Изобретение относится к радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС).
Особенностью современных РЛС является применение в них твердотельных передающих устройств, строящихся на базе высокочастотных модулей с применением мощных транзисторов. Удовлетворительное использование возможностей мощных транзисторов достигается при определенной скважности зондирующих импульсов, порядка 10. При частоте повторения 200-250 Гц длительность зондирующего импульса составляет 400-500 мкс. Так как во время излучения вход приемника заблокирован антенным коммутатором, то сигналы, отраженные от целей, находящихся на дальностях менее 60 км (что соответствует длительности зондирующего импульса 400 мкс), будут усеченными и их обработка в согласованном фильтре будет неоптимальной, приводящей, во-первых, к потерям сигнала и, во-вторых, к ухудшению точности измерения дальности и разрешающей способности по дальности. Одним из возможных вариантов решения указанной проблемы является излучение не одной, а двух последовательностей зондирующих импульсов - основной и дополнительной. Длительность импульсов основной последовательности τ0 выбирается из условия обеспечения требуемого энергетического потенциала РЛС, а длительность импульсов дополнительной последовательности τ1 - из условия обеспечения обнаружения целей на относительно малых дальностях, причем τ1<<τ0.
При использовании двух последовательностей зондирующих импульсов вся рабочая зона РЛС разбивается на два участка: ближнюю зону (от минимальной дальности действия РЛС Дмин до дальней границы ближней зоны Дбз), в которой используются импульсы дополнительной последовательности, и дальнюю зону (от дальней границы ближней зоны Дбз до максимальной дальности действия РЛС Дмакс), в которой используются импульсы основной последовательности. Минимальное значение дальности Дбз при этом составляет  , где с - скорость света, а максимальное ее значение определяется размерами зоны местных предметов для конкретной позиции РЛС.
, где с - скорость света, а максимальное ее значение определяется размерами зоны местных предметов для конкретной позиции РЛС.
Известно устройство первичной обработки сигналов РЛС, использующее две последовательности зондирующих импульсов [1]. В качестве импульсов как основной, так и дополнительной последовательностей могут использоваться любые сложные сигналы: линейно-частотно-модулированные (ЛЧМ), фазоманипулированные (ФМ) и др. Основным недостатком этого аналога является то, что он касается лишь одной части РЛС - устройства первичной обработки сигналов РЛС.
Известна также подвижная наземная двухкоординатная РЛС кругового обзора метрового диапазона волн [2], принятая за прототип, в которой для обзора пространства также используют две последовательности зондирующих импульсов. Импульсы основной последовательности обеспечивают обнаружение сигналов в дальней зоне, а импульсы дополнительной последовательности - в ближней зоне. В этой РЛС используются основная и компенсационная антенны, передающее твердотельное устройство с двумя формирователями сложных сигналов для дальней и ближней зон на фиксированной высокой частоте в пределах полосы частот РЛС, приемные устройства основного и компенсационного каналов, устройства первичной и вторичной обработки принятых сигналов, устройства отображения и сопряжения с потребителем. Основным недостатком прототипа является существенное уменьшение дальности обнаружения целей при работе РЛС в условиях прицельных по частоте активных шумовых помех (АШП), а также при наличии флуктуации эффективной площади рассеяния (ЭПР) цели, что связано с увеличением в этих условиях потерь полезного сигнала.
Для уменьшения потерь, связанных с наличием флуктуации ЭПР цели, а также с воздействием прицельных по частоте АШП, в РЛС применяются многочастотные способы работы [3], при которых рабочая частота излучаемого сигнала изменяется от такта к такту по заранее заданному закону (возможна также случайная последовательность смены частоты).
При этом происходит усреднение флуктуации ЭПР цели и соответствующее уменьшение потерь отраженного сигнала. Кроме этого при наличии постановщиков АШП (ПАП), быстрое изменение частоты зондирующего сигнала заставляет ПАП перейти от прицельных по частоте помех к заградительным, распределенным по полосе частот РЛС, что уменьшает мощность помехи на каждой рабочей частоте и соответствующие потери в обнаружении целей.
