Предлагаемый способ управления может быть использован в космической технике при организации перелетов транспортного космического корабля (ТКК) между орбитальной станцией (ОС), находящейся на орбите планеты с атмосферой, например МКС и базовой станцией (БС), расположенной на поверхности другого небесного тела, например на Луне.
Известен способ управления транспортной космической системой, выбранный в качестве аналога, включающий приложение к транспортному космическому кораблю после его отстыковки от орбитальной станции, находящейся на круговой орбите высотой HOC вокруг планеты с атмосферой, заданных импульсов для его перелета в заданную точку космического пространства и последующего обратного перелета к орбитальной станции. Такой способ управления был использован в 1986 году во время перелетов КК «Союз-Т15» между ОС «Мир» и ОС «Салют-7» [1. В.Е. Гудилин, Л.И. Слабкий. «Ракетно-космические системы (История. Развитие. Перспективы)», Москва, 1996].
Недостатком этого способа является то, что из-за ограниченных энергетических возможностей КК перелет был возможен только при условии нахождения обеих ОС на близких по высоте орбитах.
Известен способ управления транспортной космической системой, выбранный в качестве прототипа, включающий приложение к транспортному космическому кораблю, находящемуся на орбите планеты с атмосферой, импульса для его перелета на орбиту другого небесного тела, импульса схода с этой орбиты для последующей посадки на поверхность небесного тела, приложение управляемого воздействия при взлете с поверхности небесного тела и приложение отлетного импульса для обратного перелета к планете с атмосферой [2. В.И. Левантовский. «Механика космического полета в элементарном изложении», М, Наука, 1980]. В качестве ТКК рассматривался космический корабль «Аполлон-11», выводимый на опорную орбиту с помощью РН «Сатурн-5» и состоящий из трех отсеков: командный отсек (КО), служебный отсек (СО) и лунный отсек (ЛО). В свою очередь, лунный отсек состоял из посадочной ступени (ПС) и взлетной ступени (ВС). Вместе с КК «Аполлон-11» в полезную нагрузку РН «Сатурн-5» входил разгонный блок (Б) «Сатурн-4Б». После выведения ТКК с помощью РБ выполняет отлетный импульс для перелета к Луне. После перехода на окололунную орбиту ЛО отстыковывается от ТКК и, используя двигательную установку (ДУ) ПС, совершает сход с орбиты и посадку на поверхность Луны. ТКК продолжает оставаться на окололунной орбите. По завершению программы нахождения на Луне ВС, используя собственную ДУ, стартует с Луны, оставляя ПС на поверхности Луны. ВС выводится на окололунную орбиту для сближения и стыковки с ТКК. После стыковки на окололунной орбите экипаж ВС переходит в ТКК, а ВС отделяется. Затем ТКК выполняет отлетный импульс для перелета к Земле с последующим входом в атмосферу и посадкой в заданном районе.
Основными недостатками такого способа управления является то, что для его реализации требуется сверхтяжелая РН грузоподъемностью 136 тонн [2] и все элементы этой транспортной системы используются однократно.
Техническим результатом изобретения является возможность посадки ТКК на поверхность другого небесного тела с последующим его возвращением к Земле для повторного использования.
Технический результат достигается благодаря тому, что в способе управления транспортной космической системой, включающем приложение к транспортному космическому кораблю, находящемуся на орбите планеты с атмосферой, импульса для его перелета на орбиту другого небесного тела, импульса схода с этой орбиты для последующей посадки на поверхность небесного тела, приложение управляемого воздействия при взлете с поверхности небесного тела и приложение отлетного импульса для обратного перелета к планете с атмосферой, в отличие от известного перед приложением импульса для перелета на орбиту другого небесного тела производят отстыковку транспортного космического корабля от орбитальной станции, находящейся на круговой орбите высотой HOC, и прикладывают к нему импульсы для последующей стыковки с модулем разгонных блоков, а азимут стрельбы при приложении управляющего воздействия при взлете с поверхности небесного тела определяют исходя из условий выведения транспортного космического корабля на орбиту, с которой возможно выполнение обратного перелета к планете с атмосферой непосредственно за взлетом путем приложения к транспортному космическому кораблю отлетного импульса, величину которого определяют с учетом прохождения транспортного космического корабля на заданном расстоянии от планеты с выходом на эллиптическую орбиту, после чего выполняют изменения параметров орбиты транспортного космического корабля в процессе его последовательных прохождений на заданном расстоянии от планеты путем приложения корректирующего импульса Vкор при каждом прохождении апогея орбиты вплоть до выполнения условия Hα=HOC, где Hα - высота апогея орбиты транспортного космического корабля, после чего в апогее орбиты к транспортному космическому кораблю прикладывают импульс перехода Vпер на круговую орбиту HOC для его последующей стыковки с орбитальной станцией.
