Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных объектов, обнаруживаемых бортовой РЛС.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации воздушных объектов, реализуемый в радиолокационной системе с активным ответом (РСАО), основанный на их обнаружении и измерении дальностей до них с помощью бортовой РЛС в течение цикла обзора пространства, формировании и передаче кодированного запросного сигнала запросчиком РСАО в направлении каждого i-го воздушного объекта, где  I - число обнаруженных воздушных объектов, приеме и обработке данного запросного сигнала ответчиком РСАО на борту каждого k-го воздушного объекта, где
I - число обнаруженных воздушных объектов, приеме и обработке данного запросного сигнала ответчиком РСАО на борту каждого k-го воздушного объекта, где  K - число воздушных объектов, оборудованных ответчиком РСАО, из числа обнаруженных воздушных объектов, формировании и передаче кодированного ответного сигнала ответчиком РСАО с борта каждого k-го воздушного объекта, приеме и обработке данных ответных сигналов, а также формировании текущих оценок идентификационных признаков обнаруженных воздушных объектов
K - число воздушных объектов, оборудованных ответчиком РСАО, из числа обнаруженных воздушных объектов, формировании и передаче кодированного ответного сигнала ответчиком РСАО с борта каждого k-го воздушного объекта, приеме и обработке данных ответных сигналов, а также формировании текущих оценок идентификационных признаков обнаруженных воздушных объектов  запросчиком РСАО, где g∈[0,1], q=1 - идентификационный признак воздушного объекта, оборудованного ответчиком РСАО и правильно отвечающего на запросный сигнал, q=0 - идентификационный признак воздушного объекта, не оборудованного ответчиком РСАО или не правильно отвечающего на запросный сигнал (см., например, Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. - 656 с. С. 623).
запросчиком РСАО, где g∈[0,1], q=1 - идентификационный признак воздушного объекта, оборудованного ответчиком РСАО и правильно отвечающего на запросный сигнал, q=0 - идентификационный признак воздушного объекта, не оборудованного ответчиком РСАО или не правильно отвечающего на запросный сигнал (см., например, Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. - 656 с. С. 623).
К недостаткам данного способа относится низкая вероятность правильной идентификации воздушных объектов в условиях высокой их пространственной плотности. Основной причиной этого является возникновение ошибочных оценок идентификационных признаков воздушных объектов в результате наложения ответных сигналов нескольких воздушных объектов, находящихся в пределах объема неопределенности РСАО, а также в результате привязки к обнаруженному воздушному объекту ответного сигнала другого воздушного объекта, находящегося в пределах объема неопределенности РСАО.
Техническим результатом изобретения является повышение вероятности правильной идентификации воздушных объектов в рамках подсистемы прямой идентификации (ППИ), образуемой бортовой РЛС, РСАО и устройством обработки информации (УОИ). Технический результат обеспечивается по окончании цикла обзора пространства бортовой РЛС исправлением всех или части ошибочных оценок идентификационных признаков обнаруженных воздушных объектов, сформированных РСАО в течение цикла обзора пространства (текущих оценок идентификационных признаков воздушных объектов), за счет учета влияния на данные оценки пространственной плотности воздушных объектов.
Указанный результат достигается тем, что в известном способе идентификации по окончании цикла обзора пространства бортовой РЛС оценивают пространственную плотность воздушных объектов с идентификационными признаками q=1 для каждого j, где  J - число состояний вектора возможных идентификационных признаков обнаруженных воздушных объектов, оценивают объем неопределенности радиолокационной системы с активным ответом для каждого i, определяют вероятности формирования правильных текущих оценок идентификационных признаков обнаруженных воздушных объектов с учетом их пространственной плотности, определяют функцию правдоподобия вектора возможных идентификационных признаков обнаруженных воздушных объектов по отношению к их текущим оценкам для каждого j и вектор возможных идентификационных признаков обнаруженных воздушных объектов, соответствующий максимуму данной функции правдоподобия, принимают в качестве вектора итоговых оценок идентификационных признаков обнаруженных воздушных объектов.
J - число состояний вектора возможных идентификационных признаков обнаруженных воздушных объектов, оценивают объем неопределенности радиолокационной системы с активным ответом для каждого i, определяют вероятности формирования правильных текущих оценок идентификационных признаков обнаруженных воздушных объектов с учетом их пространственной плотности, определяют функцию правдоподобия вектора возможных идентификационных признаков обнаруженных воздушных объектов по отношению к их текущим оценкам для каждого j и вектор возможных идентификационных признаков обнаруженных воздушных объектов, соответствующий максимуму данной функции правдоподобия, принимают в качестве вектора итоговых оценок идентификационных признаков обнаруженных воздушных объектов.
