Область техники, к которой относится изобретение.
Изобретение относится к области железнодорожного транспорта и может быть использовано преимущественно на подвижном составе, оборудованном автотормозом грузового типа.
Уровень техники.
Известен способ растормаживания автотормозов железнодорожного подвижного состава /1, с.186, абз.6/, в котором для отпуска автотормоза отдельной подвижной единицы опорожняют полость рабочей камеры воздухораспределителя, для чего воздействуют на его выпускной клапан вручную.
Недостатками известного способа являются: возможность его осуществления только вручную и длительность процесса такого растормаживания в парках прибытия сортировочных станций при подготовке состава поезда к расформированию.
Известен также способ предупреждения затормаживания автотормозов железнодорожного подвижного состава /1, с.182, абз.5/, в котором осуществляют разрядку тормозной магистрали медленным темпом, чем предупреждают возможность срабатывания воздухораспределителей подвижных единиц поезда на торможение.
Недостатками такого известного способа являются: длительность процесса предупреждения растормаживания и нестабильность этого процесса, вызываемая возможностью спонтанного срабатывания воздухораспределителей на торможение в результате возникновения дополнительной разрядки тормозной магистрали в случае наличия в числе хотя бы одного воздухораспределителя, срабатывающего на торможение даже при нормируемом медленном темпе.
Наиболее близким является способ растормаживания автотормозов железнодорожного подвижного состава /1, с.185, абз.3-5/, при котором растормаживание автотормозов (после служебного их торможения) осуществляют ступенью повышения давления в тормозной магистрали, чем вызывают на равнинном режиме традиционное сообщение между собой рабочих и золотниковых камер воздухораспределителей.
Недостатками такого способа являются: необходимость установки переключателей воздухораспределителей на равнинный режим отпуска и невозможность растормаживания при разрядке тормозной магистрали до нуля.
Сущность изобретения.
Целью предложенного способа растормаживания автотормозов являются: упрощение технологии процесса растормаживания, сокращение его длительности и исключение необходимости использования ручного труда.
Поставленная цель достигается следующим. Автотормоза железнодорожного подвижного состава имеют в составе своих компонентов кран машиниста, тормозную магистраль и подключенные к ней и управляющими давлением в тормозных цилиндрах воздухораспределители. Последние включают в себя, в числе прочего, полости золотниковых и рабочих камер, уровни давлений сжатого воздуха в которых определяются уровнем давления в тормозной магистрали. Реализуемыми с помощью крана машиниста темпы медленной, служебной, либо экстренной разрядки тормозной магистрали предопределяют возможность, либо бездействия воздухораспределителей, либо их действия на соответствующем режиме торможения, с наполнением тормозных цилиндров сжатым воздухом. Растормаживание автотормозов, заключающееся в опорожнении тормозных цилиндров, возможно дистанционно и вручную. Дистанционно растормаживание осуществляют выполнением ступени повышения давления сжатого воздуха в тормозной магистрали, чем при порожнем режиме включения воздухораспределителей вызывают выброс сжатого воздуха из полостей рабочих камер в полости золотниковых камер. Это вызывает отход главных поршней воздухораспределителей в отпускное положение и опорожнение тормозных цилиндров. Растормаживание автотормозов вручную обеспечивают воздействием на выпускные клапаны воздухораспределителей, в результате чего вызывают выброс сжатого воздуха из полостей рабочих камер в атмосферу и отход главных поршней воздухораспределителей в отпускное положение с опорожнением тормозных цилиндров. Предлагаемый способ растормаживания автотормозов отличается следующим. Используют алгоритм этапности разрядки тормозной магистрали. Для возможности его претворения воздухораспределители каждой подвижной единицы оснащают подсистемой дистанционного растормаживания, которая включает в себя ограничительный, чувствительный и редукторный органы. Алгоритм этапности разрядки тормозной магистрали реализуют следующим образом. На первом этапе осуществляют понижение давления в тормозной магистрали темпом служебной разрядки ниже максимально допустимого уровня при служебных торможениях автотормоза, например, до величины 0,35-0,37 МПа. На втором этапе осуществляют дальнейшее понижение давления в тормозной магистрали темпом медленной разрядки, например, до величины 0,24-0,26 МПа. Причем в течение второго этапа реализуют две фазы. В первой фазе второго этапа, в момент снижения давления в тормозной магистрали, либо в полости золотниковой камеры до уровня, например, 0,27-0,29 МПа, на который настраивают ограничительный орган, его действием подключают чувствительный орган. Во второй фазе второго этапа, в момент дальнейшего снижения давления в тормозной магистрали, либо в полости золотниковой камеры до уровня, например, 0,24-0,26 МПа, на который настраивают редукторный орган, его действием полость рабочей камеры сообщают с атмосферой. На третьем этапе продолжают дальнейшее понижение давления в тормозной магистрали темпом пониженной разрядки до уровня, например, 0,21-0,23 МПа. На четвертом этапе завершают понижение давления в тормозной магистрали до нуля темпом экстренной ее разрядки. При этом в случае, если при реализации первой фазы второго этапа фактический темп разрядки тормозной магистрали превысит нормируемую величину темпа пониженной ее разрядки, то реагированием чувствительного органа, блокируют действие редукторного органа.
Заявляемое техническое решение соответствует критерию изобретения "Новизна" (N). Так, сопоставительный анализ заявляемого решения с прототипом показывает следующие отличия заявляемого решения от известного.
1. Используют алгоритм этапности разрядки тормозной магистрали.
2. Для реализации этапного алгоритма воздухораспределители дополняют подсистемой дистанционного растормаживания.
3. В подсистему дистанционного расторможения включают ограничительный, чувствительный и редукторный органы.
4. Действием ограничительного, чувствительного и редукторного органов при реализации алгоритма этапности обеспечивают нештатную работу воздухораспределителя.
5. Реализацию алгоритма этапности разрядки тормозной магистрали осуществляют в четыре этапа.
6. На первом этапе осуществляют разрядку тормозной магистрали темпом служебного торможения, например, - 0,01-0,04 МПа/с (нормируемый темп служебной разрядки тормозной магистрали /1, с.13, абз.3/).
7. На втором и третьем этапах разрядку тормозной магистрали осуществляют темпом медленной разрядки, например, - 0,02-0,03 МПа/мин (нормируемый темп медленной разрядки тормозной магистрали /1, с.13, абз.3/).
8. На четвертом этапе осуществляют разрядку тормозной магистрали темпом экстренного торможения, например, - более 0,08 МПа/с (нормируемый темп экстренной разрядки тормозной магистрали /1, с.13, абз.3/).
9. Понижение давления тормозной магистрали на первом этапе осуществляют до величины 0,35-0,37 МПа (при зарядном давлении 0,56-0,58 МПа предельно допустимая глубина разрядки тормозной магистрали при служебных торможениях - 0,38 МПа 11, п.10.3.4, абз.3/).
10. Понижение давления тормозной магистрали на втором этапе осуществляют до величины 0,24-0,26 МПа.
