Предполагаемое изобретение относится к емкостям для размещения в них изделий специальной техники, а более конкретно, для размещения космических аппаратов при их транспортировке и хранении.
Известен контейнер для размещения в нем космического аппарата в вертикальном положении, содержащий основание с опорным переходником для установки космического аппарата, снабженным системой амортизации, проставку с закрепленными на ней компенсаторами бокового положения космического аппарата, выполненными в виде жестких тяг, и крышку (см. чертеж 11Ф617.9310-0СБ, КБ "Полет", 1984 г.). Недостатком данного контейнера является то, что под действием транспортных поперечных перегрузок, а также при перепадах температуры происходит С-образный изгиб продольной оси космического аппарата, перевозимого в контейнере, что вызывает значительное локальное нагружение космического аппарата в зоне крепления к нему жестких тяг и может привести к разрушению космического аппарата либо к нарушению работоспособности его бортовых систем.
Известен также контейнер для размещения в нем космического аппарата в вертикальном положении по заявке №2002119781/12(020707) от 20.02.2004 г. (положительное решение №2002119781/12(020707) от 17.05.2004 г.), содержащий основание с опорным переходником для установки космического аппарата, снабженным системой амортизации, проставку с закрепленными на ней компенсаторами бокового положения космического аппарата, выполненными в виде горизонтально расположенных регулируемых штанг, снабженных опорными роликами, установленными с возможностью взаимодействия их контактных поверхностей с космическим аппаратом, и крышку. Конструктивное исполнение данного контейнера исключает деформирование продольной оси космического аппарата при изменении температуры окружающей среды и, кроме того, при условии номинальной регулировки компенсаторов бокового положения космического аппарата (регулируемых штанг с опорными роликами) снижает напряжения в конструкции космического аппарата под действием транспортных поперечных перегрузок.
Недостатком данного устройства является сложность регулировки компенсаторов бокового положения космического аппарата (регулируемых штанг с опорными роликами). Превышение расчетного усилия при данной регулировке приводит либо к изгибу (деформации) продольной оси космического аппарата под действием транспортных поперечных перегрузок, либо к возникновению значительных контактных усилий в зоне взаимодействия опорных роликов с элементами силовой конструкции космического аппарата. Подведение же опорных роликов к элементам силовой конструкции космического аппарата с усилием менее расчетного приводит к вибронагружению (биению) в стыке "опорный ролик - космический аппарат".
Кроме того, даже при точной регулировке компенсаторов бокового положения космического аппарата (регулируемых штанг с опорными роликами), наблюдается быстрый износ контактной поверхности опорных роликов, покрытых металлизированной пленкой, наносимой на упругий материал, например резину, что требует регулярной замены опорных роликов.
Целью предлагаемого изобретения является повышение эксплуатационных характеристик (снижение виброударного нагружения космического аппарата при транспортировке, а также повышение надежности и увеличение рабочего ресурса системы амортизации космического аппарата) контейнера.
Поставленная цель достигается тем, что в контейнере для вертикальной транспортировки космического аппарата, содержащем основание с установленным на нем опорным переходником для установки космического аппарата, снабженным системой амортизации, компенсаторы бокового положения космического аппарата, проставку и крышку, опорный переходник связывается с основанием посредством сферического шарнира. При этом компенсаторы бокового положения выполняются в виде пружин растяжения, одни концы которых закрепляются на опорном переходнике, а другие концы закрепляются на приемной раме, установленной на основании. Боковая поверхность опорного переходника выполняется в виде сферического сегмента выпуклой формы, контактирующего с ответными сферическими пятами вогнутой формы, выполненными на приемной раме. Радиус кривизны сферического сегмента равняется радиусам кривизны сферических пят. Сферические пяты размещаются симметрично относительно двух взаимно перпендикулярных вертикальных плоскостей, проходящих через ось симметрии сферического шарнира. На приемной раме устанавливаются упоры с возможностью их взаимодействия с нижним торцем опорного переходника. Также на приемной раме устанавливаются технологические фиксаторы с возможностью размещения их конических головок в приемных гнездах, выполненных на опорном переходнике.
Предлагаемое устройство поясняется чертежами.
На фиг.1 представлен продольный разрез предлагаемого контейнера с установленным в нем космическим аппаратом в исходном положении (при отсутствии воздействия на него транспортных поперечных перегрузок).
