Предлагаемый способ управления может быть использован в космической технике при организации перелетов транспортного космического корабля (ТКК) между двумя орбитальными станциями (ОС), одна из которых находится на орбите планеты с атмосферой, например МКС, а другая находится на орбите других небесных тел, например Луны.
Известен способ управления, выбранный в качестве аналога, в котором используется межорбитальный буксир (МБ), находящийся в составе околоземной ОС. С земного космодрома стартует ракета-носитель (РН) и выводит на опорную орбиту грузовой контейнер (ГК), несущий полезную нагрузку. МБ расстыковывается от ОС и переходит на орбиту ГК. После стыковки с ГК МБ выполняет обратный перелет к ОС. В качестве МБ рассматривался многофункциональный многоразовый межорбитальный буксир «Паром» [1. «РКК «Энергия»: Концепция развития российской пилотируемой космонавтики», ж. Новости Космонавтики №7, 2006, с. 16-13].
Основным недостатком такого способа управления является то, что эта система предназначена для доставки полезного груза в узком околоземном слое от опорной орбиты выведения до орбиты ОС и не может быть использована для перелетов между космическими станциями, находящимися на удаленных орбитах.
Известен способ управления транспортной космической системой, выбранный в качестве прототипа, включающий приложение к транспортному космическому кораблю после его отстыковки от орбитальной станции, находящейся на круговой орбите высотой НОС вокруг планеты с атмосферой, заданных импульсов для его перелета в заданную точку космического пространства и последующего обратного перелета к орбитальной станции. Такой способ управления был использован в 1986 году во время перелетов КК «Союз-Т15» между ОС «Мир» и ОС «Салют-7 [2. В.Е. Гудилин, Л.И. Слабкий «Ракетно-космические системы (История. Развитие. Перспективы)». М., 1996].
Недостатком этого способа является то, что из-за ограниченных энергетических возможностей КК перелет был возможен только при условии нахождения обеих ОС на близких по высоте орбитах.
Техническим результатом изобретения является возможность перелетов между ОС, находящейся на орбите планеты с атмосферой, и ОС, расположенной на орбите другого небесного тела или, например на галоорбитах в окрестностях точек либрации (Лагранжа).
Технический результат достигается благодаря тому, что в способе управления транспортной космической системой, включающем приложение к транспортному космическому кораблю после его отстыковки от орбитальной станции, находящейся на круговой орбите высотой НОС вокруг планеты с атмосферой, заданных импульсов для его перелета в заданную точку космического пространства и последующего обратного перелета к орбитальной станции, отличающемся тем, что перед приложением K1 заданных импульсов производят приложение к транспортному космическому кораблю импульсов сближения для последующей стыковки с модулем разгонных блоков, находящимся на опорной орбите планеты, отдельной ракетой-носителем, после чего к образованной в результате стыковки связке прикладывают К2 заданных импульсов, где К2=1, 2…, при этом K1=K2+1, К2+2…, с последовательным отделением каждого разгонного блока от упомянутой связки по мере выработки его топлива, а при обратном перелете к упомянутой связке прикладывают отлетный импульс Vотл для прохождения на заданном расстоянии от планеты с последующим выходом транспортного космического корабля за счет аэродинамического торможения на эллиптическую орбиту вокруг планеты, выполняют заданные изменения параметров орбиты транспортного космического корабля в процессе его последовательных прохождений на заданном расстоянии от планеты, для чего после каждого прохождения апогея орбиты прикладывают корректирующий импульс Vкор, вплоть до выполнения условия Нα=НОС, где Нα - высота апогея орбиты транспортного космического корабля, после чего в апогее орбиты прикладывают импульс перехода Vпер на круговую орбиту НОС.