11. Понижение давления тормозной магистрали на третьем этапе осуществляют до величины 0,21-0,23 МПа.
12. Настройку ограничительного органа осуществляют, на уровень 0,27-0,29 МПа, при котором действием ограничительного органа обеспечивают подключение чувствительного органа.
13. Настройку чувствительного органа осуществляют на реагирование на темп, превышающий нормируемый темп медленной разрядки.
14. Настройку редукторного органа осуществляют на уровень 0,24-0,26 МПа, при котором в случае не реагирования чувствительного органа действием редукторного органа обеспечивают сообщение полости рабочей камеры воздухораспределителя с атмосферой.
15. Реагированием чувствительного органа на темп, превышающий нормируемый медленный темп понижения давления, блокируют действие редукторного органа, чем исключают возможность сообщения полости рабочей камеры воздухораспределителя с атмосферой.
Заявляемое техническое решение соответствует критерию "Изобретательский уровень" (IS). Так, сравнение заявляемого решения с известными в технике решениями показывает, что использование как различных темпов разрядки тормозной магистрали, так и применение блокирующих, чувствительных и редукторных органов для целей управления режимами действия автотормозов железнодорожного подвижного состава широко известны. Однако их внедрение в предлагаемый способ растормаживания автотормозов проявляет следующие новые свойства.
1. Возможность осуществления процесса дистанционного растормаживания автотормозов ограничивают условием необходимости снижения давления в тормозной магистрали ниже нормируемого максимально допустимого при служебных торможениях автотормоза уровня, чем исключают возможность реализации алгоритма этапности при служебных торможениях автотормоза и тем самым гарантируют штатную работу воздухораспределителей.
2. Контролем реализации темпа медленной разрядки тормозной магистрали после снижения давления в тормозной магистрали, ниже нормируемого при служебных торможениях автотормоза максимально допустимого уровня, исключают возможность реализации алгоритма этапности при экстренном торможении автотормоза и, тем самым гарантируют штатную работу воздухораспределителей.
3. Контроль разрядки тормозной магистрали ниже нормируемого при служебных торможениях автотормоза максимально допустимого уровня обеспечивают действием ограничительного органа, чем предопределяют возможность действия чувствительного органа только в период реализации алгоритма этапности.
4. Нереагированием чувствительного органа только в период реализации алгоритма этапности на темп медленной разрядки предопределяют работу редукторного органа, чем обеспечивают нештатную работу воздухораспределителя.
5. Реагированием чувствительного органа на темп, превышающий темп медленной разрядки, блокируют действие редукторного органа, а значит и реализацию алгоритма этапности, чем гарантированно обеспечивают штатную работу воздухораспределителя.
6. Действием редукторного органа, сообщающего в период реализации алгоритма этапности полость рабочей камеры с атмосферой, обеспечивают нештатную работу воздухораспределителя - его автоматический переход в режим отпуска и, тем самым, автоматическое растормаживание подвижной единицы.
7. Автоматическое растормаживание подвижной единицы действием редукторного органа обеспечивают вне зависимости от положения переключателя режимов отпуска воздухораспределителя.
8. Осуществлением возможности автоматического растормаживания подвижного состава исключают необходимость трудозатрат на ручное его растормаживание.
9. Исключением необходимости трудозатрат на ручное растормаживание обеспечивают сокращение времени, затрачиваемого на подготовку состава поезда к горочному роспуску в парках прибытия сортировочных станций.
Заявляемое техническое решение соответствует критерию "Промышленная применимость" (IA), так как может быть осуществлено использованием алгоритма этапности разрядки оснащенных подсистемами дистанционного растормаживания воздухораспределителей.
Перечень фигур чертежей.
Изобретение поясняется схемами, реализующими предлагаемый способ растормаживания автотормозов.
На фиг.1 представлена структурная схема автотормозов состава поезда, включающая упрощенные схемы автотормоза подвижной единицы и подсистемы дистанционного растормаживания.
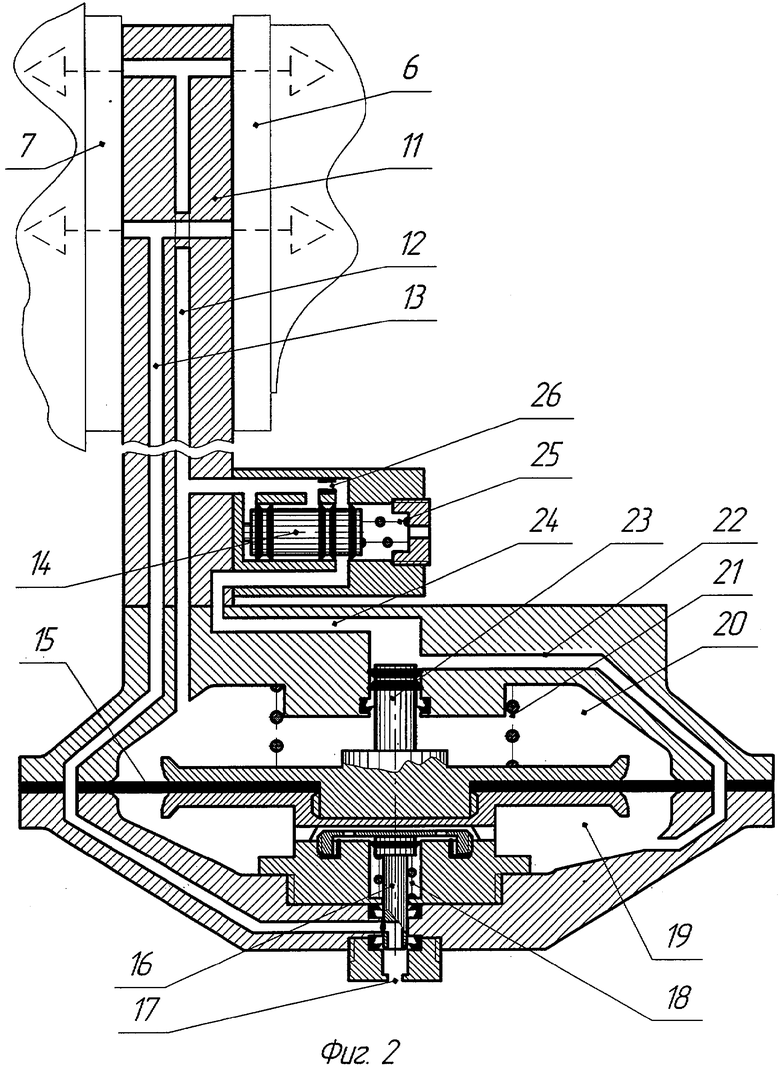
На фиг.2 представлен фрагмент варианта пневмосхемы автотормоза подвижной единицы с подсистемой дистанционного растормаживания, реализующей предлагаемый способ растормаживания автотормоза железнодорожного подвижного состава.