Предлагаемый способ рассмотрим на примере ОС, находящейся на околоземной орбите. Технический результат в предлагаемом способе управления достигается за счет того, что отдельной ракетой-носителем (РН) на околоземную орбиту выводится модуль с разгонными блоками (РБ), способными выполнить импульсы перевода полезной нагрузки в заданную точку космического пространства, например на орбиту Луны. ТКК, находящийся в составе околоземной ОС, расстыковывается с ОС, а затем сближается и стыкуется с модулем с РБ, образовывая связку. Используя энергетические возможности модуля с РБ, к связке прикладывается отлетный импульс для ее перевода на траекторию перелета на орбиту Луны. РБ, по мере выработки в них топлива, отделяются от образованной связки. После достижения орбиты Луны ТКК выполняет импульс схода с орбиты и осуществляет посадку на поверхность Луны.
После взлета ТКК не требуется промежуточной стыковки на окололунной орбите, и поэтому отлетный импульс для обратного перелета может быть выполнен сразу вслед за выведением. Таким образом, взлет ТКК с поверхности Луны осуществляется с азимутом стрельбы, определяемом с учетом текущего взаимного положения Луны и Земли по схеме, использованной при полете автоматической станции «Луна-16» [3. В. Алексеев, Л. Лебедев «За лунным камнем», М, Машиностроение, 1972]. При этом обратный перелет осуществляется по оптимальной плоской траектории, т.е. отлетный импульс является трансверсальным.
При обратном перелете ТКК в отличие от прототипа решается задача возвращения на околоземную ОС. У Земли скорость ТКК соответствует 2-й космической скорости, т.е. около 11.2 км/сек, что на 3.2 км/сек превышает круговую скорость на околоземной орбите. Выполнение у Земли тормозного импульса такой величины потребует дополнительного запаса топлива в ТКК, что существенно снизит эффективность транспортной системы. Отказаться от этого тормозного импульса можно за счет торможения ТКК в атмосфере Земли. Используя последовательные прохождения ТКК в атмосфере, можно постепенно снизить его скорость до орбитальной скорости ОС. Таким образом, приложение отлетного импульса к ТКК осуществляется не только для обратного перелета к Земле, но и для прохождения ТКК на заданном расстоянии от Земли с последующим выходом на вытянутую эллиптическую орбиту за счет аэродинамического торможения. При этом при первом пролете в атмосфере за счет гравитационного маневра регулируется положение плоскости орбиты ТКК для обеспечения оптимальных условий при последующем сближении и стыковке с ОС.
В апогее образованной эллиптической орбиты Hα выполняется корректирующий импульс Vкор, регулирующий высоту перигея орбиты для необходимого снижения орбитальной скорости при очередном прохождении атмосферы Земли. Предполагается, что в зависимости от возможностей теплозащитного покрытия (ТЗП) ТКК высота перигея орбиты ТКК составит 80-90 км. Описанная последовательность прохождений с выполнением корректирующего импульса в апогее орбиты выполняется до тех пор, пока после очередного прохождения атмосферы Земли высота апогея орбиты не достигнет высоты орбиты ОС, т.е. Hα=HOC. После этого в апогее орбиты выполняется импульс Vпер, обеспечивающий подъем перигея орбиты до высоты HOC, т.е. ТКК переходит на орбиту ОС.
