2 в) выходные сигналы датчиков 2, 3, 4 становятся равными нулю, так как смещение пальца 16 в осевом и радиальном направлении отсутствует. Если ключ 12 разомкнут, то копировальный прибор некоторое время перемещается в направлении V из-за инерционности приводов и затем останавливается, так как устройство не получает информации о необходимом направлении движения. Аналогичное явление будет происходить и при даижении вверх по участку ВС, причем отрыв происходит независимо от быстродействия устройства. Как только выходные сигналы датчиков 2, 3, 4 становятся равными нулю, выходное напряжение усилителя 6 тоже уменьшается до нуля и коммутатор 7 обесточивается. Если замкнут контакт ключа 12, то ко входу преобразователя 11 подключается выход источника с фиксированной фазой 13. На второй вход И действует сигнал полной ошибки, соответствующей по знйку отрыву пальца 16 от копира 17, а по величине соответствующий SQ. Выходные характеристики предлагаемого устройства при обесточенном коммутаторе 7 и включенном ключе изображень на фиг. 3. При отрыве устройство вырабатывает сигналы, соответствующие Максимальной скорости по оси Z (вниз на фиг. 2 в) и небольшой, порядка 10% от максимальной скорости по оси X, обратной по отношению к первоначальному зэданному направлению. Таким образом, копировальный прибор и соответственно фреза начинают перемещаться вниз и назад на копир. Соприкосновение с копиром может произойти как на участке ВС, (фиг. 2 в), так и на участке СД, в зависимости от протяженности участка ВС и величины DX, по отношению к (фт. 3). Когда палец 16 войдет в соприкосновение с копиром 17, на выходе хотя бы одного из датчиков 2, 3, 4 появится напряжение, которое через усилитель 6 включит коммутатор 7. Коммутатор отключит от входа преобразова,теля 11 источник с фиксированной фазой 13
и подключит выход сумматора 8 , восстановив исходную структуру. Далее устройство работает так же, как на участке АВ, рис. 2 а.
Расширение функциональных возможностей заключается в том, что предлагаемое устройство может управлять обработкой острых кромок на изделии без увеличения припуска.
Формула изобретения
Устройство для управления металлорежущим станком, содержащее копировальный прибор с тремя датчиками координат, сумматор, входы которого через контакты переключателя плоскости копирования соединены с выходами датчиков координат, а выход через последовательно соединенные преобразователь напряжения и первый усилитель - с первым входом преобразователя напряжение-фаза, выход которого) подключен ко входам фазовых дискриминаторов, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены ключ, второй усилитель, коммутатор и источник переменного напряжения с фиксированной фазой, выход которого через последовательно соединенные ключ и размыкающий контакт коммутатора подключен ко второму входу преобразователя напряжение-фаза , к которому через замыкающий контакт коммутатора подключен выход сумматора, причем входы второго усилителя соединены с выходами датчиков координат, а выход -- ко входу коммутатора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 10990, кл. В 23 Q 35/04, 1956.
2.Авторское свидетел ьство СССР № 278351 кл. В 23 Q 35/126, 1962
3.Патент США № 3.285.137, кл. 90-62, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1972 |
|
SU326556A1 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
| Копировальное следящее устройство для управления станком | 1987 |
|
SU1411705A2 |
| Копировальное устройство | 1976 |
|
SU602350A1 |
| Двухкоординатное копировальное устройство | 1976 |
|
SU572366A1 |
| Копировальная система | 1979 |
|
SU841916A1 |
ФЫР/
Фиг.г