Предлагаемый способ рассмотрим на примере ОС, находящейся на околоземной орбите. Технический результат в предлагаемом способе управления достигается за счет того, что отдельной ракетой-носителем (РН) на околоземную орбиту выводится модуль с разгонными блоками (РБ), способными выполнить импульсы перевода полезной нагрузки в заданную точку космического пространства, например на орбиты других небесных тел. ТКК, находящийся в составе околоземной ОС, расстыковывается с ОС, а затем сближается и стыкуется с модулем с РБ, образовывая связку. Используя энергетические возможности модуля с РБ, к связке прикладывается отлетный импульс для ее перевода на траекторию перелета, например, к другой ОС. РБ по мере выработки в них топлива отделяются от образованной связки. По достижении орбиты другой ОС выполняется тормозной импульс, связка переходит на орбиту ОС и стыкуется с ней. Для обратного перелета ТКК к околоземной ОС выполняется отлетный импульс Vотл. При этом обратный перелет осуществляется не на орбиту околоземной ОС, а на орбиту, проходящую на заданном расстоянии от Земли. Такой подход выбран из следующих соображений. На подлете к Земле скорость ТКК соответствует 2-й космической скорости, т.е. около 11.2 км/сек, а круговая скорость на околоземной орбите соответствует 1-й космической скорости, т.е. около 8 км/сек. Таким образом, для перехода на круговую орбиту ОС необходим тормозной импульс величиной около 3.2 км/сек. Для выполнения этого импульса, сопоставимого по величине с отлетным импульсом, очевидно потребуется очень большой модуль с РБ, выводимый сверхтяжелой РН. Соответственно, такая транспортная система будет иметь слишком большую размерность и будет малоэффективна. Чтобы снизить скорость ТКК для перехода на орбиту околоземной ОС без выполнения тормозного