Сущность изобретения поясняется фиг. 1÷4, где:
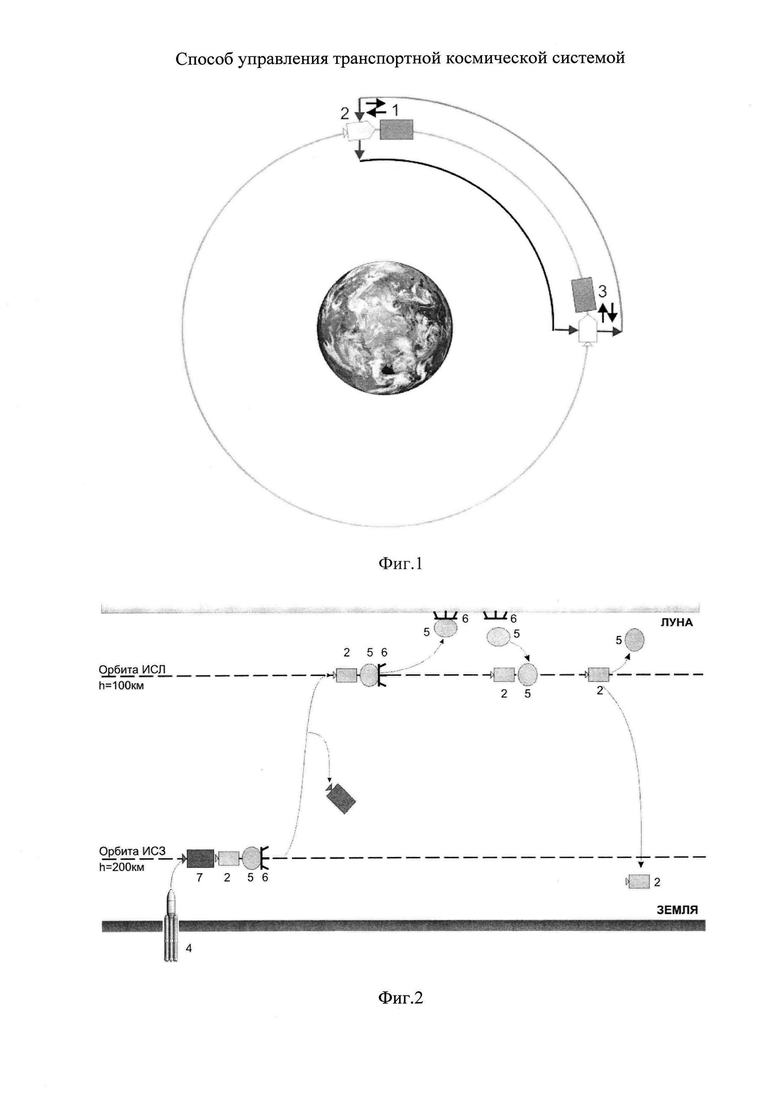
на фиг. 1 показана схема полета аналога - перелета между двумя ОС,
на фиг. 2 приведена схема полета прототипа - ТКК «Апполон-11»,
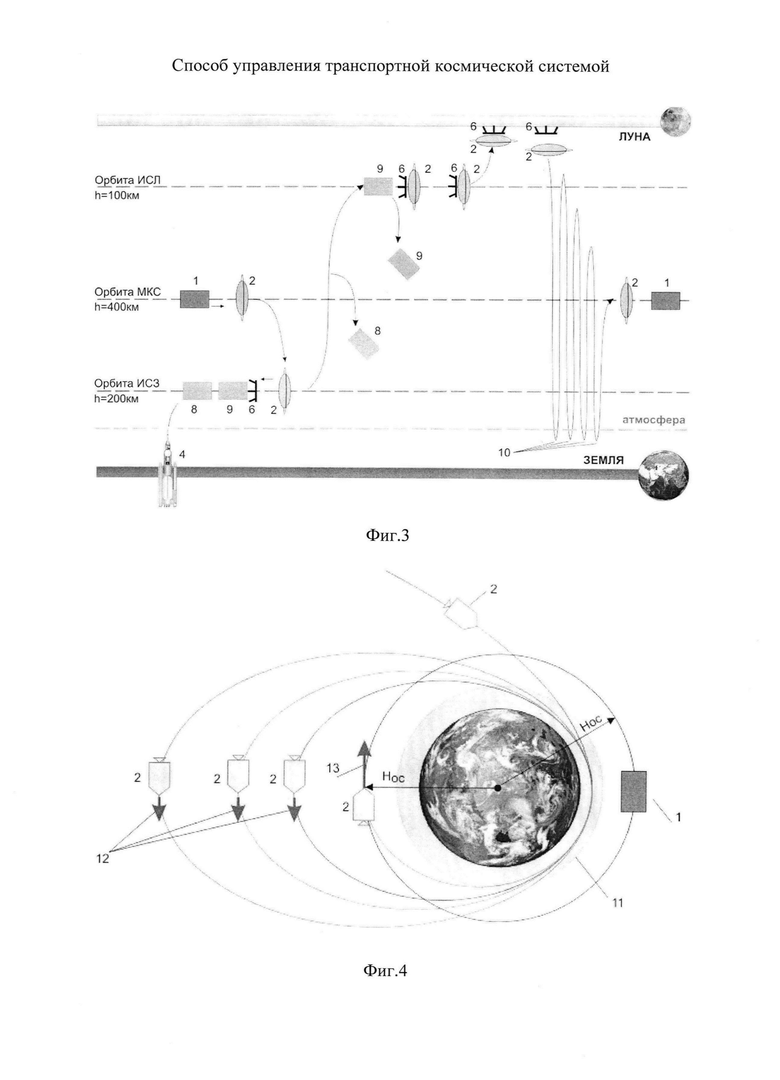
на фиг. 3 поясняется схема полета предлагаемой транспортной системы,
на фиг. 4 представлена схема с последовательными прохождениями в атмосфере Земли и последующим выходом на орбиту ОС.
