Изобретение относится к способам идентификации и определения местоположения подвижных объектов.
Известна система автоматической идентификации САИД "Пальма" (http://www.chirti.ru/palma.htm), разработанная для применения на железной дороге. При проследовании контрольного пункта считывания кодовые датчики, укрепленные на подвижном составе, облучаются непрерывным высокочастотным сигналом, который формируется генератором напольного считывающего устройства (НСУ). Каждый датчик, попав в зону облучения, модулирует этот сигнал в соответствии с заложенным в его памяти информационным кодом и отражает его. Отраженный модулированный сигнал воспринимается антенной НСУ, декодируется и в виде двоичной информации поступает в запоминающее устройство элемента НСУ. Затем с каждого НСУ информация, содержащая код пункта считывания, направление следования, время проследования, перечень считанных номеров единиц подвижного состава (идентификационных кодов), передается в центр обработки. По направлению следования, скорости движения состава можно определить местоположение датчика.
Недостатками системы являются необходимость оборудования железнодорожных путей большим количеством напольных считывающих устройств (НСУ), т.к. идентифицировать и отследить перемещение датчика можно только в ограниченной зоне в пределах 3-5 метров от контрольного пункта считывания при движении состава.
Известна также система запроса пассивных меток по патенту США №4,737,790, в которой использован способ радиолокации, заключающийся в том, что пассивный (т.е. без питания) датчик (метка) после получения на входе первого радиочастотного сигнала запроса, переданного с запросчика системы, производит второй сигнал ответа на выходе. При этом происходит трансформация принятого сигнала, т.е. преобразование первого сигнала во второй с заранее известной задержкой и заранее известной модификацией амплитуды. Элементы преобразования сигнала вносят заранее известный информационный код, уникальный для каждого датчика. Такие датчики называют также транспондерами. Устройство приема и декодирования, расположенное рядом с запросчиком, состоит из устройства для приема второго сигнала и смесителя для проведения квадрантного умножения первого и второго сигналов для получения третьего сигнала, содержащего разностные частоты первого и второго сигналов соответственно. Система включает в себя сигнальный процессор, чувствительный к третьему сигналу для выявления фаз и амплитуд соответствующих разностных частот, содержащихся в третьем сигнале, на основе анализа которых определяется информационный код, соответствующий запрошенному транспондеру.
К недостаткам этого способа можно отнести следующее.
При одновременном приеме ответных сигналов нескольких меток возможно наличие коллизий, что снижает достоверность идентификации конкретной метки. Так как в качестве меток применяются пассивные транспондеры поверхностной звуковой волны (ПЗВ), для получения приемлемого соотношения сигнала/шум, при приеме сигнала от транспондера мощность излученного, затем модулированного сигнала должна быть более 2 Вт. При этом расстояние между запросчиком/приемником и транспондером, на котором возможна идентификация последнего, не превышает 5 м.
Наиболее близким аналогом заявляемого изобретения является способ идентификации и определения местоположения по патенту США №4,737,790, который и выбран в качестве прототипа.
Основной технической задачей, на решение которой направлено заявляемое изобретение, является повышение достоверности идентификации и определения местоположения транспондера в любой точке контролируемого пространства площадью до 500000 кв.м.
Указанный технический результат достигается тем, что в способе идентификации и определения местоположения, заключающемся в передаче стационарными станциями сигнала запроса, приема его транспондерами и передаче ответного сигнала, содержащего идентификационный код, сигналы запроса передают всем транспондерам несколькими стационарными станциями одновременно, а местоположение каждого из транспондеров определяют в центре обработки по максимуму функции правдоподобия, представляющей собой произведение взаимокорреляционных функций сигналов, принимаемых от соответствующего транспондера для всех несовпадающих пар станций, причем обмен сообщениями между центром обработки, стационарными станциями и транспондерами осуществляется с использованием протокола множественного доступа с временным разделением, в котором каждому транспондеру в сигнале запроса выделен заранее определенный слот.
Способ идентификации и определения местоположения реализуют следующим образом. Исходя из условий конкретной задачи, устанавливается длительность кадра. Каждый кадр делится на временные интервалы - слоты. Каждому транспондеру назначается определенный слот. Совокупность слотов в разных кадрах образует временной канал связи. Транспондер формирует код, который передается в ответном сигнале на стационарную станцию. Центр обработки инициирует процесс запуска измерений. Стационарные станции одновременно передают псевдослучайную последовательность (ПСП) начала кадра, затем управляющую информацию, относящуюся ко всем транспондерам в рабочем поле, затем - в начале тайм-слота ПСП с кодом вызываемого транспондера - сигнал опроса. Вызываемый транспондер после приема сигнала опроса передает ответный сигнал в заданный временной интервал, номер интервала определяется управляющей информацией, синхронизация станций во времени осуществляется с помощью временной шкалы ГЛОНАСС или GPS. Приняв ПСП начала слота, транспондер передает сигнал для определения местоположения, затем ПСП со своим идентификационным номером. Сигнал транспондера, принятый базовой станцией, оцифровывается, проходит корреляционную обработку с опорным сигналом и в виде файла данных передается в центр обработки. Транспондер идентифицируется, если корреляция его опорного сигнала с принятым сигналом максимальная и превышает некоторый порог. Центр обработки по информации с каждой базовой станции о принятом сигнале вычисляет взаимокорреляционную функцию принятых сигналов для каждой несовпадающей пары станций. Алгоритм нахождения координат источника как координат максимума функции правдоподобия, построенной на вычислении взаимокорреляционных функций принимаемого несколькими разнесенными в пространстве станциями сигнала при использовании метода фокусировки следующий:
1. На первом шаге вычисляются модули взаимокорреляционных функций принимаемых сигналов на каждой несовпадающей паре станций. Каждая из взаимокорреляционных функций имеет некоторую временную структуру с явно выраженным максимумом или несколькими максимумами (фиг.1).