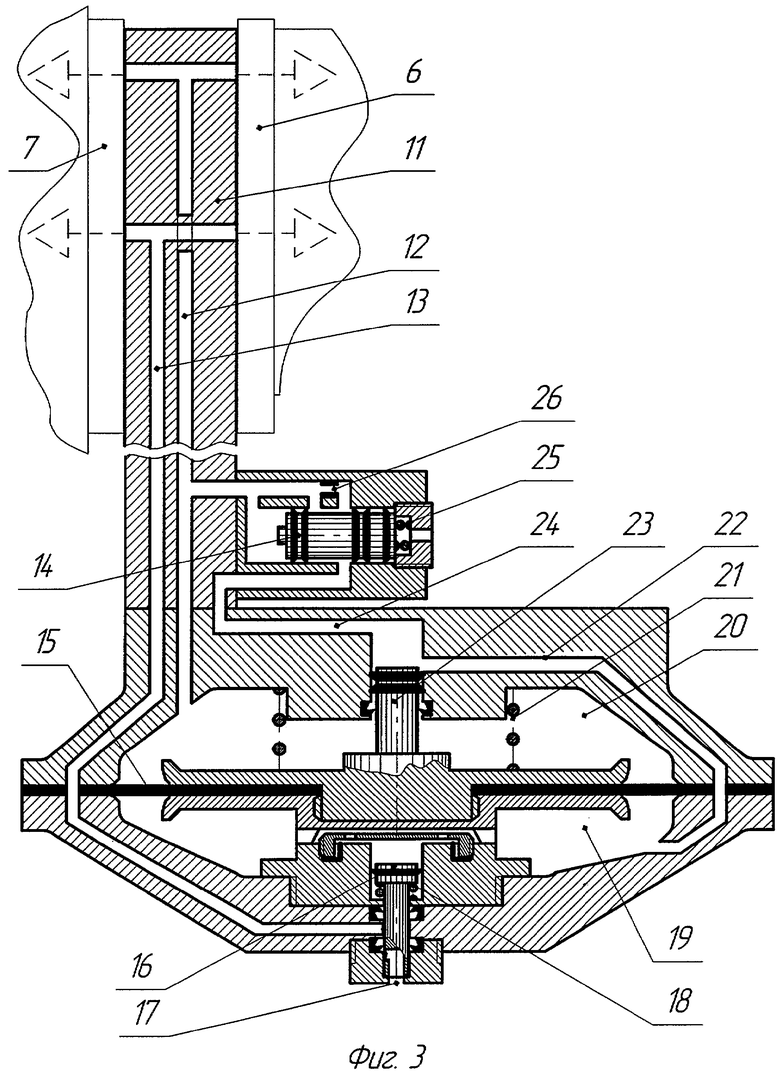
На фиг.3 представлена схема действия подсистемы дистанционного растормаживания при служебных торможениях автотормоза.
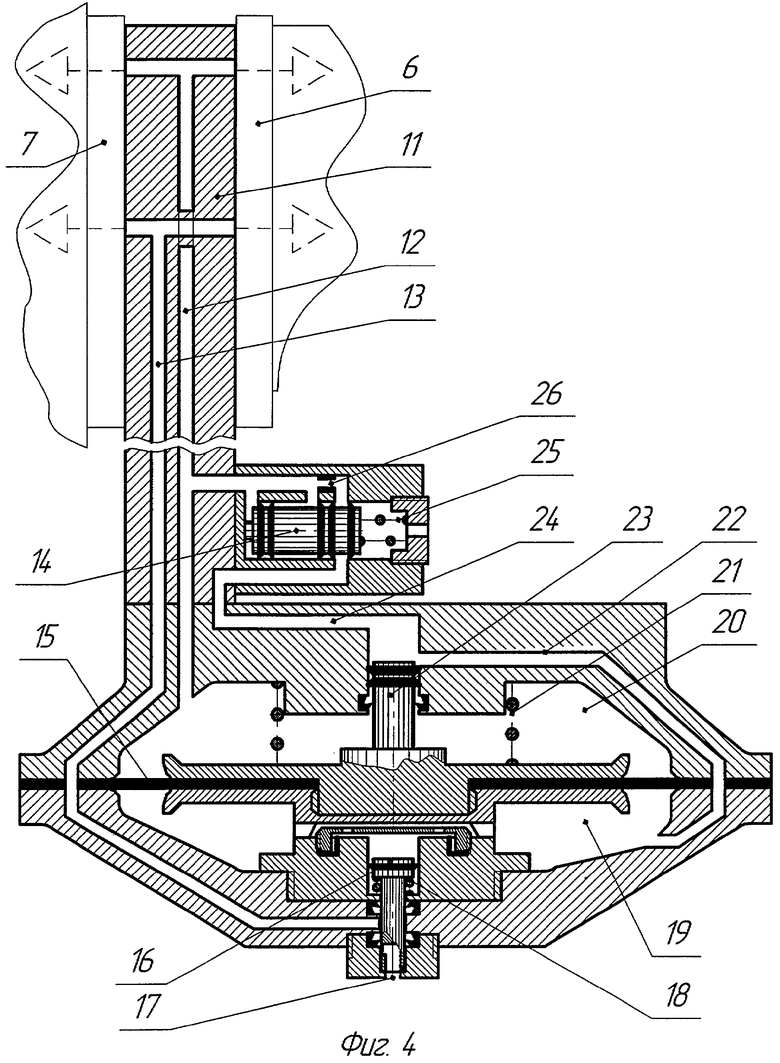
На фиг.4 представлена схема действия подсистемы дистанционного растормаживания при экстренном торможении автотормоза в момент понижения давления в тормозной магистрали, а значит и в полости золотниковой камеры до величины 0,27-0,29 МПа.
