Предлагаемое изобретение относится к транспортному оборудованию, а более конкретно к платформам, используемым при перевозке крупногабаритных космических аппаратов с завода-изготовителя на космодром.
Известен вагон (см. 11Т732 ТОИЭ, "Техническое описание и инструкция по эксплуатации", книга 1 издание 2, Торжокский вагоностроительный завод, 1980 г., л.12, 130), содержащий передвижную (выкатную) раму для крепления груза, снабженную амортизаторами продольных перегрузок. Ограниченные размеры поперечного сечения кузова вагона не позволяют транспортировать в нем крупногабаритные грузы.
Известна также платформа (см. ИД. 41-12-2001, "Исходные данные по наземной эксплуатации КА при варианте транспортировки с завода-изготовителя в вертикальном положении", КБ "Полет", 2001 г., л.20), содержащая раму с ходовой частью, переходную площадку для крепления груза, установленную на раме с возможностью перемещения в продольном направлении и взаимодействия с упругими компенсаторами, размещенными на направляющих штырях, установленных на раме по обе стороны переходной площадки посредством внешних и внутренних опорных кронштейнов. Поперечные размеры транспортируемого на платформе груза ограничиваются железнодорожными габаритами (естественно значительно превышающими внутренний габарит кузова вагона).
Однако данная платформа имеет ряд недостатков, к которым относятся:
- сложность монтажа и установки переходной площадки для крепления груза (далее по тексту - переходная площадка) на раме (установка направляющих штырей в гнезда переходной площадки и крепление их на внутренних опорных кронштейнах производится при вывешенной краном над рамой переходной площадке);
- постоянное воздействие на направляющие штыри значительных нагрузок (переходная площадка опирается на направляющие штыри, которые воспринимают всю вертикальную нагрузку от веса переходной площадки и транспортируемого на ней груза);
- низкая ремонтопригодность (для проведения ремонта, замены и технического обслуживания упругих компенсаторов и направляющих штырей необходим трудоемкий демонтаж переходной площадки);
- невозможность компенсации угловых перемещений переходной площадки (перекос переходной площадки приводит к полному или частичному ее заклиниванию на направляющих штырях и, соответственно, к выключению или нештатной работе упругих компенсаторов);
- одностороннее восприятие (рабочий ход в одну сторону) нагрузок упругими компенсаторами (приводит к увеличению габаритных размеров упругих компенсаторов).
Задачей (целью) предлагаемого изобретения являются повышение эксплуатационных характеристик (упрощение монтажа и установки переходной площадки на раме, повышение ремонтопригодности, разгрузка направляющих штырей от действия вертикальных нагрузок от веса переходной площадки с грузом, уменьшение габаритных размеров упругих компенсаторов) и расширение функциональных возможностей (компенсация угловых перемещений переходной площадки) платформы.
Поставленная задача (цель) достигается тем, что на переходной площадке платформы закрепляются несущие штанги, контактирующие своими наружными цилиндрическими поверхностями с эквидистантными поверхностями верхних и нижних фигурных ходовых катков, покрытыми упругим материалом, например резиной. Верхние и нижние фигурные ходовые катки шарнирно устанавливаются на приемных кронштейнах, закрепленных на раме по обе стороны переходной площадки между внутренними опорными кронштейнами. Направляющие штыри связываются с несущими штангами посредством сферических шарниров. На направляющих штырях закрепляются внешние и внутренние толкатели, контактирующие с обращенными к ним торцевыми поверхностями упругих компенсаторов.
Предлагаемое устройство поясняется фиг.1-5.
На фиг.1 представлен общий вид платформы с установленным на переходной площадке грузом.