импульса, предлагается использовать последовательные прохождения ТКК в атмосфере Земли на заданном расстоянии от Земли. Отлетный импульс Vотл обеспечивает прохождение на заданном расстоянии от Земли с последующим выходом транспортного космического корабля за счет аэродинамического торможения на эллиптическую орбиту вокруг Земли. Помимо этого, при первом пролете вокруг Земли, за счет гравитационного маневра можно скорректировать и другие параметры орбиты ТКК, например положение и наклонение плоскости орбиты для обеспечения оптимальных условий при последующем сближении и стыковке ТКК с околоземной ОС. В апогее образованной эллиптической орбиты Нα выполняется корректирующий импульс Vкор, регулирующий высоту перигея орбиты для необходимого снижения орбитальной скорости при очередном прохождении атмосферы Земли. Предполагается, что в зависимости от возможностей теплозащитного покрытия (ТЗП) ТКК высота перигея орбиты ТКК составит 80-90 км. Описанная последовательность прохождений с выполнением корректирующего импульса в апогее орбиты выполняется до тех пор, пока после очередного прохождения атмосферы Земли высота апогея орбиты не достигнет высоты орбиты ОС, т.е. Нα=НОС. После этого в апогее орбиты выполняется импульс Vпер, обеспечивающий подъем перигея орбиты до высоты НОС, т.е. ТКК переходит на орбиту ОС.
Сущность изобретения поясняется фиг. 1÷4, где:
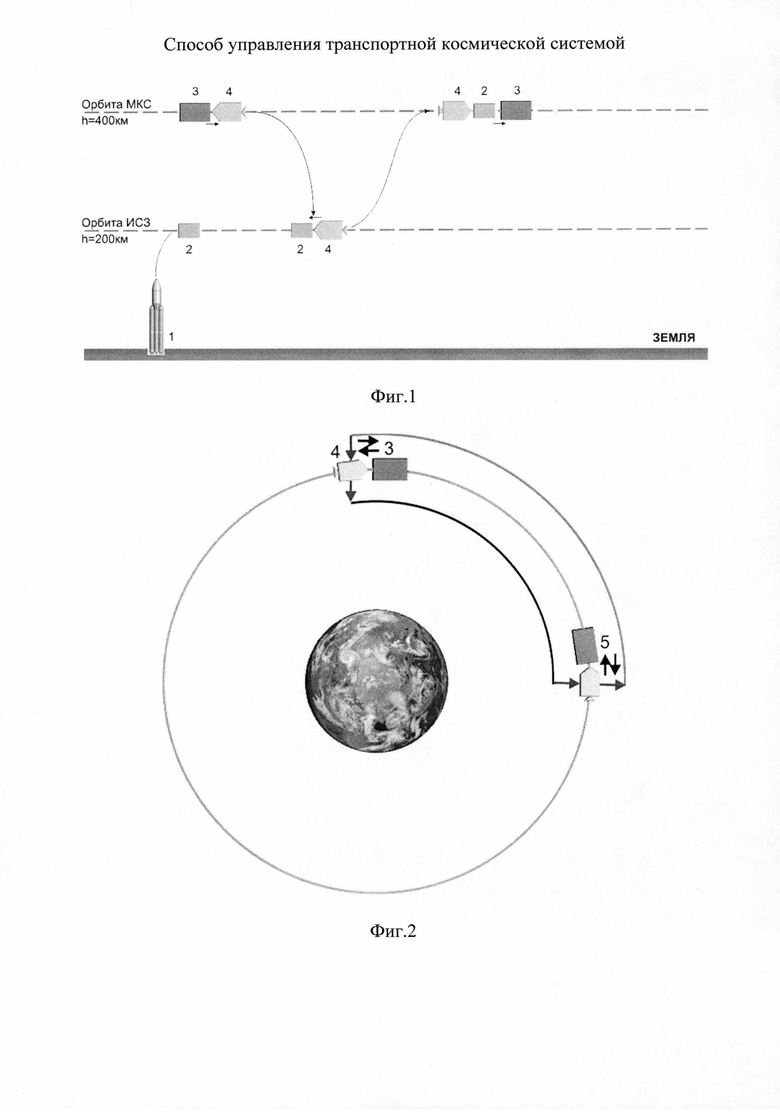
на фиг. 1 показана схема полета аналога - транспортной системы «Паром»,
на фиг. 2 приведена схема полета прототипа - перелета между двумя ОС,
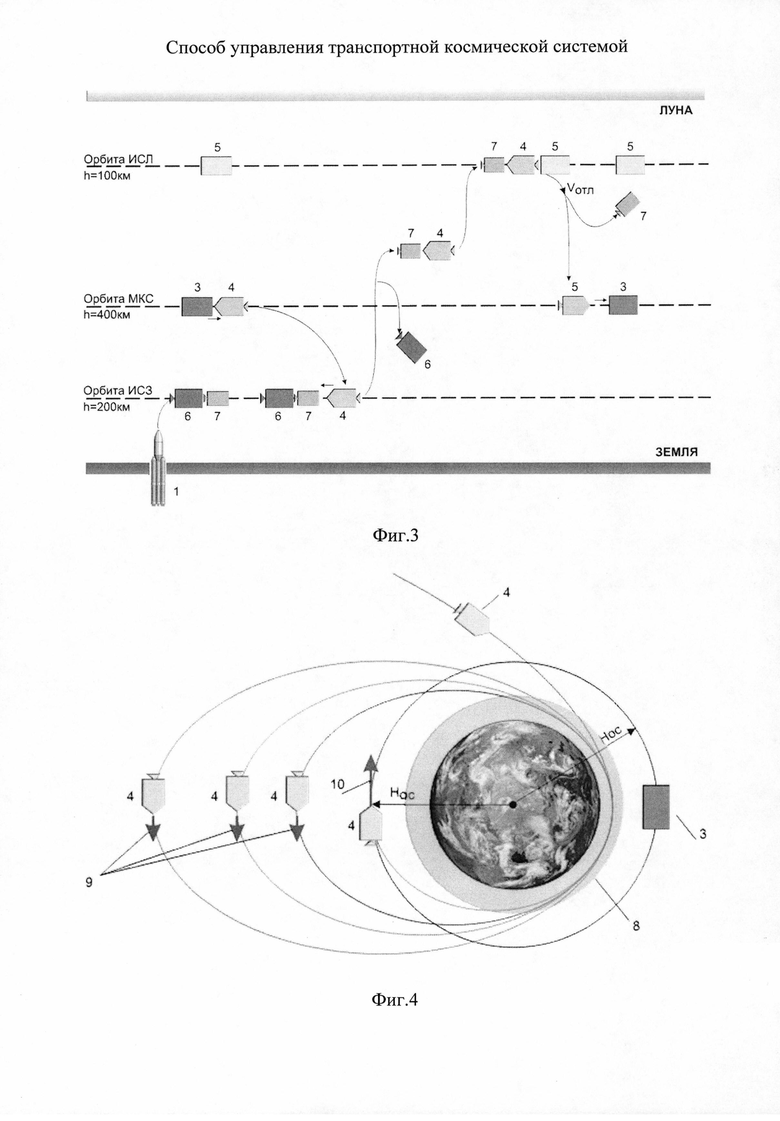
на фиг. 3 поясняется схема полета предлагаемой транспортной системы,
на фиг. 4 представлена схема с последовательными прохождениями на заданном расстоянии от Земли и последующим выходом на орбиту ОС.