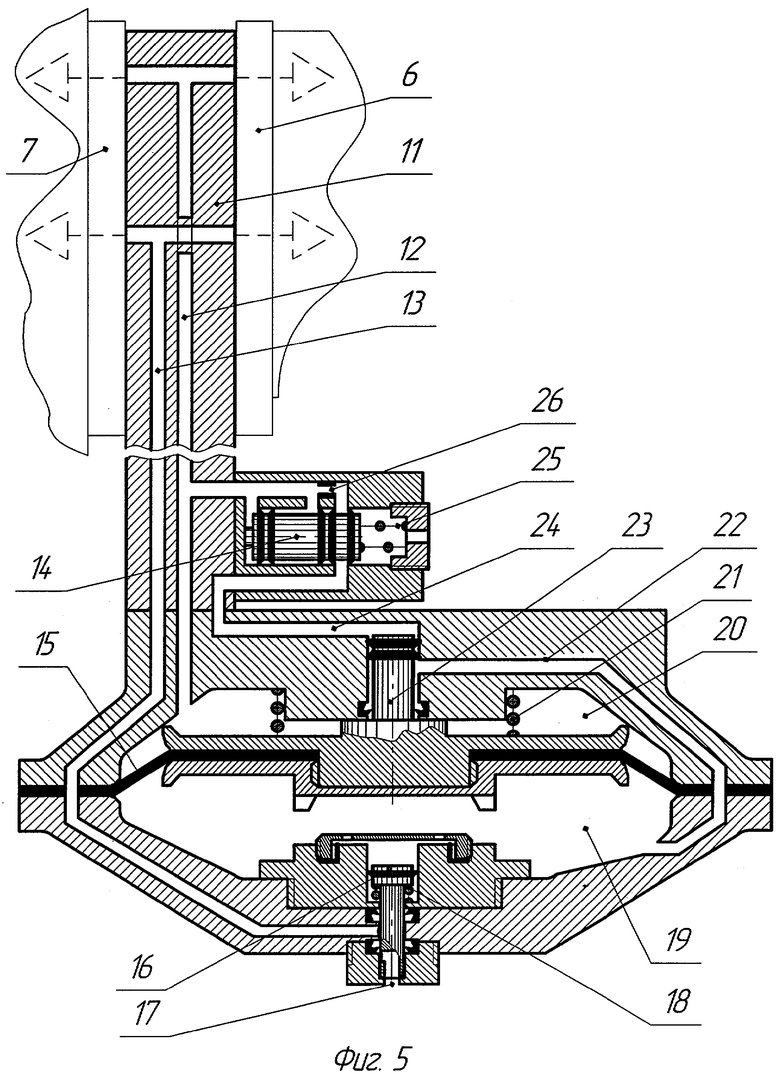
На фиг.5 представлена схема действия подсистемы дистанционного растормаживания при экстренном торможении автотормоза в момент понижения давления в тормозной магистрали, а значит и в полости золотниковой камеры ниже величины 0,24-0,2,6 МПа.
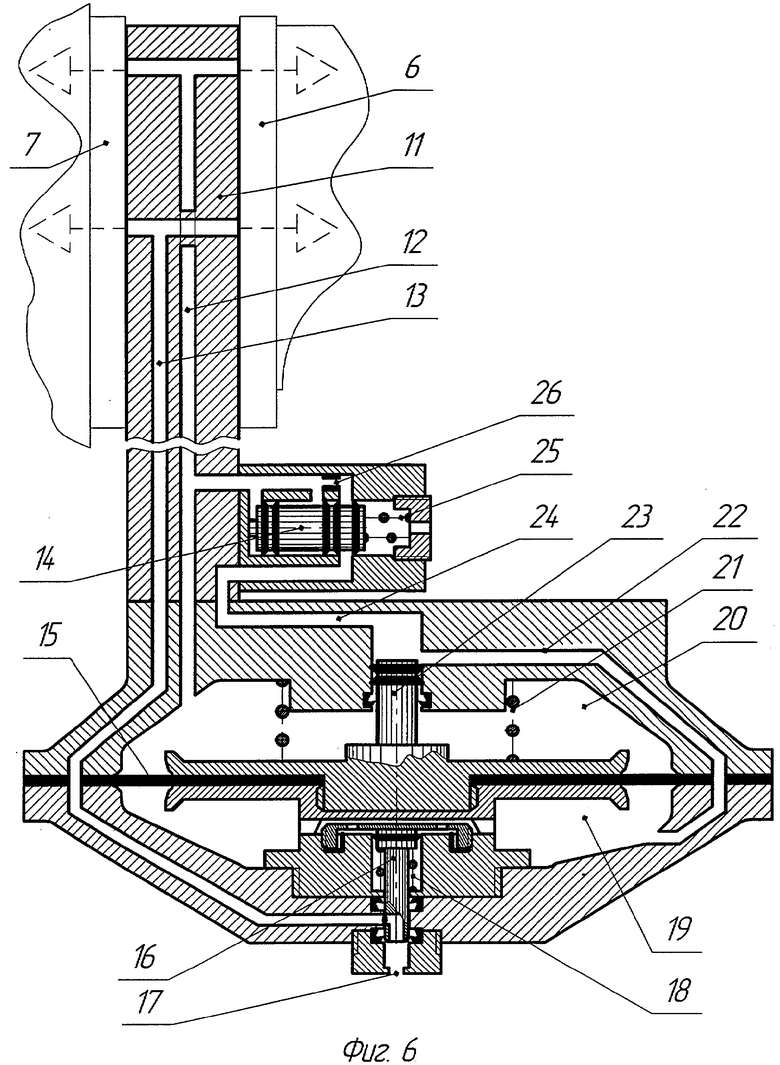
На фиг.6 представлена схема действия подсистемы дистанционного растормаживания при реализации второго этапа алгоритма этапности при темпе медленной разрядки тормозной магистрали в момент понижения давления в ней, а значит и в полости золотниковой камеры до величины 0,24-0,26 МПа.
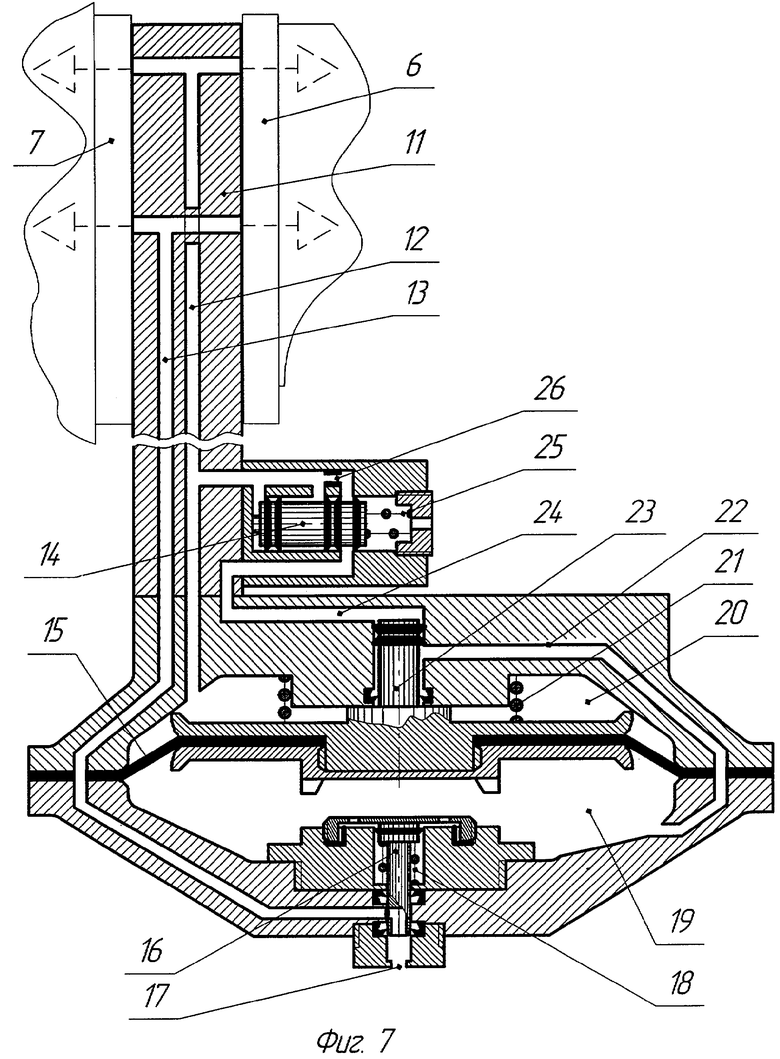
На фиг.7 представлена схема действия подсистемы дистанционного растормаживания при реализации четвертого этапа алгоритма этапности при темпе экстренной разрядки тормозной магистрали в момент понижения давления в тормозной магистрали, а значит и в полости золотниковой камеры ниже величины 0,21-0,23 МПа.