Однако изменение рабочей частоты от такта к такту приводит к ухудшению эффективности защиты от естественных пассивных помех в зоне местных предметов, требующей жесткой межтактовой амплитудно-фазовой корреляции помехового сигнала, отраженного от местного предмета.
Техническим результатом предлагаемого изобретения является улучшение эффективности работы РЛС при флуктуациях ЭПР обнаруживаемых объектов, а также в условиях прицельных по частоте АШП в дальней зоне работы при сохранении качества подавления помеховых сигналов, отраженных от местных предметов в ближней зоне работы РЛС.
Для достижения указанного технического результата в патентуемой РЛС предлагается такой способ обзора, при котором в дальней зоне станция работает с поимпульсной перестройкой частоты излучаемого сложного, например, ЛЧМ сигнала, а в ближней зоне, пораженной мешающими отражениями от местных предметов - на фиксированной частоте сложного сигнала, обеспечивая необходимую амплитудно-фазовую стабильность излучаемого сигнала от такта к такту.
Для реализации алгоритмов с поимпульсной перестройкой частоты в дальней зоне, передающее устройство РЛС должно реализовывать формирование сигнала на высокой частоте, изменяющейся от импульса к импульсу в дальней зоне, а приемное устройство обеспечивать частотную селекцию и преобразование в цифровой код принятого высокочастотного сигнала.
Используемый в прототипе способ построения приемного тракта, так называемый «приемник прямого усиления» [4, 5], реализует усиление, частотную селекцию и преобразование в цифровой код принятого сигнала непосредственно на высокой частоте работы РЛС. Недостатком приемника прямого усиления является сложность обеспечения высокого усиления, качественной селекции, а также аналого-цифрового преобразования сигнала в широкой полосе, что затрудняет его реализацию в РЛС коротковолнового (дециметрового, сантиметрового) диапазона длин волн.
По аналогичной схеме в прототипе реализовано построение передающего тракта, в котором ЛЧМ сигнал, сформированный на высокой частоте, поступает на твердотельное передающее устройство, реализующее фильтрацию и усиление на рабочей частоте сформированного ЛЧМ импульса.
Более рациональным, с точки зрения усиления и фильтрации, является использование широко распространенного приемника супергетеродинного типа [4, 5], в котором отраженный эхо-сигнал с помощью генератора высокой частоты и смесителя переносится на промежуточную частоту (от 30 до 300 МГц), затем после предварительной фильтрации усиливается и поступает на вход аналого-цифрового преобразователя, работающего с частотой дискретизации, согласованной по полосе с промежуточной частотой принимаемого сигнала. В связи с этим в патентуемом устройстве предлагается использовать построение приемного тракта по схеме приемника супергетеродинного типа, что позволит повысить эффективность усиления и фильтрации принимаемого сигнала и снизить требования к быстродействию устройств аналого-цифрового преобразования.
Соответствующим образом в патентуемом устройстве построен передающий тракт, в котором излучаемый импульс формируется на промежуточной частоте того же значения, что и промежуточная частота приемного тракта, после чего с помощью генератора высокой частоты, используемого в приемном тракте, и смесителя преобразуется на высокую частоту, усиливается и с помощью антенны РЛС излучается в пространство.
Таким образом, используя в патентуемом устройстве указанное построение приемо-передающего тракта, задача реализации обзора РЛС с поимпульсной перестройкой частоты в дальней зоне сводится к изменению частоты генератора синусоидального сигнала от такта к такту в дальней зоне таким образом, чтобы на выходе передающего устройства формируемый сложный сигнал излучался на нужной рабочей частоте. При этом в приемном устройстве, использующем сигнал этого же генератора, эхо-сигнал, отраженный от цели на рабочей частоте, изменяющейся от такта к такту, после преобразования в смесителе приемного устройства будет поступать на вход устройства АЦП всегда на одной и той же промежуточной частоте.
Для сохранения эффективности подавления мешающих эхо-сигналов, отраженных от местных предметов в ближней зоне, управляемый генератор синусоидальных сигналов высокой частоты в приемо-передающем тракте должен формировать сигнал фиксированной частоты, что обеспечит работу РЛС в ближней зоне на постоянной частоте от такта к такту.