2. Каждая взаимокорреляционная функция проецируется на плоскость (X, Y) контролируемой области, где находится источник, путем введения координат сканирования для каждой пары станций, с использованием преобразования времени прихода сигнала к разности расстояний от каждой станции рассматриваемой пары до произвольной точки контролируемого пространства.

где:
Rxy_stxy,st:=|Rxyxy-R_stst|
координаты сканирования (расстояние от произвольной точки плоскости контролируемой области до станции);
индекс пары станций.
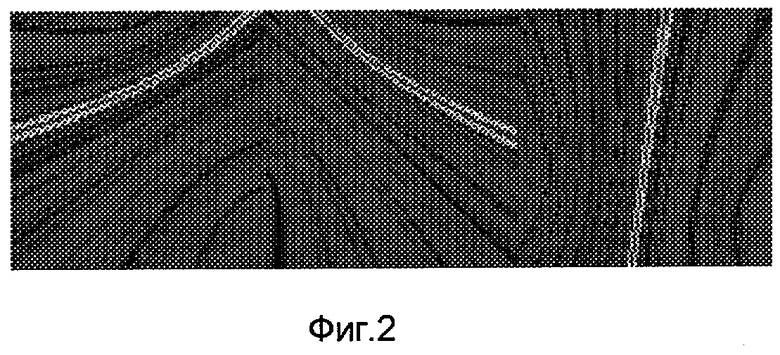
При этом взаимокорреляционные функции являются функциями координат (х, у), имеющими максимум, представляющими собой в проекции на плоскость некоторую линию - в данном случае, гиперболы. На фиг.2 изображены гиперболы, соответствующие комбинациям станций: 0-1, 0-2, 1-2.
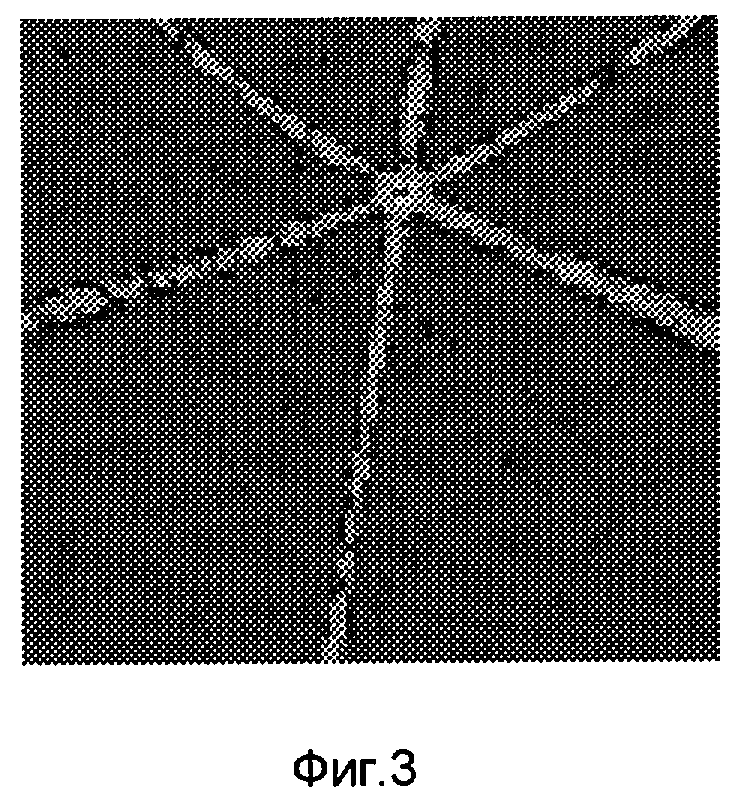
3. Все функции перемножаются, образуя функцию правдоподобия. В проекции на плоскость это соответствует наложению гипербол взаимокорреляционных функций. Пересечение гипербол на плоскости определяет область локализации источника (фиг.3). По известному шагу сетки (Х, У) (шагу сканирования) определяется нулевое приближение координат метки (нулевая итерация).