На этих фиг. отмечены следующие позиции:
1 – ОС, на которой базируется ТКК, 2 - ТКК, 3 - вторая ОС, на которую совершает перелет ТКК, 4 - РН, 5 - взлетная ступень ТКК, 6 - посадочная ступень ТКК, 7 - разгонный блок, 8 - разгонный блок РБ1, 9 - разгонный блок РБ2, 10 - торможения в атмосфере Земли, 11 - атмосфера Земли, 12 - корректирующий импульс Vкор, 13 - импульс перехода на орбиту ОС Vпер.
На фиг. 1 представлена схема перелетов между двумя ОС, находящимися на близкой околоземной орбите.
От первой ОС (1) расстыковывается ТКК (2) и переходит на более низкую орбиту для перелета ко второй ОС (3). При обратном перелете ТКК к первой ОС переходит на более высокую орбиту.
На фиг. 2 показана схема полета ТКК «Апполон-11».
Вначале РН «Сатурн-5» (4) выводит на опорную орбиту связку, состоящую из ТКК (2), лунного отсека (ЛО), включающего ВС (5) и ПС (6), и разгонного блока РБ (7). Затем с помощью РБ обеспечивается перелет связки на окололунную орбиту. По достижении окололунной орбиты от ТКК отделяется ЛО, который с помощью двигательной установки ПС осуществляет посадку на поверхность Луны. По завершении программы нахождения на Луне ВС выполняет взлет с поверхности Луны, оставляя ПС на поверхности Луны, и выполняет промежуточную стыковку с находящемся на окололунной орбите ТКК для доставки на него экипажа ВС. Затем ВС отделяется, а ТКК выполняет отлетный импульс для возвращения на Землю.
На фиг. 3 представлена схема предлагаемой транспортной космической системы.
Вначале с помощью РН (4) на опорную орбиту выводится модуль с разгонными блоками PB1 (8) и РБ2 (9). Затем от ОС (1) отстыковывается ТКК (2) и стыкуется с модулем с РБ. После чего образованная связка с помощью PB1 выполняет отлетный импульс для перевода на траекторию полета к Луне. По мере выработки топлива разгонные блоки отделяются от связки. После перехода на заданную окололунную орбиту ТКК (2) выполняет сход с нее и осуществляет посадку в заданный район поверхности Луны. По завершении программы высадки ТКК взлетает с Луны, оставляя посадочную ступень (6) и переходит на окололунную орбиту, с которой после приложения отлетного импульса осуществляется обратный перелет по оптимальной плоской траектории. После нескольких торможений в атмосфере Земли (10) ТКК переходит на орбиту околоземной ОС и стыкуется с ней.
На фиг. 4 представлена схема перехода ТКК на орбиту околоземной орбитальной станции.
ТКК входит в атмосферу Земли со 2-й космической скоростью. После первого торможения ТКК в атмосфере он переходит на эллиптическую орбиту, и в апогее этой орбиты выполняется корректирующий импульс Vкор (11) для регулирования последующей высоты прохождения ТКК в атмосфере Земли. Последовательные прохождения атмосферы с последующим выполнением корректирующих импульсов Vкор проводится до тех пор, пока очередной апогей орбиты не достигнет высоты орбиты орбитальной станции НОС. После чего в апогее орбиты выполняется импульс Vпер (12) для окончательного перевода ТКК на орбиту околоземной ОС с последующей с ней стыковкой.
Эффективность предлагаемого способа управления транспортной системой показана по сравнению с реализованной транспортной системой при проведении лунных миссий ТКК «Аполлон» в 60-70-х годах прошлого столетия.