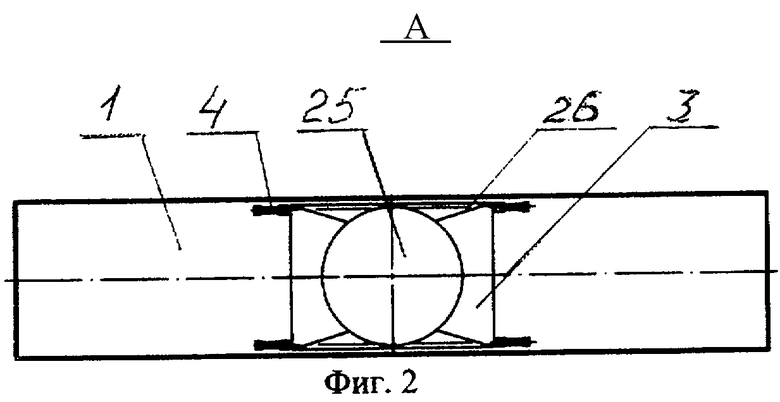
На фиг.2 изображен вид А согласно фиг.1.
На фиг.3 показан выносной элемент I согласно фиг.1.
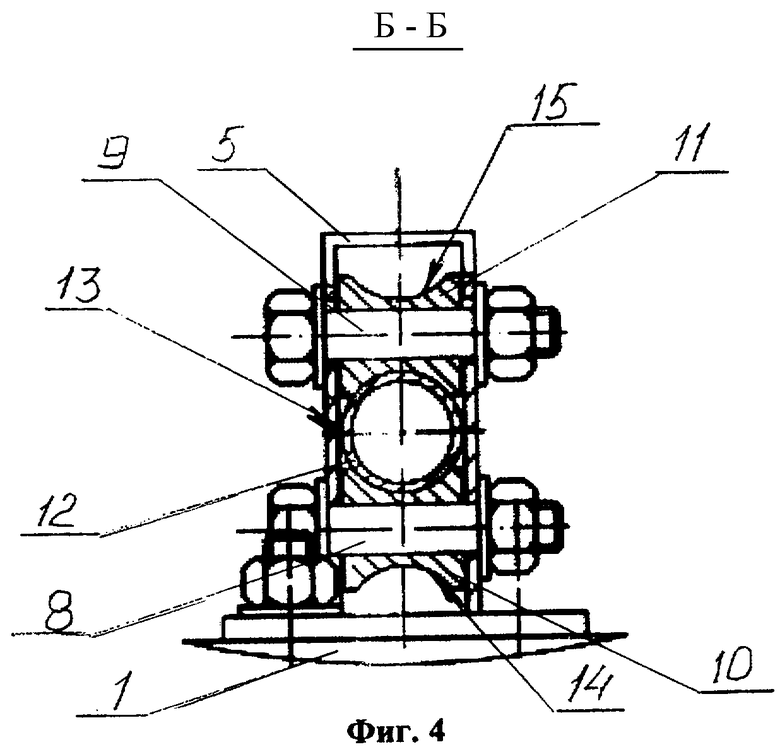
На фиг.4 представлен разрез Б-Б согласно фиг.3.
На фиг.5 изображен выносной элемент II согласно фиг.3.
Платформа содержит раму 1 (фиг.1) с ходовой частью 2, переходной площадкой 3, упругими компенсаторами 4, приемными кронштейнами 5 (фиг.3), внешними 6 и внутренними 7 опорными кронштейнами.
Приемные кронштейны 5 закреплены на раме 1 по обе стороны переходной площадки 3 и снабжены закрепленными, посредством шарниров 8 и 9 (фиг.4), нижних 10 и верхних 11 фигурных ходовых катков соответственно. На переходной площадке 3 закреплены несущие штанги 12 (фиг.3), размещенные в продольном направлении рамы 1 и установленные между нижними 10 и верхними 11 фигурными ходовыми катками.