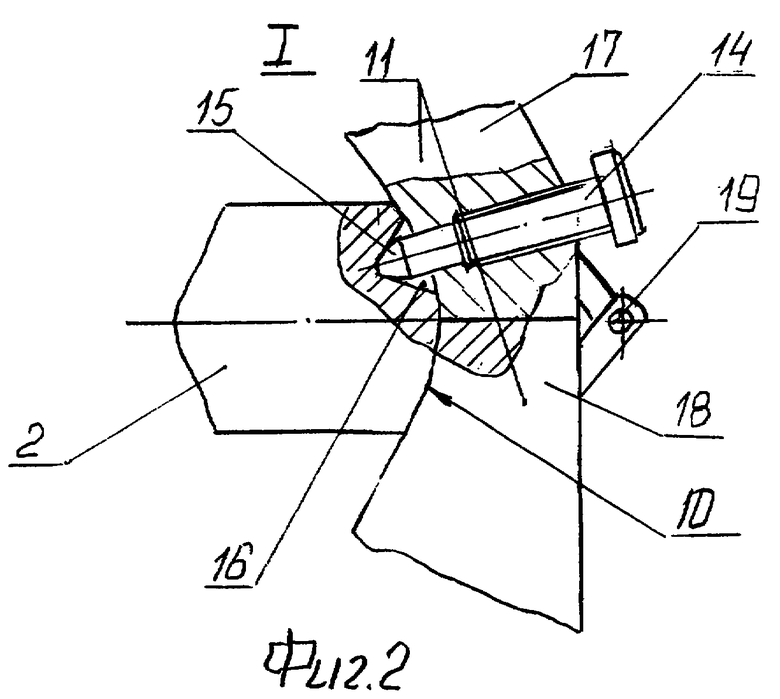
На фиг.2 показан выносной элемент I согласно фиг.1.
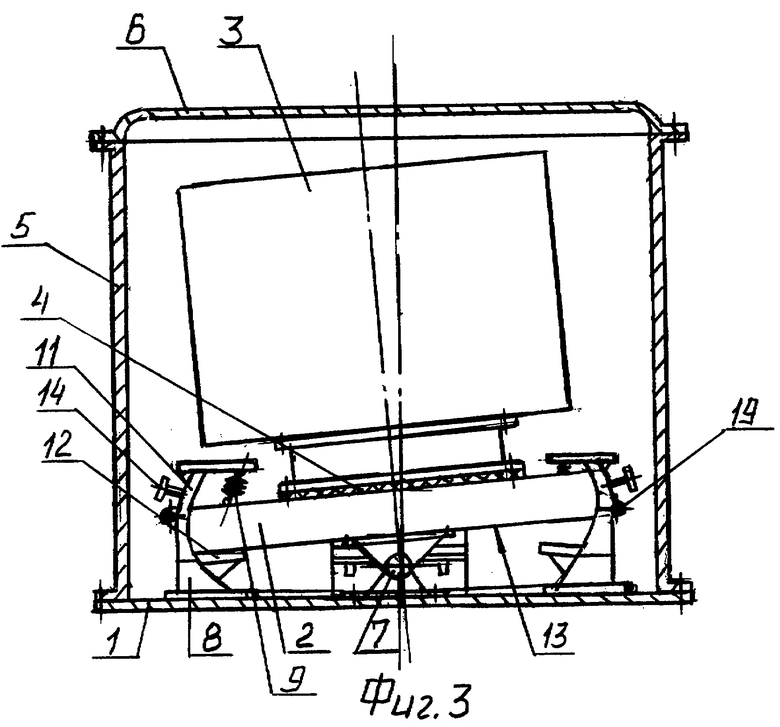
На фиг.3 изображен продольный разрез предлагаемого контейнера при воздействии на космический аппарат поперечных перегрузок при транспортировке.
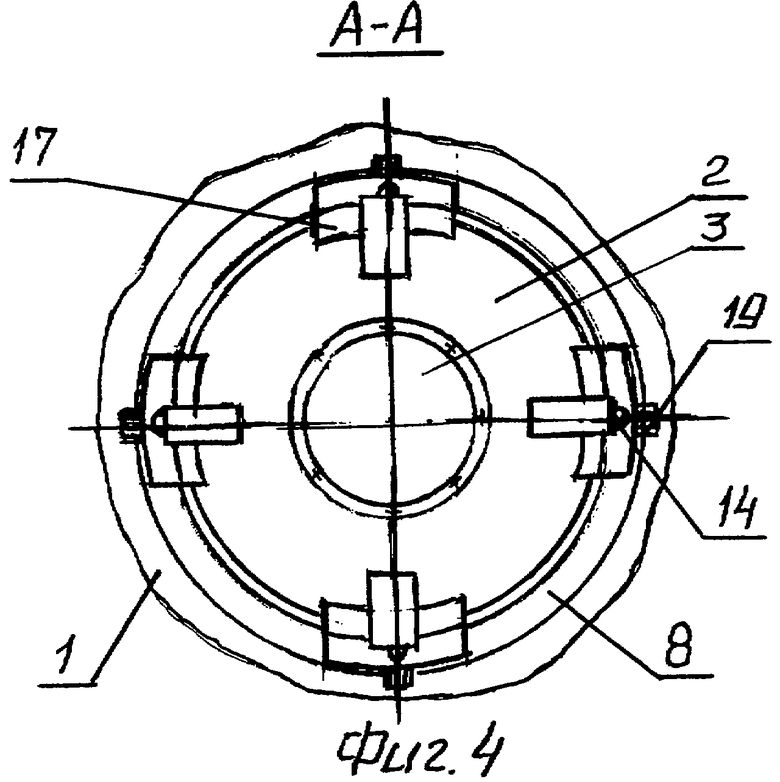
На фиг.4 представлен разрез А-А согласно фиг.1.