Сущность изобретения заключается в том, что итоговые оценки идентификационных признаков обнаруженных воздушных объектов формируются по окончании цикла обзора пространства бортовой РЛС с учетом их пространственной плотности по критерию максимума функции правдоподобия по отношению к текущим оценкам их идентификационных признаков, сформированным РСАО в течение цикла обзора пространства бортовой РЛС. Это позволяет исправлять все или часть ошибочных текущих оценок идентификационных признаков обнаруженных воздушных объектов, сформированных РСАО в течение цикла обзора пространства бортовой РЛС и возникающих в условиях высокой пространственной плотности воздушных объектов.
Данный способ включает в себя следующие этапы:
1. В течение цикла обзора пространства бортовой РЛС:
1.1. Обнаружение с помощью бортовой РЛС воздушных объектов и измерение дальностей до них  в соответствии с прототипом;
в соответствии с прототипом;
1.2. Формирование и передача кодированного запросного сигнала запросчиком РСАО в соответствии с прототипом;
1.3. Прием и обработка запросного сигнала ответчиком РСАО на борту каждого k-го воздушного объекта в соответствии с прототипом;
1.4. Формирование и передача кодированного ответного сигнала ответчиком РСАО с борта каждого k-го воздушного объекта в соответствии с прототипом;
1.5. Прием, обработка ответных сигналов и формирование текущих оценок идентификационных признаков обнаруженных воздушных объектов  запросчиком РСАО в соответствии с прототипом;
запросчиком РСАО в соответствии с прототипом;
2. По окончании цикла обзора пространства бортовой РЛС:
2.1. Ввод исходных данных: D*, q*, δDq, δθq, δVr, где δDq и δθq - разрешающие способности РСАО по дальности и угловым координатам соответственно, δVr - объем зоны поиска бортовой РЛС;
2.2. Ввод вектора возможных идентификационных признаков обнаруженных воздушных объектов для каждого 
2.3. Оценка пространственной плотности воздушных объектов ρj с идентификационными признаками q=1 для каждого j в соответствии с выражением

где N1j - число идентификационных признаков q=1, содержащихся в j-м векторе возможных идентификационных признаков обнаруженных воздушных объектов qj.
2.4. Оценка объема неопределенности РСАО δVqi для каждого i в соответствии с выражением

2.5. Определение вероятностей формирования правильных текущих оценок идентификационных признаков обнаруженных воздушных объектов в РСАО Pi0j и Pi1j для каждых i0, i1, j, с учетом пространственной плотности обнаруженных воздушных объектов, в соответствии с выражениями


где Pi0 - вероятность формирования РСАО правильной текущей оценки идентификационного признака q=0, Pi1j - вероятность формирования РСАО правильной текущей оценки идентификационного признака q=1,  I0=I1=I, I0 - число идентификационных признаков q=0, содержащихся в j-м векторе qj, I1 _ число идентификационных признаков q=1, содержащихся в j-м векторе qj;
I0=I1=I, I0 - число идентификационных признаков q=0, содержащихся в j-м векторе qj, I1 _ число идентификационных признаков q=1, содержащихся в j-м векторе qj;
2.6. Определение функции правдоподобия вектора возможных идентификационных признаков обнаруженных воздушных объектов  по отношению к их текущим оценкам для каждого j в соответствии с выражением
по отношению к их текущим оценкам для каждого j в соответствии с выражением
2.7. Формирование решения о векторе итоговых оценок идентификационных признаков обнаруженных воздушных объектов по максимуму функции правдоподобия в соответствии со следующим решающим правилом

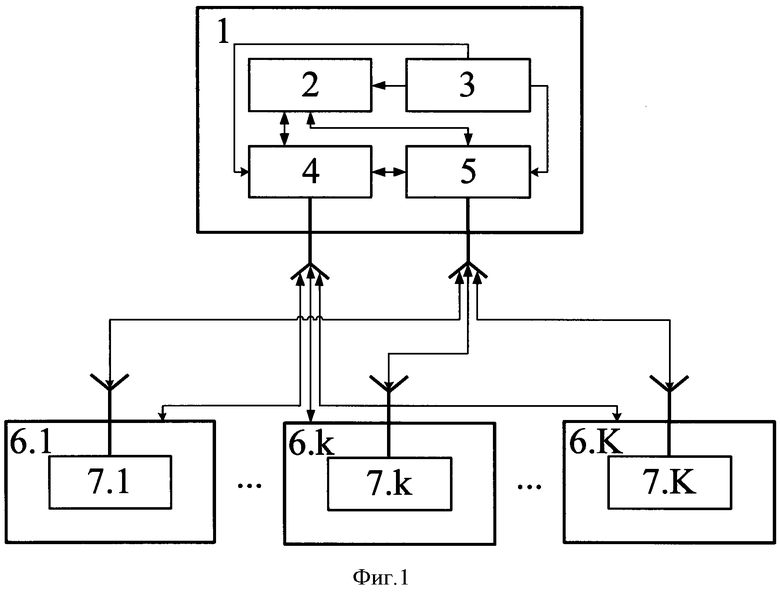
Данный способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фиг.1, где обозначено: 1 - идентифицирующий объект, 2 - устройство обработки информации; 3 - синхронизатор; 4 - бортовая РЛС; 5 - запросчик РСАО; 6.1, …6.k, …6.K - воздушные объекты с идентификационным признаком q=1; 7.1, …1.k, …7.K - ответчики РСАО, располагаемые на воздушных объектах 6.1, …6.k, …6.K соответственно.