Несущие штанги 12 контактируют своими наружными цилиндрическими поверхностями 13 (фиг.4) с эквидистантными поверхностями 14 и 15 соответственно нижних 10 и верхних 11 фигурных ходовых катков, покрытых упругим материалом (на фиг. условно не показан), например резиной. Упругие компенсаторы 4 состоят из набора резино-металлических элементов 16 (фиг.5), установленных соосно прорезями 17 на направляющих штырях 18. Направляющие штыри 18 установлены на раме 1 по обе стороны переходной площадки 3 посредством внешних 6 и внутренних 7 опорных кронштейнов и связаны с несущими штангами 12 посредством сферических шарниров 19 (фиг.3). На направляющих штырях 18 соосно установлены внутренние 20 (фиг.5) и внешние 21 толкатели, контактирующие с обращенными к ним торцевыми поверхностями 22 и 23 соответственно упругих компенсаторов 4. Обжатие набора резино-металлических элементов 16 осуществляется гайками 24 (фиг.5), навинченными на направляющие штыри 18.
Предлагаемое устройство функционирует следующим образом.
На переходную площадку 3 краном (на фиг. условно не показан) устанавливается транспортировочный контейнер 25 (фиг.1, 2) с размещенным в нем космическим аппаратом (на фиг. условно не показан). Транспортировочный контейнер 25 закрепляется на переходной площадке 3 при помощи растяжек 26 (фиг.1, 2).
При транспортировке под воздействием продольных нагрузок переходная площадка 3 с закрепленным на ней транспортировочным контейнером 25 перемещается вдоль рамы 1 в направлении действия нагрузок. Несущие штанги 12 переходной площадки 3 перемещаются на вращающихся при этом (на шарнирах 8 и 9) нижних 10 и верхних 11 фигурных ходовых катках. При этом наружные цилиндрические поверхности 13 несущих штанг 12 контактируют (фиг.4) с эквидистантными поверхностями 14 и 15 соответственно нижних 10 и верхних 11 фигурных ходовых катков, на которые нанесено покрытие из упругого материала (на фиг. условно не показан). При своем перемещении несущие штанги 12 толкают (или тянут) направляющие штыри 18, а внутренние 20 и внешние 21 толкатели, установленные на направляющих штырях 18, контактируя (фиг.5) с обращенными к ним торцевыми поверхностями 22 и 23 соответственно упругих компенсаторов 4, сжимают резино-металлические элементы 16, установленные соосно прорезями 17 на направляющих штырях 18. При сжатии резино-металлических элементов 16 роль упора исполняют (фиг.5) внешние 6 или внутренние 7 (в зависимости от направления действия нагрузки) опорные кронштейны. Тем самым производится снижение (демпфирование) продольных нагрузок, действующих на транспортировочный контейнер 25 с размещенным в нем космическим аппаратом (на фиг. условно не показан).
Поперечные (вертикальные и боковые) нагрузки при транспортировке воспринимаются нижними и верхними фигурными ходовыми катками 10 и 11, закрепленными на приемных кронштейнах 5. При этом передача продольных усилий (без рывков и заклинивании) от несущих штанг 12 к направляющим штырям 18 при возможных перекосах (от действия поперечных нагрузок) переходной площадки 3 обеспечивается за счет установки сферических шарниров 19. Вследствие этого поперечные нагрузки при транспортировке не будут влиять на перемещения упругих компенсаторов 4 в продольном направлении рамы 1, а следовательно, на их работоспособность.
При действии поперечных (вертикальных и боковых) нагрузок переходная площадка 3 будет перемещаться "вверх-вниз" и отклоняться от горизонтальной плоскости (так называемая "боковая качка") при сохранении контакта наружных цилиндрических поверхностей 13 несущих штанг 12 с эквидистантными поверхностями 14 и 15 соответственно нижних 10 и верхних 11 фигурных ходовых катков в пределах деформаций упругого материала (например, резины), которым покрыты поверхности 14 и 15 соответственно нижних 10 и верхних 11 фигурных ходовых катков. За счет этого будет происходить снижение (демпфирование) нагрузок на транспортировочный контейнер 25 при его возможных вертикальных перемещениях ("подпрыгиваниях") и угловых качаниях совместно с переходной площадкой 3 относительно рамы 1.