На структурной схеме, представленной на фиг.1 показаны следующие основные компоненты автотормозов грузового поезда. Кран машиниста 1, подключенный к источнику сжатого воздуха 2 и тормозной магистрали 4. С тормозной магистралью 4 сообщается воздухораспределитель 5, включающий в себя магистральную часть 6, двухкамерный резервуар 7 и главную часть 8, причем упомянутые части воздухораспределителя содержат в числе прочего сообщенные между собой индивидуальные полости рабочей и золотниковой камер (на фиг.1 не показаны), уровни давлений сжатого воздуха в которых определяются уровнем давления в тормозной магистрали. При реализации традиционных режимов работы крана машиниста 1 обеспечивают возможность регламентированных, либо бездействия воздухораспределителя 5, либо его действия на соответствующем режиме торможения, с наполнением тормозного цилиндра 9 сжатым воздухом, либо выброс из него сжатого воздуха в атмосферу 10. Подсистема дистанционного растормаживания 11 содержит ограничительный 14, чувствительный 15 и редукторный 16 органы, которые каналами 12 и 13 сообщены соответственно с полостями золотниковой и рабочей камер. Выходом подсистемы дистанционного растормаживания 11 является атмосфера 17
На фрагменте варианта пневмосхемы автотормоза подвижной единицы с подсистемой дистанционного растормаживания, представленной на фиг.2, подсистема дистанционного растормаживания 11 размещена в общем корпусе, помещаемом между двухкамерным резервуаром 7 и магистральной частью 6 воздухораспределителя подвижной единицы. В общем корпусе выполнены транзитные каналы, в числе которых сообщающие между собой полости золотниковых и рабочих камер магистральной части 6 и двухкамерного резервуара 7. Соответствующее подключение ограничительного, чувствительного и редукторного органов осуществляется с помощью отводных каналов 12 и 13 от транзитных каналов общего корпуса.
Ограничительный орган содержит клапан 14, регулировочную пружину 25 и дроссельное отверстие 26.
Чувствительный орган включает в себя управляющую 19 и рабочую 20 полости, разделенные диафрагмой 15. Диафрагма 15 заключена между шайбами, верхняя (по фиг.2) из которых оснащена клапаном 23. Диафрагма 15 отжимается отжимной пружиной 21 в нижнее (по фиг.2) положение. Рабочая полость 20 отводным каналом 12 напрямую сообщена с транзитным каналом, связывающим полости золотниковых камер воздухораспределителя. Управляющая полость 19 может сообщаться с полостью клапана 14 ограничительного органа через полость клапана 23 каналами 22 и 24. В свою очередь канал 24 может сообщаться с каналом 12 через дроссельное отверстие 26 (при показанном на фиг.2 отключенном положении клапана 14), либо минуя дроссельное отверстие 26 (при включенном клапана 14).
Редукторный орган содержит клапан 16, оснащенный атмосферной выемкой. При обеспечиваемом усилием пружины 18 отключенном положении клапана 16 (показанном на фиг.2) транзитный канал, связывающий полости рабочей камеры воздухораспределителя, каналом 13 сообщается с атмосферным отверстием 17.
Регулировкой усилия пружины 25 смещение клапана 14 ограничительного органа в отключенное положение обеспечивается при снижении давления сжатого воздуха в канале 12 (полости золотниковой камеры воздухораспределителя) до уровня 0,27-0,29 МПа.
Усилие пружины 21 регулируется таким образом, чтобы исключить возможность прогиба диафрагмы 15 при перепаде давлений менее 0,01 МПа между управляющей 19 и рабочей 20 полостями чувствительного органа. При большей величине перепада давлений между управляющей 19 и рабочей 20 полостями прогиб диафрагмы 15 вызывает смещение клапана 23 во включенное положение, при котором канал 22 изолируется от канала 24.
Регулировкой усилия пружины 18 смещение клапана 16 редукторного органа в отключенное положение обеспечивается при снижении давления сжатого воздуха в управляющей полости 19 чувствительного органа до уровня 0,24-0,26 МПа.
Сведения, подтверждающие возможность осуществления изобретения.
Лучшим вариантом реализации предлагаемого способа растормаживания автотормоза является вариант, представленный на фиг.2, обладающий повышенной надежностью действия и сниженной материалоемкостью. Это достигается за счет исключения: во-первых, необходимости использования специальных воздуховодов к полостям золотниковой и рабочей камер воздухораспределителя и между органами подсистемы дистанционного растормаживания; во-вторых, необходимости применения специальных кронштейнов для закрепления органов подсистемы дистанционного растормаживания на раме подвижной единицы.
1. Действие подсистемы дистанционного растормаживания при зарядке-отпуске автотормозов.
При зарядке-отпуске автотормозов состава поезда (см. фиг.1) ручка крана машиниста 1 устанавливается в положения I или II, и в тормозной магистрали 4 начинается процесс повышения давления (вплоть до нормируемого регулировкой редуктора крана машиниста 1) за счет ее питания краном машиниста 1 от источника сжатого воздуха 2. На подвижной единице упомянутое повышение давления в тормозной магистрали 4 вызывает традиционный переход воздухораспределителя 5 в режим зарядки-отпуска. Это вызывает:
- сообщение тормозного цилиндра 9 с атмосферой 10;
- процесс зарядки индивидуальных полостей золотниковой и рабочей камер, который заканчивается после выравнивания давлений в золотниковой и рабочей камерах с установившимся давлением в тормозной магистрали 4.
Одновременно сжатый воздух (см. фиг.2) из транзитного канала между полостями золотниковых камер магистральной части 6 и двухкамерного резервуара 7 по отводному каналу 12 поступает:
- в рабочую полость 20 чувствительного органа;
- на вход ограничительного органа, от которого через дроссельное отверстие 26, правое (по фиг.2) межманжетное пространство клапана 14, внутренние каналы 24 и 22 поступает в управляющую полость 19 чувствительного органа. Одновременно сжатый воздух из канала 12 поступает во включающую полость клапана 14.
Под действием нарастающего давления сжатого воздуха во включающей полости клапана 14, последний, преодолевая усилие пружины 25, смещается в крайнее правое (по фиг.2) положение. При этом открывается второй путь сообщения отводного канала 12 с каналом 24 через левое межманжетное пространство клапана 14.