Контейнер содержит основание 1 (фиг.1) с опорным переходником 2 для установки космического аппарата 3, снабженным системой амортизации 4. К основанию 1 закреплена проставка 5, на которую установлена крышка 6. Опорный переходник 2 связан с основанием 1 посредством сферического шарнира 7 (фиг.1). На основании 1 установлена приемная рама 8 (фиг.1). Опорный переходник 2 и приемная рама 8 соединены между собой компенсаторами бокового положения 9 (фиг.1), выполненными в виде пружин растяжения, одни концы которых закреплены на опорном переходнике 2, а другие концы закреплены на приемной раме 8, установленной на основании 1. Боковая поверхность 10 (фиг.2) опорного переходника 2 выполнена в виде сферического сегмента выпуклой формы, контактирующего с ответными сферическими пятами 11 (фиг.2) вогнутой формы, выполненными на приемной раме 8. Радиус кривизны боковой поверхности 10 (сферического сегмента) равен радиусам кривизны сферических пят 11. Сферические пяты 11 размещены (фиг.4) симметрично относительно двух взаимно перпендикулярных вертикальных плоскостей, проходящих через ось симметрии сферического шарнира 7. На приемной раме 8 установлены упоры 12 (фиг.3) с возможностью их взаимодействия с нижним торцем 13 опорного переходника 2. Также на приемной раме 8 установлены технологические фиксаторы 14 (фиг.2) с возможностью размещения их конических головок 15 в приемных гнездах 16, выполненных на опорном переходнике 2.
Предлагаемое устройство функционирует следующим образом.
Конические головки 15 технологических фиксаторов 14 вводятся в приемные гнезда 16 опорного переходника 2, тем самым фиксируя его горизонтальное положение (фиг.2). При этом все компенсаторы бокового положения (пружины растяжения) 9 находятся в исходном (номинальном) положении. После этого космический аппарат 3 устанавливается вертикально краном (не показан) на опорный переходник 2 (фиг.1) и крепится к нему (элементы крепления не показаны) через систему амортизации 4. Конические головки 15 технологических фиксаторов 14 выводятся из приемных гнезд 16 опорного переходника 2. Затем краном (не показан) производится последовательная установка (и закрепление) проставки 5 и крышки 6 (фиг.1). Тем самым контейнер подготовлен к транспортировке.
При действии поперечных нагрузок в процессе транспортировки опорный переходник 2 с закрепленным на нем космическим аппаратом 3 будет стремиться повернуться в вертикальной плоскости на сферическом шарнире 7 и занять равновесное наклонное положение. При повороте опорного переходника 2 (фиг.3) в зависимости от направления действия поперечных нагрузок (а значит и наклона космического аппарата 3) включаются в работу соответствующие компенсаторы бокового положения 9 (пружины растяжения), которые после окончания действия поперечных перегрузок вернут опорный переходник 2 с космическим аппаратом 3 в горизонтальное положение. Предельные отклонения опорного переходника 2 с космическим аппаратом 3 от горизонтального положения зависят от действующих поперечных перегрузок и определяются высотой космического аппарата 3. Для исключения неоправданного увеличения поперечных габаритных размеров контейнера предельные угловые отклонения опорного переходника 2 ограничиваются величиной 8-10°. Например, для космического аппарата 3 высотой 1000 мм увеличение поперечных размеров контейнера составит 280...340 мм. Из этого условия выбирается угол установки компенсаторов бокового положения 9 (пружин растяжения), их количество и производится расчет их жесткостных характеристик при воздействии на космический аппарат 3 максимальных транспортировочных поперечных перегрузок.