На фиг. 1 показана схема доставки грузового контейнера (ГК) на орбитальную станцию (ОС) с использованием межорбитального буксира (МБ). После выведения с помощью РН (1) на опорную орбиту ГК (2) от ОС (3) отстыковывается МБ (4), который переводится на орбиту ГК. Затем после стыковки МБ и ГК образованная связка переводится на орбиту ОС для последующей его стыковки с ОС.
На фиг. 2 представлена схема перелетов между двумя ОС, находящимися на близкой околоземной орбите. От первой ОС (3) расстыковывается КК (4) и переходит на более низкую орбиту для перелета ко второй ОС (5). При обратном перелете КК к первой ОС переходит на более высокую орбиту.
На фиг. 3 представлена схема предлагаемой транспортной космической системы. Вначале с помощью РН (1) на опорную орбиту выводится модуль с разгонными блоками РБ1 (6) и РБ2 (7). Затем от ОС (3) отстыковывается ТКК (4) и переходит на орбиту модуля с РБ. После стыковки ТКК с модулем с РБ образованная связка с помощью РБ1 выполняет отлетный импульс для перевода на траекторию полета к лунной орбитальной станции (ЛОС) (5). По мере выработки топлива РБ1 отделяется от связки и доработку отлетного импульса выполняет РБ2. Затем оставшаяся связка стыкуется с ЛОС. По завершении совместного полета связка отстыковывается от ЛОС и с помощью РБ2 выполняется отлетный импульс Vотл для обратного перелета ТКК к Земле. После выполнения отлетного импульса РБ2 отделяется от ТКК. После торможения в атмосфере Земли ТКК переходит на орбиту околоземной ОС и стыкуется с ней.
На фиг. 4 представлена схема перехода ТКК (4) за счет последовательных прохождений в атмосфере Земли (8) на орбиту околоземной ОС (3). ТКК входит в атмосферу Земли со 2-й космической скоростью. После первого торможения ТКК в атмосфере он переходит на эллиптическую орбиту и в апогее этой орбиты выполняется корректирующий импульс Vкор (9) для регулирования последующей высоты прохождения ТКК в атмосфере Земли. Последовательные прохождения атмосферы с последующим выполнением корректирующих импульсов Vкор проводятся до тех пор, пока очередной апогей орбиты не достигнет высоты орбиты орбитальной станции НОС. После чего в апогее орбиты выполняется импульс Vпер (10) для окончательного перевода ТКК на орбиту околоземной ОС с последующей с ней стыковкой.
Эффективность предлагаемого способа управления транспортной системой показана по сравнению с разрабатываемой в настоящее время перспективной пилотируемой транспортной системой [3. «Перспективный транспортный корабль нового поколения», ж. Новости Космонавтики №9, 2014, с. 58-61] для выполнения полетов на окололунную орбиту или в точки либрации L1 или L2 системы Земля - Луна.