Итак, для реализации этого способа использовалась РН «Сатурн-5» грузоподъемностью 136 тонн. При этом масса ТКК на момент его прилета к Луне составляла около 50 тонн, из которых полная масса ЛО составляла ~15 т, а масса ПС и ВС около 10 и 4 т соответственно. Масса ВС в 4 т позволяла иметь сухую массу ВС в 2180 кг с общим полезным объемом 6.7 м3 и свободным объемом для двух космонавтов ~4.5 м3, общий объем КО, на котором весь экипаж, состоящий из 3-х человек, возвращался на Землю, составлял ~6 м3 [2].
В предлагаемой транспортной системе необходимо иметь околоземную орбитальную станцию - МКС. Экипаж доставляется на околоземную ОС и обратно на Землю на кораблях «Союз-ТМА», выводимых с помощью РН «Союз-ФГ». Для реализации предлагаемой транспортной системы также необходима тяжелая РН. Оценим ее грузоподъемность исходя их следующих исходных данных. Пусть космическая транспортная система выполняет маршрут ОС - БС - ОС (см. фиг. 3). Потребная характеристическая скорость на выполнение этого маршрута: VΣ=V1+V2+V3+Vвзл+Vотл+Vсбл+Vпер=8900 м/сек, где V1 - отлетный импульс к Луне (3230 м/сек), V2 - тормозный импульс у Луны (950 м/сек), V3 - импульс схода с орбиты Луны (1900 м/сек), Vвзл - взлетный импульс с Луны (1700 м/сек) и Vотл - отлетный импульс от Луны (900 м/сек) [4. «Основы теории полета космических аппаратов» под ред. Г.С. Нариманова, Машиностроение, Москва, 1972], Vпер - импульс перехода на орбиту околоземной станции после аэродинамического торможения в атмосфере Земли (100 м/сек), Vсбл - суммарный импульс для сближения ТКК с модулем разгонных блоков (120 м/сек). Предполагается, что V1 - отлетный импульс к Луне выполняет кислородно-водородный РБ1 с удельным импульсом Руд=470 сек, V2 - разгонный блок РБ2 с Руд=375 сек, V3 - посадочная ступень с Руд=330 сек, a Vотл, Vпер и Vсбл - ДУ ТКК с Руд=330 сек. Если принять параметры ТКК: Мсух=6.2 т, Мтопл=9.4 т и Мполн=15.6 т, то с учетом конструктивного совершенства Мсух/Мтопл ~ 1/6 массовые характеристики PB1 и РБ2 составят:
РБ1-Мсух=8.5 т Мтопл=55.3 т Мполн=63.8 т, РБ2-Мсух=1.5 т Мтопл=10.0 т Мполн=11.5 т, посадочная ступень - Мсух=2.9 т Мтопл=14.4 т Мполн=17.3 т, а полная масса РН - 92.6 т.
С учетом того же показателя конструктивного совершенства, равного 1/6, сухая масса ТКК без учета ДУ и топливных баков составит 4.6 т, что более чем в 3 раза больше чем у взлетной ступени ЛО ТКК «Аполлон-11», при грузоподъемности РН более чем в полтора раза меньшей, чем у РН «Сатурн-5».
Отметим, что по сравнению с ТКК «Апполон-11» не требуются средства системы посадки, составляющие, как правило, до 21% от массы спускаемого аппарата (СА) [5. Антонова Н.П., Брюханов Н.А., Четкий С.В. «Средства посадки пилотируемого транспортного корабля нового поколения», ж. Космическая техника и технология, 4 (7) 2014, с. 21-30]. После проведения перелета к БС и обратно к околоземной ОС, а также дозаправки топливом, доставляемым, например, с помощью грузовых кораблей «Прогресс-М», ТКК способен выполнить очередной перелет. Таким образом, в этой транспортной космической системе ТКК является полностью многоразовым элементом, что также может рассматриваться как преимущество по сравнению с одноразовым ТКК в программе «Аполлон-11».
Ограничением любой транспортной космической системы является скважность проведения перелетов. В случае перелетов с окололунной станции (ЛОС) на Землю, а именно в качестве ЛОС необходимо рассматривать ТКК «Аполлон-11», находящийся на окололунной орбите во время высадки экипажа ВС на поверхность Луны, для оптимального решения задачи, соответствующего плоскому перелету, необходимо определенное положение между направлением Луна-Земля и плоскостью орбиты окололунной ОС. Расчеты показывают, что в случае использования ЛОС с наклонением орбиты i=90° скважность перелетов составляет 14 суток.
В предлагаемой транспортной космической системе при прямом обратном перелете за счет выбора азимута стрельбы при взлете с поверхности Луны ТКК может выполнить экстренный оптимальный перелет на околоземную орбиту с заданным наклонением, которое обеспечивается гравитационным маневром у Земли, что является также преимуществом этой транспортной космической системы.