Нарастающее давление сжатого воздуха в полости 19 одновременно действует и во включающей полости клапана 16 редукторного органа. Клапан 16, преодолевая усилие пружины 18, смещается из нерабочего положения в рабочее, что вызывает разобщение отводного канала 13, а следовательно, и транзитного канала между рабочими камерами магистральной части 6 и двухкамерного резервуара 7 от атмосферного отверстия 17.
Процесс зарядки завершается выравниванием давлений в полостях золотниковой и рабочей камер воздухораспределителя с нормированным зарядным давлением в тормозной магистрали 4. Занимаемое при этом положение органов подсистемы дистанционного растормаживания показано на фиг.3.
Таким образом, дополнение воздухораспределителя подсистемой нештатного торможения не нарушает штатную работу воздухораспределителя в режиме зарядки-отпуска.
2. Действие подсистемы дистанционного растормаживания при служебных торможениях автотормоза.
Служебные торможения автотормоза, как известно, осуществляются переводом ручки крана машиниста в положение служебного торможения (V положение ручки) и после достижения необходимой величины понижения давления сжатого воздуха в тормозной магистрали дальнейшая ее разрядка прекращается постановкой ручки крана в положение перекрыш (IV или III положения ручки). При этом понижение величины давления в тормозной магистрали осуществляется темпом служебной разрядки - 0,01-0,04 МПа/с.
Выполнение ступенчатых или полных служебных торможений предусматривает максимальную глубину разрядки тормозной магистрали (по манометру локомотива) до уровня не ниже 0,38 МПа /2, п.10.3.4/. Возможный в этом случае перепад давлений между головным и хвостовым вагонами грузового поезда не может превышать 0,06-0,08 МПа. Такой перепад давлений нормируется в /2, п.9.2.6, второй абзац/ и допускает в тормозной магистрали в хвосте длинносоставного поезда при длине состава более 300 осей давление не менее 0,50 МПа при зарядном давлении на локомотиве 0,56-0,58 МПа.
Поэтому при служебных торможениях понижение давления в тормозной магистрали 4, а следом и в полостях золотниковой камеры воздухораспределителя (а значит и в канале 12) также снижается:
- на головных вагонах не ниже 0,38 МПа;
- на хвостовых вагонах длинносоставного поезда не ниже 0,30-0,32 МПа.
В результате в воздухораспределителях как головных, так и хвостовых вагонов уровень остаточного давления в золотниковых камерах превышает уставку (регулировку пружины 25) ограничительных органов (0,27-0,29 МПа). Поэтому клапаны 14 остаются в этой ситуации в крайнем правом положении и сохраняют прямое сообщение каналов 12 с полостями 19 чувствительных органов. В итоге понижение давления в управляющей 19 и рабочей 20 полостях происходит синхронно, без возникновения перепада давлений между ними (см. фиг.3). Поэтому подсистема дистанционного растормаживания никакого влияния на работу автотормоза вагона (как головного, так и хвостового в длинносоставном и нормальной длины поездах) не оказывает.
Последующий отпуск (в том числе и полный) никаких изменений в действии подсистемы дистанционного растормаживания не вызывает.
Таким образом, дополнение воздухораспределителя подсистемой нештатного торможения не нарушает штатную работу воздухораспределителя в режимам служебных торможений автотормоза.
3. Действие подсистемы дистанционного растормаживания при экстренном торможении автотормоза.
Экстренное торможение автотормоза, как известно, осуществляют переводом ручки крана машиниста в положение экстренного торможения (VI положение ручки) и понижением давления сжатого воздуха в тормозной магистрали до нуля. При этом понижение величины давления в тормозной магистрали осуществляется темпом экстренной разрядки - более 0,08 МПа/с.
Поэтому при экстренном торможении автотормоза:
- в начальный период, в момент понижения давления в тормозной магистрали, а значит и в полости золотниковой камеры до величины 0,27-0,29 МПа, происходит смещение клапана 14 под действием усилия пружины 25 (см. фиг.4);
- смещение клапана 14 вводит в цепь разрядки сжатого воздуха из управляющей полости 19 в полость золотниковой камеры дроссельное отверстие 26;
- дальнейшее понижение давления в тормозной магистрали, а значит и в полости золотниковой камеры, продолжающимся темпом экстренной разрядки в интервале от 0,27-0,29 до 0,24-0,26 МПа вызывает возникновение перепада давлений между управляющей 19 и рабочей 20 полостями из-за замедленного понижения давления в управляющей полости 19, обеспечиваемого наличием дроссельного отверстия 26;
- возникший перепад давлений инициирует прогиб диафрагмы 15 и смещение клапана 23;
- смещение клапана 23 прерывает сообщение между каналами 22 и 24;
- прерывание сообщения между каналами 22 и 24 прекращает возможность дальнейшей разрядки управляющей полости 19;
- сохранение в управляющей полости 19 уровня давления сжатого воздуха, превышающего усилие пружины 18, обеспечивает продолжение нахождение клапана 16 редукторного органа во включенном положении;
- нахождение клапана 16 во включенном положении исключает возможность сообщения канала 13, а значит и полости рабочей камеры воздухораспределителя с атмосферным отверстием 17 (см. фиг.5);
- дальнейшая разрядка тормозной магистрали и, соответственно, полости золотниковой камеры, до нуля никаких дальнейших изменений в работу органов подсистемы дистанционного растормаживания не вносит.
В итоге, дополнение воздухораспределителя подсистемой нештатного торможения не нарушает штатную работу воздухораспределителя в режиме экстренного торможения автотормоза.
4. Действие подсистемы дистанционного растормаживания при осуществлении алгоритма этапности.
Перед отцепкой поездного локомотива в парке прибытия сортировочной станции (либо после отцепки последнего и осуществления процесса зарядки-отпуска тормозной магистрали состава поезда от централизованного поста) при нахождении ручки крана машиниста 1 в поездном положении (II положение ручки) ослабляют усилие пружины редуктора крана машиниста 1, для чего выворачивают его стакан (на представленных фигурах редуктор крана машиниста 1 не показан).
Первый этап алгоритма этапности реализовывают переводом ручки крана машиниста 1 в положение служебного торможения (V положение ручки). Этим понижают давление в уравнительном резервуаре крана машиниста 1 и, следовательно, в тормозной магистрали 4 темпом служебной разрядки до уровня 0,38 МПа. Реагируя на служебный темп разрядки тормозной магистрали воздухораспределители вагонов состава поезда, традиционно переходят в режим служебного торможения, что вызывает затормаживание автотормозов - наполнение тормозных цилиндров сжатым воздухом.