ППТС состоит из разрабатываемого пилотируемого транспортного корабля нового поколения (ПТК НП) массой около 21 т. Для выполнения перелета к ЛОС необходимо дополнительно разработать сверхтяжелую РН с выводимой полезной нагрузкой массой 85÷90 т. Полезную нагрузку РН составляют ПТК НП и модуль с РБ, обеспечивающий отлетный и тормозной импульсы при перелете к ЛОС. После отстыковки от ЛОС ПТК НП выполняет отлетный импульс для перелета к Земле, а перед входом в атмосферу Земли разделяется на двигательный отсек (ДО) и возвращаемый аппарат (ВА). Затем ВА массой 8.5 т выполняет мягкую посадку в заданном районе Земли. Для этого ВА должен иметь средства посадки (система управления спуском, парашютная система, двигатели мягкой посадки, посадочные опоры и т.д.), общей массой около 21% от массы спускаемого аппарата (СА) [4. Антонова Н.П., Брюханов Н.А., Четкин С.В. «Средства посадки пилотируемого транспортного корабля нового поколения», ж. Космическая техника и технология, 4(7) 2014, с. 21-30]. С учетом ТЗП, обеспечивающего безопасность ВА при торможении в атмосфере со 2-й космической скоростью (11.2 км/сек), полная масса средств мягкой посадки, позволяющей многоразовое использование ВА, составит около 35-40% от массы ВА. Оставшаяся масса ВА, обеспечивающая габариты для жизнедеятельности экипажа при перелетах к Луне и обратно, составляет около 5.5 т. При этом многоразовость ПТК НП частичная, т.к. ДО сгорает в атмосфере.
В предлагаемой транспортной системе рассматриваются в основном уже разработанные элементы. Так, для выведения модуля с РБ достаточно использовать РН «Ангара-А5» [5. «Первый полет тяжелой «Ангары»», ж. Новости Космонавтики №2(385) 2015, с. 1-8]. Экипаж доставляется на околоземную ОС на кораблях «Союз-ТМА», выводимых с помощью РН «Союз-ФГ». Из средств безопасности необходимо будет предусмотреть только ТЗП, защищающее ТКК во время прохождений атмосферы Земли при снижении его скорости со 2-й космической до 1-й космической. Так как потребное снижение скорости ТКК~3.2 км/сек, осуществляемое за несколько прохождений (4÷5) в атмосфере Земли, т.е. на ~0.6÷0.8 км/сек за одно прохождение, то это потребует значительно меньшую массу ТЗП по сравнению с массой ТЗП ВА ПТК НП. После проведения перелета к ЛОС и обратно к околоземной ОС, а также дозаправки топливом с помощью грузовых кораблей «Прогресс-М» ТКК способен выполнить очередной перелет. Таким образом, в этой транспортной космической системе ТКК является полностью многоразовым элементом.
Рассмотрим пример. Пусть модуль состоит из двух РБ общей массой 28 т, что соответствует размерности РН «Ангара-5» при старте с к. Восточный [5]. Допустим РБ1 имеет сухую массу mСУХ=3 т, массу топлива mТ=18.5 т и удельный импульс Руд=375 сек, а РБ2 имеет mСУХ=1 т, mТ=5.5 т и Руд=330 сек. Пусть космическая транспортная система выполняет маршрут ОС - ЛОС - ОС. Потребная характеристическая скорость на выполнение этого маршрута: VΣ=V1+V2+Vотл=5000 м/сек, где V1 - отлетный импульс к Луне (3200 м/сек), V2 - тормозный импульс у Луны (900 м/сек) и Vотл - отлетный импульс от Луны (900 м/сек) [6. «Основы теории полета космических аппаратов» под ред. Г.С. Нариманова. М., Машиностроение, 1972]. Представленный модуль с двумя РБ обеспечивает эту потребную скорость для ТКК массой 5 т.
Если же ЛОС расположена в окрестности точки либрации L2, а перелет в эту точку и обратно осуществляется с использованием гравитационного маневра у Луны, то V1=V2=375 м/сек, и потребная характеристическая скорость на выполнение этого маршрута составит: VΣ=V1+V2+Vотл=3950 м/сек. Представленный модуль с двумя РБ обеспечивает эту потребную скорость для ТКК массой 9 т. Такая масса с учетом отсутствия необходимости иметь средства мягкой посадки позволяет создать более комфортные условия для экипажа ТКК, чем у ВА ПТК НП.