В настоящее время существует технологическая возможность использовать программируемые генераторы высокой частоты, параметры которых могут изменяться во времени, обеспечивая тем самым возможность изменения частоты в дальней зоне. При этом управление генератором может осуществляться как в реальном времени, так и по заранее заданному закону, с формированием, в том числе, случайных частотных последовательностей в дальней зоне, что существенно увеличивает эффективность работы РЛС в условиях воздействия прицельных по частоте АШП.
Для формирования сигнала на постоянной частоте в ближней зоне работы может быть использован второй генератор, работающий на фиксированной частоте. При этом для обеспечения когерентности излучаемого ЛЧМ импульса и принимаемого эхо-сигнала, отраженного от цели, сигналы с обоих генераторов должны подаваться на приемное устройство через управляемый коммутатор, задача которого будет сводиться к последовательной подаче сигналов генератора в дальней и ближней зонах на приемное устройство РЛС.
Таким образом, для решения указанных задач в патентуемой РЛС реализуется способ обзора с поимпульсной перестройкой рабочей частоты в дальней зоне с одновременной работой на постоянной частоте в ближней зоне РЛС. При этом для уменьшения трудности технической реализации устройство приемо-передающего тракта выполнено по супергетеродинной схеме и использует управляемый генератор перестраиваемой частоты с преобразованием принимаемых сигналов на промежуточную частоту с последующим их аналого-цифровым преобразованием.
Структурная схема одного из возможных устройств, реализующего предлагаемый способ обзора, его состав и связи приведены на фигуре. Здесь введены следующие обозначения:
1 - антенна основная (АО);
2 - формирователь сигналов для дальней зоны (ФСД);
3 - смеситель для дальней зоны (СМД);
4 - генератор синусоидального сигнала для дальней зоны (ГСД);
5 - приемник основного канала (ПРО);
6 - устройство отображения (УО);
7 - твердотельное передающее устройство (ТПУ);
8 - коммутатор синусоидальных сигналов (КСС);
9 - устройство первичной обработки радиолокационных сигналов (УПО);
10 - антенна компенсационная (АК);
11 - формирователь сигналов для ближней зоны (ФСБ);
12 - смеситель для ближней зоны (СМБ);
13 - генератор синусоидального сигнала для ближней зоны (ГСБ);
14 - приемник компенсационного канала (ПРК);
15 - устройство вторичной обработки и сопряжения (УВОС).
На фигуре для упрощения не показаны сигналы синхронизации работы РЛС.
Как видно из структурной схемы устройства обзора пространства в РЛС, выход ТПУ 7 соединен с входом АО 1, выход которой через ПРО 5 соединен с первым входом УПО 9, а выход АК 10 чрез ПРК 14 - со вторым входом УПО 9, выход которого соединен со входами УО 6 и УВОС 15, выход которого является выходом всего устройства. Первые входы СМД 3 и СМБ 12 соединены с выходами ФСД 2 и ФСБ 11, соответственно, вторые их входы - с выходами ГСД 4 и ГСБ 13, соответственно, а выходы, соответственно, - с первым и вторым входами ТПУ 7.
Кроме того, выходы ГСД 4 и ГСБ 13 соединены, соответственно, с первым и вторым входами КСС 8, выход которого соединен со вторыми входами ПРО 5 и ПРК 14
Для получения вышеуказанного технического результата, в отличие от прототипа, формирование сигнала осуществляется в ФСД 2 и ФСБ 11 на промежуточной частоте, после чего с использованием синусоидальных сигналов, формируемых в ГСД 4 и ГСБ 13, в смесителях СМД 3 и СМБ 12, соответственно, реализуется преобразование сигналов дальней и ближней зон на рабочую частоту. При этом ГСД 4 имеет возможность изменения частоты синусоидального сигнала от такта к такту, а ГСБ 13 работает на постоянной частоте. Кроме этого в приемных устройствах основного канала ПРО 5 и компенсационного канала ПРК 14 происходит преобразование эхосигнала, принятого антеннами АО 1 и АК 10, с рабочей частоты на промежуточную с использованием генераторов синусоидальных сигналов ГСД 4 и ГСБ 13, что позволяет реализовать когерентный прием отраженного от цели эхосигнала на рабочей частоте излучаемого сигнала в дальней и ближней зонах работы РЛС.