Устройство обработки информации 2 предназначено для обработки информации, поступающей от бортовой РЛС 4 и запросчика РСАО 5 в соответствии с выражениями (1-5), а также для формирования решения о векторе итоговых оценок идентификационных признаков q** обнаруженных воздушных объектов в соответствии с выражением (6). Синхронизатор 3 предназначен для синхронизации работы элементов устройства на борту идентифицирующего объекта 1. Бортовая РЛС 4 предназначена для обнаружения воздушных объектов и измерения дальностей до них  в течение цикла обзора пространства на стороне идентифицирующего объекта 1 в соответствии с прототипом. Запросчик РСАО 5 предназначен для формирования и передачи кодированного запросного сигнала, для приема и обработки кодированных ответных сигналов, переданных с ответчиков РСАО 7.1, …7.k, …1.K, а также для формирования текущих оценок идентификационных признаков
в течение цикла обзора пространства на стороне идентифицирующего объекта 1 в соответствии с прототипом. Запросчик РСАО 5 предназначен для формирования и передачи кодированного запросного сигнала, для приема и обработки кодированных ответных сигналов, переданных с ответчиков РСАО 7.1, …7.k, …1.K, а также для формирования текущих оценок идентификационных признаков  обнаруженных воздушных объектов в соответствии с прототипом. Ответчики РСАО 7.1, …7.k, …1.K предназначены для приема и обработки кодированного запросного сигнала на борту воздушных объектов 6.1, …6.k, …6.K, а также для формирования и передачи кодированных ответных сигналов.
обнаруженных воздушных объектов в соответствии с прототипом. Ответчики РСАО 7.1, …7.k, …1.K предназначены для приема и обработки кодированного запросного сигнала на борту воздушных объектов 6.1, …6.k, …6.K, а также для формирования и передачи кодированных ответных сигналов.
Устройство работает следующим образом. Синхронизатор 3 синхронизирует работу элементов устройства на борту идентифицирующего объекта 1. В течение цикла обзора пространства бортовая РЛС 4 обнаруживает воздушные объекты и формирует оценки дальностей до них  на стороне идентифицирующего объекта 1 в соответствии с прототипом. После обнаружения очередного воздушного объекта запросчик РСАО 5 формирует и передает кодированный запросный сигнал в соответствии с прототипом. Ответчики РСАО 7.1, …7.k, …1.K принимают и обрабатывают данный запросный сигнал по мере его поступления на воздушные объекты 6.1, …6.k, …6.K и затем формируют и передают кодированные ответные сигналы в соответствии с прототипом. Запросчик РСАО принимает и обрабатывает данные ответные сигналы, а также формирует текущие оценки идентификационных признаков
на стороне идентифицирующего объекта 1 в соответствии с прототипом. После обнаружения очередного воздушного объекта запросчик РСАО 5 формирует и передает кодированный запросный сигнал в соответствии с прототипом. Ответчики РСАО 7.1, …7.k, …1.K принимают и обрабатывают данный запросный сигнал по мере его поступления на воздушные объекты 6.1, …6.k, …6.K и затем формируют и передают кодированные ответные сигналы в соответствии с прототипом. Запросчик РСАО принимает и обрабатывает данные ответные сигналы, а также формирует текущие оценки идентификационных признаков  обнаруженных воздушных объектов в соответствии с прототипом. По окончании цикла обзора пространства бортовой РЛС 4 информация от данной станции и РСАО поступает в устройство обработки информации 2. Устройство обработки информации 2 обрабатывает информацию, поступившую от бортовой РЛС 4 и запросчика РСАО 5 в соответствии с выражениями (1-5), и формирует решение о векторе итоговых оценок идентификационных признаков q обнаруженных воздушных объектов в соответствии с выражением 6.