Для возвращения на околоземную станцию потребуется ожидание оптимального времени взлета с поверхности Луны. Если бы плоскость орбиты станции в инерциальном пространстве не менялась, то в течение лунного месяца (27.2 суток) можно дважды, используя прилет к Земле либо со стороны Южного, либо Северного полушария, оказаться в заданной плоскости орбиты околоземной ОС [4]. Благодаря прецессии плоскости орбиты околоземной ОС с наклонением i=51.6° и высотой 400 км со скоростью около 5° в сутки [4] максимальное время ожидание оптимальных условий для стыковки с околоземной ОС дополнительно снижается до 10 суток.
В целом можно сделать вывод, что предлагаемый способ управления с размещением в составе околоземной ОС специального многоразового ТКК для посадки на поверхность другого небесного тела позволит создать транспортную космическую систему с существенно меньшими расходами на ее разработку, производство и отработку.
Изобретение относится к управлению работой транспортного космического корабля (ТКК), совершающего рейсы между орбитальной космической станцией (ОКС), находящейся вблизи планеты с атмосферой, и базовой станцией, расположенной, например на Луне. После выведения ракетой-носителем на опорную орбиту модуля с разгонными блоками отстыковывают ТКК от ОКС и стыкуют его с этим модулем. К связке ТКК и модуля прикладывают импульсы для перелета на орбиту базовой станции. Затем ТКК производит посадку на поверхность небесного тела в районе базовой станции и, по завершении программы пребывания там, выполняет взлет с выведением, например, на окололунную орбиту или на траекторию возвращения к планете с атмосферой. При этом ТКК за счет аэродинамического торможения и гравитационного маневра выходит на эллиптическую орбиту с заданным положением её плоскости. В серии пролетов атмосферы скорость КА снижается до круговой на орбите, где ТКК стыкуется с ОКС. Техническим результатом изобретения является обеспечение многоразовости и экономичности транспортной системы, например, между околоземной и лунной станциями. 4 ил.
Способ управления транспортной космической системой, включающий приложение к транспортному космическому кораблю, находящемуся на орбите планеты с атмосферой, импульса для его перелета на орбиту другого небесного тела, импульса схода с этой орбиты для последующей посадки на поверхность небесного тела, приложение управляющего воздействия при взлете с поверхности небесного тела и приложение отлетного импульса для обратного перелета к планете с атмосферой, отличающийся тем, что перед приложением импульса для перелета на орбиту другого небесного тела производят отстыковку транспортного космического корабля от орбитальной станции, находящейся на круговой орбите высотой НОС, и прикладывают к нему импульсы для последующей стыковки с модулем разгонных блоков, а азимут стрельбы при приложении управляющего воздействия при взлете с поверхности небесного тела определяют исходя из условий выведения транспортного космического корабля на орбиту, с которой возможно выполнение обратного перелета к планете с атмосферой непосредственно за взлетом путем приложения к транспортному космическому кораблю отлетного импульса, величину которого определяют с учетом прохождения транспортного космического корабля на заданном расстоянии от планеты с выходом на эллиптическую орбиту, после чего выполняют изменения параметров орбиты транспортного космического корабля в процессе его последовательных прохождений на заданном расстоянии от планеты путем приложения корректирующего импульса Vкор при каждом прохождении апогея орбиты вплоть до выполнения условия Нα=HОС, где Нα - высота апогея орбиты транспортного космического корабля, после чего в апогее орбиты к транспортному космическому кораблю прикладывают импульс перехода Vпер на круговую орбиту НОС для его последующей стыковки с орбитальной станцией.
| ТРАНСПОРТНАЯ КОСМИЧЕСКАЯ СИСТЕМА И СПОСОБ ЕЕ УПРАВЛЕНИЯ ПРИ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКЕ ГРУЗОВ | 2001 |
|
RU2216489C2 |
| В.К.СЕРДЮК | |||
| Проектирование средств выведения космических аппаратов | |||
| М., Машиностроение | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| В.С.АВДУЕВСКИЙ, Г.Р | |||
| УСПЕНСКИЙ | |||
| Космическая индустрия | |||
| М | |||
| Машиностроение | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Устройство контроля системы движений | 2021 |
|
RU2757825C1 |
| US 6193193 А, 27.02.2001 | |||
| US 4896848 А, 30.01.1990 | |||
| US 6669148 А, 30.12.2003. | |||