В процессе транспортировки космического аппарата 3 при повороте опорного переходника 2 на сферическом шарнире 7 боковая поверхность 10 опорного переходника 2 взаимодействует с ответными сферическими пятами 11 (фиг.2) вогнутой формы, выполненными на приемной раме 8. С целью уменьшения трения в зонах контакта сферической боковой поверхности 10 опорного переходника 2 со сферической поверхностью ответных пят 11 приемной рамы 8 на данные поверхности (при необходимости) может быть нанесена смазка или специальное антифрикционное покрытие.
Следует отметить, что взаимодействие боковой поверхности 10 опорного переходника 2 с ответными сферическими пятами 11 позволяет:
- обеспечить удобство первоначальной сборки предлагаемого контейнера;
- уменьшить (рабочий) угол отклонения опорного переходника 2 при действии поперечных перегрузок при транспортировке;
- снизить рабочий ход компенсаторов бокового положения (пружин растяжения) 9.
При воздействии на контейнер нештатных (аварийных) поперечных нагрузок угловое отклонение опорного переходника 2 с закрепленным на нем космическим аппаратом 3 ограничивается упорами 12, установленными на приемной раме 8. С целью уменьшения ударного воздействия на космический аппарат 3 при контакте торца 13 опорного переходника 2 с упорами 12 (в случае действия аварийных перегрузок) на последние устанавливаются противоударные (резиновые) прокладки (не показаны).
Предложенное устройство контейнера с "качающимся" опорным переходником 2 для крепления на нем космического аппарата 3 позволяет компенсировать угловые возмущения (нагрузки), передающиеся на космический аппарат 3 от транспортного средства (не показано) и, тем самым, исключить изгиб продольной оси и уменьшить деформации космического аппарата 3, особенно опасные для его маложестких систем типа панелей солнечных батарей, штанг антенн и т.д. При этом обеспечивается не только снижение виброударного нагружения космического аппарата 3 в процессе транспортировки, но и повышение надежности и увеличение ресурса работы системы амортизации 4 космического аппарата 3.
После прибытия контейнера на космодром производится последовательное снятие краном (не показан) крышки 6 и проставки 5. Конические головки 15 технологических фиксаторов 14 вводятся в приемные гнезда 16 опорного переходника 2, тем самым фиксируя его горизонтальное положение. После этого космический аппарат 3 открепляется от опорного переходника 2 и снимается краном (не показан). Конические головки 15 технологических фиксаторов 14 выводятся из приемных гнезд 16 опорного переходника 2. При помощи крана (не показан) производится последовательная установка проставки 5 и крышки 6. Тем самым контейнер подготовлен к транспортировке в порожнем состоянии.
Следует отметить, что при необходимости (например, для осмотра или обслуживания космического аппарата 3) опорный переходник 2, закрепленный на сферическом шарнире 7, можно повернуть совместно с установленным на нем космическим аппаратом 3 вокруг вертикальной оси на сферическом шарнире 7 (при демонтированных компенсаторах бокового положения 9 (пружинах растяжения) и выведенных из приемных гнезд 16 опорного переходника 2 технологических фиксаторах 14) с последующей фиксацией в новом положении.
Для обеспечения первоначальной сборки предлагаемого контейнера (размещения опорного переходника 2 внутри приемной рамы 8) ответные сферические пяты 11 приемной рамы 8 выполняются разъемными, состоящими из верхних и нижних частей 17 и 18 соответственно, связанных между собой шарнирами 19. После размещения опорного переходника 2 внутри приемной рамы 8 верхние 17 и нижние 18 части ответных сферических пят 11 жестко фиксируются (элементы фиксации не показаны) между собой.