обнаруженных воздушных объектов в соответствии с прототипом. По окончании цикла обзора пространства бортовой РЛС 4 информация от данной станции и РСАО поступает в устройство обработки информации 2. Устройство обработки информации 2 обрабатывает информацию, поступившую от бортовой РЛС 4 и запросчика РСАО 5 в соответствии с выражениями (1-5), и формирует решение о векторе итоговых оценок идентификационных признаков q обнаруженных воздушных объектов в соответствии с выражением 6.
Для определения эффективности предлагаемого способа путем проведения статистических испытаний на имитационных моделях ППИ и РСАО оценивались показатели P и P1, где P - вероятность правильной идентификации воздушных объектов в ППИ, функционирующей в соответствии с предлагаемым способом; P1 - вероятность правильной идентификации воздушных объектов в РСАО, функционирующей в соответствии с прототипом.
Для характеристики эффективности предлагаемого способа определялся прирост вероятности правильной идентификации воздушных объектов в ППИ за счет применения предлагаемого способа по отношению к данному показателю с применением прототипа
В зависимости от условий проводимых испытаний данный прирост составил до 10%.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ комплексной обработки информации от РСАО и бортовой РЛС в рамках подсистемы прямой идентификации с учетом пространственной плотности воздушных объектов в зоне поиска бортовой РЛС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что применение комплексной обработки информации от бортовой РЛС и РСАО с учетом пространственной плотности воздушных объектов увеличивает вероятность их правильной идентификации.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
| Способ прямой идентификации воздушных целей | 2018 |
|
RU2701721C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2018 |
|
RU2708078C1 |
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2024 |
|
RU2831760C1 |
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных объектов, обнаруживаемых бортовой радиолокационной станцией (РЛС). Достигаемый технический результат - повышение вероятности правильной идентификации воздушных объектов в рамках подсистемы прямой идентификации, образуемой бортовой РЛС, радиолокационной системы с активным ответом и устройством обработки информации. Сущность изобретения заключается в том, что итоговые оценки идентификационных признаков обнаруженных воздушных объектов формируются по окончании цикла обзора пространства бортовой РЛС с учетом их пространственной плотности по критерию максимума функции правдоподобия по отношению к текущим оценкам их идентификационных признаков, сформированным радиолокационной системой с активным ответом в течение цикла обзора пространства бортовой РЛС. Это позволяет исправлять все или часть ошибочных текущих оценок идентификационных признаков обнаруженных воздушных объектов, сформированных радиолокационной системой с активным ответом в течение цикла обзора пространства бортовой РЛС и возникающих в условиях высокой пространственной плотности воздушных объектов. 1 ил.
Способ идентификации воздушных объектов, основанный на их обнаружении и измерении дальностей до них с помощью бортовой РЛС в течение цикла обзора пространства, формировании и передаче кодированного запросного сигнала запросчиком радиолокационной системы с активным ответом в направлении каждого i-го воздушного объекта, где 



| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Под ред | |||
| КАНАЩЕНКОВА А.И | |||
| и др., Москва, "Радиотехника", 2006, с.623 | |||
| Паровой трубчатый подогреватель вибрационного типа | 1959 |
|
SU130410A1 |
| СПОСОБ РАДИОКОНТРОЛЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444753C1 |
| Устройство для набора и взвешивания шихты вагон-весами доменной печи | 1951 |
|
SU95861A1 |
| US 5483241 A, 09.01.1996 | |||
| EP 689150 B1, 29.03.2000 | |||
| WO 2010008692 A1, 21.01.2010. | |||