Заявляемое устройство, использующее патентуемый способ обзора, работает следующим образом.
Зондирование пространства осуществляется двумя последовательностями импульсов: основной, длительность импульсов которой выбирается из условия обеспечения требуемого энергетического потенциала РЛС, и дополнительной последовательности коротких импульсов, предназначенной для обнаружения радиолокационных целей, находящихся в ближней зоне на дальностях, соответствующих зоне местных предметов. Обе последовательности импульсов имеют одинаковую частоту повторения, но смещены по времени. Рабочая частота излучаемого сигнала дальней зоны изменяется от такта к такту по заранее заданному закону. Рабочая частота излучаемого сигнала ближней зоны является фиксированной.
В качестве импульсов как основной, так и дополнительной последовательности можно использовать любые сложные сигналы (частотно-модулированные, фазоманипулированные и др.).
Эти сигналы с формирователей ФСД 2 и ФСБ 11 поступают на первые входы смесителей сигналов СМД 3 и СМБ 12, соответственно, которые, используя синусоидальные сигналы, подаваемые на их вторые входы, соответственно, с ГСД 4 и ГСБ 13, преобразуют указанные импульсы с промежуточной частоты на высокую частоту (рабочую), после чего сформированные импульсы дальней и ближней зоны подаются на первый и второй входы ТПД 7, который усиливает, осуществляет фильтрацию сигналов и через антенный коммутатор (не показан на фигуре) передает на АО 1, откуда сформированные сигналы излучаются в пространство.
Отраженные от цели эхосигналы, а также помеховые сигналы через основную и компенсационную антенны АО 1 и АК 10 поступают в приемники основного и компенсационного каналов ПРО 5 и ПРК 14, на вторые входы которых через коммутатор КСС 8 подаются синусоидальные сигналы дальней и ближней зоны, сформированные в ГСД 4 и ГСБ 13, соответственно. Коммутатор синусоидальных сигналов 8 является управляемым устройством, осуществляющим во время приема эхосигналов целей в дальней зоне передачу синусоидального сигнала с ГСД 4, а в момент приема эхосигналов целей в ближней зоне - передачу синусоидального сигнала с ГСБ 13, что позволяет реализовать когерентный прием отраженного от цели эхосигнала на рабочей частоте излучаемого сигнала в дальней и ближней зонах работы РЛС.
В приемниках основного и компенсационного каналов ПРО 5 и ПРК 14 отраженные эхосигналы преобразуются на промежуточную частоту, усиливаются, селектируются по частоте и преобразуются в цифровой код, после чего поступают на вход устройства первичной обработки информации УПО 9.
Построение устройства первичной обработки УПО 9 аналогично прототипу. В нем реализуются блок пеленга постановщика активных помех, многоканальный автокомпенсатор, обеспечивающий подавление сигналов АШП, после чего отдельно для каждой из последовательности импульсов (основной и дополнительной в дальней и ближней зонах, соответственно) осуществляется обнаружение и подавление несинхронной импульсной помехи, оптимальная внутрипериодная обработка эхосигналов сложным, например, ЛЧМ фильтром, а также оптимальная межпериодная обработка азимутального пакета эхосигналов. При этом в ближней зоне работы РЛС в УПО 9 реализуется защита РЛС от пассивных помех в зоне местных предметов.
Далее в УПО 9 осуществляется объединение информации из дальней и ближней зоны, реализуются устройство подавления сигналов, принятых боковыми лепестками диаграммы направленности основной антенны, устройство измерения координат, после чего информация о цели выдается на УО 6 для ее отображения и УВОС 15 для вторичной обработки и выдачи на сопрягаемые системы первичной и вторичной радиолокационной информации.
В соответствии с материалами заявки изготовлен опытный образец РЛС, испытания которого подтвердили возможность достижения указанного технического результата.