Реализацию второго и третьего этапов алгоритма этапности осуществляют переводом ручки крана машиниста 1 в поездной режим (II положение ручки). Этим работой стабилизатора крана машиниста (при ослабленной выворачиванием стакана пружине его редуктора) обеспечивают медленный темп разрядки уравнительного резервуара, чем, в свою очередь, вызывают темп медленной разрядки тормозной магистрали 4 (на представленных фигурах стабилизатор крана машиниста 1 не показан). При этом имеет место следующее:
- реализация первой фазы второго этапа алгоритма этапности, вызывающая смещение клапана 14 под действием усилия пружины 25, завершается в момент понижения давления темпом медленной разрядки тормозной магистрали, а значит и полости золотниковой камеры, до величины 0,27-0,29 МПа;
- происходит смещение клапана 14 под действием усилия пружины 25;
- смещение клапана 14 вводит в цепь разрядки сжатого воздуха из управляющей полости 19 в полость золотниковой камеры дроссельное отверстие 26;
- реализацию второй фазы второго этапа алгоритма этапности завершают в период дальнейшего понижения давления темпом медленной разрядки тормозной магистрали, а значит и полости золотниковой камеры, от величины 0,27-0,29 МПа до величины 0,24-0,26 МПа;
- реализация второй фазы второго этапа алгоритма этапности характеризуется отсутствием перепада давлений между управляющей 19 и рабочей 20 полостями;
- отсутствие перепада давлений между управляющей 19 и рабочей 20 полостями обеспечивается медленным темпом понижения давления в полости золотниковой камеры, благодаря чему понижение давления в управляющей полости 19, несмотря на наличие дроссельного отверстия 26, не отстает от понижения давления в рабочей полости 20;
- реализация третьего этапа алгоритма этапности начинается после переброса клапана 16 редукторного органа под действием усилия пружины 18 в отключенное положение в момент снижения давления в тормозной магистрали, а значит и в полости золотниковой камеры, до величины 0,24-0,26 МПа (см. фиг.6);
- перебросом клапана 16 вызывают сообщение канала 13 с атмосферным отверстием 17, чем обеспечивают снижение давления в полости рабочей камеры воздухораспределителя до нуля и традиционному переходу воздухораспределителя в режим полного отпуска;
- переходом воздухораспределителя в режим полного отпуска вызывают растормаживание автотормоза - выброс сжатого воздуха из тормозного цилиндра в атмосферу.
Реализацию четвертого этапа алгоритма этапности осуществляют переводом ручки крана машиниста 1 в положение экстренного торможения (VI положение ручки), чем вызывают дальнейшее понижение давления темпом экстренного торможения в тормозной магистрали 4, а значит и в полости золотниковой камеры, до нуля. Это, хотя и вызывает прогиб диафрагмы 15 под действием возникшего перепада давлений между управляющей 19 и рабочей 20 полостями (см. фиг.7), но к переходу воздухораспределителя в режим торможения не приводит, поскольку в полости его рабочей камеры давление равно нулю. В итоге затормаживание автотормоза - наполнение тормозного цилиндра сжатым воздухом не происходит.
Таким образом, реализацией предлагаемого алгоритма этапности, которую осуществляют с помощью дополняющей воздухораспределитель подсистемы дистанционного растормаживания, обеспечивают нештатную работу воздухораспределителя - автоматическое растормаживание автотормозов.
Достоинства предлагаемого способа растормаживания автотормозов.
Использованием предлагаемого способа растормаживания автотормозов преследуют получение следующих достоинств.
Возможность гарантированной работы автотормозов грузового подвижного состава существующим порядком, которую обеспечивают предупреждением возможности реализации алгоритма этапности действием подсистемы дистанционного растормаживания при служебных и экстренных торможениях.
Возможность автоматического растормаживания автотормозов грузового подвижного состава, которое обеспечивают реализацией алгоритма этапности действием подсистемы дистанционного растормаживания.
Возможность автоматического растормаживания автотормозов грузового подвижного состава вне зависимости от положения переключателя режимов отпуска воздухораспределителя, которое обеспечивают реализацией алгоритма этапности действием подсистемы дистанционного растормаживания, сообщающей полость рабочей камеры воздухораспределителя с атмосферой. По сути это аналогично результату, имеющему место при воздействии на выпускной клапан воздухораспределителя вручную.
Существенное сокращение времени, затрачиваемого на растормаживание автотормозов грузового поезда, которое обусловливается суммированием времен, затрачиваемых на:
- выворачивание стакана редуктора крана машиниста при нахождении его ручки в II положении, которое может составить - 20 с;
- перевод ручки крана машиниста в V положение, которое может составить - 1 с: или от момента начала растормаживания - 21 с;
- реализацию первого этапа алгоритма этапности, заключающуюся в разрядке уравнительного резервуара с 0,56-0,58 (в среднем с 0,57) МПа до 0,35-0,37 (в среднем до 0,36) МПа темпом служебного торможения (0,01-0,04 МПа/с, в среднем - 0,025 МПа/с), которое может составить - (0,57-0,36)/0,025=8,4≈9 с: или от момента начала растормаживания - 30 с;
- перевод ручки крана машиниста во II положение, которое может составить - 1 с: или от: момента начала растормаживания - 31 с;.
- реализацию второго и третьего этапов алгоритма этапности, заключающуюся в разрядке уравнительного резервуара с 0,36 МПа до 0,21-0,23 (в среднем до 0,22) МПа медленным темпом 0,02-0,03 МПа/мин (в среднем - 0,025 МПа/мин) или 0,004 МПа/с, которое может составить - (0,36-0,22)/0,004=336 с: или от момента начала растормаживания - 367 с;
- реализацию четвертого этапа алгоритма этапности, заключающуюся в разрядке уравнительного резервуара с 0,22 МПа до 0 темпом экстренного торможения (0,08 МПа/с), которое может - составить 0,22/0,08=2,75≈3 с: или от момента начала растормаживания - 370 с≈6,2 мин.
Нормируемая длительность ручного растормаживания грузового состава осмотрщиками вагонов в парках прибытия сортировочных станций минимально составляет 15 мин.
В итоге длительность процесса растормаживания при осуществлении предлагаемого способа растормаживания автотормозов сокращается в - 15/6,2≈2,4 раза.
Технические результаты, получаемые при использовании предлагаемого способа растормаживания автотормозов.
1. Обеспечивается гарантированное штатное действие воздухораспределителей существующим порядком.
2. Обеспечивается управляемое нештатное действие воздухораспределителей измененным порядком, приводящим к возможности дистанционного растормаживания автотормозов грузового поезда в парках прибытия сортировочных станций.
3. Возможность дистанционного растормаживания автотормозов грузового поезда в парках прибытия сортировочных станций не требует переключения переключателей режимов отпуска воздухораспределителей.
4. Существенно сокращается время, затрачиваемое на растормаживание автотормозов грузового поезда в парках прибытия сортировочных станций.
5. Исключается необходимость трудозатрат осмотрщиков вагонов на растормаживание грузовых поездов в парках прибытия сортировочных станций.
Возможность осуществления изобретения.