Ограничением любой транспортной космической системы является скважность проведения перелетов. В случае перелетов между околоземной ОС и ЛОС для оптимального решения задачи необходимы коллинеарность плоскостей орбит обеих ОС и принадлежность к этим плоскостям линии Луна - Земля. Расчеты показывают, что в случае использования ЛОС с наклонением орбиты i=90° скважность перелетов составляет 15÷25 суток. В случае нахождения ОС в окрестности точки либрации, например L1 или L2, перелет к Земле возможен в любое время, т.к. ТКК по определению постоянно находится на линии Луна - Земля, но оптимальный перелет возможен только в случае если линия Луна - Земля принадлежит и плоскости орбиты околоземной ОС. Т.к. плоскость орбиты околоземной ОС с наклонением i=51.6° и высотой 400 км, например как у МКС, прецессирует в инерциальном пространстве вследствие нецентральности поля тяготения Земли со скоростью около 5° в сутки [6], то возможность для оптимальных перелетов будет появляться через 180/5=36 суток.
В целом, можно сделать вывод, что предлагаемый способ управления с размещением в составе околоземной ОС специального ТКК для перелетов в удаленную точку космического пространства и обратно позволит создать транспортную космическую систему в кратчайшие сроки и существенно меньшими расходами на ее разработку, производство и отработку.
Изобретение относится к перелётам транспортного космического корабля (ТКК) между двумя орбитальными станциями (ОС), одна из которых находится на орбите планеты с атмосферой, а другая - либо на орбите другого небесного тела (напр., Луны), либо вблизи точек либрации (напр., L1 или L2 системы Земля - Луна). Способ включает отстыковку ТКК от околопланетной ОС, его выведение на опорную орбиту модуля разгонных блоков (РБ), сближение и стыковку ТКК с модулем РБ. Затем к образовавшейся связке прикладывают импульсы для перелета к удалённой ОС. Для осуществления обратного перелета к ТКК прикладывают отлетный импульс и затем осуществляют несколько последовательных пролетов в атмосфере планеты для гашения скорости ТКК до круговой на орбите околопланетной ОС. После этого ТКК стыкуется с данной ОС. Техническим результатом изобретения является возможность создания в кратчайшие сроки и с небольшими расходами на ее разработку транспортной системы между околоземной ОС и удалённой ОС. 4 ил.
Способ управления транспортной космической системой, включающий приложение к транспортному космическому кораблю после его отстыковки от орбитальной станции, находящейся на круговой орбите высотой НОС вокруг планеты с атмосферой, заданных импульсов для его перелета в заданную точку космического пространства и последующего обратного перелета к орбитальной станции, отличающийся тем, что перед приложением К1 заданных импульсов производят приложение к транспортному космическому кораблю импульсов сближения для последующей стыковки с модулем разгонных блоков, находящимся на опорной орбите планеты, после чего к образованной в результате стыковки связке прикладывают К2 заданных импульсов, где К2=1, 2…, при этом К1=Κ2+1, К2+2…, с последовательным отделением каждого разгонного блока от упомянутой связки по мере выработки его топлива, а при обратном перелете к упомянутой связке прикладывают отлетный импульс Vотл для прохождения на заданном расстоянии от планеты с последующим выходом транспортного космического корабля за счет аэродинамического торможения на эллиптическую орбиту вокруг планеты, выполняют заданные изменения параметров орбиты транспортного космического корабля в процессе его последовательных прохождений на заданном расстоянии от планеты, для чего после каждого прохождения апогея орбиты прикладывают корректирующий импульс Vкор, вплоть до выполнения условия Нα=НОС, где Нα - высота апогея орбиты транспортного космического корабля, после чего в апогее орбиты прикладывают импульс перехода Vпер на круговую орбиту НОС.
| ТРАНСПОРТНАЯ КОСМИЧЕСКАЯ СИСТЕМА И СПОСОБ ЕЕ УПРАВЛЕНИЯ ПРИ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКЕ ГРУЗОВ | 2001 |
|
RU2216489C2 |
| В.К.СЕРДЮК | |||
| Проектирование средств выведения космических аппаратов | |||
| М., Машиностроение | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Устройство контроля системы движений | 2021 |
|
RU2757825C1 |
| В.С.АВДУЕВСКИЙ, Г.Р | |||
| УСПЕНСКИЙ | |||
| Космическая индустрия | |||
| М | |||
| Машиностроение | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| US 6193193 А, 27.02.2001 | |||
| US 4896848 А, 30.01.1990 | |||
| US 6669148 А, 30.12.2003. | |||