Таким образом, благодаря использованию перестраиваемых по частоте зондирующих импульсов при обзоре пространства в дальней зоне РЛС, а при работе в ближней зоне - зондирующих импульсов на фиксированной частоте, достигнут вышеуказанный технический результат, а именно улучшение эффективности работы РЛС при флуктуациях ЭПР объектов и в условиях прицельных по частоте АШП при сохранении степени подавления помеховых сигналов, отраженных от местных предметов в ближней зоне работы РЛС.
Список литературы
1. Патент РФ №2305853, опубл. 10.09.2007, бюл. №25 «Устройство первичной обработки сигналов РЛС, использующей две последовательности зондирующих импульсов»;
2. Патент РФ №2256190, опубл. 10.07.2005, бюл. №19 «Подвижная наземная двухкоординатная РЛС кругового обзора метрового диапазона волн» (прототип);
3. Витин Г.М. Многочастотная радиолокация. М.: Воениздат, 1973;
4. М.З. Арсланов, В.Ф. Рябков. Радиоприемные устройства. М., «Советское радио», 1972;
5. Радиоприемные устройства. Под редакцией В.И. Сифорова. М., «Советское радио», 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2341813C2 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ | 2015 |
|
RU2577845C1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| СПОСОБ АДАПТИВНОГО ОБЗОРА ЗОНЫ ДЕЙСТВИЯ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2018 |
|
RU2701377C1 |
| СПОСОБ РАДИОЭЛЕКТРОННОЙ ЗАЩИТЫ НАЗЕМНОЙ РЛС КРУГОВОГО ОБЗОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2586112C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕСОВОГО КОЭФФИЦИЕНТА В УСЛОВИЯХ НЕСТАЦИОНАРНОСТИ ПОМЕХОВОЙ ОБСТАНОВКИ | 2022 |
|
RU2807614C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2661889C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
Изобретение относится к радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС). Достигаемый технический результат - улучшение эффективности работы РЛС при флуктуациях эффективной площади рассеяния (ЭПР) обнаруживаемых объектов, а также в условиях прицельных по частоте активных шумовых помех (АШП) в дальней зоне работы при сохранении качества подавления помеховых сигналов, отраженных от местных предметов в ближней зоне работы РЛС. Указанный технический результат достигается за счет использования для обзора дальней и ближней рабочих зон РЛС двух последовательностей импульсов, которые формируют на промежуточной частоте и после смешивания их с синусоидальными сигналами высокой частоты и фильтрации преобразуют в зондирующие импульсы, при этом обзор дальней зоны производят, перестраивая поимпульсно рабочую частоту зондирующих импульсов путем изменения высокой частоты синусоидальных сигналов от такта к такту, а обзор ближней зоны - на постоянной рабочей частоте, затем принятый отраженный сигнал смешивают с высокочастотным синусоидальным сигналом своей зоны, преобразуя его на промежуточную частоту, фильтруют и, после аналого-цифрового преобразования, подвергают обработке. Устройство, реализующее способ, состоит из основной и компенсационной антенн, двух формирователей сигналов, двух смесителей, двух генераторов синусоидального сигнала, твердотельного передающего устройства, приемников основного и компенсационного каналов, коммутатора синусоидальных сигналов, устройств первичной обработки, отображения, вторичной обработки и сопряжения, с соответствующими связями. 2 н.п. ф-лы, 1 ил.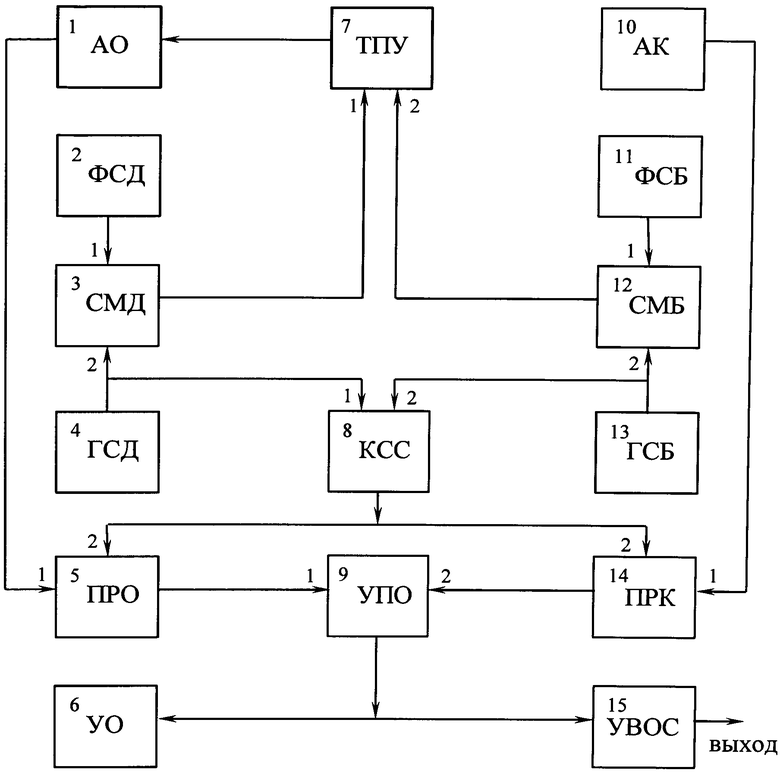