Таким образом, предложенное устройство имеет существенные отличия от ранее известных контейнеров и позволяет повысить их эксплуатационные характеристики, а именно: снизить виброударное нагружение космического аппарата при транспортировке, а также повысить надежность и увеличить рабочий ресурс системы амортизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕР | 2002 |
|
RU2239589C2 |
| КОНТЕЙНЕР | 2008 |
|
RU2389672C1 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИЙ КОНТЕЙНЕР | 2011 |
|
RU2462407C1 |
| КОНТЕЙНЕР | 2006 |
|
RU2332341C1 |
| КОНТЕЙНЕР | 2005 |
|
RU2302364C2 |
| КОНТЕЙНЕР | 2005 |
|
RU2297955C2 |
| ПЛАТФОРМА | 2003 |
|
RU2261810C2 |
| КОНТЕЙНЕР | 2004 |
|
RU2272766C2 |
| ТРАНСПОРТИРОВОЧНЫЙ КОНТЕЙНЕР | 2005 |
|
RU2297958C2 |
| КОНТЕЙНЕР | 2004 |
|
RU2273597C2 |
Изобретение относится к контейнерам для размещения грузов при транспортировке и хранении. Контейнер содержит основание с опорным переходником для установки космического аппарата, снабженным системой амортизации. К основанию закреплена проставка, на которую установлена крышка. Опорный переходник связан с основанием посредством сферического шарнира. На основании установлена приемная рама. Опорный переходник и приемная рама соединены между собой компенсаторами бокового положения, выполненными в виде пружин растяжения, одни концы которых закреплены на опорном переходнике, а другие концы закреплены на приемной раме. Боковая поверхность опорного переходника выполнена в виде сферического сегмента выпуклой формы, контактирующего с ответными сферическими пятами вогнутой формы, выполненными на приемной раме. Радиус кривизны сферического сегмента равен радиусам кривизны сферических пят. Сферические пяты размещены симметрично относительно двух взаимно перпендикулярных вертикальных плоскостей, проходящих через вертикальную ось симметрии сферического шарнира. На приемной раме установлены упоры с возможностью их взаимодействия с нижним торцем опорного переходника. Также на приемной раме установлены технологические фиксаторы с возможностью размещения их конических головок в приемных гнездах. Изобретение позволяет исключить дополнительные нагружения при воздействии перегрузок при транспортировке и температурных деформациях. Снизить виброударные нагружения аппарата при транспортировке. 4 ил.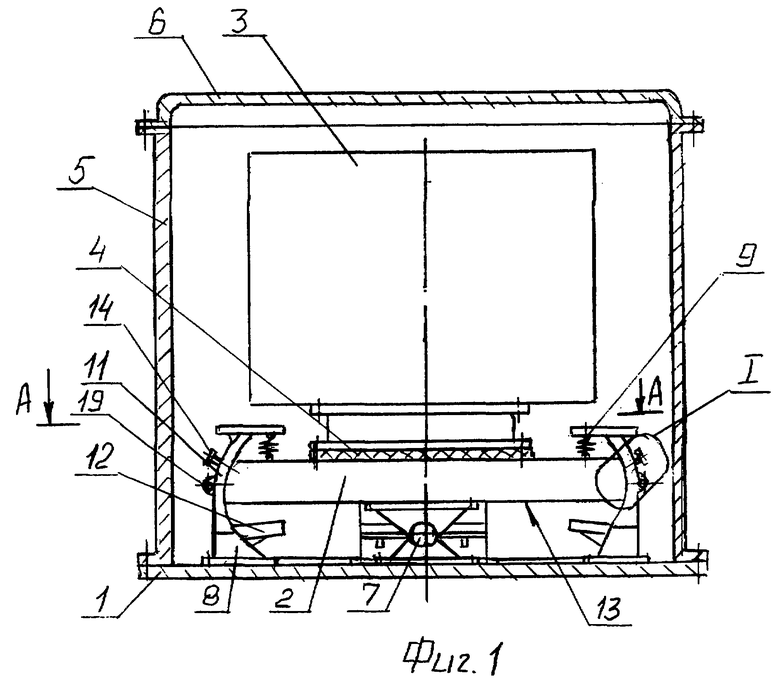
Контейнер для вертикальной транспортировки космического аппарата, содержащий основание с установленным на нем опорным переходником для установки космического аппарата, снабженным системой амортизации, компенсаторы бокового положения космического аппарата, проставку и крышку, отличающийся тем, что опорный переходник связан с основанием посредством сферического шарнира, а компенсаторы бокового положения выполнены в виде пружин растяжения, одни концы которых закреплены на опорном переходнике, а другие концы закреплены на приемной раме, установленной на основании, при этом боковая поверхность опорного переходника выполнена в виде сферического сегмента выпуклой формы, контактирующего с ответными сферическими пятами вогнутой формы, выполненными на приемной раме, а радиус кривизны сферического сегмента равен радиусам кривизны сферических пят, при этом сферические пяты размещены симметрично относительно двух взаимно перпендикулярных вертикальных плоскостей, проходящих через вертикальную ось симметрии сферического шарнира, а на приемной раме установлены упоры с возможностью их взаимодействия с нижним торцом опорного переходника, при этом на приемной раме установлены технологические фиксаторы с возможностью размещения их конических головок в приемных гнездах, выполненных на опорном переходнике.
| RU 2002119781 А, 20.02.2004 | |||
| Цистерна для транспортировки грузов | 1986 |
|
SU1370010A1 |
| КОНТЕЙНЕР | 2000 |
|
RU2217362C2 |
| US 6269963 В1, 07.08.2001. | |||