4. Далее определяются координаты максимума функции правдоподобия в области локализации, которые и есть наиболее правдоподобные координаты источника. На первой итерации уточняются координаты максимума путем его аппроксимации квадратичной формой и обращения этой квадратичной формы. Далее делаются еще три итерации: решается уравнение баланса разностных времен; ошибки координат декоррелируются со значениями координат; ошибки по координатам Х и Y декоррелируются между собой. Ошибки в определении координат транспондера (источника) уменьшаются на каждом шаге вычислений уточняющем координаты максимума.
Преимущества заявляемого способа в части повышения достоверности идентификации и определения местоположения подвижных объектов обеспечивают за счет:
- алгоритма связи с временным разделением, когда транспондеры работают на передачу блока информации только в отведенные интервалы времени, а в остальное время на прием, что решает проблему коллизий;
- алгоритма вычислений координат транспондера по информации об ответном сигнале транспондера с каждой несовпадающей пары станций, что позволяет более точно определять местоположение транспондера, при этом для минимизации объема вычислений оптимально использовать 3-4 стационарные станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| СИСТЕМА КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ С СИСТЕМОЙ ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА | 2004 |
|
RU2265889C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2023 |
|
RU2809767C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| СПОСОБ И КОМПОНОВКА ДЛЯ УПРАВЛЕНИЯ ВЫХОДНОЙ ГРОМКОСТЬЮ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО АКУСТИЧЕСКОГО УСТРОЙСТВА | 2017 |
|
RU2705716C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАЗЫСКИВАЕМЫХ ТРАНСПОНДЕРОВ ИЗ МНОЖЕСТВА ПАССИВНЫХ ТРАНСПОНДЕРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497147C2 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
Изобретение относится к способам идентификации и определения местоположения подвижных объектов. Достигаемым техническим результатом изобретения является повышение достоверности идентификации и определения местоположения транспондера в любой точке контролируемого пространства. Способ основан на определении координат объекта как координат максимума функции правдоподобия, построенной на вычислении взаимокорреляционных функций сигнала датчика, принимаемого несколькими разнесенными в пространстве станциями с опорным сигналом. Связь между транспондерами и стационарными станциями осуществляется с помощью протокола множественного доступа с временным разделением, когда транспондеры работают на передачу информации только в отведенные интервалы времени, а в остальное время - на прием. После обработки информации об ответном сигнале транспондера с каждой несовпадающей пары станций идентификация объекта происходит со 100% степенью достоверности, а местоположение объекта определяется с точностью до 15-30 м. 3 ил.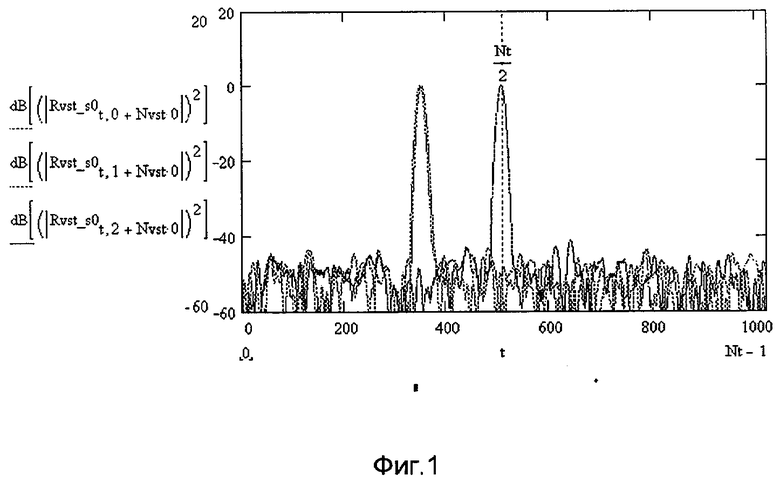
Способ идентификации и определения местоположения подвижных объектов с транспондерами, заключающийся в передаче стационарными станциями сигнала запроса, приеме его транспондерами и передаче ответного сигнала, содержащего идентификационный код, отличающийся тем, что сигналы запроса передают всем транспондерам несколькими стационарными станциями одновременно, идентифицируют транспондер на стационарной станции по принятому идентификационному коду и максимальной корреляции опорного сигнала стационарной станции, соответствующего данному транспондеру, с принятым на стационарной станции ответным сигналом транспондера, превышающей некоторый порог, в центре обработки по информации с каждой стационарной станции о принятом ответном сигнале вычисляют произведение взаимокорреляционных функций, представляющее собой функцию правдоподобия, по максимуму которой и определяют местоположение каждого из транспондеров и соответствующего ему подвижного объекта, причем обмен сообщениями между центром обработки, стационарными станциями и транспондерами осуществляется с использованием протокола множественного доступа с временным разделением, в котором каждому транспондеру в сигнале запроса выделен заранее определенный слот.
| US 4737790, 12.04.1998 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ МНОЖЕСТВА ТРАНСПОНДЕРОВ, АНАЛИЗИРУЮЩЕЕ УСТРОЙСТВО И ТРАНСПОНДЕР | 1998 |
|
RU2210109C2 |
| RU 2003124372 A, 10.02.2005 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |
| US 4292637 A, 29.09.1981 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| EP 0689151 A1, 27.09.2002. | |||