1. Способ обзора пространства в РЛС, заключающийся в формировании и излучении двух последовательностей зондирующих импульсов для обзора дальней и ближней рабочих зон РЛС и последующем приеме и обработке отраженных сигналов, отличающийся тем, что обе последовательности сигналов формируют на промежуточной частоте и после смешивания их с синусоидальными сигналами высокой частоты и фильтрации преобразуют в зондирующие импульсы в полосе рабочих частот РЛС, при этом обзор дальней зоны производят, перестраивая поимпульсно рабочую частоту зондирующих импульсов путем изменения высокой частоты синусоидальных сигналов от такта к такту, а обзор ближней зоны - на постоянной рабочей частоте, затем принятый отраженный сигнал смешивают с высокочастотным синусоидальным сигналом своей зоны, преобразуя его на промежуточную частоту, фильтруют и, после аналого-цифрового преобразования, подвергают обработке.
2. Устройство обзора пространства в РЛС, содержащее основную (АО) и компенсационную (АК) антенны, твердотельное передающее устройство (ТПУ), формирователи сложных сигналов для дальней (ФСД) и ближней (ФСБ) зон, приемники основного (ПРО) и компенсационного (ПРК) каналов, устройство первичной обработки (УПО), устройство отображения (УО) и устройство вторичной обработки и сопряжения (УВОС), причем выход ТПУ соединен с входом АО, выход которой через ПРО соединен с первым входом УПО, а выход АК через ПРК - со вторым входом УПО, выход которого соединен со входами УО и УВОС, выход которого является выходом устройства, отличающееся тем, что в него введены смесители для дальней (СМД) и ближней (СМБ) зон, генераторы синусоидального сигнала высокой частоты для дальней (ГСД) и ближней (ГСБ) зон и коммутатор синусоидальных сигналов (КСС), при этом первые входы СМД и СМБ соединены с выходами ФСД и ФСБ, соответственно, вторые их входы - с выходами ГСД и ГСБ, соответственно, а выходы, соответственно, - с первым и вторым входами ТПУ, выходы ГСД и ГСБ соединены также, соответственно, с первым и вторым входами КСС, выход которого соединен со вторыми входами ПРО и ПРК.
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| АВТОМАТИЧЕСКАЯ СТАНЦИЯ ОТВЕТНЫХ ПОМЕХ | 1994 |
|
RU2103705C1 |
| Передающая антенна бегущей волны | 1931 |
|
SU29198A1 |
| Устройство для стереограмметрической съемки | 1936 |
|
SU49285A1 |
| КНОПОЧНЫЙ ВЫКЛЮЧАТЕЛЬ | 1945 |
|
SU69362A1 |
| Стабилизатор электрического сигнала | 1981 |
|
SU1003049A1 |
| JP 2060245 A, 28.02.1990 | |||
| US 5506582 A, 09.04.1996 | |||