Установка на направляющих штырях 18 внутренних 20 и внешних 21 толкателей, контактирующих соответственно с обращенными к ним торцевыми поверхностями 22 и 23 упругих компенсаторов 4 и сжимающих набор резино-металлических элементов 16, при перемещениях переходной площадки 3 (как вперед, так и назад) обеспечивает постоянную работу последних при знакопеременных (противоположных) направлениях перегрузок. Следовательно, в каждый момент времени постоянно работают все упругие компенсаторы 4, установленные по обе стороны от переходной площадки 3.
Таким образом, предложенное устройство позволяет одновременно снизить (демпфировать) нагрузки на перевозимый транспортировочный контейнер 25 как в продольном направлении (за счет упругих компенсаторов 4), так и в поперечных направлениях (за счет нанесения покрытия на поверхности 14 и 15 соответственно нижних 10 и верхних 11 фигурных ходовых катков упругого материала, например резины).
При необходимости ремонта, технического обслуживания упругих компенсаторов 4, замены их резино-металлических элементов 16 не требуется демонтировать переходную площадку 3.
Таким образом, предложенное устройство имеет существенные отличия от ранее известных платформ для транспортировки крупногабаритных изделий космической техники и позволяет повысить их эксплуатационные характеристики и расширить функциональные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка гусеничная сменная для трактора | 2017 |
|
RU2658505C1 |
| СПОСОБ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2229993C2 |
| Прессующая установка для формования железобетонных изделий и ее элементы | 1991 |
|
SU1838100A3 |
| Гравитационный роликовый конвейер | 1977 |
|
SU686945A1 |
| КОНТЕЙНЕР | 2004 |
|
RU2272766C2 |
| НАГРУЗОЧНОЕ УСТРОЙСТВО | 2011 |
|
RU2453823C1 |
| Рабочий орган вертикального цепного конвейера | 1987 |
|
SU1606396A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ | 2006 |
|
RU2312779C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |


Изобретение относится к оборудованию для транспортировки космических аппаратов с завода-изготовителя. На переходной площадке 3 для крепления груза платформы закреплены несущие штанги, контактирующие своими наружными цилиндрическими поверхностями с эквидистантными поверхностями фигурных ходовых катков, покрытых упругим материалом и шарнирно установленных на раме платформы. С несущими штангами сферическими шарнирами связаны направляющие штыри, толкатели которых контактируют с упругими компенсаторами рамы. Изобретение обеспечивает компенсация угловых перемещений переходной площадки, расширяет функциональные возможности и повышает эксплуатационные характеристики. 5 ил.
Платформа, содержащая раму с ходовой частью, переходную площадку для крепления груза, установленную на раме с возможностью перемещения в продольном направлении и взаимодействия с упругими компенсаторами, размещенными на направляющих штырях, установленных на раме по обе стороны переходной площадки посредством внешних и внутренних опорных кронштейнов, отличающаяся тем, что на переходной площадке в продольном направлении рамы закреплены несущие штанги, контактирующие своими наружными цилиндрическими поверхностями с эквидистантными поверхностями верхних и нижних фигурных ходовых катков, покрытых упругим материалом, например, резиной, при этом верхние и нижние фигурные ходовые катки шарнирно установлены на приемных кронштейнах, закрепленных на раме по обе стороны переходной площадки между внутренними опорными кронштейнами, а направляющие штыри связаны с несущими штангами посредством сферических шарниров, при этом на направляющих штырях закреплены внешние и внутренние толкатели, контактирующие с обращенными к ним торцевыми поверхностями упругих компенсаторов.
| Транспортное средство | 1978 |
|
SU933497A1 |
| Транспортное средство для перевозки контейнеров | 1981 |
|
SU992265A1 |
| Устройство для крепления грузов на платформе транспортного средства | 1981 |
|
SU965837A1 |
| Устройство для аэрозольного проявления электрофотографических,преимущественно электрорентгенографических изображений | 1980 |
|
SU938244A1 |
| GB1007460 А, 13.10.1965. | |||