Возможность осуществления предложенного способа растормаживания автотормозов - реализации алгоритма этапности, которую обеспечивают использованием подсистемы дистанционного растормаживания, может быть достигнута использованием, например, в качестве:
- ограничительного органа 14 - специального клапана, выход которого может в зависимости от его выключенного или включенного состояния сообщаться с двумя входами, причем проходное сечение первого входа должно быть ограничено дроссельным отверстием. Отжатие клапана должно обеспечиваться усилием пружины при снижении воздействующего давление сжатого воздуха до уровня 0,27-0,29 МПа;
- чувствительного органа 15 - диафрагмы, заключенной между специальными шайбами и зажатой соответствующими фланцами, являющимися элементами конструкции от магистральной части воздухораспределителя №483. Прогиб диафрагмы должен быть обеспечен при возникновении перепада давлений 0,01 МПа между образованными диафрагмой и фланцами полостями;
- редукторного органа 16 - специального клапана, либо конструкции, аналогичной конструкции редуктора крана машиниста №394. Усилие пружины специального клапана, либо стакана редуктора должно быть отрегулировано на отжатие специального клапана, либо диафрагмы редуктора при снижении воздействующего давления сжатого воздуха до уровня 0,24-0,26 МПа;
- общего корпуса для размещения перечисленных органов - корпуса, аналогичного корпусу от конструкции пневмоэлектрического датчика №418, либо плиты-кронштейна, закрепленной между двухкамерным резервуаром и магистральной частью воздухораспределителя с расположенными на ней навесными органами подсистемы дистанционного растормаживания.
Список использованных источников.
1. Иноземцев В.Г., Казаринов В.М., Ясенцев В.Ф. Автоматические тормоза. Учебник для вузов ж.-д. транспорта. - М.: Транспорт, 1981.
2. Инструкция по эксплуатации тормозов подвижного состава железных дорог. ЦТ-ЦВ-ЦЛ-ВНИИЖТ/277. М.: Транспорт-Трансинфо, 1998. (С дополнениями и изменениями, утвержденными указаниями МПС России от 11.06.1997 г. №В-705у, от 19.02.1998 г. №В-181у и от 30.01.2002 г. №Е-72у).
Изобретение относится к области железнодорожного транспорта и может быть использовано на подвижном составе, оборудованном автотормозом грузового типа. Способ растормаживания автотормозов заключается в использовании алгоритма этапности, реализуемого с помощью дополняющей воздухораспределитель подсистемы дистанционного растормаживания, которая содержит ограничительный, чувствительный и редукторный органы. При служебных или экстренных торможениях подсистемой дистанционного растормаживания обеспечивается штатная работа воздухораспределителя, инициирующая соответствующее действие автотормоза подвижной единицы. В случае осуществления алгоритма этапности подсистемой дистанционного растормаживания обеспечивается нештатная работа воздухораспределителя, инициирующая автоматическое растормаживание автотормоза подвижной единицы вне зависимости от положения переключателя режимов отпуска воздухораспределителя. Реализация алгоритма этапности заключается в последовательном исполнении: разрядки тормозной магистрали темпом служебного торможения ниже уровня максимально нормируемой ее разрядки, фиксируемого ограничительным органом; последующей разрядки тормозной магистрали медленным темпом, фиксируемым чувствительным органом, до уровня, фиксируемого редукторным органом, который осуществляет сообщение рабочей камеры воздухораспределителя с атмосферой, чем автоматически обеспечивается гарантированное растормаживание автотормоза, и завершающей полной разрядки тормозной магистрали темпом экстренного торможения. Техническим результатом является упрощение технологии процесса растормаживания, сокращение его длительности и исключение необходимости использования ручного труда. 1 з.п. ф-лы, 7 ил.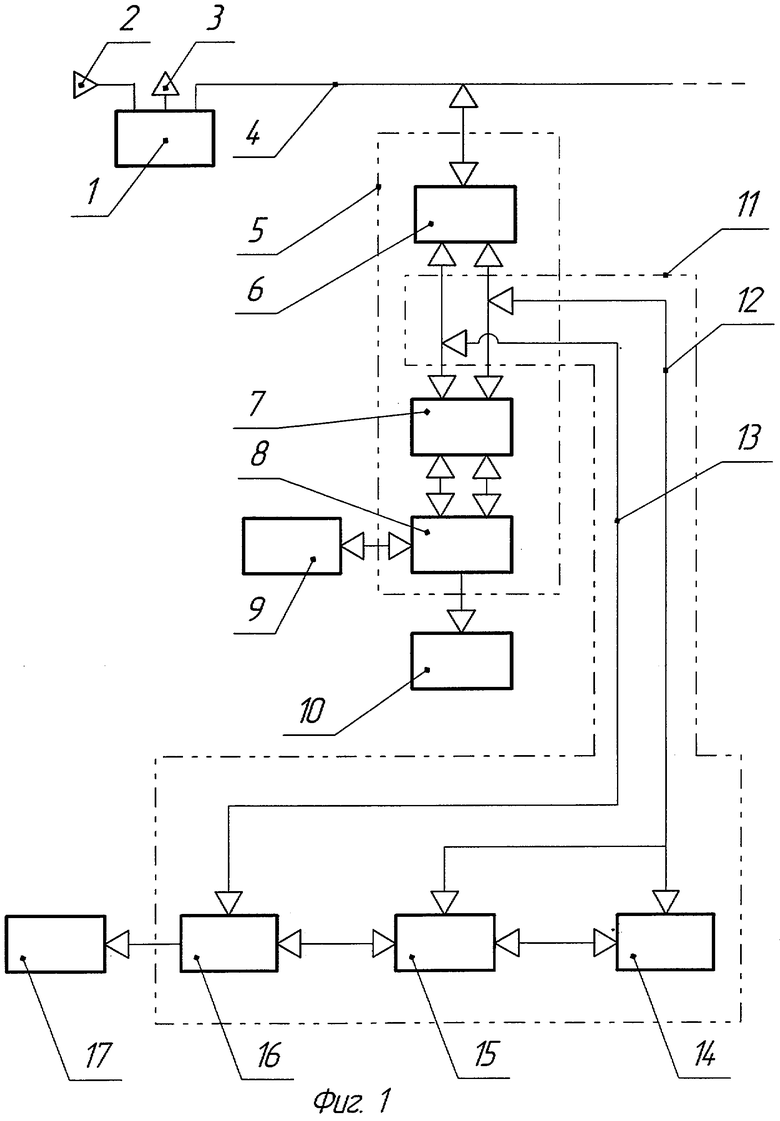
| Иноземцев В.Г., Казаринов В.М., Ясенцев В.Ф | |||
| Автоматические тормоза | |||
| Учебник для вузов ж.-д | |||
| транспорта | |||
| - М.: Транспорт, 1981 | |||
| ПНЕВМАТИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2241617C1 |
| ТОРМОЗНАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНОГО ТЯГОВОГО СРЕДСТВА | 1992 |
|
RU2020096C1 |
| СВЕТОДИОД С ТЕРМОЧУВСТВИТЕЛЬНЫМ ОСЛАБЛЕНИЕМ СВЕТИМОСТИ ПО ЛИНИИ ЧЕРНОГО ТЕЛА | 2016 |
|
RU2702855C2 |

